Настоящее изобретение относится к способам и устройствам для считывания физических характеристик объекта.
В частности, задача данного изобретения заключаются в решении проблем контрафакта и серого рынка, и в общем проблемы идентификации и/или распознавания любого объекта, в частности, изделия, документа, например, идентификационного документа, упаковки или банкнот. В частности, данное изобретение предусматривает систему, облегчающую регистрацию однотипных выходных данных объекта в процессе его изготовления и облегчения извлечения этих данных в ходе его идентификации и контроля подлинности.
Изделия из волокон (бумага, картон) из большинства металлов, пластиков, бумаг с покрытием, или другие объекты имеют на микроскопическом уровне в действительности хаотичную структуру. Точно таким же образом, как биометрические технологии, использующие уникальность рисунков отпечатков пальцев или радужной оболочки глаза, были разработаны в целях идентификации или удостоверения личности человека, можно разработать способы для измерения уникальных микроскопических характеристик, присущих объектам, чтобы таким образом идентифицировать или распознавать их.
В настоящее время не известен физический процесс, который сможет повторить конкретную хаотичную структуру. Кроме того, было показано, что макроскопические деформации, такие как сминание бумаги или распыление воды на объект, серьезно не изменяют указанные микроскопические свойства. Таким образом, большинство объектов в действительности обладают характеристиками, которые позволяют им быть охарактеризованными уникальным образом, не повторяемым и практически не подверженным влиянию времени и старения.
В процессе работы объект может быть идентифицирован путем снятия его характеристик и поиску по базе данных объекта, обладающего характеристиками, наиболее близкими к характеристикам искомого объекта. Если идентификация не осуществлена, объект рассматривается как неизвестный (или «незаконный», если законными объектами считаются только те, которые присутствуют в базе данных). Следует отметить, что при накоплении в базе данных большого количества объектов поиск может потребовать больших затрат, и поэтому он должен быть оптимизирован. В отличие от вышеприведенного случая, если характеристики объекта, снимаемые во время регистрации, связаны с ним напрямую, например, как штрихкод, нанесенный на объект, его распознавание может быть проведено без обращения к базе данных.
Документ US 6584214 описывает, как объемная структура материала может быть измерена и оцифрована в целях распознавания и идентификации. Патентная заявка WO 2006016114 (Ingenia Technology) описывает технологию, называемую LSA, или «Лазерное поверхностное распознавание»: луч лазера направляется на поверхность, с которой должны быть сняты данные, а датчики фиксируют поток отраженного света лазерного луча, идущего в различных направлениях, в зависимости от ориентации ограниченной микроскопической поверхности. Таким образом, величина этого сигнала, зависящая от внутренних свойств материала, является его уникальной характеристикой. Вероятность того, что две поверхности имеют одинаковые выходные данные, пренебрежимо мала. Отметим, что во время процесса регистрации, который, как правило, выполняется автоматически по экономическим соображениям, объекты перемещают перед лазером на высокоскоростном конвейере. Так как только часть поверхности объекта может быть обработана, обязательно та же самая часть объекта должна быть охвачена в течение последующего процесса идентификации или контроля подлинности. Отметим, что процесс получения выходных данных очень чувствителен к проблемам позиционирования; ошибка позиционирования всего на 1 мм может полностью исказить считывание.
Эти технологии обладают недостатками. Обычно их реализация очень дорогостоящая и ненадежная. Следовательно, эти технологии трудны в применении. Кроме того, они весьма усложняют фазу регистрации данных. Например, в случае упаковки объекта он должен быть отправлен в центр регистрации, обычно предоставляемый фирмой-поставщиком технологии. Сложность и стоимость этого этапа является, таким образом, главным препятствием для использования данной технологии.
Технология распознавания наиболее применима, если она может применяться большим количеством пользователей (торговыми инспекторами, дистрибьюторами, сотрудниками полиции или даже конечными покупателями), чтобы заметить подделку товара в любое время. Однако использование технология ограничивается стоимостью (и, следовательно, недостатком средств), размером и весом считывающих устройств, делающими считывание «на месте» трудным и даже невозможным.
Обычно обрабатывается только небольшая часть поверхности объекта. Если область, используемая для получения выходных данных, не обозначена, только человек, знающий ее точное положение, сможет извлечь идентификационные данные. Однаков случае охраны торговой марки положения обработанных поверхностей должны быть известны для очень большого числа товаров; это невозможно даже для инспектора или сотрудника таможни, специально обученных для этих целей.
Кроме того, эти технологии имеют очень малый допуск погрешности позиционирования: сдвиг на один миллиметр или поворот на один градус могут быть достаточны для того, чтобы снятые характеристики объекта не соответствовали характеристикам, полученным во время регистрации. Следовательно, считывание - это очень деликатная процедура, которая преимущественно должна выполняться в лаборатории.
Следовательно, эти технологии весьма ограничены для криминалистического применения, что значительно снижает их ценность.
Патентная заявка WO 2007/028799 описывает способ идентификации объектов путем получения цифрового изображения микроструктуры их поверхностей. Изобретение использует систему получения стандартного изображения для получения уникального описания объекта, позволяющего его идентифицировать с использованием базы данных. Изобретение, следовательно, решает некоторые проблемы известных решений, описанных выше, включая стоимость и доступность средств получения выходных данных.
Однако проблемы позиционирования объекта не решены в этой заявке. Так как только небольшая часть поверхности объекта может быть зарегистрирована, положение объекта при регистрации должно быть известно оператору, работающему с объектом впоследствии. Однако как упоминалось раньше, это не реализуемо в области охраны торговой марки и охраны промышленного образца, так как это положение должно быть известно для очень большого числа объектов. Даже если предположить, что известно место расположения выходных данных на объекте, необходимо обеспечить очень высокую точность позиционирования при получении идентификационных данных, чтобы они соответствовали данным, определенным во время регистрации объекта. Упомянутый документ также описывает технологию, которая требует только знание положения точки привязки. Однако операция считывания всегда требует точной привязки к данной точке, таки образом, проблема позиционирования не может считаться решенной.
Следует отметить, что проблемы позиционирования могут также возникнуть при считывании невидимой маркировки, нанесенной на объект. В действительности, если маркировка идеально нанесена на всем изделии, то она может быть считана без затруднений, вне зависимости от положения считываемой поверхности, но на практике только часть поверхности изделия может быть промаркирована образами невидимых цифровых знаков, в противном случае они бы обладали очень большим размером. Например, чтобы полностью отмаркировать изделие с площадью 15х15 см, при невидимой маркировке разрешением в 2400 dpi, должно быть создано цифровое изображение, состоящее из больше чем 200 миллионов пикселей. Таки образом, создается по меньшей мере одно изображение, покрывающие только часть поверхности изделия, что увеличивает проблему определения области расположения считываемого изображения.
Задачей настоящего изобретения является устранение всех или части этих недостатков.
В соответствии с первым аспектом, настоящее изобретение предлагает считывания физической характеристики объекта, отличающегося тем, что он включает:
- шаг получения первого изображения с, по меньшей мере, части указанного объекта, с первым разрешением,
- шаг определения положения области объекта, подлежащей обработке, по указанному первому изображению,
- шаг получения второго изображения указанной области объекта, подлежащей обработке, со вторым разрешением, большим, чем указанное первое разрешение, и - шаг определения указанной физической характеристики на основании указанного второго изображения.
Таким образом, реализация настоящего изобретения может уменьшить или устранить проблемы технологий, применяющих дорогие и неприменимые средства получения изображения, так как обеспечивается совместимость с недорогими средствами получения цифрового изображения, например, такими как: планшетные сканеры, датчики изображений в цифровых камерах или мобильных телефонах и промышленные камеры. Стоимость этих средств получения изображений постепенно уменьшается, а их производство увеличивается. Кроме того, качество полученного изображения значительно выросло. Большинство планшетных сканеров в настоящее время обеспечивают получение изображения с оптическим разрешением порядка 2400 dpi (точек на дюйм), обеспечивая точность порядка до 10 микрон. Оригинальные портативные электронные микроскопы, подсоединяемые к обыкновенному компьютеру, доступны по умеренным ценам. Промышленные камеры могут обеспечить высококачественные изображения с высоким разрешением даже при большом количестве объектов, проходящих перед ними на большой скорости. Некоторые камеры, называемые «линейными камерами», так как в них используется линейные датчики, могут получать непрерывное изображение, не прибегая к системе активации получения изображения, использующей датчики.
В частности, реализация настоящего изобретения обеспечивает позиционирование интересующей области - области откуда была считана физическая характеристика при регистрации выходных данных объекта для упорядочивания и стандартизации. Отметим, что физические данные, считываемые с помощью настоящего изобретения, включают внутренние характеристики материала, обрабатываемые для получения уникальных выходных данных объекта и маркировки, напечатанные или образованные в процессе маркирования материала.
В соответствии с одним из вариантов реализации, шаг определения положения области объекта, подлежащей обработке, включает определение положения по меньшей мере одной характерной точки объекта, и последующее определение положения области, подлежащей обработке, по отношению к каждой указанной характерной точке объекта. Каждая характерная точка может быть расположена на контуре объекта, например быть его углом.
В соответствии с одним из вариантов реализации, шаг определения положения области объекта, подлежащей обработке, включает определение положения по меньшей мере одной характерной линии объекта, и последующее определение положения области, подлежащей обработке, по отношению к каждой указанной характерной линии объекта. Каждая характерная линия может быть расположена на контуре объекта, например быть его гранью, или находиться внутри области объекта на изображении, представляя, например, острую кромку.
В соответствии с одним из вариантов реализации, способ, предлагаемый в настоящем изобретении и кратко описанный выше, включает шаг определения поступления указанного объекта. Например, датчик, помещенный на уровне линии движения объектов на конвейере и подающий команду на получение и/или обработку изображения объекта.
В соответствии с одним из вариантов реализации, способ, предлагаемый в настоящем изобретении и кратко описанный выше, включает шаг маркирования объекта маркировкой, несущей информацию, соответствующую, по меньшей мере, части указанной физической характеристики. Например, маркировка двухразмерным штрихкодом или защищенной от копирования маркировкой, соответствующими этой информации.
В соответствии с одним из вариантов реализации, что на шаге определения физической характеристики, указанная физическая характеристика связана с локальной структурой поверхности объекта в области, подлежащей обработке.
В соответствии с одним из вариантов реализации, шаг определения положения области объекта, подлежащей обработке, включает направление запроса, содержащего информацию о положении характерных точек и/или линий объекта, и поступление из базы данных информации о форме объекта и о положении области, подлежащей обработке, при указанной форме объекта. Таким образом, могут быть обработаны не отсортированные объекты различных форм за счет распознавания их с помощью получения из базы данных информации о форме объекта и областей, которые должны быть обработаны.
В соответствии с одним из вариантов реализации, шаг определения положения области объекта, подлежащей обработке, включает шаг определения по меньшей мере одного положения нанесенной маркировки, шаг получения изображения указанной по меньшей мере одной маркировки и шаг считывания информации, представленной этой маркировкой и предоставляющей положение области, подлежащей обработке. Таким образом могут быть обработаны объекты с различными положениями областей, подлежащих обработке, но опознанные при помощи по меньшей мере одного маркировочного знака, расположенного на объекте.
В соответствии с одним из вариантов реализации, шаг определения по меньшей мере одного положения нанесенной маркировки включает направление запроса, содержащего информацию о положении характерных точек и/или линий объекта, в базу данных и поступление из базы данных информации о форме объекта и о положении каждой нанесенной маркировки при указанной форме объекта. Таким образом, могут быть обработаны неотсортированные объекты различных форм, путем нахождения положения каждой маркировки, с помощью получения из базы данных информации о форме объекта и подлежащих считыванию маркировках.
В соответствии с одним из вариантов реализации, способ, предлагаемый в настоящем изобретении и кратко описанный выше, включает шаг передачи физической характеристики в базу данных. Таким образом, физические характеристики различных объектов могут быть накоплены по меньшей мере в одной базе данных, например, в базе данных по типу объектов или в базе данных по правообладателю интеллектуальной собственности, относящейся к указанным объектам.
В соответствии с одним из вариантов реализации, способ, предлагаемый в настоящем изобретении, и кратко описанный выше, включает шаг сравнения указанной физической характеристики с физическими характеристиками, сохраненными в указанной базе данных, и определения, какая из ранее сохраненных физических характеристик наиболее схожа с новой физической характеристикой, переданной в базу данных. Настоящее изобретение, следовательно, позволяет не только регистрировать физические характеристики объектов на производстве, но также идентифицировать их при использовании (обращении). Таким образом настоящее изобретение позволяет бороться с серым рынком, т.е. продажей на нелегальном рынке объекта, легально продаваемого на другом рынке.
В соответствии с одним из вариантов реализации, шаг определения положения области объекта, подлежащей обработке, включает определение положения области, расположенной на внутренней части изготовленного объекта. Автор изобретения качественно установил, что внешняя сторона упаковки зачастую имеет покрытие, а внутренняя часть обычно не имеет его. Отсутствие покрытия, однако, облегчает определение физической характеристики, соответствующей локальной структуре поверхности упаковки, так как покрытие приводит поверхность в однородное состояние. Обычно требуется разрешение от 8000 до 12000 dpi для того, чтобы получить физическую характеристику типичной поверхности с покрытием; однако такое разрешение трудно обеспечить при регистрации или получении данных на высокой скорости при применении планшетного сканера. Необходимо отметить, что при изготовления упаковки она преобразуется в емкость только в конце процесса, после печати, обрезки и склеивания.
В соответствии с одним из вариантов реализации, шаг получения первого изображения объекта включает определение скорости прохождения объекта, а шаг определения положения области объекта, подлежащей обработке, включает определение момента получения второго изображения. Таким образом, в случае получения изображения с использованием линейного датчика, искажение изображения, вызванное скоростью объекта, может быть скомпенсировано, а получение второго изображения может быть произведено, когда область, подлежащая обработке, проходит уровень датчика изображения.
В соответствии с одним из вариантов реализации, шаг определения физической характеристики включает предварительный поворот второго изображения. Таким образом компенсируется относительное угловое положение объектов, обрабатываемых последовательно.
В соответствии с одним из вариантов реализации, шаг определения физической характеристики включает выполнение частотного преобразования (Фурье, дискретное косинусоидальное преобразование). Таким образом, число коэффициентов, нуждающихся в обработке для идентификации объекта и запоминании, может быть уменьшено (путем отбрасывания высокочастотных коэффициентов, которые не важны).
В соответствии с одним из вариантов реализации, шаг определения физической характеристики включает хеширование физической характеристики и привязку к ней полученной хеш-суммы. Применение такого хеширования позволяет очень быстро находить физическую характеристику.
В соответствии с одним из вариантов реализации, шаг определения физической характеристики, включает определение физической характеристики объекта. Например, физическая характеристика может быть обусловлена неоднородностью материала, или поверхностного слоя объекта, или нанесенной маркировки, как в "Cryptoglyph" (зарегистрированная торговая марка) или обусловлена маркировкой, предназначенной для обнаружения копии, как в "Seal Vector" (зарегистрированная торговая марка).
В соответствии со вторым аспектом, настоящее изобретение предусматривает устройство для считывания физической характеристики объекта, отличающееся тем, что оно содержит:
- средства получения первого изображения по меньшей мере одной части указанного объекта с первым разрешением,
- средства определения положения области объекта, подлежащей обработке, по указанному первому изображению,
- средства получения второго изображения указанной области объекта, подлежащей обработке, со вторым разрешением, большим, чем указанное первое разрешение и
- средства определения указанной физической характеристики на основании указанного второго изображения.
Так как варианты реализации, преимущества и задачи заявляемого устройства аналогичны таковым способа, являющегося предметом данного изобретения и кратко описанного выше, они не приведены повторно.
Другие преимущества, задачи и признаки настоящего изобретения станут понятными из нижеследующего описания, приведенного в качестве примера, не являющегося ограничительным, со ссылками на чертежи, включенные в приложение, в которых:
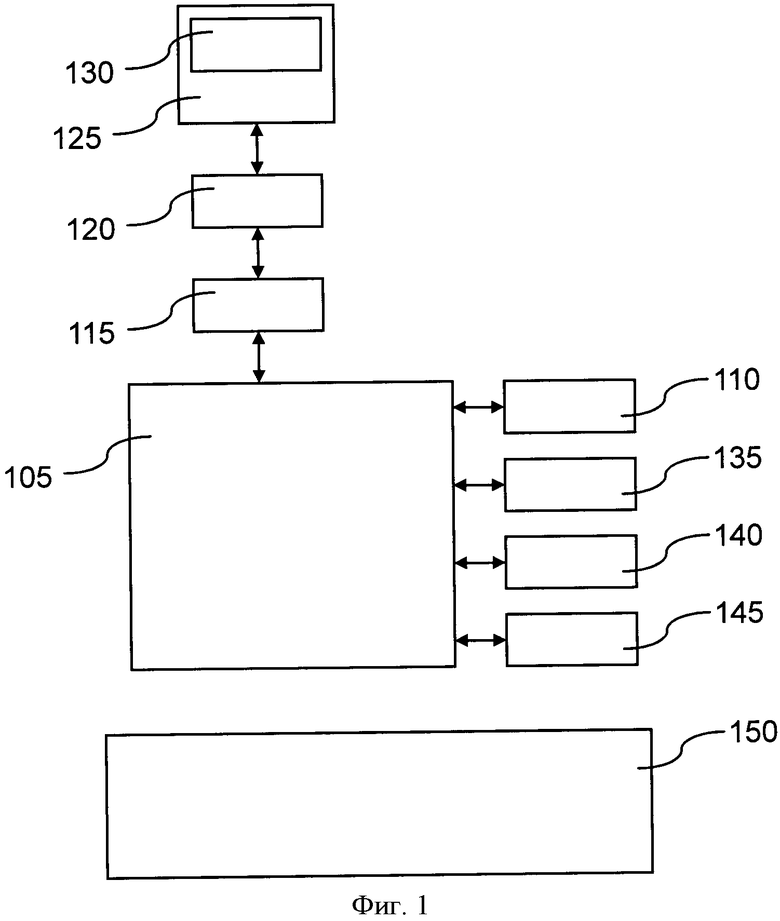
- фигура 1 схематично представляет первый частный вариант реализации устройства, являющегося предметом настоящего изобретения,
- фигура 2 представляет в форме алгоритма шаги первого частного варианта реализации способа, являющегося предметом настоящего изобретения,
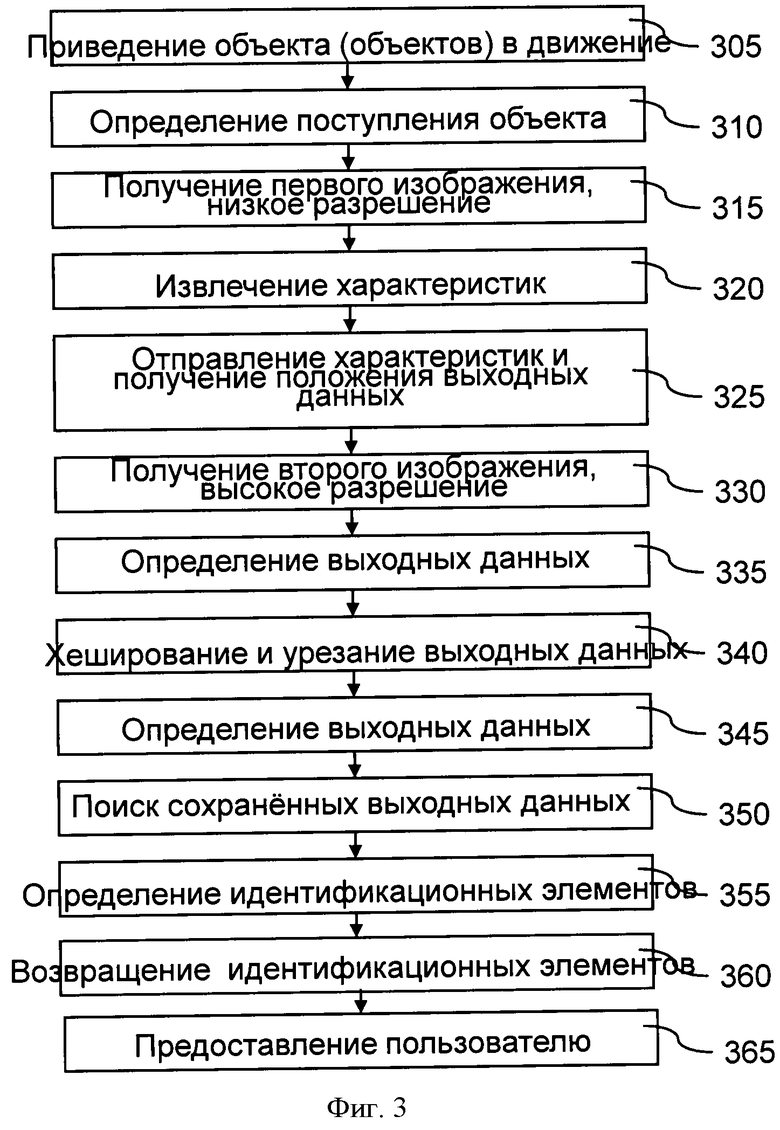
- фигура 3 представляет в форме алгоритма шаги второго частного варианта реализации способа, являющегося предметом настоящего изобретения,
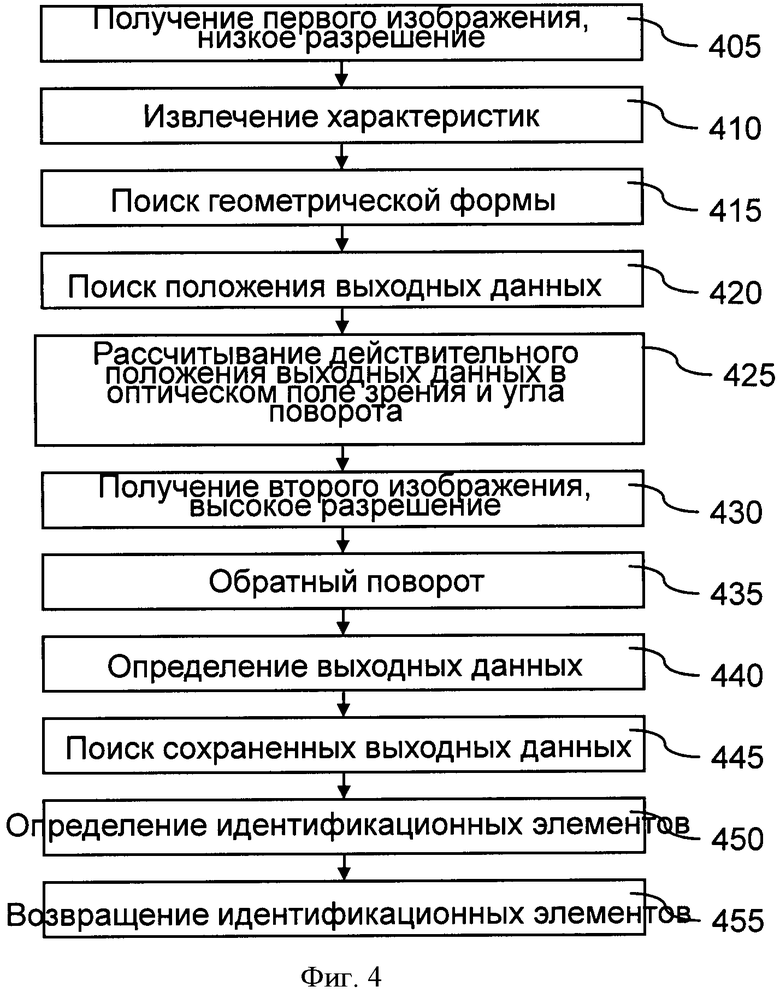
- фигура 4 представляет в форме алгоритма шаги третьего частного варианта реализации способа, являющегося предметом настоящего изобретения,
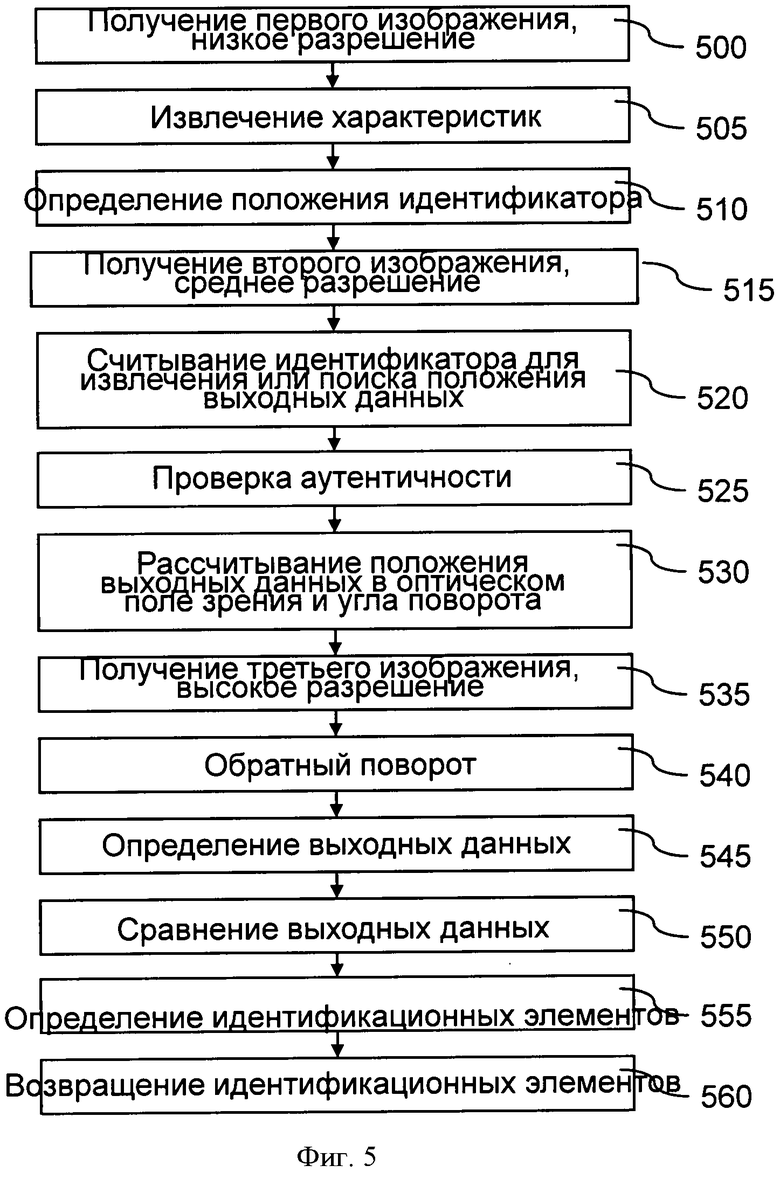
- фигура 5 представляет в форме алгоритма шаги четвертого частного варианта реализации способа, являющегося предметом настоящего изобретения и
- фигура 6 иллюстрирует объект, содержащий средства для реализации способа, являющегося предметом настоящего изобретения.
Полное описание, следующее далее, ограничивается случаями, когда физическая характеристика представляет выходные данные объекта, т.е. она уникальна и позволяет идентифицировать объект. Настоящее изобретение, однако, не ограничивается данным типом физической характеристики, но, напротив, распространяется на структуры материалов, нанесенные маркировки, и вещественные маркировки, которые могут не быть уникальными.
Фигура 1 показывает локальный терминал 105, оборудованный печатающим устройством 110, средством получения изображения 135, двумя датчиками 140 и 145 и средства связи 115 с сетью 120, к которой подключен сервер 125. Сервер 125 оборудован базой данных 130.
Локальный терминал 105 может быть, например, обычным компьютером. Он подключается к производственной или обрабатывающей линии 150 объекта, например, линии упаковки. Линия 150 содержит, например, разгрузочный механизм плоских объектов (не показан) и конвейер (не показан), который передвигает подлежащие обработке объекты один за другим.
Датчик 140 устанавливается на производственной линии 150, перед полем зрения датчика изображения 135 и предназначен для определения поступления объекта, подлежащего обработке. Датчик 140 может быть, например, оптической камерой, содержащей приемник и передатчик световых лучей. Датчик 145 размещается на линии 150 и определяет скорость движения объектов на ней. Например, датчик 145 соединяется с контроллером (не показан), управляющим работой линии 150, или подсоединяется к основанию, по которому движутся объекты, такому, как лента конвейера. Локальный терминал 105 управляет печатающим устройством 110 для осуществления печати на объектах, известным по существу способом, например, струйным или лазерным. Средства связи 115 с сетью 120 - это, например, известный тип модема для связи с сетью 120, например, Интернетом.
Средством получения изображения 135, может быть, например, цифровая камера, камера с линейным датчиком или промышленная камера.
Сервер 125 - это устройство известного типа. База данных 130 содержит по меньшей мере перечень идентификационных признаков объекта и перечень выходных данных, связанных с этими объектами, определенных в соответствии со способом, предложенным в данном изобретении. Как правило, база данных 130 содержит связанные с каждым объектом идентификационный признак, тип объекта и идентификационный признак, определяющий положение области выходных данных для этого типа объекта, идентификационный признак поставщика, обеспечивающего производство или обработку.
Указанный терминал 105 содержит программное обеспечение, которое во время выполнения программы, реализует шаги способа считывания выходных данных объекта, что составляет предмет настоящего изобретения. Сервер 125 содержит программное обеспечение, которое во время работы программы реализует шаги накопления выходных данных и процедуру распознавания.
В ином случае терминал 105 не содержит специальное программное обеспечение, а использует web-браузер и web-сервис, размещенные на сервере 125.
Описание процесса по первому варианту реализации способа считывания выходных данных объекта, являющегося предметом настоящего изобретения, следует со ссылками на шаги, показанные на фигуре 2.
На шаге 205, проектируется тип объекта, например упаковка.
На шаге 210, определяется каждое положение области объекта, из которой будут считываться выходные данные или информация, представляющая положение такой области.
На шаге 215, определяются форма или формы, которые объект может принимать в изображении, полученном датчиком изображения 135 (например, переднюю или заднюю сторону упаковки можно увидеть перед ее сгибанием).
На шаге 220, определяются характерные точки или линии объекта исходя из указанной формы объекта.
На шаге 225, определяется положение каждой указанной области в пределах каждой из форм.
На шаге 230, для каждого типа объекта запоминается результат операций 215-225, например, в базе данных 130.
На шаге 235, определяется поступление объекта близ зоны видимости датчика изображения или поступление непосредственно в нее. Затем измеряется скорость объекта и в зависимости от этой скорости и расстояния между местом поступления объекта и краем зоны видимости датчика определяется длительность задержки до получения изображения объекта. Затем следует ожидание в пределах этой длительности.
На шаге 240, получается первое изображение объекта с первым разрешением.
На шаге 245, выполняется обработка изображения объекта для получения характеризующего контура, линий или точек, например, прямых граней или углов контура.
На шаге 250, результат обработки изображения посылается в сервер; в свою очередь сервер на основании этого результата определяет и пересылает положение области выходных данных и положение информационного сообщения, располагаемого внутри видимой формы объекта. Например, наносимое информационное сообщение может быть двухразмерным штрихкодом.
На шаге 255, изображение области выходных данных получается при втором разрешении, большим чем первое разрешение. В операции 260, выходные данные объекта определяются в соответствии с известными технологиями, или исходя из локальной структуры материала в области выходных данных, или исходя из повреждения защищенной от копирования маркировки во время ее нанесения. Например, преобразование Фурье или дискретное косинусное преобразование применяются для полученной структуры или для матрицы маркировки, защищенной от копирования с опечатками. По возможности выполняется квантование величин, с целью сжатия информации представленной в двоичном коде. Таким способом, как правило, выполняется хеширование выходных данных и, дополнительно, производится урезание хеш-суммы, полученной вследствие хеширования в операции 265.
На шаге 270 выходные данные и хеш-сумма посылаются на сервер; сервер включает эти значения в базу данных вместе с другими идентификационными элементами объекта (место и время производства, рынок назначения, тип объекта, серийный номер и т.д.)
На шаге 275 либо выходные данные, либо хеш-сумма и положение области выходных данных кодируются и составляют наносимое информационное сообщение. Например, выполняется кодирование, известное как "Datamatrix" (зарегистрированная торговая марка).
На шаге 280, закодированные данные наносятся в области наносимого информационного сообщения.
Таким образом, в частном варианте реализации, до регистрации:
- определяют или получают основную форму объекта;
- определяют или получают тип макроскопической поверхности, например, с покрытием или нет, на передней или задней стороне,
- дополнительно, определяют или получают по меньшей мере одну точку привязки объекта;
- дополнительно, определяют или получают уникальные свойства поверхностей расположенных в различных частях объекта и
- определяют положение области получения выходных данных на объекте исходя из: основной формы объекта и макроскопических характеристик поверхности и, дополнительно, из точек привязки и уникальных свойств поверхностей.
Во время регистрации, для каждого объекта:
- определяют прохождение одного конца объекта, или по меньшей мере одной точки объекта,
- устанавливают положение области выходных данных, или вычисляют точное время получения изображения,
- запоминают изображение,
- дополнительно, пересчитывают выходные данные,
- дополнительно, по меньшей мере один полукомплект выходных данных маркируют на объект.
В некоторых вариантах реализации, применяют стандартные средства получения изображения, случайной структуры поверхности объекта, для создания уникальных выходных данных.
Перед описанием применения настоящего изобретения в случае идентификации упаковок отметим, что обычно на упаковках изготовленных из листов картона или пластика, печать выполняется способом флексографии. Шаг подготовки перед печатью позволяет сконструировать упаковку таким образом, чтобы маркировка была нанесена на изготавливаемой пластине максимально возможное число раз, и тем самым минимизировать затраты, связанные с потерями на неиспользованный картон. Листы картона с нанесением помещают в машину, которая нарезает их в упаковочные коробки. Затем, обычно, коробки необходимо отправить в место сборки изделий, например, в сборочный цех.
В этом особенном случае, при идентификации упаковки, желательно, чтобы выходные данные были созданы после того, как коробка вырезана, например, в сборочном цехе. Это даст уверенность в том, что были одобрены только оригинальные изделия. Выходные данные могут быть рассчитаны с уже вырезанной коробки или с закрытой коробки после ее прохождения через гибочно-склеивающую машину.
Бумага или картон имеют много поверхностных дефектов, которые могут быть обнаружены при получении изображения с относительно низким разрешением, например 2400 dpi. Однако данные дефекты могут быть укрыты дополнительным слоем при нанесении его на картон. Поверхность этого слоя также обладает хаотичными поверхностными дефектами. Однако размер этих дефектов меньше, и более высокое разрешение (например, до 10000 dpi) требуется для их получения. Передняя сторона упаковочной коробки обычно имеет покрытие, но противоположная, обратная сторона несложенной коробки (т.е. внутренняя поверхность, когда коробка сложена) обычно не имеет покрытия. Следовательно, предпочтительно получить изображение обратной стороны (соответственно внутренней части закрытой упаковки) коробки для получения выходных данных. С другой стороны, нанесенная маркировка, соответствующая положению выходных данных, может быть выполнена на передней или на задней сторонах коробки.
Описание процесса по второму варианту реализации способа считывания выходных данных объекта, являющегося предметом настоящего изобретения, следует со ссылками на шаги, показанные на фигуре 3.
На шаге 305, указанный объект приводится в движение, например, на конвейере с цифровым датчиком изображения, оптическими датчиками положения и компьютером для управления, обработки и связи с сервером.
На шаге 310, определяется поступление объекта близ зоны видимости датчика изображения или поступление непосредственно в нее. Затем измеряется скорость объекта и, в зависимости от этой скорости и расстояния между местом поступления объекта и краем зоны видимости датчика, определяется длительность задержки до получения изображения объекта. Затем следует ожидание в пределах этой длительности.
На шаге 315, получается первое изображение объекта с первым разрешением.
На шаге 320, выполняется обработка изображения объекта для получения характеризующего контура, линий или точек, например, прямых граней или углов контура.
На шаге 325, результат обработки изображения посылается в сервер; в свою очередь сервер на основании этого результата определяет и пересылает положение области выходных данных и положение информационного сообщения, располагаемого внутри видимой формы объекта. Например, наносимое информационное сообщение может быть двухразмерным штрихкодом.
На шаге 330, изображение области выходных данных получается при втором разрешении, большем, чем первое разрешение. В операции 335, выходные данные объекта определяются в соответствии с известными технологиями, или исходя из локальной структуры материала в области выходных данных, или исходя из повреждения защищенной от копирования маркировки во время ее нанесения. Например, преобразование Фурье или дискретное косинусное преобразование применяют для полученной структуры или для поврежденной матрицы указанной маркировки. По возможности выполняется квантование величин с целью сжатия информации, представленной в двоичном коде. Таким способом, как правило, выполняется хеширование выходных данных и, дополнительно, производится урезание хеш-суммы, полученной вследствие хеширования в операции 340.
На шаге 345, выходные данные и хеш-сумма посылаются на сервер. В операции 350 сервер осуществляет поиск для нахождения выходных данных и/или хеш-суммы, хранящихся в базе данных, и наиболее соответствующими с полученным, применяя известные технологии поиска по базе данных.
На шаге 355, определяются идентификационные элементы объекта, связанные с результатом поиска на шаге 350 (место и время производства, рынок назначения, тип объекта, серийный номер и т.д.)
На шаге 360, эти идентификационные элементы возвращаются на компьютер, используемый для проверки изображений, и в операции 365 эти элементы предоставляются пользователю, например, на экране компьютера.
Уже известные технологии из предыдущих решений могут быть использованы для определения выходных данных по полученному изображению, например, применение низкочастотной фильтрации для исключения шума и лишних данных. Частота изображения может быть преобразована, например, с помощью дискретного косинусного преобразования (DCT) или быстрого преобразования Фурье (FFT). При этом число коэффициентов, необходимых для предоставления выходных данных, может быть существенно уменьшено.
Могут быть применены способы, развитые в биометрии для хранения конфиденциальной хеш-суммы. Например, применяют двухуровневое квантование для хранения биометрических выходных данных, таких как хеш-сумма, что позволяет восстановить информацию очень быстро.
Следует отметить, что в некоторых вариантах реализации возможно применение обычного компьютера, связанного с планшетным сканером. Планшетные сканеры - это удобные средства получения изображения для получения выходных данных, т.к. они могут получить большую область с относительно высоким разрешением. Однако, если у пользователя есть возможность произвольно поместить проверяемый объект на сканере, почти невозможно получить полную область (обычно размера А4), так как это занимает длительное время (несколько минут) и требует большой объем памяти. Кроме того, обычно желательно избежать взаимодействий пользователя со сканером, так как существует множество установок, настраиваемых пользователем, которые могут влиять на качество изображения: велика вероятность неправильной установки, даже для опытных пользователей.
Для решения этих проблем в вариантах реализации изобретения применяют сканер, а область получаемых выходных данных определяют автоматически по изображению с более низким разрешением, что делает возможным определение положения выходных данных. Для управления сканером стандартный интерфейс "Twain" (зарегистрированная торговая марка) может управлять всеми установками сканера.
В третьем варианте реализации, показанном на фигуре 4, геометрическая форма объекта используется для определения положения выходных данных:
- на шаге 405, получают изображение по меньшей мере большей части обратной поверхности упаковки с низким разрешением,
- на шаге 410, определяют границы объекта и дополнительно определяют характерную точка объекта,
- на шаге 415, по базе данных находят геометрическую форму объекта, на основании его границ и дополнительно на основании характерных точек объекта,
- на шаге 420, на основании геометрической формы объекта определяют соответствующее положение области выходных данных, находящееся в памяти,
- на шаге 425, вычисляют действительное положение области выходных данных внутри поля, полученного сканером и вычисляют угол поворота изображения,
- на шаге 430, получают при высоком разрешении, определенную таким образом область выходных данных
- на шаге 435, дополнительно, выполняют обратный поворот относительно поворота, определенного в операции 425,
- на шаге 440, определяют выходные данные внутри области, полученной при высоком разрешении,
- на шаге 445, для соответствующих выходных данных исследуют базу выходных данных,
- на шаге 450, определяют идентификационные элементы объекта, связанные с результатом исследования на шаге 445 (место и время производства, рынок назначения, тип объекта, серийный номер и т.д.) и
- на шаге 455, эти идентификационные элементы возвращают в компьютер, используемый для контроля изображений.
В четвертом варианте реализации, показанном на фигуре 5, используют информационное сообщение, сохраненное в идентификационном коде и/или коде распознавания, для определения положения выходных данных.
Применение 2D, или в частности 1D, штрихкодов, в качестве идентификаторов имеет преимущества, так как 1D штрихкоды находятся очень легко, а их ориентация точно определяется благодаря очень сильной поляризации градиента изображения вследствие противоположности однонаправленных или двунаправленных черной и белой областей.
- на шаге 500, получают изображение, по меньшей мере, большой части поверхности упаковки при первом разрешении, называемом «низким» разрешением,
- на шаге 505, определяют границы объекта или по меньшей мере одну характерную точку,
- в различных вариантах, указанное изображение содержит идентификатор, который затем считывают, или на шаге 510, определяют положение идентификатора объекта (например, одноразмерного или двухразмерного штрихкода), а на шаге 515 изображение указанного идентификатора получают при втором разрешении, называемом «средним», которое выше, чем первое разрешение,
- на шаге 520, указанный идентификатор считывают для получения положения выходных данных в документе, данную операцию выполняют либо на месте путем декодирования/дешифрования идентификатора, или дистанционно путем отправления запроса в базу данных, связывающих идентификаторы и положение выходных данных,
- дополнительно, если код идентификатора также является и аудентификатором, на шаге 525 проверяют аутентификацию кода (получают дополнительное изображение при высоком разрешении), и, если это так, следует шаг 530,
- на шаге 530 рассчитывают положение области выходных данных внутри поля изображения и угол поворота выходных данных, основываясь на:
- положении области выходных данных, учтивая масштаб и угол поворота в документе, основываясь как на сохраненных в памяти так и на полученных на основе идентификатора данных и
- положении по меньшей мере одной характерной точки документа внутри этого поля изображения,
- на шаге 535, изображение части упаковки получают при третьем разрешении, называемом «высокое», которое, по меньшей мере, равно первому разрешению, и предпочтительно, по меньшей мере, равно второму разрешению, соответствующему положению, определенному на шаге 520, предпочтительно на обратной стороне документа (соответственно внутренней стороне упаковки),
- дополнительно, на шаге 540, выполняют обратный поворот изображения выходных данных,
- на шаге 545, определяют выходные данные документа по полученному изображению, по возможности после обратного поворота,
- на шаге 550, исследуют базу выходных данных для нахождения выходных данных, определенных на шаге 545, или данные выходные данные сравнивают с выходными данными, зашифрованными в идентификационном коде,
- на шаге 555, определяют идентификационные элементы объекта, связанные с результатом исследования на шаге 550 (место и время производства, рынок назначения, тип объекта, серийный номер и т.д.) и
- на шаге 560, эти идентификационные элементы возвращают в компьютер, используемый для контроля изображений.
Возможно, два варианта реализации, показанные на фигурах 4 и 5, могут быть скомбинированы.
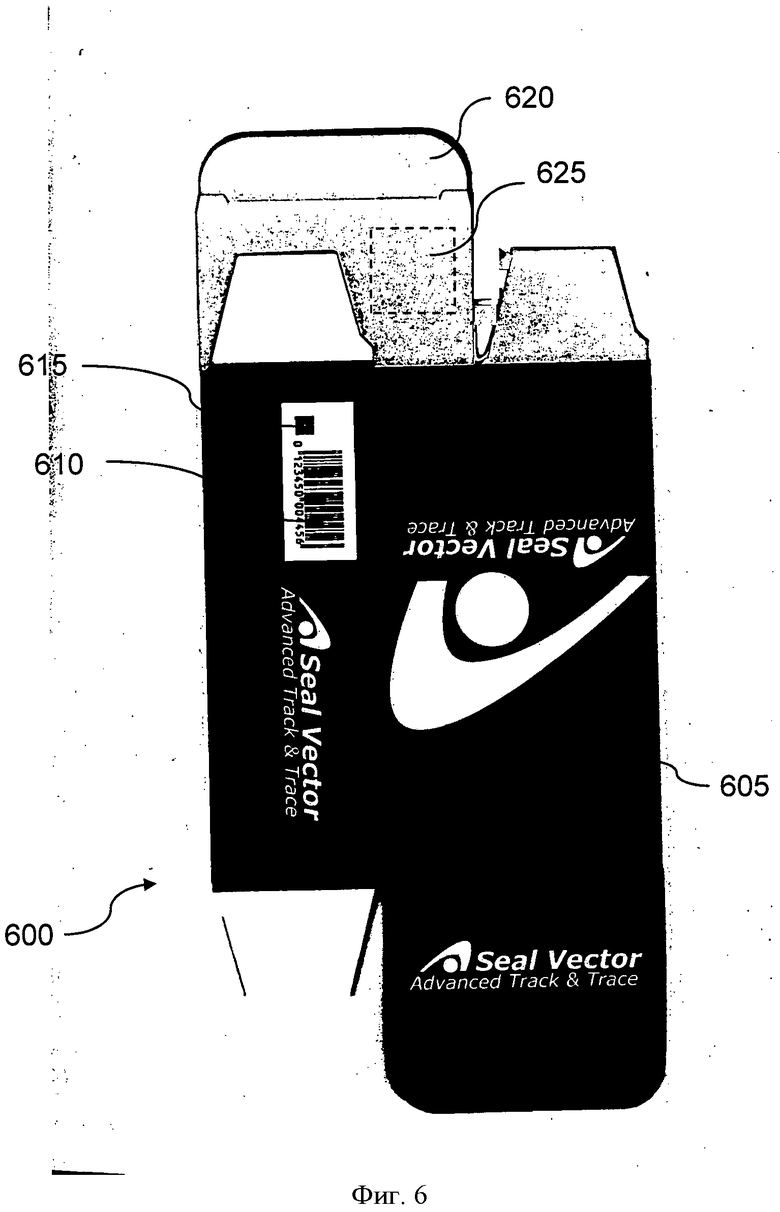
Фигура 6 показывает объект 600, обладающий склеенной и сложенной упаковка с напечатанной и имеющей покрытие внешней частью 605 и непокрытой внутренней частью 620. Внешняя часть 605 называется так потому, что при нахождении защищаемого и/или идентифицируемого продукта внутри упаковки, она расположена на внешней стороне. Наоборот, в том же случае, внутренняя часть 620 находится на внутренней стороне упаковки.
Внешняя часть 605 несет штрихкод 610 и маркировку, выполненную таким образом, чтобы можно было установить копию 615, т.е. ее вид значительно изменяется, при копировании упаковки. Штрихкод 610 предоставляет информацию, которая указывает на положение маркировки 615 и на положение интересующей области 625, в которой расположены элементы, определяющие физические характеристики объекта, такие, как выходные данные.
Очевидно, что в соответствии с настоящим изобретением, из изображения с низким разрешением объекта 600 определяют положение интересующей области, содержащей маркировку 615, точно так же, как определяют интересующую область 625, в которой можно определить выходные данные, предпочтительно, после считывания информации со штрихкода 610. Как только устанавливают положение этих областей, получают изображение каждой из них с более высоким разрешением, а после обработки этих изображений определяют физическую характеристику, например, содержание маркировки 615 и выходные данные обусловленные интересующей областью 625.
Технологии, описанные здесь, можно применять для облегчения считывания невидимого числового кода, такого как "Cryptoglyph" или "Seal Vector", информационной матрицы, защищенной от копирования, и специфических выходных данных, получаемых при распечатывании этих кодов.
Изобретение относится к способу и устройству для считывания физических характеристик объекта. Техническим результатом является обеспечение позиционирования интересующей области, откуда считывается физическая характеристика объекта при регистрации выходных данных объекта для упорядочивания и стандартизации. Способ считывания физической характеристики объекта включает: шаг (240, 315, 405) получения первого изображения по меньшей мере части объекта с первым разрешением; шаг (245, 320, 415, 420) определения положения области объекта, подлежащей обработке, на основании первого изображения; шаг (255, 330, 430) получения второго изображения области объекта, подлежащей обработке, со вторым разрешением, большим, чем первое разрешение; и шаг (260, 335, 440) определения физической характеристики на основании второго изображения, причем шаг (245, 320, 415, 420) определения положения области объекта, подлежащей обработке, содержит: шаг определения по меньшей мере одного положения нанесенной маркировки, шаг получения изображения по меньшей мере одной указанной маркировки и шаг считывания информации, представленной этой маркировкой и представляющей положение области, подлежащей обработке. 2 н. и 15 з.п. ф-лы, 6 ил.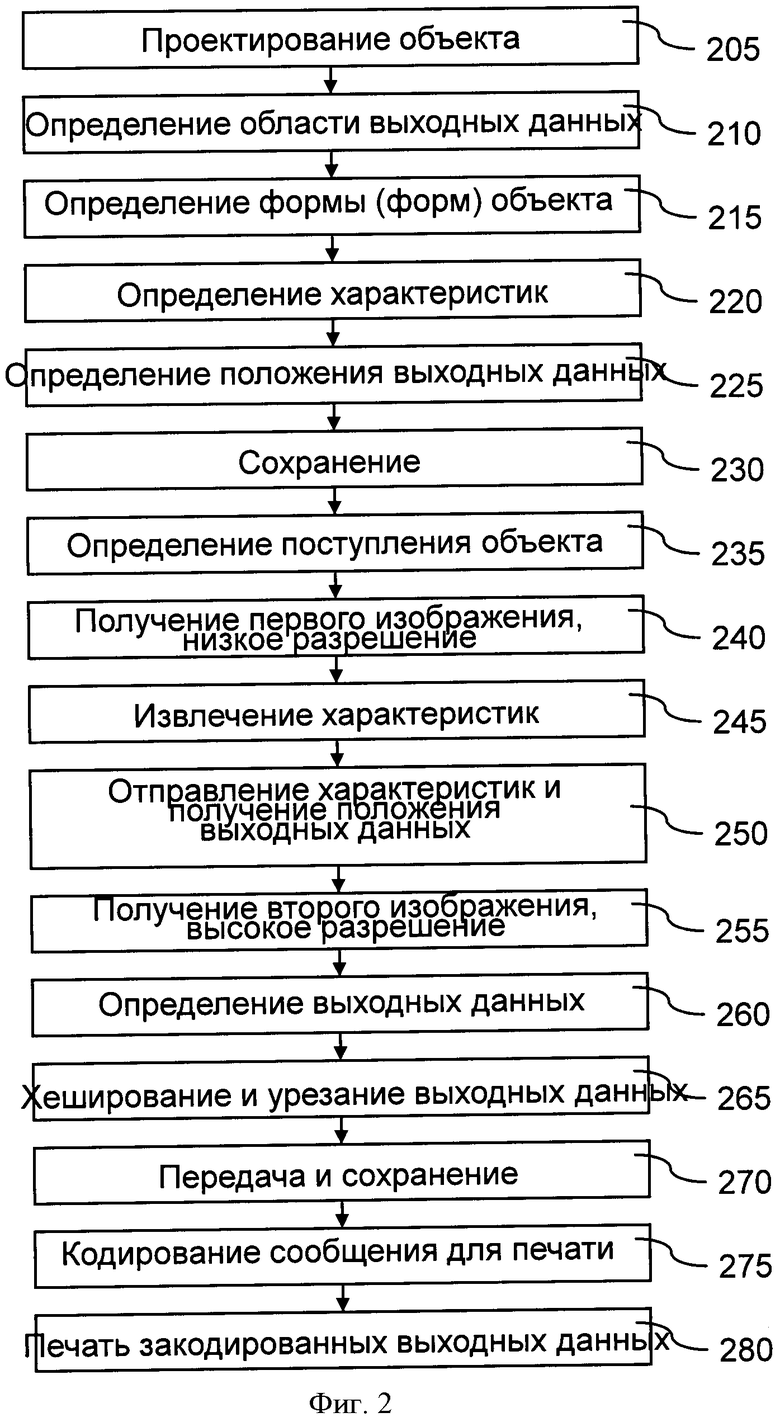
1. Способ считывания физической характеристики объекта, отличающийся тем, что он включает:
- шаг (240, 315, 405) получения первого изображения, по меньшей мере, части объекта с первым разрешением;
- шаг (245, 320, 415, 420) определения положения области объекта, подлежащей обработке, на основании первого изображения;
- шаг (255, 330, 430) получения второго изображения области объекта, подлежащей обработке, со вторым разрешением, большим чем первое разрешение; и
- шаг (260, 335, 440) определения физической характеристики на основании второго изображения,
причем шаг (245, 320, 415, 420) определения положения области объекта, подлежащей обработке, содержит:
- шаг определения по меньшей мере одного положения нанесенной маркировки,
- шаг получения изображения по меньшей мере одной указанной маркировки и
- шаг считывания информации, представленной этой маркировкой и представляющей положение области, подлежащей обработке.
2. Способ по п.1, отличающийся тем, что шаг (245, 320, 415, 420) определения положения по меньшей мере одной нанесенной маркировки включает направление запроса, содержащего информацию о положении характерных точек и/или линий объекта, в базу данных и поступление из базы данных информации о форме объекта и о положении каждой нанесенной маркировки на указанной форме объекта.
3. Способ по п.1 или 2, в котором шаг (245, 320, 415, 420) определения положения области объекта, подлежащей обработке, включает определение положения по меньшей мере одной характерной точки объекта и последующее определение положения области, подлежащей обработке, по отношению к каждой характерной точке объекта.
4. Способ по п.1 или 2, в котором шаг (245, 320, 415, 420) определения положения области объекта, подлежащей обработке, включает определение положения по меньшей мере одной характерной линии объекта и последующее определение положения области, подлежащей обработке, по отношению к каждой характерной линии объекта.
5. Способ по п.1 или 2, включающий шаг (310) определения поступления объекта.
6. Способ по п.1 или 2, включающий шаг (280) маркирования объекта посредством маркировки, несущей информацию, соответствующую, по меньшей мере, части указанной физической характеристики.
7. Способ по п.1 или 2, в котором на шаге (260, 335, 440) определения физической характеристики эта характеристика связана с локальной структурой поверхности объекта в области, подлежащей обработке.
8. Способ по п.1 или 2, в котором шаг (245, 320, 415, 420) определения положения области объекта, подлежащей обработке, включает направление запроса, содержащего информацию о положении характерных точек и/или линий объекта, в базу данных и поступление из базы данных информации о форме объекта и о положении области, подлежащей обработке, при указанной форме объекта.
9. Способ по п.1 или 2, включающий шаг (250, 325, 445) передачи физической характеристики в базу данных.
10. Способ по п.9, включающий шаг (355, 450) сравнения указанной физической характеристики с физическими характеристиками, сохраненными в базе данных, и определения, какая из ранее сохраненных физических характеристик наиболее схожа с новой физической характеристикой, переданной в базу данных.
11. Способ по п.1 или 2, в котором на шаге (245, 320, 415, 420) определения положения области объекта, подлежащей обработке определяют положение области, расположенной на внутренней части изготовленного объекта.
12. Способ по п.1 или 2, в котором шаг (315) получения первого изображения объекта включает использование скорости прохождения объекта, а шаг определения положения области объекта, подлежащей обработке, включает определение момента получения второго изображения.
13. Способ по п.1 или 2, в котором шаг (440) определения физической характеристики включает предварительный поворот второго изображения (435).
14. Способ по п.1 или 2, в котором шаг (260, 335) определения физической характеристики включает хеширование физической характеристики (365, 340) и привязку к ней полученной хеш-суммы.
15. Способ по п.1 или 2, в котором шаг (260, 335, 440) определения физической характеристики включает определение физической характеристики объекта.
16. Устройство для считывания физической характеристики объекта, отличающееся тем, что оно содержит:
- средства получения первого изображения по меньшей мере одной части объекта с первым разрешением,
- средства определения положения области объекта, подлежащей обработке, на основании первого изображения,
- средства получения второго изображения области объекта, подлежащей обработке, со вторым разрешением, большим, чем первое разрешение, и
- средства определения физической характеристики на основании второго изображения,
причем средства определения положения области объекта, подлежащей обработке, выполнены с возможностью
определения по меньшей мере одного положения нанесенной маркировки,
получения изображения по меньшей мере одной указанной маркировки и
считывания информации, представленной этой маркировкой и представляющей положение области, подлежащей обработке.
17. Устройство по п.16, в котором средства определения положения области объекта, подлежащей обработке, выполнены с возможностью
направления запроса, содержащего информацию о положении характерных точек и/или линий объекта, в базу данных и
получения из базы данных информации о форме объекта и о положении каждой нанесенной маркировки на указанной форме объекта.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| US 7152795 B2, 26.12.2006 | |||
| СПОСОБ ЗАЩИТЫ ЦЕННЫХ БУМАГ ОТ ПОДДЕЛКИ | 1994 |
|
RU2088971C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ УНИКАЛЬНЫХ ПРИРОДНЫХ ОБЪЕКТОВ | 2001 |
|
RU2206122C1 |

