Изобретение относится к области коммутационных сред для вычислительных систем. Используется как составная часть высокоскоростного последовательного мультиканального приемопередатчика.
Известен приемник с гибридным эквалайзером, включающий детектор входного сигнала с генератором опорного напряжения, демультиплексор, монитор входного сигнала, монитор глазковой диаграммы, блок восстановления синхронизации и фазовращатель (Hidaka Y., Horie Т., Koyanagi Y. A 4-channel 10.3 Gb/s transceiver with adaptive phase equalizer for 4-to-41dB loss PCB channel. // in Proc. IEEE International Solid - State Circuits Conf., pp. 346-348, 2011).
Недостатком описанного приемника является недостаточно широкий диапазон регулировки глубины компенсации, по причине зависимости размаха дифференциального напряжения обрабатываемого сигнала, от размаха дифференциального напряжения входного сигнала и от текущего значения глубины компенсации межсимвольной интерференции. Также недостатком описанного приемника является узкий диапазон по размаху дифференциального напряжения входного сигнала, который ограничен рабочей областью.
Задачей данного изобретения является обеспечение работы устройства для передачи высокочастотного потока данных по каналу с большим коэффициентом затухания.
Указанная задача решается за счет того, что приемник с гибридным эквалайзером, включающий детектор входного сигнала с генератором опорного напряжения, демультиплексор, монитор входного сигнала, монитор глазковой диаграммы, блок восстановления синхронизации и фазовращатель, согласно изобретению имеет линейный эквалайзер и рекурсивный эквалайзер и снабжен регулятором усиления, при этом гибридный эквалайзер связан с детектором входного сигнала, демультиплексором, монитором входного сигнал и монитором глазковой диаграммы, а регулятор усиления связан с монитором входного сигнала для образования следящей обратной связи, причем генератор опорного напряжения связан с монитором глазковой диаграммы для оптимизации точки сходимости в образованной следящей обратной связи.
Технический результат от использования данного изобретения состоит в увеличении диапазона по регулировки глубины компенсации эквалайзера и увеличении диапазона по размаху дифференциального напряжения входного сигнала, путем обеспечения возможности передачи высокочастотного потока данных по каналу с большим коэффициентом затухания.
Изобретение поясняется чертежами, где на фиг.1 изображена структурная схема приемника, на фиг.2 изображены импульсные и амплитудно-частотные характеристики приемника.
Приемник состоит из детектора входного сигнала (ДЕТВС) 1, фазовращателя (ФВ) 2, монитора входного сигнала (МВС) 3, гибридного эквалайзера (ГЭ) 4, демультиплексора (ДМ) 5, монитора глазковой диаграммы (МГД) 6, блока восстановления синхронизации (БВС) 7. Монитор входного сигнала 3 состоит из генератора опорного напряжения (ГОН) 8, компаратора напряжения (КН) 9, декодера регулировки усиления (ДРУ) 10. Гибридный эквалайзер 4 состоит из регулятора усиления (РУ) 11, линейного эквалайзера (ЛЭ) 12, рекурсивного эквалайзера (РЭ) 13. Демультиплексор 5 состоит из демультиплексора данных (ДМД) 14, демультиплексора ошибки (ДМО) 15. Монитор глазковой диаграммы 6 состоит из детектора межсимвольной интерференции (ДМСИ) 16, мажоритарной схемы сбора информации (МССИ) 17, интегрально-пропорционального фильтра (ИПФ) 18, декодера линейного эквалайзера (ДЛЭ) 19, декодера рекурсивного эквалайзера (ДРЭ) 20. Блок восстановления синхронизации 7 состоит из фазового детектора (ФД) 21, мажоритарной схемы сбора информации (МССИ) 22, интегрально-пропорционального фильтра (ИПФ) 23, декодера фазовращателя (ДФВ) 24.
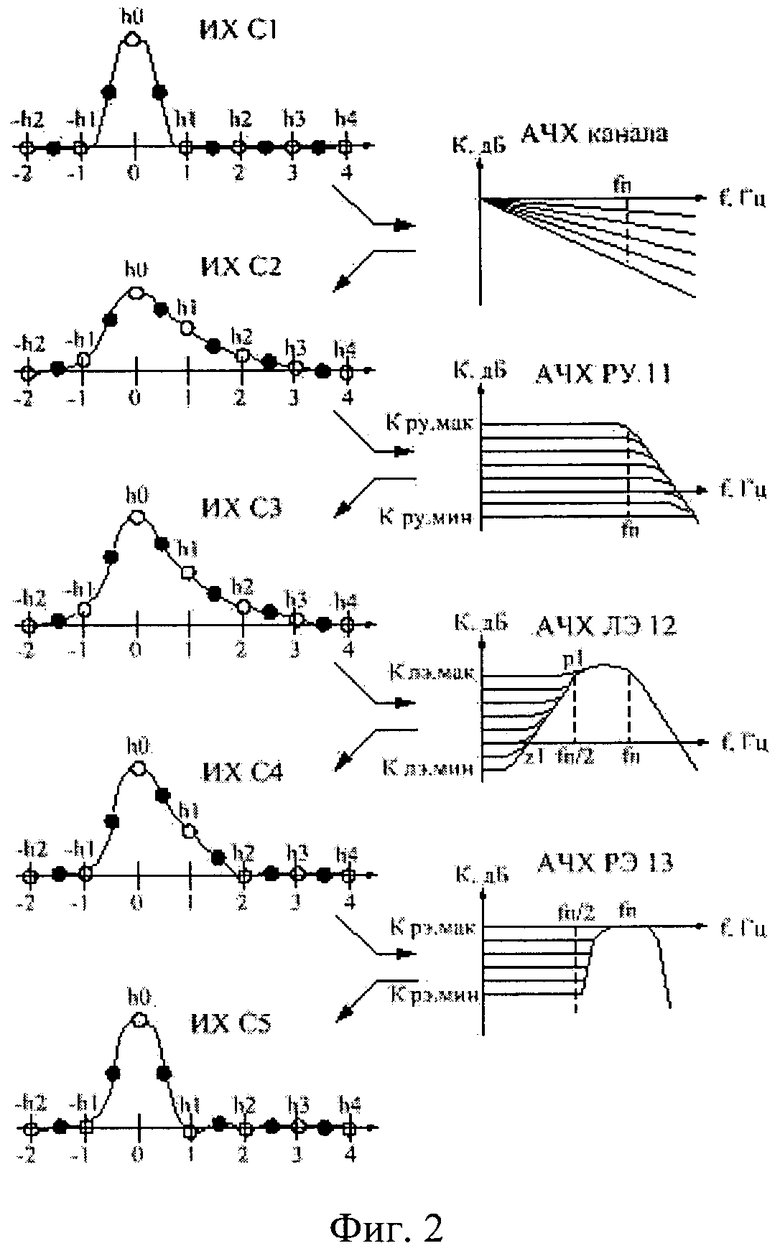
Импульсные характеристики устройства, изображенные на фиг.2, представляют: ИХ С1 - импульсная характеристика на входе в канал передачи данных, ИХ С2 - импульсная характеристика на выходе канала передачи данных, ИХ С3 - импульсная характеристика на выходе регулятора усиления (РУ) 11, ИХ С4 - импульсная характеристика на выходе линейного эквалайзера 12 (ЛЭ), ИХ С5 - импульсная характеристика на одном из внутренних каскадов рекурсивного эквалайзера 13 (РЭ), АЧХ - амплитудно-частотная характеристика канала передачи данных, АЧХ РУ 11 - амплитудно-частотная характеристика регулятора усиления 11, АЧХ ЛЭ 12 - амплитудно-частотная характеристика линейного эквалайзера 12, АЧХ РЭ 13 - амплитудно-частотная характеристика рекурсивного эквалайзера 13.
Система работает следующим образом. На вход канала подается идеальный поток данных, имея импульсную характеристику ИХ С1. Все коэффициенты импульсной характеристики за исключением h0 равны нулю. Проходя через канал, сигнал затухает. В зависимости от качества и длинны канала величина затухания на одной и той же частоте может быть различна, что демонстрирует семейство амплитудно-частотная характеристика (АЧХ) канала. Более того, ослабление имеет частотно-зависимый характер, что приводит к возникновению межсимвольной интерференции (МСИ), как показано на импульсной характеристике ИХ С2. Сигнал из канала поступает на вход детектора входного сигнала (ДЕТВС) 1 и регулятора усиления (РУ) 11. Если максимальное дифференциальное напряжение входного сигнала больше, чем внутреннее дифференциальное напряжение детектора входного сигнала (ДЕТВС) 1, формируется сигнал разрешения, активизируя гибридный эквалайзер (ГЭ) 4. В противном случае система продолжает находиться в пассивном состоянии.
После того как произошло детектирование входного сигнала, необходимо отрегулировать размах дифференциального сигнала на выходе регулятора усиления (РУ) 11, приведя его к оптимальному значению для обработки в линейном эквалайзере (ЛЭ) 12 и рекурсивном эквалайзере (РЭ) 13. Для этой цели используется блок монитора входного сигнала (МВС) 3, представляющий собой следящую обратную связь, задача которой формировать управляющие коды для регулятора усиления (РУ) 11 в зависимости от разности двух дифференциальных напряжений на входе компаратора напряжения (КН) 9. В момент активации монитора входного сигнала (МВС) 3, его начальное состояние имеет случайный характер, что соответствует произвольному коэффициенту передачи регулятора усиления (РУ) 11. Компаратор напряжения (КН) 9 сравнивает опорное дифференциальное напряжение, сформированное генератором опорного напряжения (ГОН) 8, с текущим максимальным дифференциальным напряжением на выходе регулятора усиления (РУ) 11, вырабатывая корректирующий сигнал, призванный уравнять эти напряжения. Корректирующий сигнал на выходе компаратора напряжения (КН) 9 - это однобитный сигнал, полярность которого определяет знак разности напряжений на входах данного блока. Декодер регулировки усиления (ДРУ) 10 аккумулирует входной корректирующий сигнал и вырабатывает цифровой код, понятный для регулятора усиления (РУ) 11.
Обратим внимание, что полоса пропускания амплитудно-частотной характеристики регулятора усиления 11 (АЧХ РУ 11) должна быть не меньше чем частота Найквиста fn обрабатываемого потока данных, что позволит изменить все коэффициенты импульсной характеристики ИХ С3 пропорционально коэффициенту передачи регулятора усиления (РУ) 11.
С выхода регулятора усиления (РУ) 11 сигнал поступает на вход линейного эквалайзера (ЛЭ) 12, задача которого минимизировать частотно-зависимый характер сигнала в диапазоне от 0 до fn/2. Максимальная частота полосы пропускания амплитудно-частотной характеристики (АЧХ) линейного эквалайзера (ЛЭ) 12 определяется нагрузочной емкостью и предельными частотными характеристиками схемы, ограничивая по частоте предельно-допустимый входной сигнал, и должна быть не меньше чем частота Найквиста fn обрабатываемого потока данных. Активная частотная область линейного эквалайзера (ЛЭ) 12 определяется полюсом Ρ1. Значение Ρ1 приблизительно должно соответствовать fN/2, и в процессе работы фиксировано. Значение z1 регулируется цифровым кодом, поступающим из декодера линейного эквалайзера (ДЛЭ) 19 в зависимости от величины межсимвольной интерференции (МСИ) сигнала. В отсутствии межсимвольной интерференции (МСИ) ноль z1 практически совпадает с полюсом Ρ1 и коэффициент передачи линейного эквалайзера (ЛЭ) 12 во всем частотном диапазоне соответствует Клэмак. По мере увеличения межсимвольной интерференции (МСИ) ноль z1 начинает смещаться в низкочастотную область, уменьшая коэффициент передачи на низких частотах. Глубина компенсации межсимвольной интерференции (МСИ) линейного эквалайзера (ЛЭ) 12 соответствует диапазону (Клэмин÷Клэмак). Импульсная характеристика ИХ С4 на выходе линейного эквалайзера (ЛЭ) 12 показывает, что все коэффициенты за исключением h1 вернулись на свои исходные позиции.
С выхода линейного эквалайзера (ЛЭ) 12 сигнал поступает на вход рекурсивного эквалайзера (РЭ) 13, задача которого минимизировать частотно-зависимый характер сигнала на частоте fn. Максимальная полоса пропускания амплитудно-частотной характеристики (АЧХ) рекурсивного эквалайзера (РЭ) 13 определяется предельными частотными характеристиками схемы. Частоты меньше fn/2 попадают в полосу заграждения, частоты выше fn/2 находятся в полосе пропускания. Коэффициент затухания в полосе заграждения регулируется цифровым кодом, поступающим из декодера рекурсивного эквалайзера (ДРЭ) 20 в зависимости от величины межсимвольной интерференции (МСИ) сигнала. В отсутствии межсимвольной интерференции (МСИ) коэффициент передачи во всем частотном диапазоне соответствует Крэмак. По мере увеличения межсимвольной интерференции (МСИ) коэффициент передачи в полосе заграждения уменьшается, тем самым, увеличивая текущую глубину компенсации рекурсивного эквалайзера (РЭ) 13. Глубина компенсации межсимвольной интерференции (МСИ) рекурсивного эквалайзера (РЭ) 13 соответствует диапазону (Крэмин÷Крэмак). Таким образом сигнал восстановлен, и ИХ С5 на одном из внутренних каскадов рекурсивного эквалайзера (РЭ) 13 соответствует импульсной характеристике (ИХ) С1 на входе канала.
Обратим внимание, что суммарная глубина компенсации гибридного эквалайзера (ГЭ) 4 соответствует сумме глубин компенсации линейного эквалайзера (ЛЭ) 12 и рекурсивного эквалайзера (РЭ) 13.
Выходы гибридного эквалайзера (ГЭ) 4 представляют собой два потока, тактируемых синхросигналом из фазовращателя (ФВ) 2. Оба потока поступают на вход демультиплексора (ДМ) 5. Высокочастотный поток данных подается на вход демультиплексора данных (ДМД) 14, который демультиплексирует его в низкочастотную параллельную шину данных. Высокочастотный поток ошибки подается на вход демультиплексора ошибки (ДМО) 15, который демультиплексирует его в низкочастотную параллельную шину ошибки. Данная операция дает возможность реализовать монитор глазковой диаграммы (МГД) 6 и блок восстановления синхронизации (БВС) 7 в низкочастотном цифровом домене.
С выхода демультиплексора (ДМ) 5 информация о данных и ошибки поступает в монитор глазковой диаграммы (МГД) 6 и блок восстановления синхронизации (БВС) 7. Монитор глазковой диаграммы (МГД) 6 представляет собой следящую обратную связь, задача которой формировать управляющие коды для гибридного эквалайзера (ГЭ) 4 и монитора входного сигнала (МВС) 3 в зависимости от величины межсимвольной интерференции (МСИ). Детектор межсимвольной интерференции (ДМСИ) 16 детектирует признак отсутствия или присутствия межсимвольной интерференции (МСИ), используя информацию с выхода демультиплексора (ДМ) 5. Формирование признака для каждого бита мультибитной входной шины осуществляется в параллель. Мажоритарная схема сбора информации (МССИ) 17 суммирует полученную информацию, выдавая на каждый такт синхросигнала, однобитный сигнал, информирующий об отсутствии или присутствии межсимвольной интерференции (МСИ). Интегрально-пропорциональный фильтр (ИПФ) 18 интегрирует входную информацию, по мере необходимости пошагово изменяя данные, записанные в декодере регулятора усиления (ДРУ) 10, декодере линейного эквалайзера (ДЛЭ) 19 и декодере рекурсивного эквалайзера (ДРЭ) 20. Блок интегрально-пропорционального фильтра (ИПФ) 18 необходим для контроля полосы пропускания монитора глазковой диаграммы (МГД) 6, обеспечивая устойчивость следящей обратной связи. Выходная информация декодера линейного эквалайзера (ДЛЭ) 19 и декодера рекурсивного эквалайзера (ДРЭ) 20 представлена в виде термометр кода, исключая дребезг при переключении линейного эквалайзера (ЛЭ) 12 и рекурсивного эквалайзера (РЭ) 13, соответственно. Обратим внимание, что опорное напряжение на выходе генератора опорного напряжения (ГОН) 8 меняется в зависимости от величины межсимвольной интерференции (МСИ), изменяя коэффициент передачи регулятора усиления (РУ) 11 и удерживая линейный эквалайзер (ЛЭ) 12 и рекурсивный эквалайзер (РЭ) 13 в оптимальной рабочей области.
Блок восстановления синхронизации (БВС) 7 представляет собой следящую обратную связь, задача которой формировать управляющие коды для фазовращателя (ФВ) 2 в зависимости от разницы фаз высокочастотного синхросигнала и высокочастотного потока данных. Фазовый детектор (ФД) 21 детектирует признак опережения или отставания синхросигнала по отношению к потоку данных, используя информацию с выхода демультиплексора (ДМ) 5. Формирование признака для каждого бита мульти-битной входной шины осуществляется в параллель. Мажоритарная схема сбора информации (МССИ) 22 суммирует полученную информацию, выдавая на каждый такт синхросигнала, однобитный сигнал, информирующий об опережении или отставании синхросигнала. Интегрально-пропорциональный фильтр (ИПФ) 23 интегрирует входную информацию, по мере необходимости пошагово изменяя данные, записанные в декодере фазовращателя (ДФВ) 24. Блок ИПФ 23 необходим для контроля полосы пропускания БВС 7, обеспечивая устойчивость следящей обратной связи. Выходная информация интегрально-пропорциональный фильтр (ДФВ) 24 представлена в виде термометр кода, исключая дребезг при переключении фазовращателя (ФВ) 2.
Задача фазовращателя (ФВ) 2 изменять фазу выходного высокочастотного квадратурного тактового сигнала, используя входной высокочастотный опорный квадратурный тактовый сигнал, поступающий из фазовой автоподстройки частоты (ФАПЧ), в зависимости от управляющего цифрового кода из блока восстановления синхронизации (БВС) 7.
Таким образом, предложенное изобретение позволяет нивелировать зависимость размаха дифференциального напряжения обрабатываемого гибридным эквалайзером сигнала от размаха дифференциального напряжения входного сигнала и текущего значения глубины компенсации межсимвольной интерференции, увеличивая диапазон регулировки глубины компенсации и диапазон размаха дифференциального напряжения входного сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕДАТЧИК СО СЛЕДЯЩЕЙ ОБРАТНОЙ СВЯЗЬЮ | 2013 |
|
RU2558609C2 |
| СПОСОБ ПЕРЕДАЧИ ДИСКРЕТНЫХ СООБЩЕНИЙ | 2003 |
|
RU2265277C2 |
| Способ борьбы с межсимвольными искажениями цифровых сигналов | 2018 |
|
RU2692429C1 |
| УСТРОЙСТВО ОЦЕНКИ И КОРРЕКЦИИ ПАРАМЕТРОВ КАНАЛА ДЛЯ ПРИЕМА COFDM-СИГНАЛОВ | 2008 |
|
RU2407198C2 |
| РАДИОМОДЕМ | 2024 |
|
RU2830959C1 |
| ПОСЛЕДОВАТЕЛЬНЫЙ МОДЕМ С КОМБИНИРОВАННОЙ ОБРАТНОЙ СВЯЗЬЮ | 2009 |
|
RU2405274C1 |
| СПОСОБ ИТЕРАТИВНОЙ ОБРАБОТКИ СИГНАЛА ДЛЯ ПОСЛЕДОВАТЕЛЬНОГО МОДЕМА И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ (ВАРИАНТЫ) | 2008 |
|
RU2369032C1 |
| ПРИЕМНИК ЦИФРОВЫХ СИГНАЛОВ | 2010 |
|
RU2423794C1 |
| Адаптивный корректор межсимвольной интерференции | 1987 |
|
SU1540009A1 |
| Цифровое устройство приема сигналов | 1986 |
|
SU1392629A1 |
Изобретение относится к области вычислительных систем, может использоваться в приемопередатчиках. Достигаемый технический результат- обеспечение возможности передачи высокочастотного потока данных по каналу с большим коэффициентом затухания. Приемник с гибридным эквалайзером включает детектор входного сигнала с генератором опорного напряжения, демультиплексор, монитор входного сигнала, монитор глазковой диаграммы, блок восстановления синхронизации, фазовращатель, линейный эквалайзер и рекурсивный эквалайзер, регулятор усиления, при этом гибридный эквалайзер связан с детектором входного сигнала, демультиплексором, монитором входного сигнал и монитором глазковой диаграммы, а регулятор усиления связан с монитором входного сигнала для образования следящей обратной связи, причем генератор опорного напряжения связан с монитором глазковой диаграммы для оптимизации точки сходимости в образованной следящей обратной связи. 2 илл.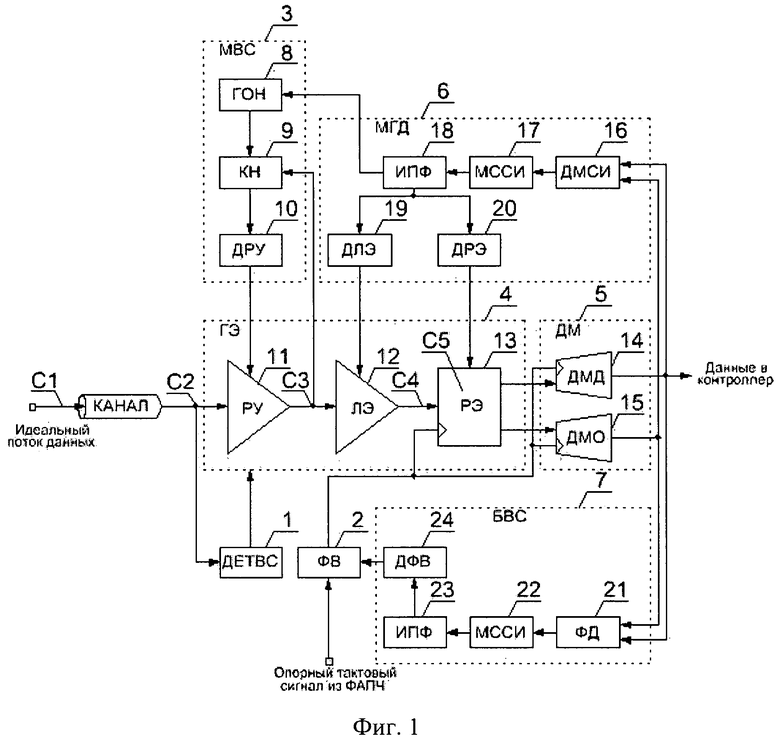
Приемник с гибридным эквалайзером, включающий детектор входного сигнала с генератором опорного напряжения, демультиплексор, монитор входного сигнала, монитор глазковой диаграммы, блок восстановления синхронизации и фазовращатель, отличается тем, что гибридный эквалайзер имеет линейный эквалайзер и рекурсивный эквалайзер и снабжен регулятором усиления, при этом гибридный эквалайзер связан с детектором входного сигнала, демультиплексором, монитором входного сигнал и монитором глазковой диаграммы, а регулятор усиления связан с монитором входного сигнала для образования следящей обратной связи, причем генератор опорного напряжения связан с монитором глазковой диаграммы для оптимизации точки сходимости в образованной следящей обратной связи.
| СВЯЗНОЙ ПРИЕМНИК С АДАПТИВНЫМ ЭКВАЛАЙЗЕРОМ, КОТОРЫЙ ИСПОЛЬЗУЕТ КАНАЛЬНУЮ ОЦЕНКУ | 2004 |
|
RU2345496C2 |
| ПОСЛЕДОВАТЕЛЬНЫЙ МОДЕМ С КОМБИНИРОВАННОЙ ОБРАТНОЙ СВЯЗЬЮ | 2009 |
|
RU2405274C1 |
| RU 2008140860 A, 20.04.2010 | |||
| US 6175588 B1, 16.01.2001 | |||

