Изобретение относится к радиолокации и может быть использовано в автоматизированных системах контроля воздушного пространства и управления воздушным движением.
Известные способы юстировки радиолокационных станций (РЛС) основаны на использовании отражающих или излучающих объектов, положение которых (координаты) относительно юстируемой РЛС точно определено. Известны способы юстировки по местным предметам, положение которых определено геодезическими или оптическими средствами [1] Однако при этом требуется наличие на местности отдельно стоящих, достаточно высоких отражающих объектов или специально установленных на вышках отражателей или излучателей, что требует определенных затрат. Известные способы юстировки РЛС по радиоизлучению Солнца или других небесных тел требуют значительного времени для ее выполнения и определенных погодных условий. Наиболее близким по совокупности признаков является способ юстировки РЛС, при котором используют воздушные объекты с точно измеряемыми координатами [2] Недостатком этого способа является невозможность правильной юстировки в случаях, когда координаты юстируемой РЛС определены с ошибками.
Сущность изобретения состоит в том, что в процессе юстировки определяют расхождения ΔX, ΔY, ΔX′, ΔY′ между прямоугольными координатами каждого из двух взаимоудаленных воздушных объектов по данным измерений двух отдельно стоящих РЛС. Далее полученные величины расхождений используют для определения с помощью специальных формул ошибок юстировки (поправок), а также величины ошибок в координатах ее дислокации ΔXб, ΔYб При юстировке определенной РЛС вторая РЛС является вспомогательной и должна быть заранее отъюстирована.
На чертеже схематически представлено расположение двух РЛС и положение двух воздушных объектов (ВО), информация от которых используется для юстировки.
Юстируемая РЛС 1 и вспомогательная РЛС 2 определяют координаты воздушных объектов, находящихся в точках 3 и 4. Расчетное положение 5 юстируемой РЛС может быть смещено относительно ее истинного положения. Вследствие этого смещения, а также ошибок локации измеренные координаты ВО 3 и 4 по данным РЛС 1 (X1, Y1) и  соответствуют точкам 6 и 7, а по данным вспомогательной РЛС 2 (X2, Y2) и
соответствуют точкам 6 и 7, а по данным вспомогательной РЛС 2 (X2, Y2) и  точкам 8 и 9. Взаимные расстояния точек 6 и 8 и точек 7 и 9 характеризуются расхождениями прямоугольных координат ΔX, ΔY и ΔX′, ΔY′ соответственно. Эти расхождения однозначно связаны с ошибками измерения координат юстируемой РЛС Δβ, ΔD и ошибками в координатах ее дислокации ΔXб, ΔYб
точкам 8 и 9. Взаимные расстояния точек 6 и 8 и точек 7 и 9 характеризуются расхождениями прямоугольных координат ΔX, ΔY и ΔX′, ΔY′ соответственно. Эти расхождения однозначно связаны с ошибками измерения координат юстируемой РЛС Δβ, ΔD и ошибками в координатах ее дислокации ΔXб, ΔYб
Предлагаемый способ юстировки радиолокационных станций заключается в том, что располагают вспомогательную РЛС на некотором расстоянии от юстируемой РЛС в пределах ее зоны действия, измеряют обеими РЛС координаты любых двух ВО, удаленных друг от друга на расстояние, не менее половины радиуса действия юстируемой РЛС, в пределах зоны обнаружения обеих РЛС, определяют расхождения координат одного из ВО ΔX, ΔY и другого ВО ΔX′, ΔY′ и определяют величину поправок для юстируемой РЛС по азимуту согласно формуле:
и по дальности согласно формуле:
где Ux= ΔX-ΔX′, Uy= ΔY-ΔY′, Lx X X', Ly Y Y', Rs= sinβ-sinβ′, Rc= cosβ-cosβ′, β и β′ азимуты первого и второго ВО относительно юстируемой РЛС.
Затем находят поправки по координатам дислокации юстируемой РЛС согласно формулам
В случаях, когда достаточно известно, что положение юстируемой РЛС определено точно (например, после ремонта или замены РЛС на старой позиции), достаточно информации от одного ВО. В этих случаях определяют поправки для юстируемой РЛС по азимуту и по дальности согласно формулам:
где D расстояние ВО от юстируемой РЛС.
После приведения координат к единой системе отсчета X0, Y0 координаты ВО по данныv двух РЛС принимают значения
где Xб1, Yб1, Xб2, Yб2 координаты дислокации РЛС, индекс "1" относится к юстируемой РЛС, индекс "2" к вспомогательной РЛС. Расхождения координат первого ВО, приведенных к единой системе отсчета X, Y, равны
где ΔX
Аналогично, для координат второго ВО:
Выражения (7) и (8) получены с учетом, что ΔXб2, ΔYб2 и ошибки юстировки вспомогательной РЛС по азимуту и по дальности равны нулю. Эти четыре выражения образуют систему уравнений относительно четырех поправок Δβ, ΔD, ΔXб1, ΔYб1 Вычитая почленно из первого третье и из второго четвертое уравнения этой системы, получаем два уравнения относительно поправок Δβ, ΔD из которых следуют (1) и (2). Возвращаясь к (6) и (7), получаем выражение (3), где индекс "1" опущен для сокращения записи.
В случае отсутствия ошибок в координатах дислокации (ΔXб= 0, ΔYб= 0) из выражений (6), содержащих теперь две неизвестных Δβ и ΔD получаются выражения (4).
Основными преимуществами предлагаемого способа юстировки являются упрощение процесса юстировки, особенно в территориальных радиолокационных системах, определение поправок без вывода РЛС из режима нормального функционирования, возможность оперативной юстировки мобильных РЛС, развертываемых на короткое время, использование в качестве контрольных случайных воздушных объектов, пролетающих в зоне действия двух РЛС в процессе их работы в автоматизированной системе. Аналитические расчеты и статистическое моделирование показывают, что достаточная точность определения поправок для обзорных РЛС может быть получена за 5-8 мин при периоде обзора 10 с.
Способ юстировки радиолокационных станций (РЛС), при котором измеряют координаты отражающего объекта с последующим определением ошибок юстировки, отличающийся тем, что используя информацию вспомогательной РЛС, установленной на некотором расстоянии от юстируемой РЛС, измеряют обеими РЛС координаты двух взаимоудаленных воздушных объектов, находящихся в зоне действия этих РЛС, определяют расхождения между прямоугольными координатами каждого из двух воздушных объектов по данным одной и другой РЛС и определяют с помощью специальных формул величины ошибок юстировки (поправок) по азимуту и по дальности для юстируемой РЛС, а также ошибок в координатах ее дислокации. 1 ил.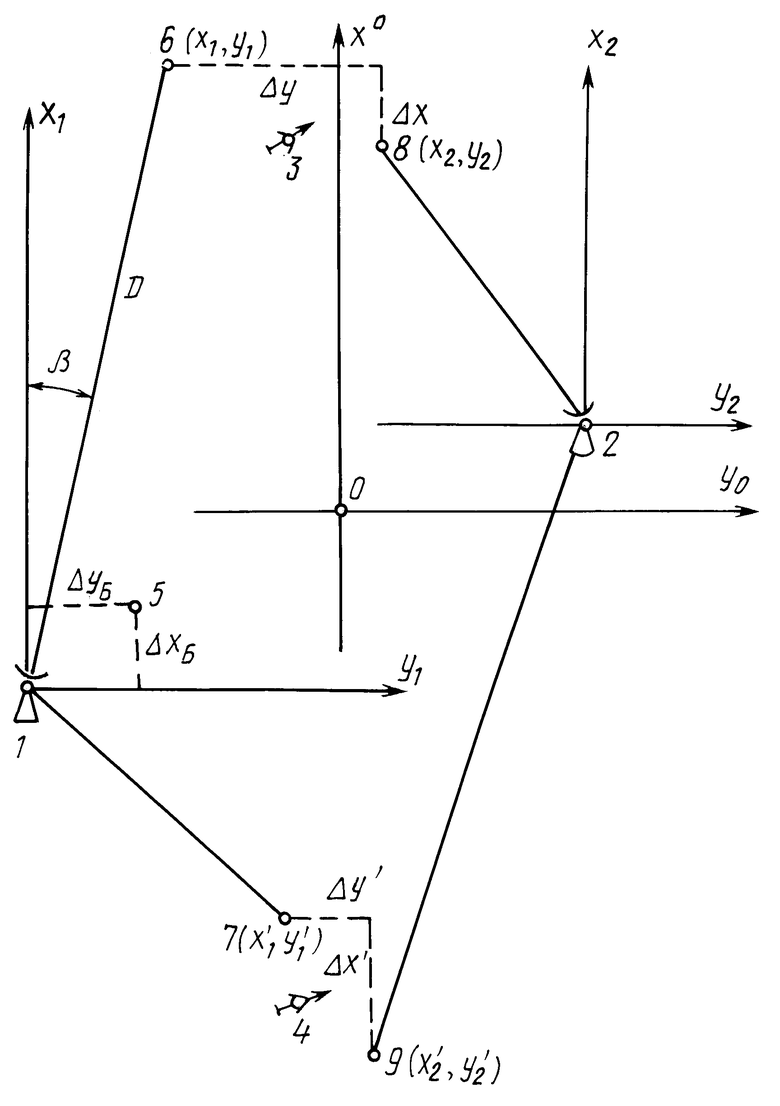
Способ юстировки радиолокационных станций (РЛС), заключающийся в том, что измеряют координаты отражающего объекта с последующим определением систематических ошибок юстировки, отличающийся тем, что вспомогательную РЛС располагают на некотором расстоянии от юстируемой РЛС в пределах ее зоны действия, измеряют обеими РЛС координаты любых двух воздушных объектов, удаленных друг от друга на расстояние не менее половины радиуса действия юстируемой РЛС, в пределах зоны обнаружения обеих РЛС, определяют расхождения координат одного из воздушных объектов ΔX, ΔY, и другого воздушного объекта ΔX′, ΔY′ и определяют величину поправок для юстируемой РЛС по азимуту согласно формуле
и по дальности согласно формуле

азимуты первого и второго воздушных объектов относительно юстируемой РЛС, после чего находят поправки по координатам дислокации юстируемой РЛС согласно формулам
а в случаях, когда ошибки в координатах дислокации отсутствуют, определяют поправки для юстируемой РЛС по азимуту и по дальности согласно формулам
Δβ = 1/D(ΔY cosβ-ΔX sinβ);
ΔD = ΔY sinβ+ΔX cosβ,
где D расстояние воздушного объекта до юстируемой РЛС.
| Теория и практика эксплуатации радиолокационных систем / Под ред | |||
| С.М.Латинского | |||
| - М.: Сов.радио, 1970, с | |||
| Приспособление, заменяющее сигнальную веревку | 1921 |
|
SU168A1 |
| Бартон Д | |||
| Радиолокационные системы | |||
| - М.: Воениздат, 1967, с | |||
| ПРИСПОСОБЛЕНИЕ, ЗАТРУДНЯЮЩЕЕ КРАЖУ ЭЛЕКТРИЧЕСКОЙ ЛАМПЫ | 1922 |
|
SU399A1 |
