УРОВЕНЬ ТЕХНИКИ
[0001] Изобретение относится к турбинным двигателям, в частности к турбинному двигателю, который содержит вентиляторное сопло с изменяемым сечением и механизм реверса тяги.
[0002] Обычно авиационный турбинный двигатель обеспечивают несколькими подвижными обтекателями, положения которых могут регулироваться посредством использования соответствующих приводов. При эксплуатации поток воздуха проходит сквозь проход между корпусом вокруг турбины (или "внутреннего контура") и выходит из двигателя через вентиляторное сопло. Этот поток воздуха, проходящий через вентиляторное сопло, предоставляет большую часть силы тяги. Некоторые турбинные двигатели содержат вентиляторное сопло с изменяемым сечением (ВСИС), которое позволяет регулировать размер сопла посредством движения обтекателей. Размеры сопла совпадают с размером выходной горловины, образованной между выходным концом обтекателя вентилятора и корпусом внутреннего контура двигателя (например, турбины). Было установлено, что относительно большие размеры сопла во время таких этапов работы двигателя, как взлет и набор высоты, и меньшие во время условий крейсерского полета являются предпочтительными. Во время снижения размеры сопла часто увеличивают в случае необходимости прерывания посадки и повторного входа в этап набора высоты.
[0003] При приземлении летательного аппарата тормозных устройств посадочных шасси и прилагаемых нагрузок аэродинамического сопротивления (например, закрылков, интерцепторов и т.п.) летательного аппарата может оказаться не достаточно для замедления летательного аппарата в пределах необходимой дистанции. Поэтому большинство двигателей летательных аппаратов также содержат механизмы реверса тяги для увеличения энергии остановки летательного аппарата. В развернутом состоянии механизмы реверса тяги перенаправляют вперед тягу двигателя, направленную назад, таким образом замедляя летательный аппарат. Система механизма реверса тяги двигателя летательного аппарата содержит обтекатели, расположенные на одной из сторон двигателя и выполненные с возможностью перемещения между убранным и развернутым рабочим положением. Каждый обтекатель направляется вдоль пары направляющих канавок и приводится в движение посредством системы привода механизма реверса тяги (СПМРТ), которая содержит линейно выдвигающийся привод. Во время развертывания приводы перемещают обтекатель из убранного положения в развернутое положение. Механизмы реверса тяги обычно используют только для реверса тяги во время посадки, и они не выполняют других дополнительных функций.
[0004] Заявки предшествующего уровня техники, затрагивающие летательные аппараты, предоставили отдельные приводы для перемещения обтекателей ВСИС и обтекателей механизма реверса тяги, при этом оба привода были расположены на конструкции летательного аппарата. Результатом предоставления независимого привода каждому набору обтекателей является очень большой такт работы привода ВСИС, что существенно повышает стоимость, напряжение и вес.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0005] В соответствии с одним вариантом реализации изобретения обеспечена система привода, которая содержит шарико-винтовой вал, первую шариковую гайку и вторую шариковую гайку, которые находятся во взаимодействии с шарико-винтовым валом. Вторая шариковая гайка прикреплена к первому выполненному с возможностью перемещения объекту. Подшипник прикреплен к шарико-винтовому валу между первой шариковой гайкой и второй шариковой гайкой. Подшипник присоединен ко второму выполненному с возможностью перемещения объекту. Приводной механизм при работе присоединен к первой шариковой гайке для вращения, а первая шариковая гайка присоединена к шарико-винтовому валу посредством стопорного механизма таким образом, что, когда стопорный механизм приведен во взаимодействие, первая шариковая гайка и шарико-винтовой вал вращаются как одна деталь.
[0006] В соответствии с другим вариантом реализации изобретения обеспечен способ приведения в действие механизма реверса тяги летательного аппарата, при этом способ содержит вывод стопорного механизма из взаимодействия. Стопорный механизм предотвращает вращение первой шариковой гайки относительно шарико-винтового вала. Затем вращают первую шариковую гайку для перемещения шарико-винтового вала относительно первой шариковой гайки, таким образом вызывая перемещение подвижного обтекателя, связанного с шарико-винтовым валом.
[0007] В соответствии с еще одним вариантом реализации изобретения обеспечен способ приведения в действие вентиляторного сопла с изменяемым сечением летательного аппарата, при этом способ содержит ввод стопорного механизма во взаимодействие, присоединяющее первую шариковую гайку к шарико-винтовому валу. Затем первую шариковую гайку и присоединенный шарико-винтовой вал вращают как одну деталь для перемещения второй шариковой гайки, взаимодействующей с шарико-винтовым валом, относительно первой шариковой гайки, таким образом вызывая перемещение подвижного обтекателя, прикрепленного ко второй шариковой гайке.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Предмет рассмотрения, классифицируемый как изобретение, подробно описан и четко сформулирован в пунктах формулы изобретения в заключительной части описания изобретения. Вышеуказанные и другие признаки, а также преимущества изобретения будут раскрыты в нижеследующем подробном описании в сочетании с сопутствующими графическими материалами, на которых:
[0009] фиг.1 - вид сбоку двигателя, который содержит обычную систему привода механизма реверса тяги (СПМРТ) и обычный привод вентиляторного сопла с изменяемым сечением (ВСИС);
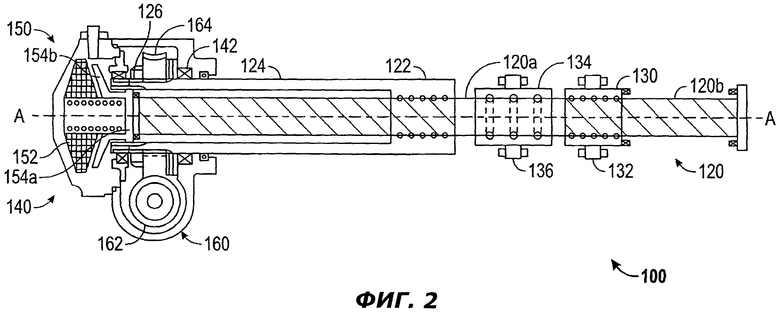
[0010] фиг.2 - вид в частичном разрезе сбоку конфигурации привода в соответствии с вариантом реализации изобретения; и
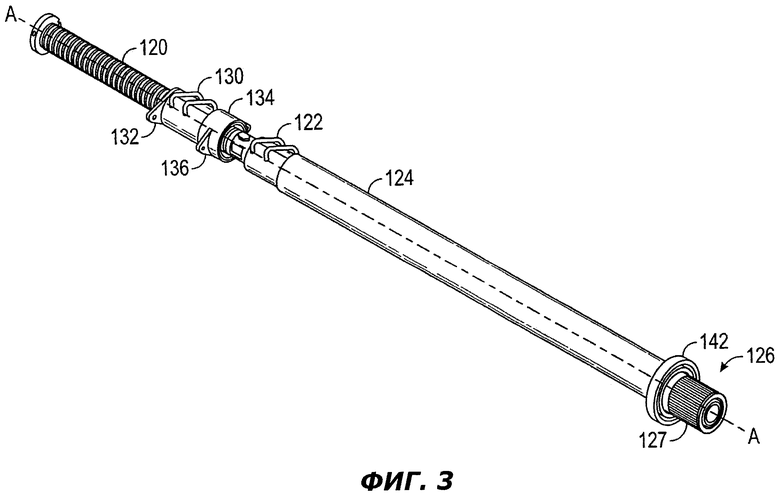
[0011] фиг.3 - перспективный вид привода по фиг.2 с убранным корпусом привода.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0012] В нижеследующем подробном описании объясняются варианты реализации изобретения, а также его преимущества и признаки со ссылкой на графические материалы.
[0013] На фиг.1 схематически изображен вид сбоку части обычного двигателя 10, который содержит подвижные обтекатели. В соответствии с изображением система привода 20 механизма реверса тяги (СПМРТ) расположена ближе к низу боковой стороны двигателя 10. СПМРТ 20 содержит гидравлический линейный привод 21, присоединенный на конце 22 к перемещаемому обтекателю 24 СПМРТ. Обтекатель 24 СПМРТ выполнен с возможностью скольжения вдоль направляющей канавки (не показано) горизонтально вдоль продольной оси двигателя. С целью упрощения на фиг.1 СПМРТ 20 изображена в развернутом или выдвинутом положении. Двигатель 10 также содержит привод 30 для системы вентиляторного сопла с изменяемым сечением (ВСИС). Привод 30 ВСИС расположен близко к противоположному концу обтекателя 24 СПМРТ от СПМРТ 20. Привод 30 ВСИС присоединен у конца 32 к перемещаемому обтекателю 34 ВСИС. Обтекатель 34 ВСИС расположен на заднем конце обтекателя 24 СПМРТ, так что в случае перемещения обтекателя 24 СПМРТ в первом направлении, обтекатель 34 ВСИС перемещается на такое же расстояние в таком же направлении. Обтекатель 34 ВСИС также выполнен подвижным независимо от обтекателя 24 СПМРТ. Эти две отдельные и независимым образом контролируемые системы привода для перемещения обтекателя 24 СПМРТ и обтекателя 34 ВСИС значительно увеличивают вес и стоимость двигателя 10.
[0014] На фиг.2 и 3 изображены встроенная конфигурация 100 привода СПМРТ и ВСИС для установки на двигатель в соответствии с вариантом реализации изобретения. Конфигурация 100 привода содержит шарико-винтовой вал 120, на котором расположены первая шариковая гайка 122 и вторая шариковая гайка 130. Шарико-винтовой вал 120, первая шариковая гайка 122 и вторая шариковая гайка 130 выполнены с возможностью вращения вокруг центральной оси А шарико-винтового вала 120. Шарико-винтовой вал 120 имеет такую длину, благодаря которой соответствующий обтекатель ВСИС (не показано) может достигать полностью развернутого положения. В одном варианте реализации изобретения шарико-винтовой вал 120 сформирован первым шарико-винтовым валом 120а, функционально соединенным со вторым шарико-винтовым валом 120b. В таком варианте реализации первая шариковая гайка 122 взаимодействует с первым шарико-винтовым валом 120а, а вторая шариковая гайка 130 взаимодействует со вторым шарико-винтовым валом 120b.
[0015] Встроенная втулка 124 прикреплена к первой шариковой гайке 122. Втулка 124 отходит от первой шариковой гайки 122 к корпусу 140 привода, чтобы участок шарико-винтового вала 120 между первой шариковой гайкой 122 и корпусом 140 привода находился внутри втулки 124. Величина внутреннего диаметра втулки 124 больше величины внешнего диаметра шарико-винтового вала 120, чтобы втулка 124 и шарико-винтовой вал 120 не вступали в контакт. Вторая шариковая гайка 130 содержит внешний выступ, или средство соединения 132, для плотного прикрепления второй шариковой гайки 130 к первому выполненному с возможностью перемещения объекту (не показано), например, такому как обтекатель ВСИС. Подшипник 134 расположен на шарико-винтовом вале 120 между первой шариковой гайкой 122 и второй шариковой гайкой 130. Внутреннее кольцо подшипника 134 прикреплено к шарико-винтовому валу 120 с возможностью закрепления для предотвращения перемещения подшипника 134 относительно шарико-винтового вала 120. Внешнее кольцо подшипника 134 выполнено с возможностью вращения по центральной оси А шарико-винтового вала 120. Внешнее кольцо подшипника 134 содержит внешний выступ, или средство соединения 136, для присоединения подшипника 134 ко второму выполненному с возможностью перемещения объекту (не показано), например, такому как обтекатель СПМРТ.
[0016] Свободный конец 126 втулки 124 поддерживается шариковой опорой 142 в корпусе 140 привода. Этот шариковый подшипник 142 предотвращает перемещение первой шариковой гайки 122 относительно корпуса 140 привода. Свободный конец 126 втулки 124 присоединен с возможностью вращения к приводному механизму 160, который содержит червячную шестерню 162 и косозубую шестерню 164. В соответствии с фиг.3 периферия внешней поверхности свободного конца 126 втулки 124 содержит шлицы 127. Шлицы 127 сопряжены с ответными шлицами, расположенными вокруг периферии внутренней поверхности косозубой шестерни 164. В альтернативном варианте реализации может быть использован шпоночный паз и шпонка, или другая конфигурация сопряжения, для передачи вращения косозубой шестерни 164 втулке 124 и первой шариковой гайке 122. Силовой привод (не показано) расположен по центру на двигателе и выполнен с возможностью приводить в движение приводы, расположенные вокруг двигателя. Гибкий приводной вал (не показано) соединяет силовой привод с механизмом 160 силового привода. Вращение гибкого приводного вала приводит в движение червячную шестерню 162, которая в свою очередь выполнена с возможностью вращать первую шариковую гайку 122. Так как свободный конец 126 втулки 124 выполнен без возможности перемещения относительно корпуса 140 привода, вращение первой шариковой гайки 122 в первом направлении обеспечивает выдвижение шарико-винтового вала 120, подшипника 134 и второй шариковой гайки 132 по направлению от первой шариковой гайки 122. Вращение первой шариковой гайки во втором, противоположном направлении обеспечивает убирание шарико-винтового вала 120, подшипника 134 и второй шариковой гайки 132 по направлению к первой шариковой гайке 122.
[0017] Встроенная система 100 привода также содержит стопорный механизм 150 для передачи вращения первой шариковой гайки 122 шарико-винтовому валу 120. Стопорный механизм 150 расположен в корпусе 140 привода и выстроен по центральной оси А. В приведенном в качестве примера варианте реализации стопорный механизм 150 содержит выполненную с возможностью перемещения стопорную втулку 154 с пружиной. Стопорная втулка 154 содержит первый цилиндрический конец 154а, участок которого выполнен с возможностью взаимодействия с внутренней поверхностью свободного конца 126 втулки 124. Конический выступ 154b отходит от участка первого цилиндрического конца 154b, который выполнен без возможности взаимодействия с втулкой 124. Соленоид 152 примыкает к стопорной втулке 154 между коническим выступом 154b и корпусом 140 привода. Первый цилиндрический конец 154а содержит шлицы, расположенные по его внешней периферии. Вокруг периферии внутренней поверхности свободного конца 126 расположено дополнительные шлицы. Шлицы на первом цилиндрическом конце 154а взаимодействуют со шлицами на свободном конце 126, для сопряжения стопорной втулки 154 с первой шариковой гайкой 122. Тормозное устройство расположено на конце шарико-винтового вала 120, ближе к корпусу 140 привода. Второе тормозное устройство присоединено к стопорной втулке 154. Тормозные устройства могут быть обычными концевыми тормозными устройствами, тормозными устройствами с переставными упорами или любым другим подобным устройством. В одном варианте реализации стопорная втулка 150 и шарико-винтовой вал 120 содержат несколько тормозных устройств.
[0018] При стопорном механизме 150 в замкнутом положении как шарико-винтовой вал 120, так и первая шариковая гайка 122 соединены со стопорной втулкой 154. Тормозное устройство на стопорной втулке 154 выполнено с возможностью сопряжения с тормозным устройством шарико-винтового вала 120 для сцепления шарико-винтового вала 120 со стопорной втулкой 154. Первая шариковая гайка 122 уже сопряжена со стопорной втулкой 154 посредством шлицев вокруг внешней периферии первого цилиндрического конца 154а и внутренней периферии свободного конца 126. При стопорном устройстве во включенном состоянии вращение первой шариковой гайки 122 приводным механизмом 160 обеспечивает вращение первой шариковой гайки 122, стопорной втулки 154 и шарико-винтового вала 120 как одной детали.
[0019] Для вывод стопорного механизма из взаимодействия на соленоид 152 подают питание. Конический выступ 154b стопорной втулки 154 выполнен с возможностью притягивания к соленоиду 152 под напряжением. При подаче напряжения на соленоид 152 стопорная втулка 154 перемещается в осевом направлении к соленоиду 152, что приводит к выходу тормозных устройств на стопорной втулке 154 из взаимодействия с тормозными устройствами на шарико-винтовом вале 120. Посредством этого отсоединения шарико-винтового вала 120 от стопорной втулки 154 обеспечивается вращение первой шариковой гайки 122 относительно шарико-винтового вала 120 для перемещения шарико-винтового вала 120 относительно первой шариковой гайки 122. При отключении напряжения от соленоида 152, посредством упругой силы пружины в стопорной втулке 154 обеспечивается перемещение стопорной втулки 154 по направлению к первой шариковой гайке 122, для повторного ввода во взаимодействие тормозных устройств стопорной втулки 154 и шарико-винтового вала 120. Описанный выше стопорный механизм 150 приведен в качестве примера и любой другой стопорный механизм с возможностью присоединения шарико-винтового вала 120 к первой шариковой гайке 122 является достаточным для использования с приводом 100.
[0020] В большинстве заявок, затрагивающих летательные аппараты, обтекатели механизма реверса тяги обычно разворачивают только при посадке летательного аппарата, так как обтекатели оказывают противодействие движению летательного аппарата вперед, вызывая снижение скорости летательного аппарата. В зависимости от этапа полета ВСИС могут быть настроены для повышения эффективности двигателя. Таким образом, подвижность обтекателя ВСИС независимо от обтекателя СПМРТ является предпочтительной. В заявках, затрагивающих летательные аппараты, при полностью убранном обтекателе СПМРТ стопорный механизм 150 привода 100 может возвращаться к включенному положению для предотвращения случайного развертывания механизмов реверса тяги. Тормозные устройства, присоединенные к стопорному механизму 150, в положении взаимодействия взаимодействуют с тормозным устройством на шарико-винтовом вале 120, таким образом соединяя первую шариковую гайку 122 с шарико-винтовым валом 120. Для развертывания обтекателей ВСИС необходимо вращение шарико-винтового вала 120. При подаче напряжения на приводной механизм 160 обеспечивается вращение червячной шестерни 162 и косозубой шестерни 164. Так как втулка 124 сопряжена с косозубой шестерней 164, первая шариковая гайка 122 и присоединенный шарико-винтовой вал 120 будут вращаться как одна деталь для обеспечения сохранения установленной дистанции от подшипника 134 и второго выполненного с возможностью перемещения объекта (не показано) к первой шариковой гайке 122. Даже при вращении шарико-винтового вала 120 шарико-винтовой вал 120 не передвигается относительно ни первой шариковой гайки 122, ни второй шариковой гайки 130. Разумеется, что в такой конфигурации вращение шарико-винтового вала 120 обеспечит выдвижение или убирание второй шариковой гайки 130 относительно первой шариковой гайки 122, и перемещение первого выполненного с возможностью перемещения объекта относительно второго выполненного с возможностью перемещения объекта. Таким образом, вращение приводного механизма 160, когда стопорное устройство находится во взаимодействии, обеспечивает развертывание второго выполненного с возможностью перемещения объекта, такого как обтекатель ВСИС, например, независимо от первого выполненного с возможностью перемещения объекта, например, такого как обтекатель СПМРТ.
[0021] Для развертывания обтекателей СПМРТ стопорный механизм 150 должен быть выведен из взаимодействия. Посредством подачи питания на соленоид 152 стопорного механизма 150 стопорную втулку 154 перемещают в осевом направлении от шарико-винтового вала 120, обеспечивая выход сопряженных тормозных устройств стопорной втулки из взаимодействия с шарико-винтовым валом 120. Это разделение обеспечивает открепление шарико-винтового вала 120 от стопорной втулки 154, таким образом предоставляя стопорной втулке 154, соединенной с первой шариковой гайкой 122, выполненной с возможностью вращения, возможность независимого от шарико-винтового вала 120 вращения. Подача напряжения от силового привода обеспечивает вращение червячной шестерни 162 в приводном механизме 160. В свою очередь, червячная шестерня 162 обеспечивает вращение косозубой шестерни 164, сопряженной с первой шариковой гайкой 122 посредством шлицев. Так как шарико-винтовой вал 120 более не присоединен к первой шариковой гайке 122, вращение первой шариковой гайки 122 обеспечивает перемещение шарико-винтового вала 120 относительно первой шариковой гайки 122. Разумеется, что в такой конфигурации перемещение шарико-винтового вала 120 обеспечивает перемещение второй шариковой гайки 130, прикрепленной к первому выполненному с возможностью перемещения объекту, и подшипника 134, присоединенного ко второму выполненному с возможностью перемещения объекту, относительно первой шариковой гайки 122. Однако, при стопорном механизме 150 в невзаимодействующем состоянии, вращение первой шариковой гайки 122 не обеспечивает перемещения второй шариковой гайки 130 и подшипника 134 относительно друг друга.
[0022] Хотя изобретение было подробно описано по отношению к ограниченному количеству вариантов реализации, следует понимать, что изобретение не ограничивается этими раскрытыми вариантами реализации. Наоборот, изобретение может быть модифицировано задействованием любого количества изменений, альтернатив, замен или эквивалентных конфигураций, не описанных здесь, но соответствующих сущности и объему изобретения. Также, в то время как были описаны различные варианты реализации изобретения, следует понимать, что аспекты изобретения могут включать только некоторые из описанных вариантов реализации. Соответственно, в приведенном выше описании не следует видеть ограничения изобретения, которое ограничивается лишь объемом прилагаемых пунктов формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЧЕСКИЙ СТОПОР ДЛЯ РЕВЕРСЕРА ТЯГИ РЕАКТИВНОГО ДВИГАТЕЛЯ | 1993 |
|
RU2120559C1 |
| СИСТЕМА НИЖНЕГО КРЕПЛЕНИЯ ДЛЯ ПРИВОДА УПРАВЛЯЕМОГО ГОРИЗОНТАЛЬНОГО СТАБИЛИЗАТОРА | 2018 |
|
RU2758840C2 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1999 |
|
RU2154593C1 |
| ПРИВОД ДВИГАТЕЛЬНЫЙ МАЛОГАБАРИТНЫЙ | 2017 |
|
RU2675288C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2004 |
|
RU2363621C2 |
| ВРАЩАЮЩИЕСЯ В ПРОТИВОПОЛОЖНЫХ НАПРАВЛЕНИЯХ ДВИГАТЕЛИ С ЛИНЕЙНЫМ ВЫХОДОМ | 2009 |
|
RU2471646C2 |
| РУЛЕВОЙ ПРИВОД | 2010 |
|
RU2444463C1 |
| ПРИВОД, ОСНАЩЕННЫЙ СИСТЕМОЙ NO BACK С ЗОНОЙ БЛОКИРОВКИ | 2018 |
|
RU2719066C1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| ПРИВОД С ПАССИВНОЙ БЛОКИРОВКОЙ | 2017 |
|
RU2714658C1 |
Система привода содержит шарико-винтовой вал, взаимодействующие с ним первую и вторую шариковые гайки, подшипник, а также приводной и стопорный механизмы. Вторая шариковая гайка прикреплена к первому выполненному с возможностью перемещения объекту. Подшипник прикреплен к шарико-винтовому валу между первой и второй шариковыми гайками и присоединен ко второму выполненному с возможностью перемещения объекту. Приводной механизм присоединен к первой шариковой гайке и выполнен с возможностью обеспечения ее вращения. Стопорный механизм выполнен с возможностью избирательно присоединять шарико-винтовой вал к первой шариковой гайке. При приведении в действие механизма реверса тяги выводят стопорный механизм из взаимодействия, предотвращающего вращение первой шариковой гайки относительно шарико-винтового вала. Затем вращают первую шариковую гайку, обеспечивая перемещение шарико-винтового вала относительно первой шариковой гайки, вызывая перемещение подвижного обтекателя, связанного с шарико-винтовым валом. При приведении в действие вентиляторного сопла с изменяемым сечением вводят стопорный механизм во взаимодействие, присоединяющее первую шариковую гайку к шарико-винтовому валу. Затем вращают первую шариковую гайку вместе с шарико-винтовым валом, обеспечивая перемещение второй шариковой гайки относительно первой шариковой гайки, вызывая перемещение подвижного обтекателя, прикрепленного ко второй шариковой гайке. Группа изобретений позволяет снизить вес двигателя за счет обеспечения возможности привода независимых обтекателей одной системой привода. 3 н. и 10 з.п. ф-лы, 3 ил.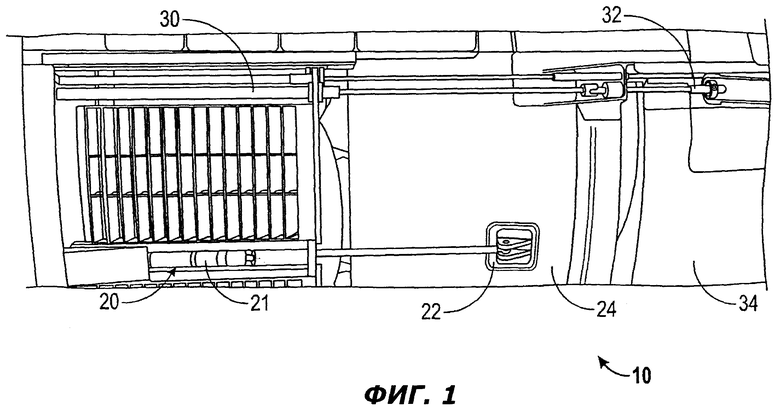
1. Система привода, содержащая:
шарико-винтовой вал;
первую шариковую гайку, взаимодействующую с шарико-винтовым валом;
вторую шариковую гайку, взаимодействующую с шарико-винтовым валом и прикрепленную к первому выполненному с возможностью перемещения объекту;
подшипник, прикрепленный к шарико-винтовому валу между первой шариковой гайкой и второй шариковой гайкой и присоединенный ко второму выполненному с возможностью перемещения объекту;
приводной механизм, при работе присоединенный к первой шариковой гайке, обеспечивающий вращение первой шариковой гайки; и
стопорный механизм, избирательно присоединяющий шарико-винтовой вал к первой шариковой гайке.
2. Система привода по п.1, отличающаяся тем, что первый выполненный с возможностью перемещения объект является обтекателем вентиляторного сопла с изменяемым сечением.
3. Система привода по п.1, отличающаяся тем, что второй выполненный с возможностью перемещения объект является обтекателем механизма реверса тяги.
4. Система привода по п.1, отличающаяся тем, что при присоединении стопорным механизмом шарико-винтового вала к первой шариковой гайке, первая шариковая гайка выполнена с возможностью вращения в унисон с шарико-винтовым валом, вызывая перемещение второй шариковой гайки относительно первой шариковой гайки.
5. Система привода по п.1, отличающаяся тем, что при неприсоединении стопорным механизмом шарико-винтового вала к первой шариковой гайке, первая шариковая гайка выполнена с возможностью вращения относительно шарико-винтового вала таким образом, что шарико-винтовой вал перемещается относительно первой шариковой гайки.
6. Система привода по п.1, отличающаяся тем, что шарико-винтовой вал содержит первый шарико-винтовой вал, присоединенный ко второму шарико-винтовому валу.
7. Система привода по п.1, отличающаяся тем, что первая шариковая гайка выполнена без возможности перемещения относительно корпуса системы привода.
8. Система привода по п.7, отличающаяся тем, что внешняя периферия свободного конца первой шариковой гайки содержит шлицы для сопряжения с приводным механизмом.
9. Способ приведения в действие механизма реверса тяги двигателя летательного аппарата, включающий:
вывод стопорного механизма из взаимодействия, который предотвращает вращение первой шариковой гайки относительно шарико-винтового вала; и
вращение первой шариковой гайки таким образом, что шарико-винтовой вал перемещается относительно первой шариковой гайки, вызывая в результате перемещение подвижного обтекателя, связанного с шарико-винтовым валом.
10. Способ приведения в действие механизма реверса тяги по п.9, отличающийся тем, что подвижный обтекатель является обтекателем механизма реверса тяги.
11. Способ приведения в действие механизма реверса тяги по п.9, отличающийся тем, что стопорный механизм содержит соленоид, на который подают питание для вывода стопорного механизма из взаимодействия.
12. Способ приведения в действие вентиляторного сопла с изменяемым сечением двигателя летательного аппарата, включающий:
ввод стопорного механизма во взаимодействие, присоединяющее первую шариковую гайку к шарико-винтовому валу; и
вращение первой шариковой гайки и вследствие этого шарико-винтового вала таким образом, что вторая шариковая гайка, взаимодействующая с шарико-винтовым валом, перемещается относительно первой шариковой гайки, вызывая таким образом перемещение подвижного обтекателя, прикрепленного ко второй шариковой гайке.
13. Способ приведения в действие вентиляторного сопла с изменяемым сечением по п.12, отличающийся тем, что подвижный обтекатель является обтекателем вентиляторного сопла с изменяемым сечением.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРИВЯЗКИ ОБЪЕКТОВ | 2008 |
|
RU2446441C2 |
| US 3404581 A, 08.10.1968 | |||
| US 5313852 A, 24.05.1994 | |||
| РЕВЕРСИВНОЕ УСТРОЙСТВО НАРУЖНОГО КОНТУРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2001 |
|
RU2215168C2 |

