Изобретение относится к области радиолокации и может быть использовано в автоматизированных системах контроля воздушного пространства, управления воздушным движением, а также в специальных автоматизированных системах управления воздушно-космической обороны.
Известные способы юстировки РЛС основаны на использовании отражающих или излучающих объектов, положение которых (координаты) заведомо определено точно.
Известны способы юстировки радиолокационных станций по местным предметам, положение которых определено оптическими или геодезическими средствами. Однако при этом требуется наличие на местности отдельно стоящих отражающих объектов или специально установленных на вышках отражателей или излучателей, что требует больших затрат. Известные способы юстировки РЛС по радиоизлучению солнца или других небесных тел требуют значительного времени для ее проведения и определенных погодных условий.
Известен также способ юстировки РЛС, при котором используют воздушные объекты с точно измеренными координатами. Недостатком этого способа является невозможность правильной юстировки в случаях, когда координаты юстируемой РЛС определены с ошибками.
Известны способы (авторские свидетельства №2069867 по МПК G01S 7/49 и №2094816 по МПК G01S 7/40), наиболее близкие по совокупности признаков и заключающиеся в том, что в процессе юстировки определяют расхождения Δх, Δу между прямоугольными координатами воздушных объектов, измеряемыми двумя РЛС. Полученные величины расхождений используют для определения с помощью специальных формул ошибок юстировки (поправок) в азимут, измеряемый РЛС. При юстировке определенной РЛС вторая РЛС является вспомогательной и должна быть заранее отъюстирована. Способы предусматривают отсутствие ошибок вспомогательной РЛС по азимуту и по дальности. Если юстировка вспомогательной РЛС содержит погрешности, то юстировка настраиваемой РЛС также будет содержать ошибки.
Предлагаемый способ юстировки заключается в том, что на настраиваемой РЛС находится спутниковый навигатор, точно определяющий по данным со спутника координаты местонахождения РЛС. На РЛС также находится приемник автоматического зависимого наблюдения, принимающий от воздушных объектов координаты их текущего местонахождения. Эти координаты воздушные объекты также получают от спутникового навигатора. Зная точно координаты собственного местонахождения и точные координаты наблюдаемого воздушного объекта, легко произвести корректировку юстировки РЛС.
Техническим результатом использования предлагаемого способа является существенно более высокая точность юстировки РЛС, т.к. точность определения координат собственной точки стояния РЛС и координат воздушного объекта от спутниковых навигаторов составляет единицы метров, что в разы точнее ранее использовавшихся методов.
Воздушные объекты, наблюдаемые РЛС, могут быть случайными (пролетающими по территории, контролируемой РЛС) или специально вызванными (например, вертолеты) для юстировки РЛС территориальной АСУ. Спутниковый навигатор и приемник сигналов автоматического зависимого наблюдения могут привлекаться для юстировки РЛС или быть штатными приборами, входящими в состав оборудования РЛС. В подвижных комплексах РЛС эти относительно недорогие устройства конечно должны входить в состав оборудования РЛС.
Технический результат при использовании предлагаемого способа достигается за счет использования новейших информационных технологий, спутниковых навигаторов и возможностей новейшей системы автоматического зависимого наблюдения.
На фиг.1 схематично представлено расположение юстируемой РЛС 1 и воздушного объекта 2, информация от которого используется для юстировки.
Способ осуществляется следующим образом. Юстируемая РЛС 1 с помощью спутникового навигатора определяет координаты собственной точки стояния в прямоугольной системе координат (x1, y1) и определяет координаты наблюдаемого воздушного объекта 2 (х2, y2). От приемника автоматического зависимого наблюдения РЛС получает коды, передаваемые в эфир воздушным объектом и содержащие координаты текущего его местоположения в точке 3. Полученные координаты также преобразуются в прямоугольную систему координат (х3, у3).
Вследствие изначально ошибочной юстировки РЛС измеренные координаты воздушного объекта 2 (х2, y2) будут отличаться от его истинных координат, определенных бортовым спутниковым навигатором (х3, у3). Взаимное расстояние точек 2 и 3 характеризуется расхождениями координат Δх=x3-х2, Δу=у2-у3. Эти расхождения однозначно связаны с ошибками юстировки по азимуту Δβ=β1-β2. При этом
 и
и  , отсюда
, отсюда
 и
и  ,
,
а ошибка юстировки  .
.
Используя математическое свойство
получаем выражение ошибки по азимуту для юстируемой РЛС с преимущественно арифметическими операциями, легко выполняемыми в ЭВМ
 .
.
Расстояние до наблюдаемого воздушного объекта в точке 2

и расстояние до воздушного объекта в точке 3

Основными преимуществами предлагаемого способа юстировки по сравнению с существующими являются упрощение процесса юстировки, особенно в территориальных радиолокационных системах, определение поправок без вывода РЛС из режима нормального функционирования, возможность использования в качестве контрольных случайных воздушных объектов, пролетающих в зоне действия РЛС, в процессе их работы в автоматизированной системе.
Высокая точность определения местоположения РЛС и воздушного объекта (объектов) по данным спутниковых навигаторов (в пределах единиц метров) позволяет производить юстировку РЛС с очень высокой точностью. Аналитические расчеты и статистическое моделирование показывают, что необходимая точность определения поправок для обзорных РЛС может быть получена за единицы минут при периоде обзора 10 с. Процесс юстировки может быть многошаговым, то есть используется итерационный процесс, когда с каждым последующим шагом повышается точность юстировки. Юстировку можно производить периодически, устраняя погрешности, возникающие в процессе эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЮСТИРОВКИ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2012 |
|
RU2529875C2 |
| СПОСОБ ЮСТИРОВКИ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1993 |
|
RU2069867C1 |
| СПОСОБ ЮСТИРОВКИ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1995 |
|
RU2094816C1 |
| СПОСОБ ЮСТИРОВКИ БОРТОВЫХ РАДИОЛОКАЦИОННОЙ И ОПТИКО-ЭЛЕКТРОННОЙ СТАНЦИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2757679C1 |
| СПОСОБ ОЦЕНИВАНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ В ДВУХПОЗИЦИОННОЙ УГЛОМЕРНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2003 |
|
RU2246121C9 |
| СПОСОБ ОЦЕНИВАНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ В УГЛОМЕРНОЙ ДВУХПОЗИЦИОННОЙ ПАССИВНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2004 |
|
RU2263927C2 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ВОЗДУШНЫМИ ОБЪЕКТАМИ И ПОВЕРХНОСТЬЮ НА БАЗЕ БОРТОВОЙ РЛС | 2005 |
|
RU2292060C1 |
| УСТРОЙСТВО ЛОКАЦИИ И НАВИГАЦИИ | 2012 |
|
RU2525228C2 |
| СПОСОБ ЮСТИРОВКИ ПО УГЛОВЫМ КООРДИНАТАМ ПОДВИЖНОГО РАДИОЛОКАТОРА | 1992 |
|
RU2030759C1 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
Изобретение относится к области радиолокации. Достигаемый технический результат изобретения - повышение точности юстировки радиолокационных станций (РЛС). Указанный результат достигается за счет того, что измеряют координаты отражающего объекта с последующим определением систематических ошибок юстировки, с помощью спутникового навигатора определяют прямоугольные координаты собственной точки стояния РЛС (x1, y1), измеряют юстируемой РЛС прямоугольные координаты воздушного объекта (ВО), находящегося в зоне действия РЛС (х2, y2), принимают на РЛС с помощью радиоприемника автоматического зависимого наблюдения координаты текущего местонахождения воздушного объекта (х3, y3) и определяют величину поправки по азимуту и по дальности для юстируемой РЛС по соответствующим формулам. 1 ил.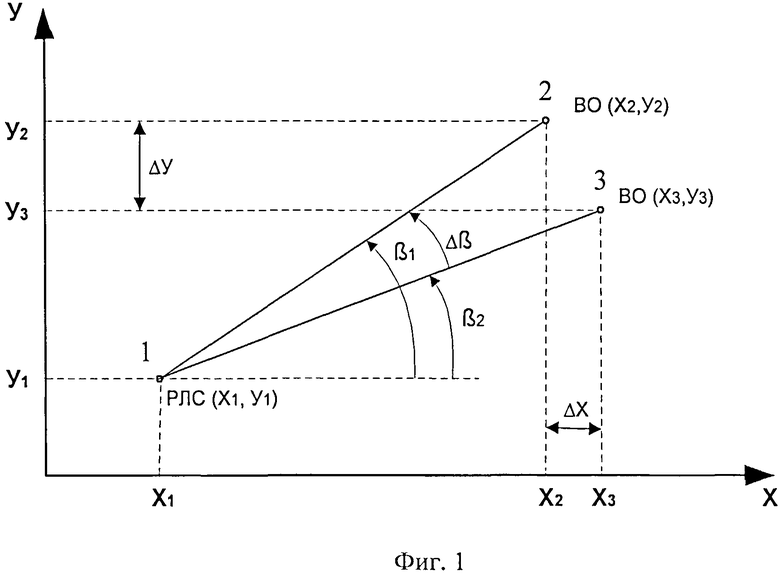
Способ юстировки радиолокационных станций (РЛС), заключающийся в том, что измеряют координаты отражающего объекта с последующим определением систематических ошибок юстировки, отличающийся тем, что с помощью спутникового навигатора определяют прямоугольные координаты собственной точки стояния РЛС (x1, y1), измеряют юстируемой РЛС прямоугольные координаты воздушного объекта (ВО), находящегося в зоне действия РЛС (х2, y2), принимают на РЛС с помощью радиоприемника автоматического зависимого наблюдения координаты текущего местонахождения воздушного объекта (х3, y3) и определяют величину поправки по азимуту для юстируемой РЛС по формуле
и по дальности по формуле

| СПОСОБ ЮСТИРОВКИ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1993 |
|
RU2069867C1 |
| Способ приготовления водной суспензии инсектофунгисидов | 1948 |
|
SU74217A1 |
| МИШЕНЬ ДЛЯ ЮСТИРОВКИ ДВУХДИАПАЗОННОЙ БОРТОВОЙ РЛС | 2000 |
|
RU2196343C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕЛЕНГАЦИОННЫХ ОШИБОК СИСТЕМ АНТЕННА-ОБТЕКАТЕЛЬ САМОЛЕТА С УСТАНОВЛЕННОЙ НА НЕМ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2011 |
|
RU2465611C1 |
| US 5223838 A, 29.06.1993 | |||
| US 20080036648 A1, 14.02.2008 | |||
| Устройство для отбора жидких продуктов | 1973 |
|
SU473082A1 |
| WO 2006013136 A1, 09.02.2006 | |||

