Область техники
Настоящее изобретение относится к якорю линейного электродвигателя и к линейному электродвигателю.
Предшествующий уровень техники
Известен тип электродвигателя, который линейно перемещает подвижный элемент вдоль статора, используя силы притяжения и отталкивания между магнитными полюсами.
Линейный электродвигатель может содержать датчик Холла, который может быть предусмотрен в подвижном элементе как блок детектирования, детектирующий положение подвижного элемента. Этот блок детектирования предусмотрен, например, на конце подвижного элемента, который находится в направлении рабочего хода. Эта технология известна, например, из выложенной заявки на патент Японии № 1996-168232.
Однако подразумевается, что блок детектирования предусмотрен на конце подвижного элемента, который находится в направлении рабочего хода, и возникает проблема в диапазоне подвижности подвижного элемента, заключающаяся в том, что доступная длина рабочего хода уменьшается на длину этого блока детектирования.
Задачей одного аспекта настоящего изобретения является создание якоря линейного электродвигателя и линейного электродвигателя, в которых длина рабочего хода не уменьшается.
Краткое изложение существа изобретения
Якорь линейного электродвигателя, согласно одному аспекту настоящего изобретения, содержит сердечник якоря, опорные зубцы, и блок детектирования. Сердечник якоря содержит основные зубцы. Опорные зубцы расположены на концах сердечника якоря, обращенных в направлении рабочего хода. Блок детектирования детектирует положение сердечника якоря. Кроме того, блок детектирования предусмотрен в положении, перекрывающем опорные зубцы в направлении рабочего хода.
Согласно одному аспекту настоящего изобретения предлагается якорь линейного электродвигателя и линейный электродвигатель, в которых длина рабочего хода не уменьшается.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
Фиг.1А изображает схематический вид сбоку линейного электродвигателя по первому варианту настоящего изобретения.
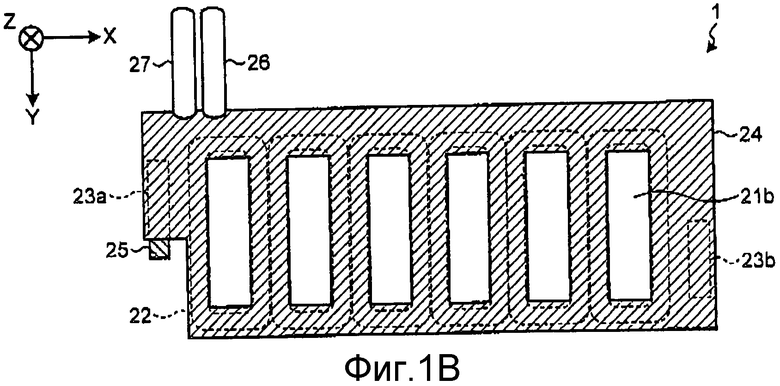
Фиг.1В изображает схематический вид сверху линейного электродвигателя по первому варианту настоящего изобретения.
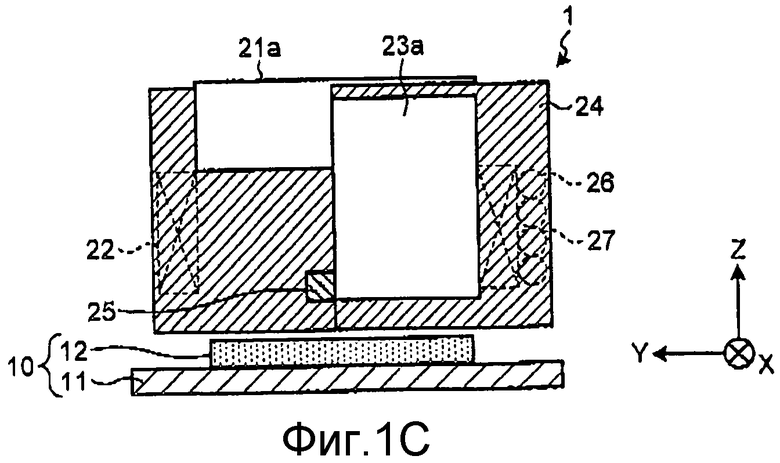
Фиг.1С изображает схематическое сечение линейного электродвигателя по первому варианту настоящего изобретения.
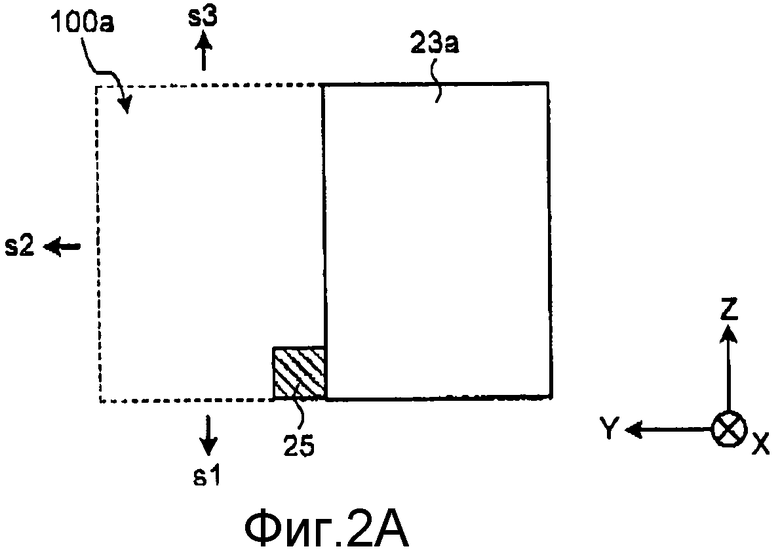
Фиг.2А изображает схематический вид спереди, иллюстрирующий расположение опорных зубцов и блока детектирования.
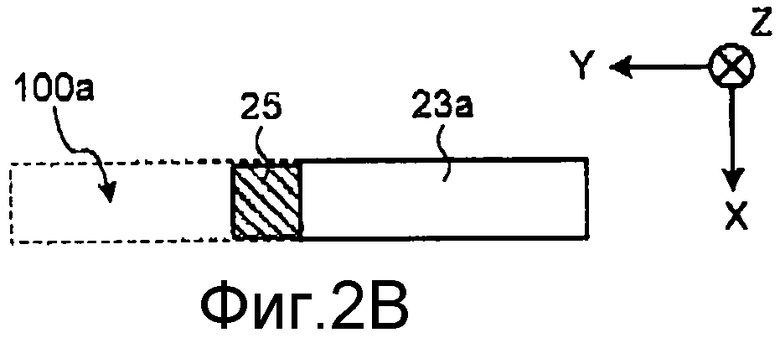
Фиг.2В изображает схематический вид сверху, иллюстрирующий расположение опорных зубцов и блока детектирования.
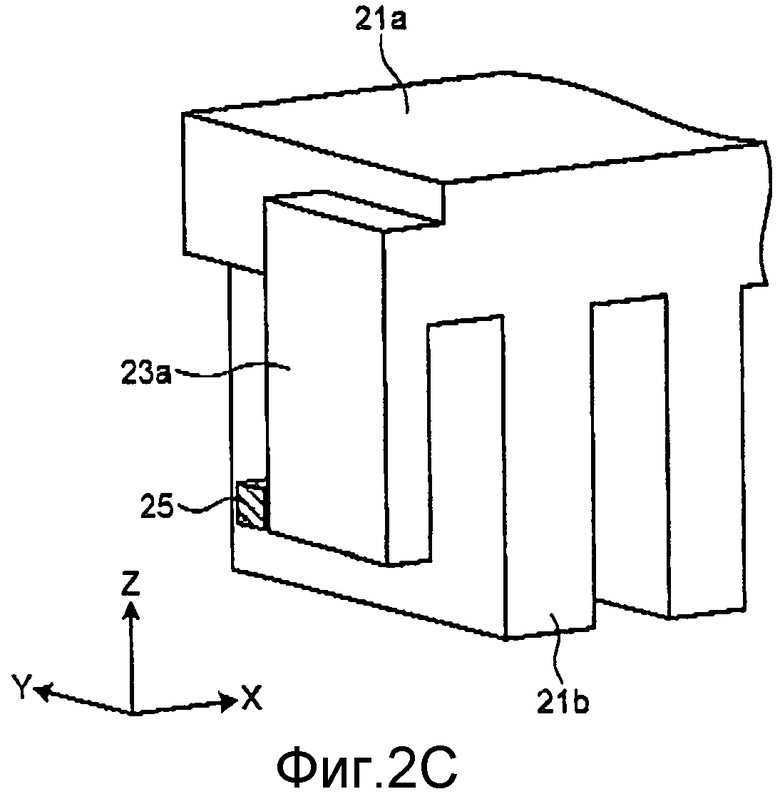
Фиг.2С изображает схематический общий вид, иллюстрирующий расположение опорных зубцов и блока детектирования.
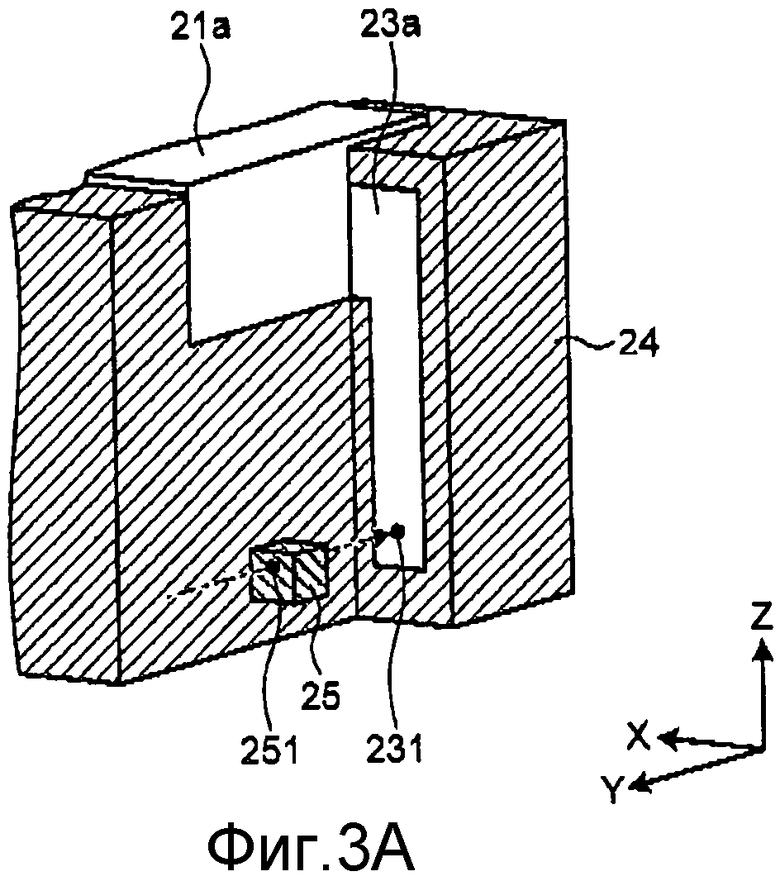
Фиг.3А изображает схему, иллюстрирующую пример места установки блока детектирования.
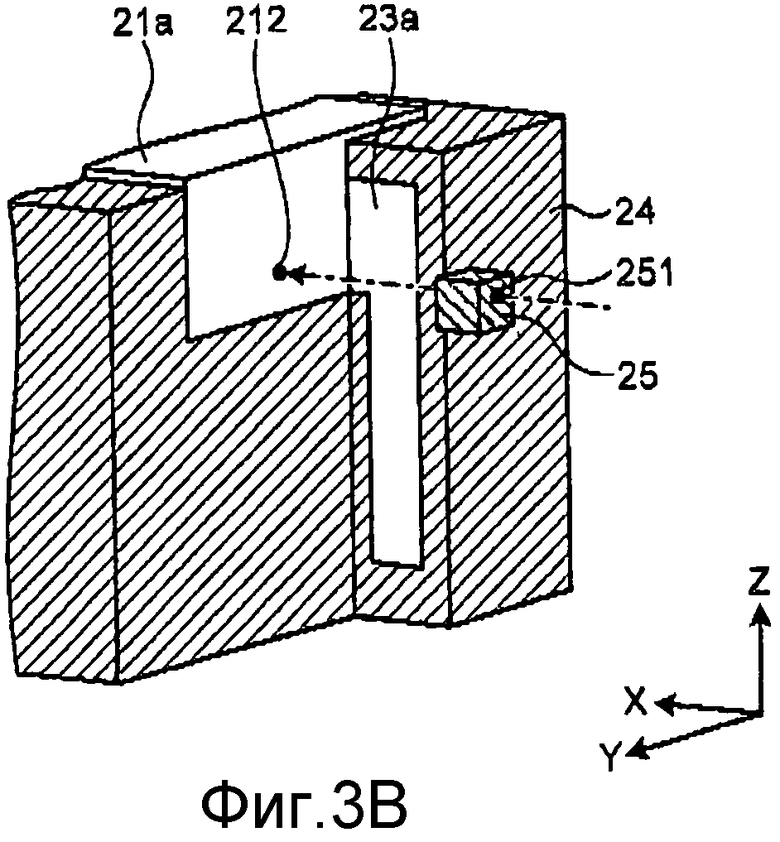
Фиг.3В изображает схему, иллюстрирующую другой пример места установки блока детектирования.
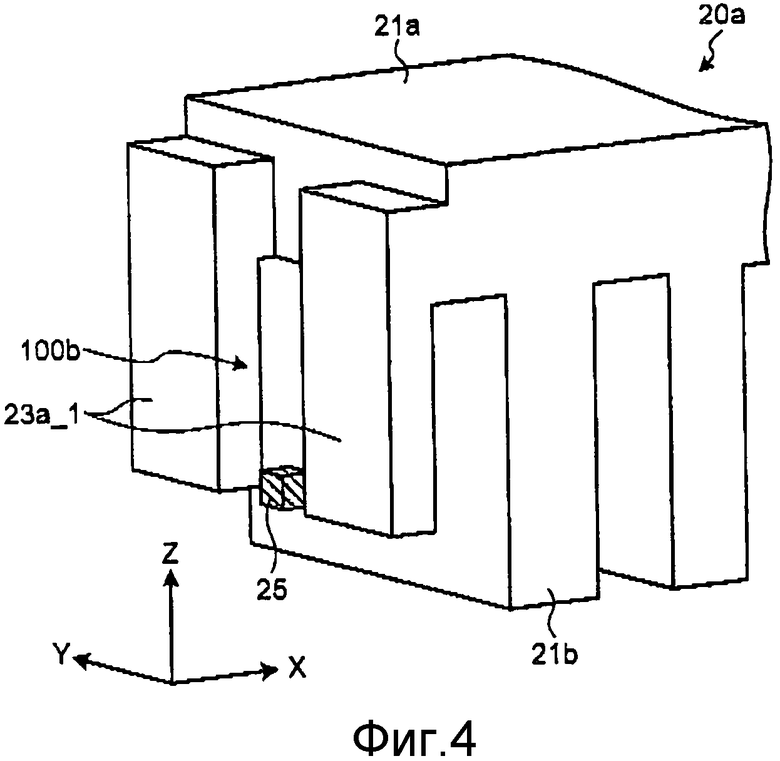
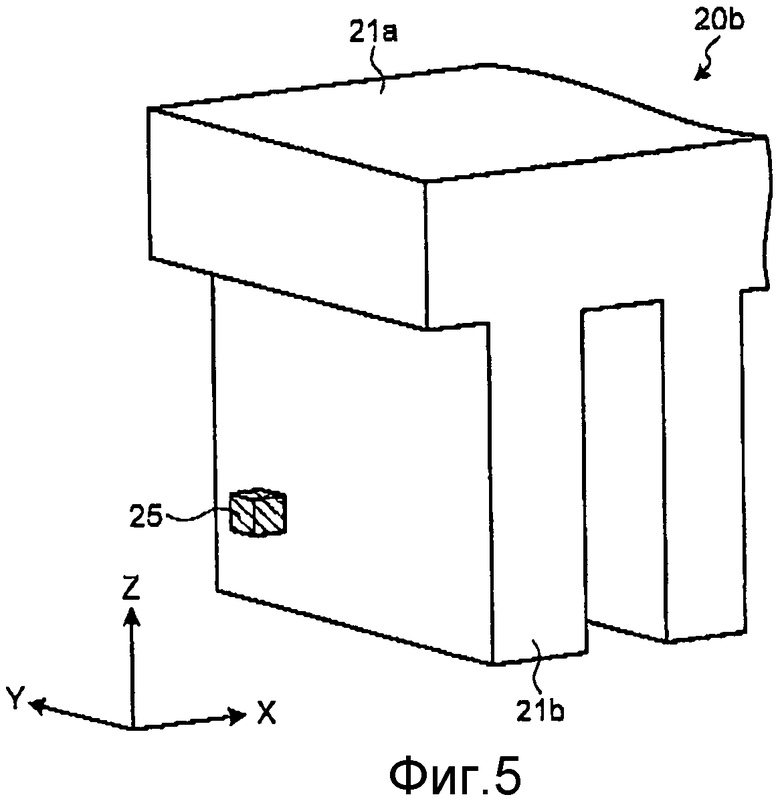
Фиг.4 и 5 изображают схематические общие виды, иллюстрирующие другой пример расположения опорных зубцов и блока детектирования.
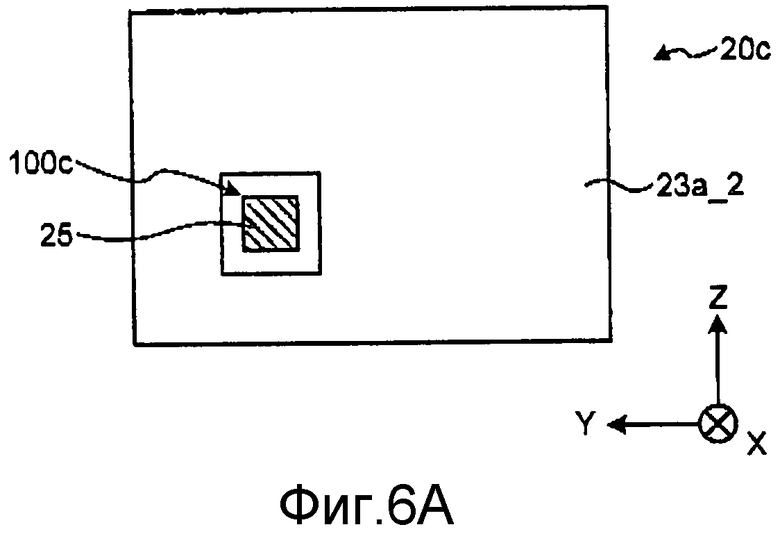
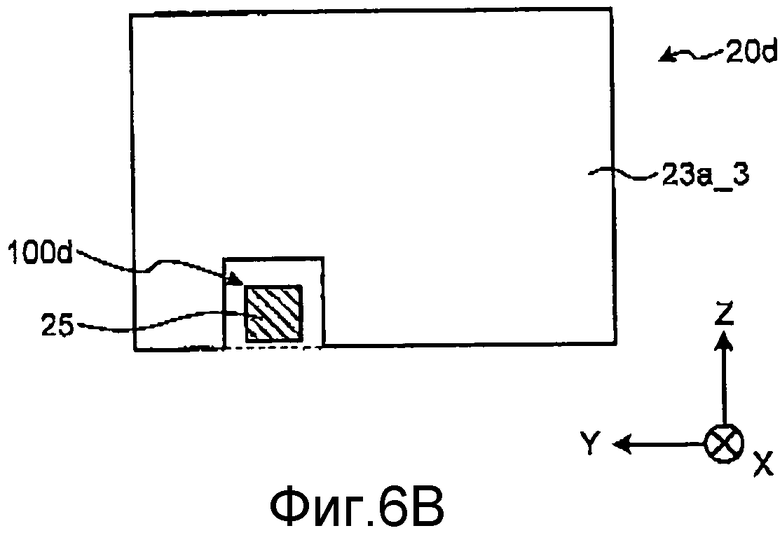
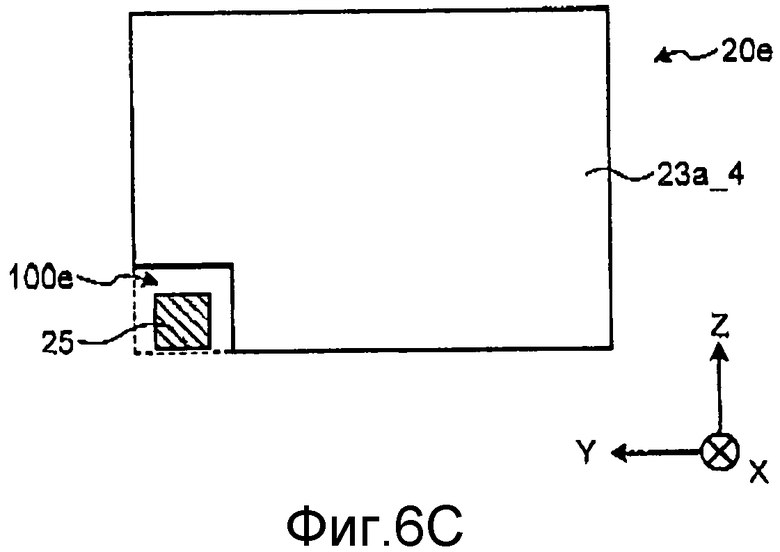
Фиг.6А-6С изображают схематические виды спереди, иллюстрирующие другой пример расположения опорных зубцов и блока детектирования.
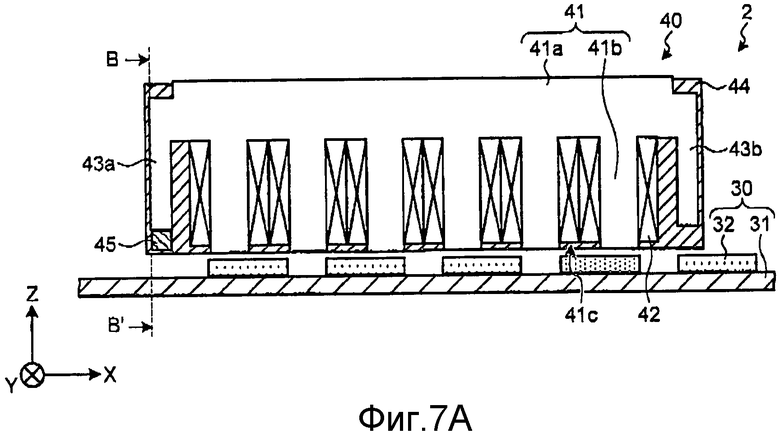
Фиг.7А изображает схематический вид сбоку линейного двигателя по третьему варианту настоящего изобретения.
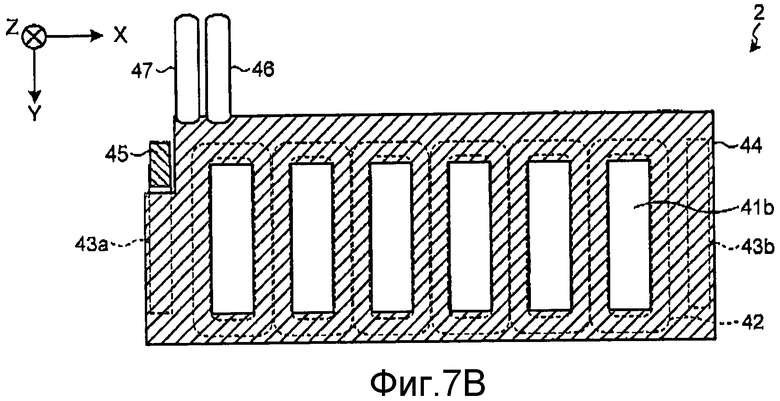
Фиг.7В изображает схематический вид сверху линейного двигателя по третьему варианту настоящего изобретения.
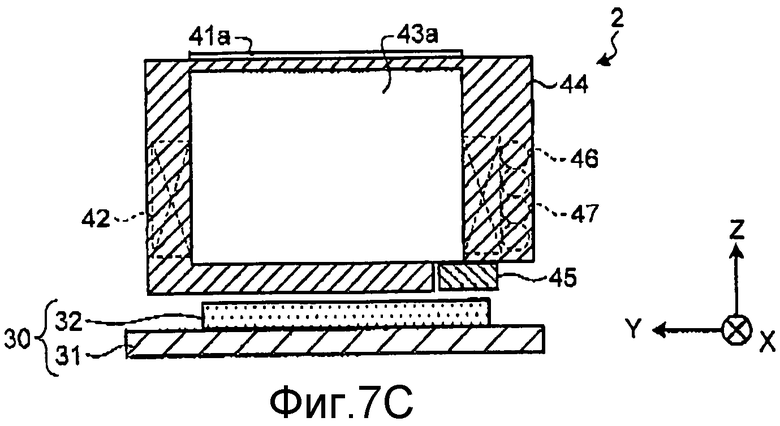
Фиг.7С изображает схематическое сечение линейного двигателя по третьему варианту настоящего изобретения.
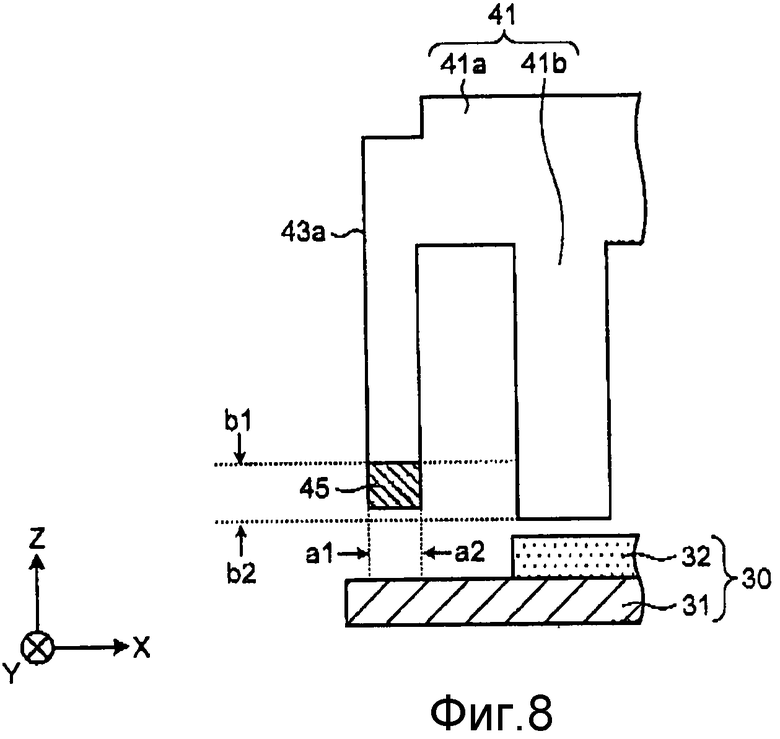
Фиг.8 изображает схематический вид, иллюстрирующий расположение опорных зубцов и устройства измерения магнитного поля.
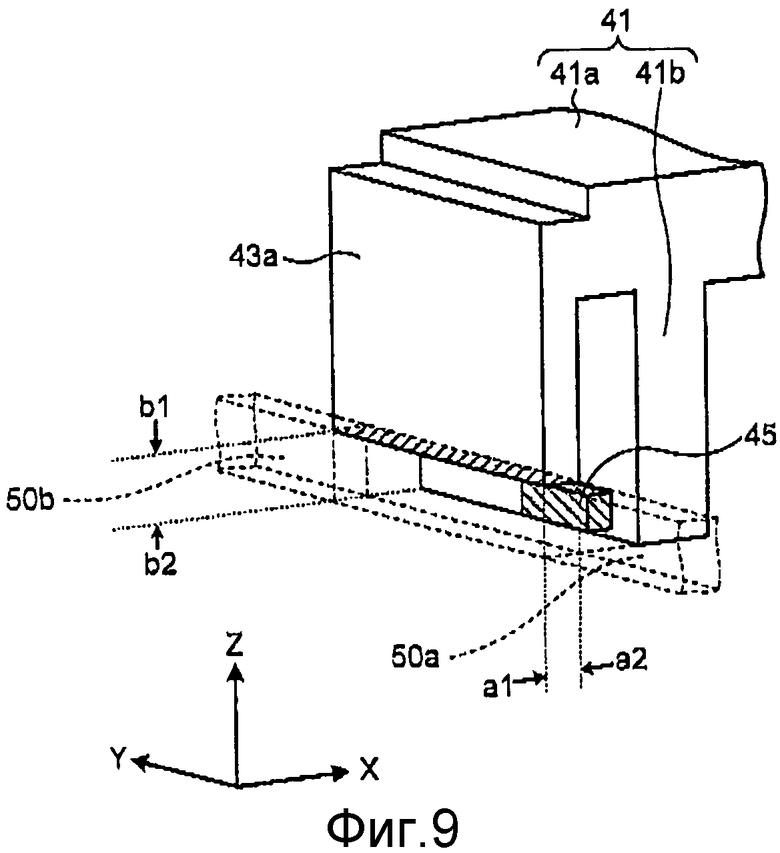
Фиг.9 изображает схематический общий вид, иллюстрирующий расположение опорных зубцов и устройства измерения магнитного поля.
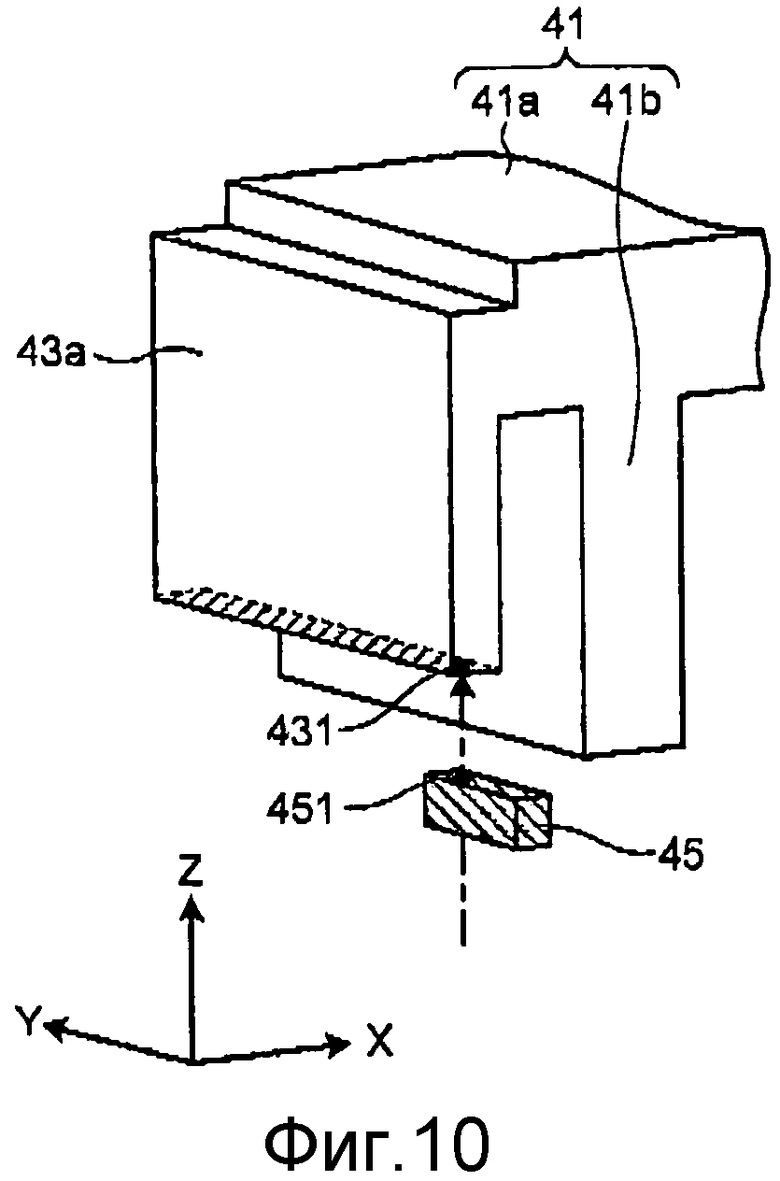
Фиг.10 изображает схему, иллюстрирующую пример места установки устройства измерения магнитного поля.
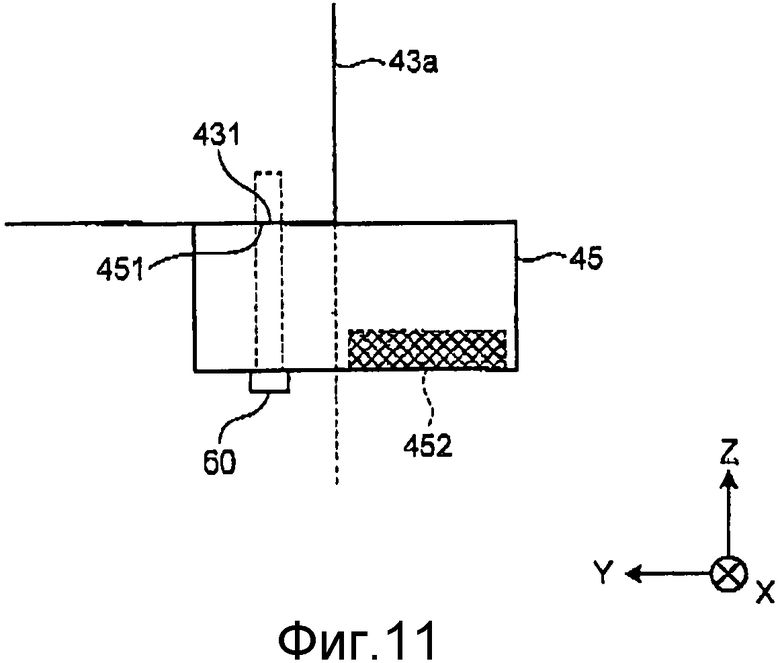
Фиг.11 изображает схему, иллюстрирующую внутреннюю конфигурацию устройства измерения магнитного поля.
Фиг.12А - схема, иллюстрирующая магнитный поток, формируемый постоянными магнитами.
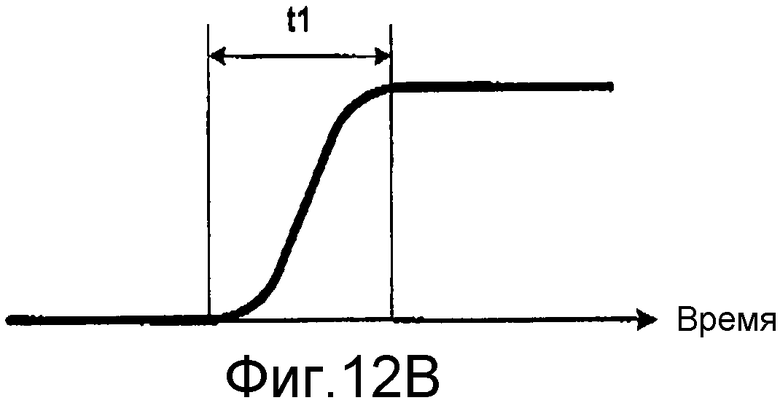
Фиг.12В изображает схему, иллюстрирующую результаты детектирования магнитного потока, показанного на фиг.12А.
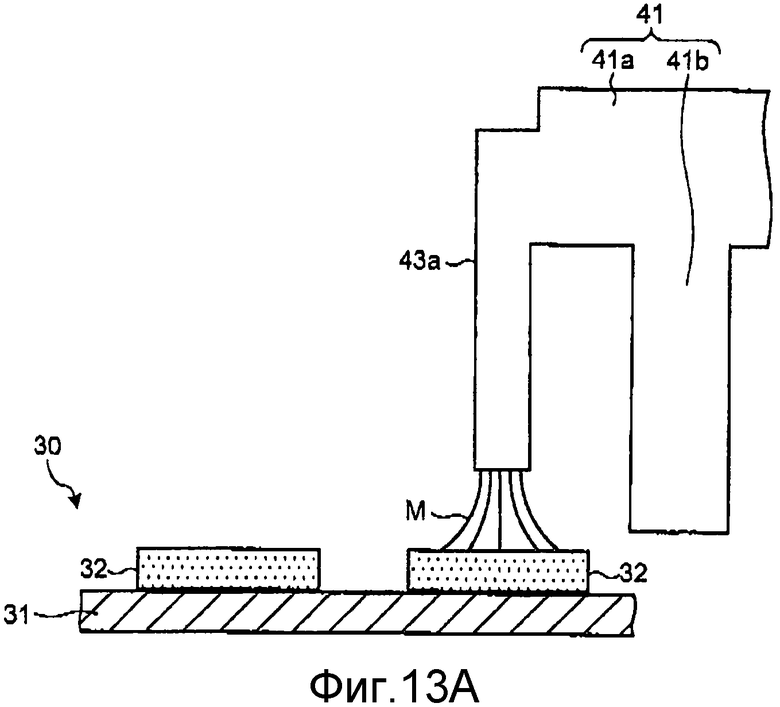
Фиг.13А изображает схему, иллюстрирующую магнитный поток, формируемый постоянным магнитом и опорными зубцами.
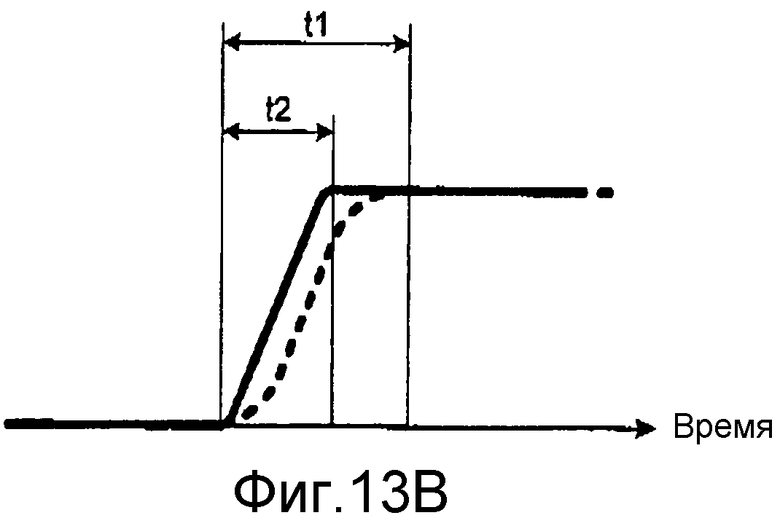
Фиг.13В изображает схему, иллюстрирующую результат детектирования магнитного потока, показанного на фиг.13А.
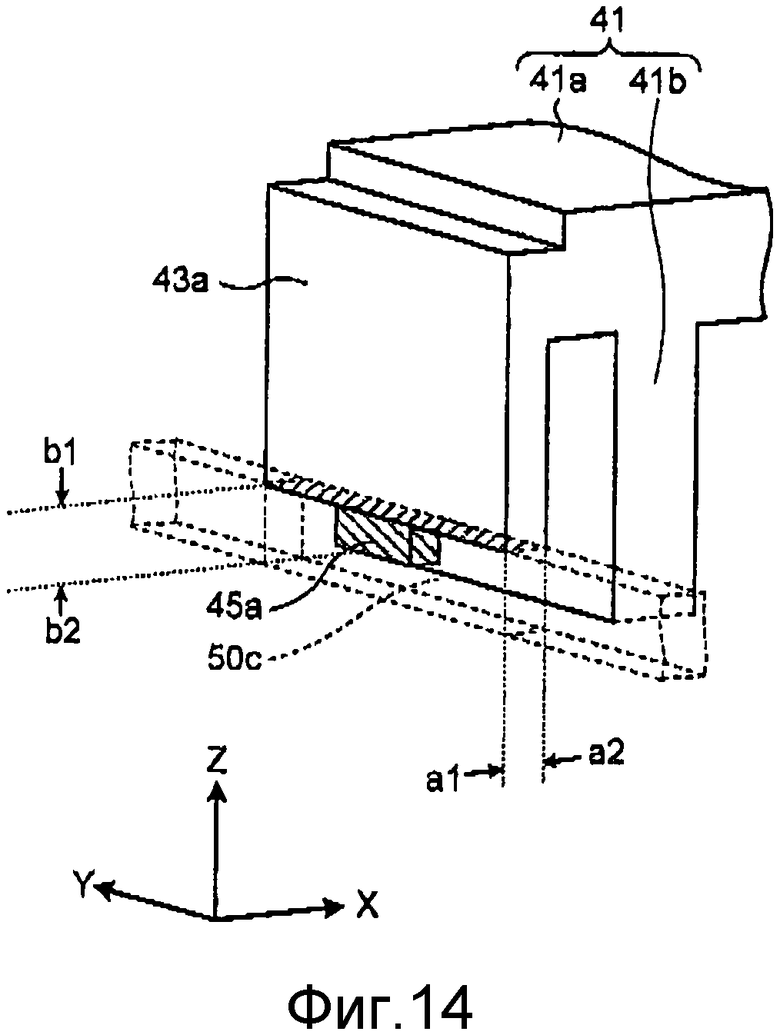
Фиг.14 изображает схематический общий вид, иллюстрирующий другой пример расположения опорных зубцов и устройства измерения магнитного поля, и
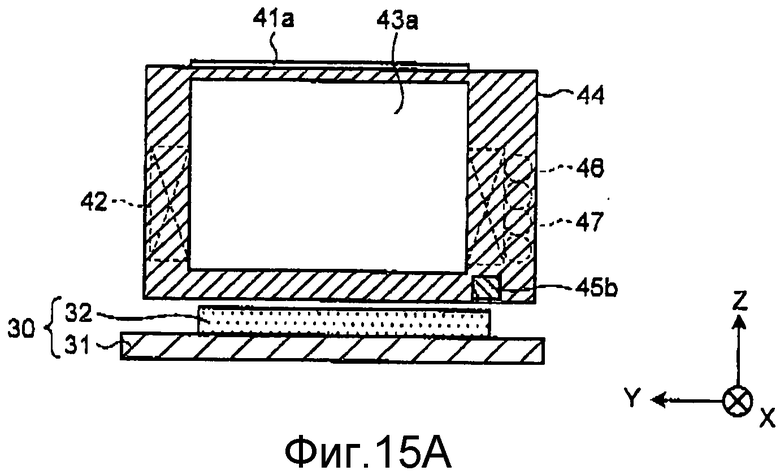
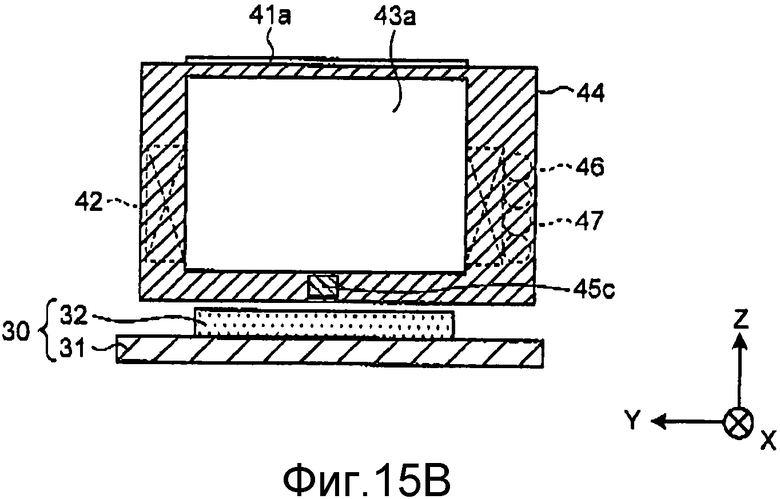
Фиг.15А и 15В изображают схематические сечения, иллюстрирующие другой пример расположения опорных зубцов и устройства измерения магнитного поля.
Описание предпочтительных вариантов воплощения
Якорь линейного электродвигателя по вариантам настоящего изобретения содержит сердечник якоря, опорные зубцы и блок детектирования. Сердечник якоря содержит основные зубцы. Опорные зубцы предусмотрены на конце сердечника якоря, который обращен в направлении рабочего хода. Блок детектирования детектирует положение сердечника якоря. Кроме того, блок детектирования предусмотрен в положении, перекрывающем опорные зубцы в направлении рабочего хода.
Линейный электродвигатель по вариантам настоящего изобретения содержит блок магнитного поля и якорь. Блок магнитного поля содержит множество магнитов, уложенных рядом друг с другом. Якорь расположен напротив блока магнитного поля. Здесь якорь содержит сердечник якоря, опорные зубцы и блок детектирования. Сердечник якоря содержит основные зубцы. Опорные зубцы выполнены на сторонах сердечника якоря, которые обращены в направлении рабочего хода. Блок детектирования детектирует положение сердечника якоря. Блок детектирования предусмотрен в положении, перекрывающем опорные зубцы в направлении рабочего хода.
Далее следует подробное описание якоря линейного электродвигателя и линейного электродвигателя по вариантам настоящего изобретения. Описываемые ниже варианты не ограничивают настоящее изобретение.
Первый вариант воплощения
Сначала со ссылками на фиг.1А-1С приводится описание общей конструкции линейного электродвигателя. На фиг.1А-1С, соответственно, приведены схематические виды сбоку и сверху и схематическое сечение первого варианта линейного электродвигателя 1. Здесь фиг.1В является схематическим видом сверху линейного электродвигателя 1 с положительного направления по оси Z. Фиг.1С является схематическим сечением по линии А-А' на фиг.1А.
Далее для описания относительного положения компонентов линейного электродвигателя могут использоваться направления вверх и вниз, вправо и влево и вперед и назад. Начало каждого направления определяется, когда линейный электродвигатель установлен на горизонтальной поверхности, как показано на фиг.1А. Более конкретно, на фиг.1А считается, что положительное и отрицательное направления по оси Х соответственно являются направлениями вперед и назад относительно линейного электродвигателя, положительное и отрицательное направления оси по Y соответственно являются направлениями влево и вправо относительно линейного электродвигателя, а положительное и отрицательное направления по оси Z соответственно являются направлениями вверх и вниз относительно линейного электродвигателя.
Как показано на фиг.1А-1С, линейный электродвигатель 1 по первому варианту настоящего изобретения содержит блок 10 магнитного поля и якорь 20. В первом варианте блок 10 магнитного поля является статором, а якорь 20 является подвижным элементом. Кроме того, количество магнитных полюсов и количество пазов не ограничено количеством, показанным на фиг.1А-1С.
Блок 10 магнитного поля содержит ярмо 11 магнитного поля и постоянные магниты 12. Ярмо 11 магнитного поля выполнено по существу прямоугольным сплошным элементом, который проходит в заранее определенном направлении (в данном случае вдоль оси Х). Ярмо 11 магнитного поля сформировано из слоев тонких пластин, например пластин из магнитной стали. Альтернативно, ярмо 11 магнитного поля может быть сформировано просто из пластинчатого материала, не имеющего слоистой структуры. Кроме того, на ярме 11 магнитного поля рядом друг с другом уложены постоянные магниты 12. В данном случае блок 10 магнитного поля содержит постоянные магниты 12. Однако блок 10 магнитного поля может содержать не постоянные магниты 12, а электромагниты.
Якорь 20 является элементом, который установлен напротив блока 10 магнитного поля с зазором и линейно перемещается вдоль этого блока 10 магнитного поля. Якорь 20 содержит сердечник 21 якоря, обмотки 22 якоря, опорные зубцы 23а и 23b, заливочную смолу 24 и блок 25 детектирования. Далее, направление движения якоря 20, т.е. положительное и отрицательное направления по оси Х, будет именоваться направлениями рабочего хода.
Сердечник 21 якоря содержит ярмо 21а, которое сформировано по существу сплошной прямоугольной формы и имеет множество основных зубцов 21b, которые выступают от ярма 21а в сторону блока 10 магнитного поля. Сердечник 21 якоря сформирован из слоев, образованных тонкими листовыми элементами, например листами магнитной стали.
Промежутки между основными зубцами 21b именуются пазами 21с. Внутренние периферийные поверхности пазов 21с закрыты изолирующими материалами, а обмотки 22 якоря, выполненные из проволоки, покрытой изоляцией, вставлены в пазы 21с. С обмотками 22 якоря соединен провод 26 питания для электродвигателя (см. фиг.1В).
Опорные зубцы 23а и 23b являются элементами, которые соответственно выполнены на обоих концах сердечника 21 якоря в направлении рабочего хода для уменьшения пульсаций, которые являются фактором изменения тягового усилия. Более конкретно, концы опорных зубцов 23а, 23b прикреплены к станине 21а, и опорные зубцы 23а и 23b выступают от концов в сторону блока 10 магнитного поля.
Как показано на фиг.1А, в первом варианте настоящего изобретения интервал между постоянными магнитами 12 и опорными зубцами 23а и 23b больше, чем интервал между постоянными магнитами 12 и основными зубцами 21b, то есть опорные зубцы 23а и 23b выполнены более короткими, чем основные зубцы 21b. Однако длина опорных зубцов 23а и 23b может быть равна длине основных зубцов 21b.
Якорь 20 по первому варианту настоящего изобретения содержит опорные зубцы 23а и 23b, каждый из которых частично срезан. Кроме того, якорь 20 по первому варианту настоящего изобретения содержит блок детектирования 25, который предусмотрен в пространстве, полученном путем среза опорных зубцов 23а и 23b, для предотвращения сокращения имеющейся длины рабочего хода. Это более конкретно описывается со ссылками на фиг.2А-2С.
Заливочная смола 24 является полимерным элементом, которым залиты сердечник 21 якоря, обмотки 22 якоря и опорные зубцы 23а и 23b. Как показано на фиг.1В и 1С, заливочная смола 24 покрывает опорные зубцы 23а и 23b и ярмо 21а так, что торец опорных зубцов 23а в отрицательном направлении по оси Y и торец ярма 21а в положительном направлении по оси Y открыты. Блок детектирования 25 предусмотрен на торце опорных зубцов 23а, не покрытых заливочной смолой 24. Это будет описано более подробно со ссылками на фиг.3А.
Блок детектирования 25 детектирует положение якоря 20 относительно блока 10 магнитного поля. В первом варианте блок детектирования 25 является блоком детектирования магнитного поля, например датчиком Холла. Линейный электродвигатель 1 управляет направлением проводимости, в котором электрические токи протекают в обмотках 22 якоря на основе результатов детектирования относительного положения якоря 20, выполняемого блоком 25 детектирования. Кроме того, с блоком 25 детектирования соединен провод 27 (см. фиг.1В).
На фиг.1В блок 25 детектирования предусмотрен в пространстве, образованном вырезом опорных зубцов 23а. В результате в линейном электродвигателе 1 по первому варианту настоящего изобретения можно предотвратить уменьшение длины рабочего хода якоря 20.
В примере по фиг.1В показано, что блок 25 детектирования предусмотрен в вырезе опорных зубцов 23а. Однако расположение блока 25 детектирования не ограничено этим вариантом. Другими словами, часть блока 25 детектирования может быть расположена вне выреза опорных зубцов 23а. Например, часть блока 25 детектирования может проходить в отрицательном направлении по оси Х на фиг.1В. Даже в этом случае, поскольку блок 25 детектирования может быть установлен в вырезе опорных зубцов 23а, можно предотвратить уменьшение длины рабочего хода якоря 20.
Далее следует конкретное описание относительного положения опорных зубцов 23а и блока 25 детектирования со ссылками на фиг.2А-2С. Фиг.2А-2С соответственно являются схематическими видами спереди и сверху и схематическим общим видом, иллюстрирующими расположение опорных зубцов 23а и блока 25 детектирования.
Как показано на фиг.2А-2С, опорные зубцы 23а содержат вырезанный участок 100а, который является участком, полученным за счет вырезания опорных зубцов 23а от одного торца до другого торца в направлении рабочего хода, то есть от одного торца в отрицательном направлении по оси Х до другого торца в положительном направлении по оси Х.
Вырезанный участок 100а выполнен открытым со стороны s1 (в отрицательном направлении по оси Z), обращенной к блоку 10 магнитного поля, со стороны s2 (в положительном направлении по оси Y), прилегающей к стороне s1, обращенной к блоку 10 магнитного поля, и со стороны s3 (в положительном направлении по оси Z), противоположной стороне s1, обращенной к блоку 10 магнитного поля. Другими словами, опорный зубец 23а имеет форму, при которой одна его половина, соответствующая его левой стороне, если смотреть с положительного направления по оси Х, срезана. Блок 25 детектирования установлен в вырезанном участке 100а опорных зубцов.
В известном якоре возникает проблема, заключающаяся в том, что диапазон перемещения подвижного элемента, т.е. длина рабочего хода, укорачивается на длину блока детектирования, когда блок детектирования установлен на конце, обращенном в направлении рабочего хода. В частности, эта проблема часто возникает, когда опорные зубцы расположены на концах сердечника якоря, обращенных в направлении рабочего хода, как в первом варианте.
Поэтому, как было описано, в первом варианте настоящего изобретения блок 25 детектирования предусмотрен в пространстве, полученном за счет выреза опорного зубца 23а. В результате элементы, не относящиеся к сердечнику 21 якоря, не занимают длину в направлении рабочего хода якоря 20, можно предотвратить сокращение рабочего хода, сохраняя в то же время тяговое усилие якоря 20.
Вырезанный участок 100а по первому варианту настоящего изобретения открывает сторону, обращенную к блоку 10 магнитного поля. Кроме того, весь блок 25 детектирования предусмотрен в вырезанном участке 100а. Поэтому точность детектирования магнитного поля, выполняемого блоком 25 детектирования не снижается.
Опорные зубцы 23а и 23b по первому варианту настоящего изобретения имеют одинаковую форму, как показано на фиг.1В, и расположены центрально-симметричным образом относительно центра сердечника 21 якоря, если смотреть с направления по оси Z. Поэтому даже если часть опорных зубцов 23а и 23b вырезана, можно сбалансированно уменьшить возникновение пульсации.
В опорных зубцах 23а и 23b их часть вырезана, и дополнительно длина, толщина и т.п. оптимизированы в соответствии с формой выреза так, чтобы эффект уменьшения пульсации не снижался из-за выреза. Поэтому можно сохранить пространство для установки блока 25 детектирования и в максимально возможной степени сохранить эффект уменьшения пульсации.
Блок 25 детектирования может быть предусмотрен в положении, удаленном от опорного зубца 23а. В результате, поскольку блок 25 детектирования не сильно подвержен влиянию опорного зубца 23а, точность измерений блока 25 детектирования повышается.
Выше было указано, что блок 25 детектирования является устройством для измерения магнитного поля. Однако блок детектирования может быть другим блоком детектирования. Например, блок 25 детектирования может быть датчиком инфракрасного излучения и т.п., который определяет положение сердечника 21 якоря, детектируя оптическим способом метки, заранее нанесенные на поверхность постоянных магнитов 12, обращенную к якорю 20.
Далее следует описание направления установки блока 25 детектирования со ссылками на фиг.3А. На фиг.3А схематически показан пример места установки блока 25 детектирования.
Блок 25 детектирования по первому варианту настоящего изобретения является унифицированным и устанавливается с возможностью съема на опорные зубцы 23а и 23b и заливается смолой 24.
Например, как показано на фиг.3А, опорный зубец 23а имеет резьбовое отверстие 231, сформированное в отрицательном направлении по оси Y от торца, свободного от заливочной смолы 24. Кроме того, в блоке 25 детектирования имеется резьбовое отверстие 251. Таким образом, блок 25 детектирования можно установить на опорном зубце 23а с помощью винта (не показан), ввинченного в резьбовое отверстие 231 опорного зубца 23а, и в резьбовое отверстие 251 блока 25 детектирования.
Таким образом, подразумевается, что блок 25 детектирования предусмотрен с возможностью съема, причем блок 25 детектирования можно легко заменять, если он, например, поврежден или откажет и, таким образом, облегчается ремонт якоря 20.
Вырезанный участок 100а опорного зубца 23а (см. фиг.2А) открывает сторону s1, обращенную к блоку 10 магнитного поля, сторону s2, прилегающую к стороне s1, обращенной к блоку 10 магнитного поля, и сторону s3, расположенную напротив стороны s1, обращенной к блоку 10 магнитного поля. Поэтому операции присоединения и отсоединения блока 25 детектирования выполняются легко.
Как показано на фиг.3А, блок 25 детектирования в опорном зубце 23а предусмотрен ближе к блоку 10 магнитного поля. В результате точность детектирования, выполняемого блоком 25 детектирования, можно повысить.
Как показано на фиг.3А, блок 25 детектирования предусмотрен на опорном зубце 23а. Однако, установка блока 25 детектирования этим не ограничивается. На фиг.3В схематически показан другой пример установки блока 25 детектирования.
Как показано на фиг.3В, блок 25 детектирования может быть предусмотрен, например, на ярме 21а. В этом случае резьбовое отверстие 212 сформировано вдоль положительного направления по оси Х от торца станины 21а, свободной от заливочной смолы 24, и в это резьбовое отверстие 212 ярма 21а и в резьбовое отверстие 251 блока 25 детектирования ввинчен винт (не показан).
Блок детектирования 25 может быть предусмотрен в состоянии, в котором он плавает в заливочной смоле 24.
Как описано выше, в первом варианте настоящего изобретения блок 25 детектирования предусмотрен в пространстве, образованном вырезом в опорном зубце 23а, поэтому имеется возможность не допустить сокращения длины рабочего хода.
Второй вариант
Вырез в опорных зубцах и установка в нем блока детектирования не ограничиваются первым вариантом настоящего изобретения. Поэтому ниже приводится описание другого примера выреза в опорных зубцах и расположения блока детектирования.
На фиг.4 и 5 приведены общие виды, иллюстрирующие другой пример расположения опорных зубцов и блока детектирования. В нижеследующем описании детали, одинаковые с уже описанными, обозначены теми же ссылочными позициями и их описание не повторяется.
Как показано на фиг.4, якорь 20а содержит опорный зубец 23а_1 вместо опорного зубца 23а по первому варианту.
Опорный зубец 23а_1 содержит вырезанный участок 100b. Вырезанный участок 100b сформирован за счет выреза опорного зубца 23а_1 от одного торца до другого торца в направлении рабочего хода, то есть от одного торца в отрицательном направлении по оси Х до другого торца в положительном направлении по оси Х, аналогично вырезанному участку 100а по первому варианту настоящего изобретения.
Вырезанный участок 100b открыт со стороны (с отрицательного направления по оси Z), обращенной к блоку 10 магнитного поля, и со стороны (с положительного направления по оси Z), противоположной стороне, обращенной к блоку 10 магнитного поля. Таким образом, опорный зубец 23а_1 имеет форму, при которой его средняя часть вырезана продольно, если смотреть с положительного направления по оси Х.
В этом случае опорный зубец 23а_1 и ярмо 21а залиты смолой (не показана) так, чтобы торцы опорного зубца 23а-1, обращенные к вырезанному участку 100b, и торец ярма 21а в направлении рабочего хода были свободны. Как и в первом варианте, блок 25 детектирования установлен с возможностью съема на торце опорного зубца 23а_1 или ярма 21а, свободном от заливочной смолы (не показана).
Хотя на чертежах это не показано, якорь 20а содержит опорный зубец, имеющий такую же форму, что и опорный зубец 23а_1 и расположенный на месте опорного зубца 23b по первому варианту. Как и в первом варианте, эти опорные зубцы расположены центрально-симметрично относительно центра сердечника 21 якоря, если смотреть с направления по оси Z. Поэтому можно сбалансированно уменьшить пульсацию.
Как показано на фиг.5, после того, как один из опорных зубцов, предусмотренных на обоих концах сердечника 21 якоря, расположенных в направлении рабочего хода, будет полностью вырезан, в вырезанное пространство в якоре 20b можно установить блок 25 детектирования.
Хотя это не показано на чертежах, в опорном зубце, расположенном в положительном направлении по оси Х, вырез отсутствует. Более конкретно, опорный зубец, расположенный на стороне, обращенной в отрицательном направлении по оси Х, имеет по существу сплошную прямоугольную форму, ширина которой в направлении по оси Y равна этой ширине основного зубца 21b.
Как показано на фиг.4 и 5, блок 25 детектирования может быть предусмотрен в состоянии, в котором он плавает в заливочной смоле 24.
Далее со ссылками на фиг.6А-6С следует описание еще одного примера расположения опорного зубца и блока детектирования. На фиг.6А-6С представлены схематические виды спереди, иллюстрирующие другой пример расположения опорного зубца и блока детектирования.
Как показано на фиг.6А, опорный зубец 23а_2 якоря 20с содержит вырезанный участок 100с, который является сквозным отверстием, проходящим от одного торца до другого в направлении рабочего хода. Таким образом, вырезанный участок 100с может быть сквозным отверстием, в котором и сторона в направлении оси Z, и стороны в направлении оси Y закрыты. Блок 25 детектирования предусмотрен в вырезанном участке 100с.
Как показано на фиг.6В, опорный зубец 23а_3 якоря 20d содержит вырезанной участок 100d. Вырезанный участок 100d выполнен путем вырезания опорного зубца от одного торца до другого торца в направлении рабочего хода так, чтобы сторона (в отрицательном направлении по оси Z), обращенная к блоку 10 магнитного поля, была открыта. Таким образом, вырезанный участок 100d может иметь форму, при которой открыта только одна сторона, обращенная к блоку 10 магнитного поля. Блок 25 детектирования предусмотрен в вырезанном участке 100d.
Как показано на фиг.6С, опорный зубец 23а_4 якоря 20е имеет вырезанный участок 100е. Вырезанный участок 100е сформирован путем выреза опорного зубца от одного торца до другого торца в направлении рабочего хода так, чтобы была открыта сторона (в отрицательном направлении по оси Z), обращенная к блоку 10 магнитного поля, и сторона (в положительном направлении по оси Y), прилегающая к стороне, обращенной к блоку 10. Таким образом, вырезанный участок 100е может иметь форму, в которой открыты только сторона, обращенная к блоку 10 магнитного поля, и сторона, прилегающая к стороне, обращенной к блоку 10 магнитного поля.
Выше было показано, что в первом и втором вариантах в якоре используется блок 25 детектирования. Однако вместо блока 25 детектирования можно использовать блок детектирования магнитного поля, который является элементом блока, включающего в себя блок 25 детектирования.
Третий вариант
Далее со ссылками на фиг.7А-7С следует описание всей конфигурации линейного электродвигателя. На фиг.7А-7С соответственно приведены схематические виды сбоку и сверху и схематическое сечение линейного электродвигателя 2 по третьему варианту настоящего изобретения. На фиг.7В представлен схематический вид сверху линейного электродвигателя, показанного на фиг.7А, если смотреть с положительного направления по оси Z. На фиг.7С приведено поперечное сечение по линии B-B' на фиг.7А.
Далее, для пояснения относительных положений компонентов линейного электродвигателя могут использоваться направления вверх и вниз, влево и вправо, и вперед и назад. Начало каждого направления определяется, когда линейный электродвигатель установлен на горизонтальной поверхности, как показано на фиг.7А. Более конкретно, на фиг.7А считается что положительное и отрицательное направления по оси Х соответственно являются направлениями вперед и назад относительно линейного электродвигателя, положительное и отрицательное направления по оси Y соответственно являются направлениями влево и вправо относительно линейного электродвигателя, а положительное и отрицательное направления по оси Z соответственно являются направлениями вверх и вниз относительно линейного электродвигателя.
Как показано на фиг.7А-7С, линейный электродвигатель 2 по третьему варианту настоящего изобретения содержит блок 30 магнитного поля и якорь 40. В третьем варианте, как будет описано ниже, блок 30 магнитного поля является статором, а якорь 40 является подвижным элементом. Кроме того, количество магнитных полюсов и количество пазов не ограничены количествами, показанными на фиг.7А-7С.
Блок 30 магнитного поля содержит станину 31 и постоянные магниты 32. Станина 31 является по существу сплошным прямоугольным элементом, который проходит в заранее определенном направлении (в данном случае вдоль оси Х). Станина 31 сформирована из слоев тонких пластин. Однако станина 31 может быть сформирована просто как пластина материала, не имеющего слоистой структуры. Кроме того, постоянные магниты 32 уложены на станине 31 рядом друг с другом. В данном случае блок 30 магнитного поля содержит постоянные магниты 32. Однако блок 30 магнитного поля может содержать не постоянные магниты 32, а электромагниты.
Якорь 40 является элементом, который установлен напротив блока 30 магнитного поля с зазором и линейно перемещается вдоль блока 30 магнитного поля. Якорь 40 содержит сердечник 41 якоря, обмотки 42 якоря, опорные зубцы 43а и 43b, заливочную смолу 44 и блок 45 детектирования магнитного поля. Далее направление движения якоря 40, т.е. положительное и отрицательное направления по оси Х, в некоторых случаях будет именоваться направлением рабочего хода.
Сердечник 41 якоря содержит ярмо 41а, которое выполнено в форме по существу сплошного прямоугольника, и множество основных зубцов 41b, которые выступают из станины 41а в сторону блока 30 магнитного поля. Сердечник 41 якоря выполнен слоистым из тонких пластинчатых элементов, например листов магнитной стали.
Пространства между основными зубцами 41b именуются пазами 41с. Внутренние периферийные поверхности пазов 41с покрыты изолирующим материалом, а обмотки 42 якоря, выполненные из проволоки, покрытой изоляцией, вставлены в пазы 41с. С обмотками 42 якоря соединен провод 46 питания для электродвигателя (см. фиг.7В).
Опорные зубцы 43а и 43b являются элементами, которые соответственно расположены на обоих концах сердечника 41 якоря в направлении рабочего хода для уменьшения пульсаций момента, которые являются фактором изменения тягового усилия. Более конкретно, концы опорных зубцов 43а и 43b прикреплены к ярму 41а и выступают от концов в сторону блока 30 магнитного поля.
Как показано на фиг.7А, промежуток между постоянными магнитами 32 и опорными зубцами 43а и 43b больше, чем промежуток между постоянными магнитами 32 и основными зубцами 41b. Другими словами, длина опорных зубцов 43а м 43b в направлении вверх-вниз меньше, чем эта длина основных зубцов 41b. Поэтому якорь 40 имеет избыточное пространство, в котором расположены основные зубцы 41b, обмотки 42 якоря, и опорный зубец 43а, между торцами (или нижней и верхней сторонами опорных зубцов 43а и 43b) опорных зубцов 43а и 43b, обращенными к блоку 30 магнитного поля (или нижней и верхней сторонами основных зубцов 41b) основных зубцов 43b, обращенных к устройству 30 для создания магнитного поля.
Заливочная смола 44 является смолистым элементом, полученным заливкой смолы в сердечник 41 якоря, обмотки 42 якоря и опорные зубцы 43а и 43b. Как показано на фиг.7В и 7С, заливочная смола покрывает опорный зубец 43а так, чтобы по меньшей мере часть нижнего торца опорного зубца 43а была свободна. Блок 45 детектирования магнитного поля предусмотрен на торце опорного зубца 43а, не покрытого смолой 44. Это более подробно описано ниже со ссылками на фиг.9.
Блок 45 детектирования магнитного поля является элементом блока, содержащим блок детектирования, который детектирует положение якоря 40 относительно блока 30 магнитного поля. Блок детектирования по третьему варианту настоящего изобретения является блоком детектирования магнитного поля, например датчиком Холла. Линейный двигатель 2 управляет направлением проводимости, в котором токи протекают по обмоткам 42 якоря на основе результатов детектирования относительного положения якоря 40, выполняемого блоком 45 детектирования магнитного поля. Кроме того, с блоком 45 детектирования магнитного поля соединен провод 47 (см. фиг.7В).
Линейный электродвигатель 2 по третьему варианту настоящего изобретения позволяет предотвратить сокращение длины рабочего хода якоря 40 за счет установки блока 45 детектирования магнитного поля в избыточном пространстве между нижним торцом опорного зубца 43а и нижним торцом основного зубца 41b.
Далее со ссылками на фиг.8 и 9 следует описание расположения опорного зубца 43а и блока 45 детектирования магнитного поля. На фиг.8 приведен схематический вид, иллюстрирующий положение опорного зубца 43а и блока 45 детектирования магнитного поля. На фиг.9 приведен схематический общий вид, иллюстрирующий положение опорного зубца 43а и блока 45 детектирования магнитного поля.
Как показано на фиг.8, блок 45 детектирования магнитного поля расположен в пространстве, окруженном областью, проходящей от одного торца до другого торца опорного зубца 43а в направлении рабочего хода (от а1 до а2), и областью, проходящей от поверхности опорного зубца 43а, обращенной к блоку 30 магнитного поля, до поверхности основного зубца 41b, обращенной к блоку 30 магнитного поля (от b1 до b2).
В известном якоре возникает проблема, заключающаяся в том, что доступная длина рабочего хода сокращается на длину блока детектирования, установленного на конце якоря, расположенном в направлении рабочего хода. Более конкретно, эта проблема возникает, когда опорные зубцы расположены на концах сердечника якоря в направлении рабочего хода, как в третьем варианте настоящего изобретения.
Поэтому в третьем варианте настоящего изобретения блок 45 детектирования магнитного поля предусмотрен в пространстве между нижними торцами опорных зубцов 43а и 43b и нижними торцами основных зубцов 41b. В результате, поскольку элементы, не являющиеся сердечником 41 якоря, не занимают длину якоря 40 в направлении рабочего хода, можно предотвратить уменьшение доступного рабочего хода, в то же время сохраняя тяговое усилие якоря 40.
Как было показано выше, блок 45 детектирования магнитного поля установлен в пространстве (от а1 до а2), проходящем от одного торца до другого торца опорного зубца 43а в направлении рабочего хода. Однако блок 45 детектирования магнитного поля может частично выступать за пределы этого пространства.
Как показано на фиг.9, устройство 45 для измерения магнитного поля установлено так, что блок детектирования, предусмотренный в нем, расположен в пространстве 50а справа от опорного зубца 43а и установлен на опорном зубце 43а в пространстве снизу (50с на фиг.14) от опорного зубца 43а.
Далее, со ссылками на фиг.10 и 11 следует описание установки блока 45 детектирования магнитного поля на опорном зубце 43а и внутренней конфигурации блока 45 детектирования магнитного поля. На фиг.10 показана схематическая иллюстрация примера установки блока 45 детектирования магнитного поля. На фиг.11 приведена схематическая иллюстрация внутренней конфигурации блока 45 детектирования магнитного поля.
Например, как показано на фиг.10, в опорном зубце 43а выполнено резьбовое отверстие 431, проходящее в положительном направлении по оси Z от нижнего торца, не покрытого смолой 44. Кроме того, в блоке 45 детектирования магнитного поля выполнено резьбовое отверстие 451, находящееся в положении, соответствующем нижней стороне опорного зубца 43а. Как показано на фиг.11, блок 45 детектирования магнитного поля установлен на опорном зубце 43а с помощью винта 60, входящего в резьбовое отверстие 431 опорного зубца 43а и в резьбовое отверстие 451 блока 45 детектирования магнитного поля.
Таким образом, подразумевается, что блок 45 детектирования магнитного поля установлен с возможностью съема на сердечнике 41 якоря и залитом смолой опорном зубце 43а, причем блок 45 детектирования магнитного поля можно легко заменить, например, когда он поврежден или отказывает, и, таким образом, облегчается ремонт якоря 40.
Как показано на фиг.11, блок 452 детектирования, включенный в блок 45 детектирования магнитного поля, установлен на правой стороне опорного зубца 43а. Более конкретно, блок детектирования 452 расположен снаружи от опорного зубца 43а в направлении (по оси Y), перпендикулярном направлению рабочего хода (по оси Х) и направлению (по оси Z), в котором опорный зубец 43а обращен к блоку 30 магнитного поля.
Таким образом, можно соответственно исключить нестабильность точности детектирования магнитного поля блоком 452 детектирования, расположив блок 452 детектирования вне опорного зубца 43а.
Другими словами, когда блок 452 детектирования частично расположен под опорным зубцом 43а, этот блок 452 детектирования частично попадает под влияние опорного зубца 43а и, поэтому, точность измерения магнитного поля, выполняемого блоком 452 детектирования, может быть нестабильной. С учетом этого блок 452 детектирования полностью расположен под опорным зубцом 43а. В этом случае блок 452 детектирования невозможно установить в пространстве (от а1 до а2 на фиг.8) от одного торца до другого торца опорного зубца 43а в направлении рабочего хода. В результате это приводит к тому, что блок 452 детектирования устанавливают частично под опорным зубом 43а.
Следовательно, нестабильность точности детектирования магнитного поля, выполняемого блоком 452 детектирования, можно исключить, обеспечив блок 452 детектирования за пределами опорного зубца 43а.
В третьем варианте настоящего изобретения, как показано на фиг.7С, постоянный магнит 32 доходит до положения, обращенного к блоку 452 детектирования. Другими словами, поскольку постоянный магнит 32 по существу находится под опорным зубцом 43а, блок 452 детектирования удален от постоянного магнита 32 и точность измерений может снизиться, когда блок 452 детектирования установлен вне опорного зубца 43а.
Поэтому ухудшение точности измерений можно было бы предотвратить, продолжив постоянный магнит 32 до положения, обращенного к блоку 452 детектирования. Однако постоянный магнит 32 продолжить нельзя.
Якорь 40 по третьему варианту настоящего изобретения может повысить точность измерения магнитного поля, выполняемого блоком 452 детектирования, за счет установки блока 452 детектирования рядом с опорным зубцом 43а. Это поясняется со ссылками на фиг.12А-13В.
На фиг.12А показана схема, иллюстрирующая магнитный поток, формируемый постоянными магнитами 32. На фиг.13А представлена схема, иллюстрирующая магнитный поток, формируемый постоянным магнитом 32 и опорным зубцом 43а. На фиг.12В показан результат детектирования магнитного потока, показанного на фиг.12А. На фиг.13В показан результат детектирования магнитного потока, показанного на фиг.13А. На фиг.13В результат детектирования по фиг.12В показан штриховой линией. Предполагается, что якорь 40 имеет одинаковую скорость движения и для результатов, показанных сплошной линией, и для результатов, показанных штриховой линией.
Как показано на фиг.12А, магнитный поток М, сформированный постоянными магнитами 32, описывает постоянную параболу от одного (северного полюса) из постоянных магнитов 32 к другому (южному полюсу) из постоянных магнитов 32. Результат детектирования магнитного потока М, измеренного блоком 452 детектирования, имеет относительно плавно поднимающийся фронт, как показано на фиг 12В (см. t1 на фиг 12В).
С другой стороны, как показано на фиг.13А, выходящий из постоянного магнита 32 магнитный поток М поглощается опорным зубцом 43а, когда опорный зубец 43а расположен рядом с постоянным магнитом 32. Поэтому плотность магнитного потока рядом с опорным зубцом 43а повышается по сравнению с плотностью магнитного потока на фиг.12А.
Блок 452 детектирования, являющийся устройством измерения магнитного потока, в качестве результата измерений выдает выходной сигнал в форме выходного напряжения, пропорционального плотности магнитного потока. Следовательно, как показано на фиг.13В, результат детектирования магнитного поля, выполняемого блоком 452 детектирования, имеет крутой восходящий фронт по сравнению с результатом измерений на фиг.12В. Другими словами, как показано на фиг.13В, разница во времени между прохождением магнитного полюса блока 452 детектирования и выводом результата детектирования блока 452 детектирования сокращается, когда опорный зубец 43а находится рядом с постоянным магнитом 32 по сравнению со случаем, когда опорный зубец 43а не находится рядом с постоянным магнитом 32 (см. t1 и t2 на фиг.13В).
Следовательно, разница во времени уменьшается за счет того, что блок 452 детектирования блока 45 детектирования магнитного поля расположен рядом с опорным зубцом 43а и, поэтому, точность детектирования магнитного поля, выполняемого блоком 452 детектирования, можно повысить.
Как описано выше, в третьем варианте настоящего изобретения блок детектирования расположен в пространстве, проходящем от одного торца опорного зубца до другого его торца в направлении рабочего хода, и в пространстве от поверхности опорного зубца, обращенной к блоку магнитного поля, до поверхности основных зубцов, обращенных к блоку магнитного поля. Поэтому можно предотвратить сокращение длины рабочего хода якоря.
Кроме того, в третьем варианте настоящего изобретения блок детектирования расположен вне опорного зубца в направлении, перпендикулярном направлению рабочего хода и направлению, в котором опорный зубец обращен к блоку магнитного поля. Следовательно, нестабильность точности детектирования магнитного поля, выполняемого блоком детектирования, можно соответственно предотвратить.
Пространство, в котором установлен блок детектирования, не ограничено случаем, описанным в третьем варианте. Более конкретно, достаточно того, чтобы пространство, в котором установлен блок детектирования или его часть, было пространством (расположенным ближе к сердечнику якоря, чем а1, показанное на фиг.8), расположенным ближе к стороне сердечника якоря, чем поверхность, не обращенная к якорю, из поверхностей опорного зубца в направлении рабочего хода, а также пространством (расположенным ближе к блоку магнитного поля, чем b1, показанное на фиг.8), которое расположено ближе к стороне блока магнитного поля, чем поверхность опорного зубца, обращенная к блоку магнитного поля. Следовательно, блок детектирования можно устанавливать между опорным зубцом и устройством для создания магнитного поля, если смотреть в направлении оси Y на фиг.8.
Кроме того, в третьем варианте устройство для измерения магнитного поля расположено в пространстве с правой стороны (в пространстве 50а, показанном на фиг.8) опорного зубца. Однако устройство для детектирования магнитного поля может быть установлено в пространстве с левой стороны (пространство 50b на фиг.9) опорного зубца.
Четвертый вариант
Взаимное расположение опорных зубцов и блока детектирования магнитного поля не ограничивается третьим вариантом настоящего изобретения. Поэтому далее следует описание четвертого варианта взаимного расположения опорных зубцов и блока детектирования магнитного поля.
На фиг.14 схематически показан другой пример расположения опорного зубца и блока детектирования магнитного поля. В нижеследующем описании детали, совпадающие с уже описанными выше, обозначены теми же позициями и их описание не повторяется.
Как показано на фиг.14, как и блок 45 детектирования магнитного поля в третьем варианте настоящего изобретения, блок 45а детектирования магнитного поля по четвертому варианту предусмотрен в избыточном пространстве между нижним торцом опорного зубца 43а и нижним торцом основного зубца 41b.
Более конкретно, блок 45а детектирования магнитного поля предусмотрен в пространстве, окруженном областью, проходящей от одного торца до другого торца опорного зубца 43а в направлении рабочего хода (от а1 до а2), и областью, проходящей от поверхности опорного зубца 43а, обращенной к блоку 30 магнитного поля, до поверхности основного зуба 41b, обращенной к блоку 30 магнитного поля (от b1 до b2).
Блок 45а детектирования магнитного поля по четвертому варианту настоящего изобретения предусмотрен в пространстве 50с, находящемся под опорным зубом 43а.
Таким образом, блок 45а детектирования магнитного поля может находиться в пределах опорного зубца 43а в направлении, перпендикулярном направлению рабочего хода и направлению, в котором опорный зубец 43а обращен к блоку 30 магнитного поля.
В частности, когда блок 45а детектирования магнитного поля установлен в пространстве (от а1 до а2), проходящем от одного торца до другого торца опорного зубца 43а в направлении рабочего хода, точность детектирования магнитного поля, выполняемого блоком 452 детектирования, может быть стабильной, даже если он предусмотрен в пространстве 50с.
Как и блок 45 детектирования магнитного поля по третьему варианту настоящего изобретения, блок 45а детектирования магнитного поля по четвертому варианту предусмотрен с возможностью съема относительно сердечника 41 якоря и опорного зубца 43а, которые залиты смолой.
Выше было описано, что в вариантах настоящего изобретения блок детектирования магнитного поля предусмотрен с возможностью съема относительно сердечника якоря и опорного зубца, которые залиты смолой. Однако настоящее изобретение не ограничено этими вариантами. Другими словами, устройство для измерения магнитного поля может быть залито смолой вместе с сердечником якоря и опорным зубом. Далее это поясняется со ссылками на фиг.15А и 15В. На фиг.15А и 15В представлены схематические виды в сечении, иллюстрирующие взаимное расположение опорных зубцов и блока детектирования магнитного поля.
Как показано на фиг.15А и 15В, блоки 45b или 45c могут быть предусмотрены так, чтобы не контактировать с опорным зубом 43а, более конкретно так, чтобы они плавали в заливочной смоле 44. На фиг.15А показан случай, когда блок 45b детектирования магнитного поля расположен на правой стороне опорного зубца 43а. На фиг.15В показан случай, когда блок 45с детектирования магнитного поля расположен под опорным зубом 43а.
Выше было указано, что блок детектирования является блоком детектирования магнитного поля. Однако блок детектирования может быть блоком, не являющимся блоком детектирования магнитного поля. Например, блок детектирования может быть датчиком инфракрасного излучения или подобным, который измеряет относительное положение сердечника якоря путем оптического считывания меток, заранее нанесенных на поверхность постоянных магнитов, обращенную к якорю.
Выше указывалось, что опорный зубец сформирован совместно с сердечником якоря. Однако опорный зубец можно формировать отдельно от сердечника якоря.
Выше было показано, что в третьем и четвертом вариантах настоящего изобретения используется блок детектирования магнитного поля. Однако можно использовать только блок детектирования.
В связи с вариантами настоящего изобретения были описаны следующие аспекты:
(1) Якорь линейного электродвигателя включает в себя: сердечник якоря, содержащий основные зубцы; опорные зубцы, предусмотренные на концах сердечника якоря, обращенных в направлении рабочего хода; и блок детектирования, который детектирует положение сердечника якоря. Блок детектирования предусмотрен в пространстве, полученном путем создания выреза в опорном зубце.
(2) Якорь линейного электродвигателя по п.(1), в котором опорный зубец содержит вырез, полученный путем выреза опорного зубца от одного торца до другого торца в направлении рабочего хода.
(3) Якорь линейного электродвигателя по п.(2), в котором вырезанный участок открыт со стороны, обращенной к блоку магнитного поля, который содержит множество магнитов, уложенных рядом друг с другом.
(4) Якорь линейного электродвигателя по п.(3), в котором вырезанный участок дополнительно открыт с одной из сторон, прилегающих к стороне, обращенной к блоку магнитного поля.
(5) Якорь линейного электродвигателя по п.(3) или (4), в котором вырезанный участок дополнительно открыт со стороны, противоположной стороне, обращенной к блоку магнитного поля.
(6) Якорь линейного электродвигателя по любому из пп.(1)-(5), в котором опорные зубцы имеют одинаковую форму и соответственно предусмотрены на обоих концах сердечника якоря в направлении рабочего хода центрально-симметричным образом относительно центра сердечника якоря.
(7) Якорь линейного электродвигателя по п.(1), в котором опорные зубцы соответственно предусмотрены на обоих концах сердечника якоря в направлении рабочего хода и один из опорных зубцов вырезан.
(8) Якорь линейного электродвигателя по любому из пп.(1)-(7), в котором блок детектирования предусмотрен с возможностью съема на сердечнике якоря и опорном зубе, которые залиты смолой.
(9) Линейный электродвигатель, содержащий блок магнитного поля, содержащий множество магнитов, уложенных рядом друг с другом; и якорь, предусмотренный напротив блока магнитного поля. Якорь содержит: сердечник якоря, который содержит основные зубцы; опорные зубцы, предусмотренные на концах в направлении рабочего хода сердечника якоря; и блок детектирования, который детектирует положение сердечника якоря. Блок детектирования предусмотрен в пространстве, полученном путем создания выреза опорного зубца.
(10) Якорь линейного электродвигателя, расположенный напротив блока магнитного поля, имеющего множество магнитов, уложенных рядом друг с другом, при этом якорь содержит: сердечник якоря, содержащий основные зубцы; опорные зубцы, предусмотренные на концах сердечника якоря в направлении рабочего хода; и блок детектирования, который детектирует положение сердечника якоря. Блок детектирования предусмотрен в пространстве, которое находится ближе к сердечнику якоря, чем та поверхность опорного зубца, которая не обращена к сердечнику якоря, из поверхностей опорного зубца в направлении рабочего хода, и в пространстве, которое ближе к блоку магнитного поля, чем поверхность опорного зубца, которая обращена к блоку магнитного поля.
(11) Якорь линейного электродвигателя по п.(10), в котором блок детектирования расположен вне опорного зубца в направлении, перпендикулярном направлению рабочего хода и направлению, в котором опорный зубец обращен к блоку магнитного поля.
(12) Якорь линейного электродвигателя по п.(10), в котором блок детектирования расположен в пределах опорного зубца в направлении, перпендикулярном направлению рабочего хода и направлению, в котором опорный зубец обращен к блоку магнитного поля.
(13) Якорь линейного электродвигателя по любому из пп.(1), (2) или (3), в котором блок детектирования предусмотрен с возможностью съема относительно сердечника якоря и опорного зубца, которые залиты смолой.
(14) Линейный электродвигатель, содержащий: блок магнитного поля, имеющий множество магнитов, уложенных рядом друг с другом; и якорь, расположенный напротив блока магнитного поля. Якорь содержит сердечник якоря, содержащий основные зубцы; опорные зубцы, расположенные на концах сердечника в направлении рабочего хода; и блок детектирования, который детектирует положение сердечника якоря. Блок детектирования предусмотрен в пространстве, которое находится ближе к сердечнику якоря, чем та поверхность опорного зубца, которая не обращена к сердечнику якоря из поверхностей опорного зубца в направлении рабочего хода, и в пространстве, которое находится ближе к блоку магнитного поля, чем поверхность опорного зубца, которая обращена к блоку магнитного поля.
(15) Линейный электродвигатель по п.(14), в котором блок детектирования предусмотрен вне опорного зубца в направлении, перпендикулярном направлению рабочего хода и направлению, в котором опорный зубец обращен к блоку магнитного поля, и магнит блока магнитного поля проходит до положения, обращенного к блоку детектирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1999 |
|
RU2219641C2 |
| Линейный шаговый электродвигатель | 1981 |
|
SU989699A1 |
| Линейный вентильный электродвигатель | 2020 |
|
RU2750646C1 |
| Линейный шаговый электродвигатель | 1987 |
|
SU1432680A1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2366064C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2004 |
|
RU2275732C2 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2366066C1 |
| Линейный шаговый электродвигатель | 1986 |
|
SU1376184A1 |
| Линейный шаговый электродвигатель | 1990 |
|
SU1767639A1 |
| Линейный электродвигатель | 1987 |
|
SU1515278A1 |

Изобретение относится к линейным двигателям. Технический результат состоит в исключении влияния блока детектирования на рабочий ход якоря. Якорь линейного электродвигателя содержит сердечник якоря, опорные зубцы и блок детектирования. Сердечник якоря содержит основные зубцы. Опорные зубцы предусмотрены на концах сердечника якоря в направлении рабочего хода. Блок детектирования детектирует положение сердечника якоря. Кроме того, блок детектирования предусмотрен в положении, перекрывающем опорный зубец в направлении рабочего хода. 2 н. и 20 з.п. ф-лы, 15 ил.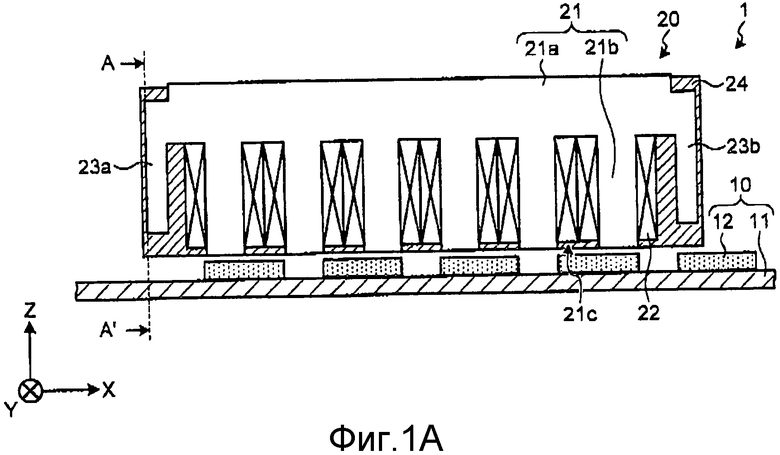
1. Якорь линейного электродвигателя, содержащий: сердечник якоря, который включает в себя основные зубцы; добавочные зубцы, предусмотренные на концах сердечника якоря в направлении рабочего хода, которые снижают пульсации, которые являются фактором изменения тягового усилия; и блок детектирования, который детектирует положение сердечника якоря и обеспеченный в пространстве, которое получено путем создания выреза добавочного зубца.
2. Якорь по п.1, в котором добавочный зубец включает в себя вырезанный участок, полученный путем создания выреза добавочного зубца от одного торца до другого торца в направлении рабочего хода.
3. Якорь по п.2, в котором вырезанный участок открыт со стороны, обращенной к блоку магнитного поля, который включает в себя множество магнитов, уложенных рядом друг с другом.
4. Якорь по п.3, в котором вырезанный участок дополнительно открыт с одной из сторон, прилегающих к стороне, обращенной в сторону блока магнитного поля.
5. Якорь по п.3, в котором вырезанный участок дополнительно открыт со стороны, противоположной стороне, обращенной к блоку магнитного поля.
6. Якорь по п.4, в котором вырезанный участок дополнительно открыт со стороны, противоположной стороне, обращенной к блоку магнитного поля.
7. Якорь по п.1, в котором добавочные зубцы имеют одинаковую форму и предусмотрены соответственно на обоих концах сердечника якоря в направлении рабочего хода симметрично относительно центра сердечника якоря.
8. Якорь по п.2, в котором добавочные зубцы имеют одинаковую форму и предусмотрены соответственно на обоих концах сердечника якоря в направлении рабочего хода симметрично относительно центра сердечника якоря.
9. Якорь по п.3, в котором добавочные зубцы имеют одинаковую форму и предусмотрены соответственно на обоих концах сердечника якоря в направлении рабочего хода симметрично относительно центра сердечника якоря.
10. Якорь по п.4, в котором добавочные зубцы имеют одинаковую форму и предусмотрены соответственно на обоих концах сердечника якоря в направлении рабочего хода симметрично относительно центра сердечника якоря.
11. Якорь по п.5, в котором добавочные зубцы имеют одинаковую форму и предусмотрены соответственно на обоих концах сердечника якоря в направлении рабочего хода симметрично относительно центра сердечника якоря.
12. Якорь по п.6, в котором добавочные зубцы имеют одинаковую форму и предусмотрены соответственно на обоих концах сердечника якоря в направлении рабочего хода симметрично относительно центра сердечника якоря.
13. Якорь по п.1, в котором добавочные зубцы предусмотрены соответственно на обоих концах сердечника якоря в направлении рабочего хода и один из добавочных зубцов полностью срезан.
14. Якорь по любому из пп.1-13, в котором блок детектирования предусмотрен с возможностью отсоединения на залитых смолой сердечнике якоря и добавочном зубце.
15. Якорь по п.1, в котором сердечник якоря и добавочные зубцы расположены напротив блока магнитного поля, включающего в себя множество магнитов, уложенных рядом друг с другом, и блок детектирования предусмотрен в пространстве, ограниченном областью, которая ближе к сердечнику якоря, чем поверхность добавочного зубца, которая не обращена к сердечнику якоря, из поверхностей добавочных зубцов в направлении рабочего хода, и областью, которая расположена ближе к блоку магнитного поля, чем поверхность добавочного зубца, обращенная к блоку магнитного поля.
16. Якорь по п.15, в котором блок детектирования предусмотрен снаружи от добавочного зубца в направлении, перпендикулярном направлению рабочего хода и направлению, в котором добавочный зубец обращен к блоку магнитного поля.
17. Якорь по п.15, в котором блок детектирования предусмотрен в пределах добавочного зубца в направлении, перпендикулярном направлению рабочего хода, и направлению, в котором добавочный зубец обращен к блоку магнитного поля.
18. Якорь по любому из пп.15-17, в котором блок детектирования предусмотрен с возможностью отсоединения на залитых смолой сердечнике якоря и добавочном зубце.
19. Линейный электродвигатель, содержащий: блок магнитного поля, включающий в себя множество магнитов, уложенных рядом друг с другом; и якорь, установленный напротив блока магнитного поля; при этом якорь содержит: сердечник якоря, который содержит основные зубцы; добавочные зубцы, предусмотренные на концах в направлении рабочего хода сердечника якоря, которые снижают пульсации, которые являются фактором изменения тягового усилия; и блок детектирования, который детектирует положение сердечника якоря и предусмотренный в пространстве, которое получено путем создания выреза добавочного зубца.
20. Линейный электродвигатель по п.19, в котором блок детектирования предусмотрен в пространстве, полученном путем выполнения выреза добавочного зубца.
21. Линейный электродвигатель по п.19, в котором сердечник якоря и добавочные зубцы расположены напротив блока магнитного поля, который включает в себя множество магнитов, уложенных рядом друг с другом, и блок детектирования, предусмотренный в пространстве, расположенном ближе к сердечнику якоря, чем поверхность добавочного зубца, которая не обращена к сердечнику якоря, из поверхностей добавочных зубцов в направлении рабочего хода, и в пространстве, которое находится ближе к блоку магнитного поля, чем поверхность добавочного зубца, обращенная к блоку магнитного поля.
22. Линейный электродвигатель по п.21, в котором блок детектирования предусмотрен снаружи добавочного зубца в направлении, перпендикулярном направлению рабочего хода и направлению, в котором добавочный зубец обращен к блоку магнитного поля, и магнит блока магнитного поля проходит до положения, обращенного к блоку детектирования.
| JPH08168232 A, 25.06.1996 | |||
| US 2008246466 A1, 09.10.2008 | |||
| DE 10161905 A1, 18.06.2003 | |||
| JPS 5686065 A, 13.07.1981 | |||
| US 5091665 A, 25.02.1992 | |||
| JP 2004320959 A, 11.11.2004 | |||
| JPS 63167660 A, 11.07.1988 | |||
| JP 2007225575 A, 06.09.1007 |

