6fOV9570f f7 i2
I I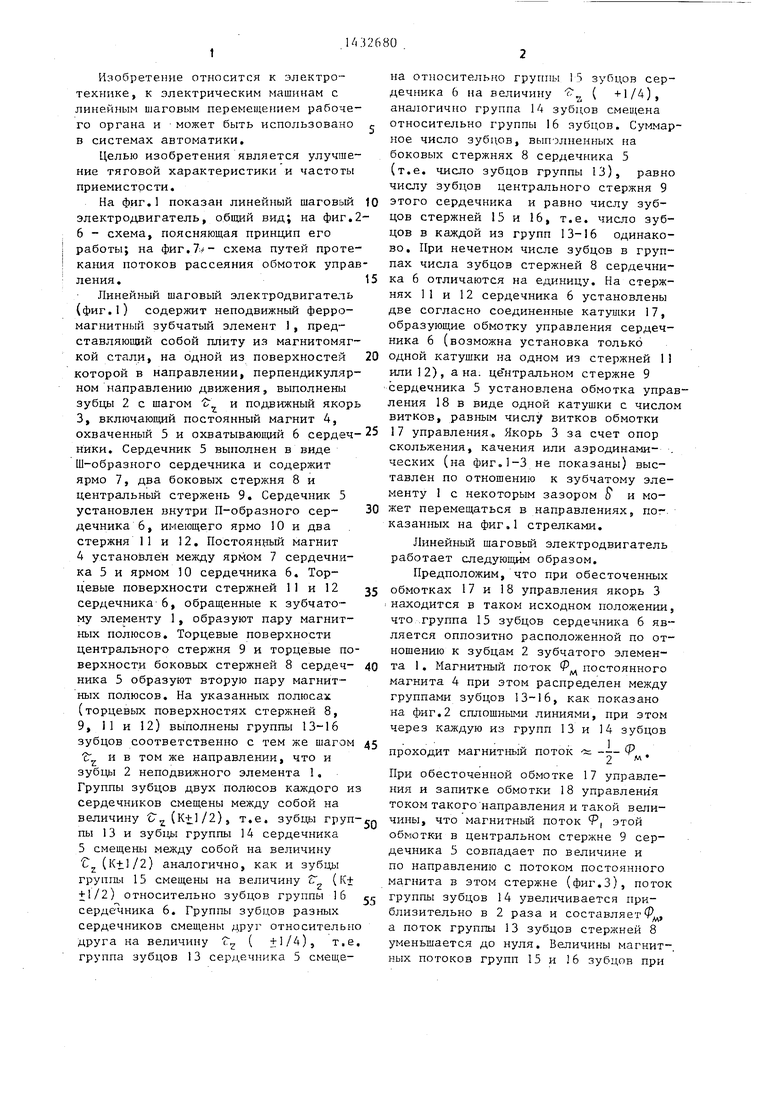
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный шаговый электродвигатель | 1988 |
|
SU1658314A1 |
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
| Линейный шаговый электродвигатель | 1981 |
|
SU989699A1 |
| Линейный шаговый электродвигатель | 1987 |
|
SU1457105A1 |
| Линейный шаговый электродвигатель | 1984 |
|
SU1365279A1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2006144C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ЧАСОВОГО ИНДИКАТОРА | 1987 |
|
RU2023280C1 |
| Однофазный электромагнитный шаговый двигатель | 1981 |
|
SU1014101A1 |
| Моментный электродвигатель постоянного тока | 1981 |
|
SU978281A1 |
Изобретение относится к электротехнике, а именно к электродвигателям с линейным перемещением рабочего органа, и может быть использовано в системах автоматики. Цель изобретения - улучшение тяговой характеристики и повьшение частоты приемистости. Линейный шаговый электродвигатель содержит неподвижный ферромагнитный элемент 1 с зубцами 2, выполненными с шагом С , и подвижный якорь 3, сост тоящий из постоянного магнита 4 и двухполюсных сердечников 5 и 6. Сердечник 5 вьтолнен Ш-образным и содержит ярмо 7, два боковых стержня 8 и центральный стержень 9. Сердечник 5 установлен внутри П-образного сердечника 6, имеющего ярмо 10 и стержни 1 1 и 12, Постоянный магнит 4 установлен между ярмом 7 сердечника 5 и ярмом 10 сердечника 6. Торцовые поверхности стержней 11 и 12 сердечника 6, обращенные к зубчатому элементу ; 1, образуют пару магнитных полюсов. Торцовые поверхности центрального стержня 9 и торцовые поверхности бо- ковых стержней 8 сердечника 5 обра- s зуют вторую пару полюсов. Поставленная цель достигается за счет того, что обмотка управления 18 установлена на центральном стержне Ш-образного сердечника, в результате чего за счет наличия его боковых стержней она ока- зьшается экранированной в магнитном отношении от магнитных потоков рассеяния обмотки управления 17. 7 ил. Направление движение (Л С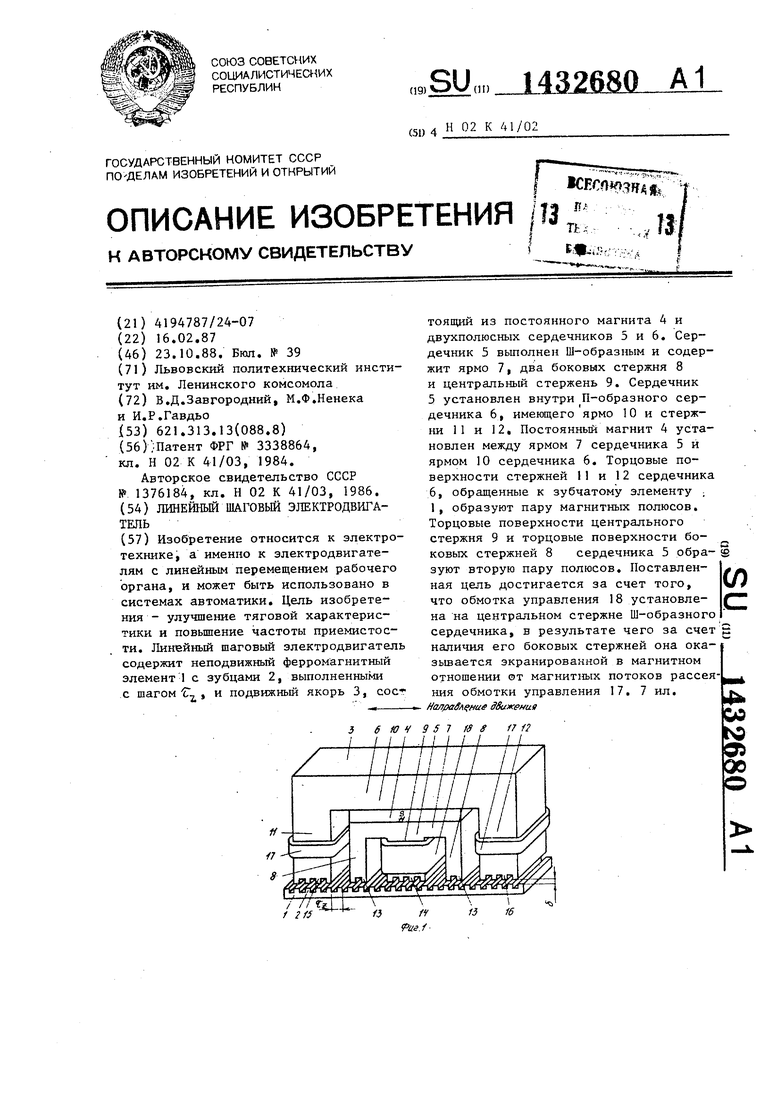
lirnill II/
16
Изобретение относится к электротехнике, к электрическим машинам с линейным шаговым перемещением рабочего органа и может быть использовано в системах автоматики.
Целью изобретения является улучшение тяговой характеристики и частоты приемистрсти.
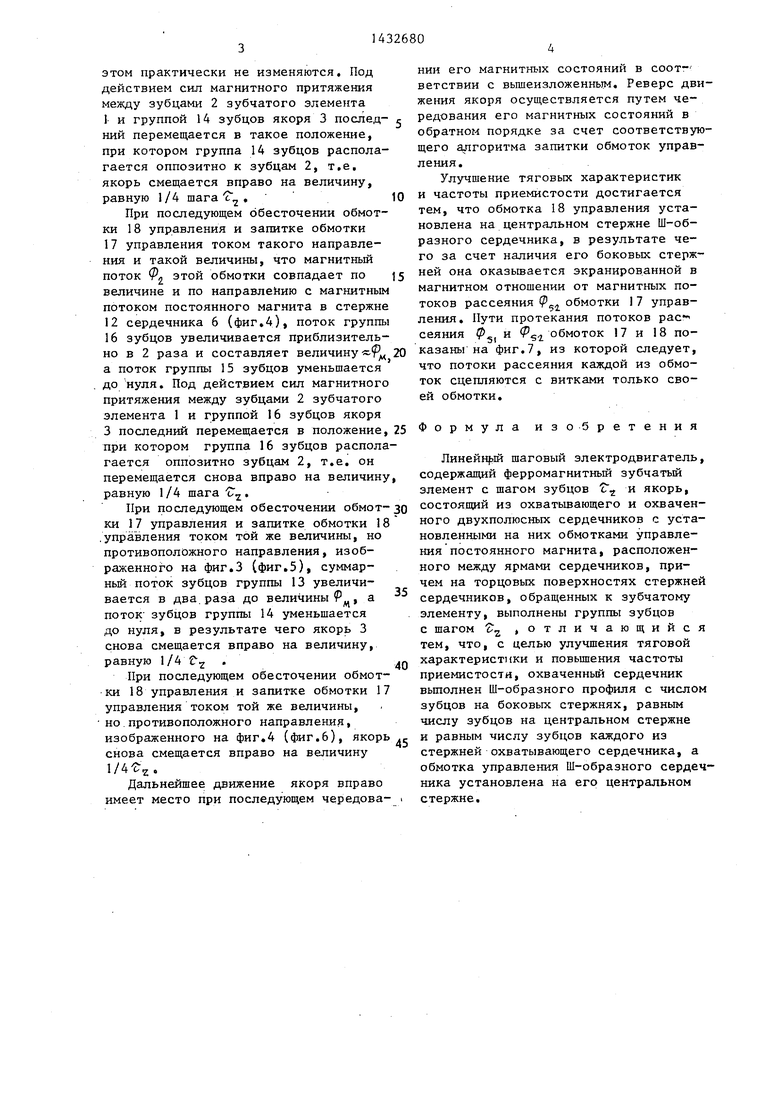
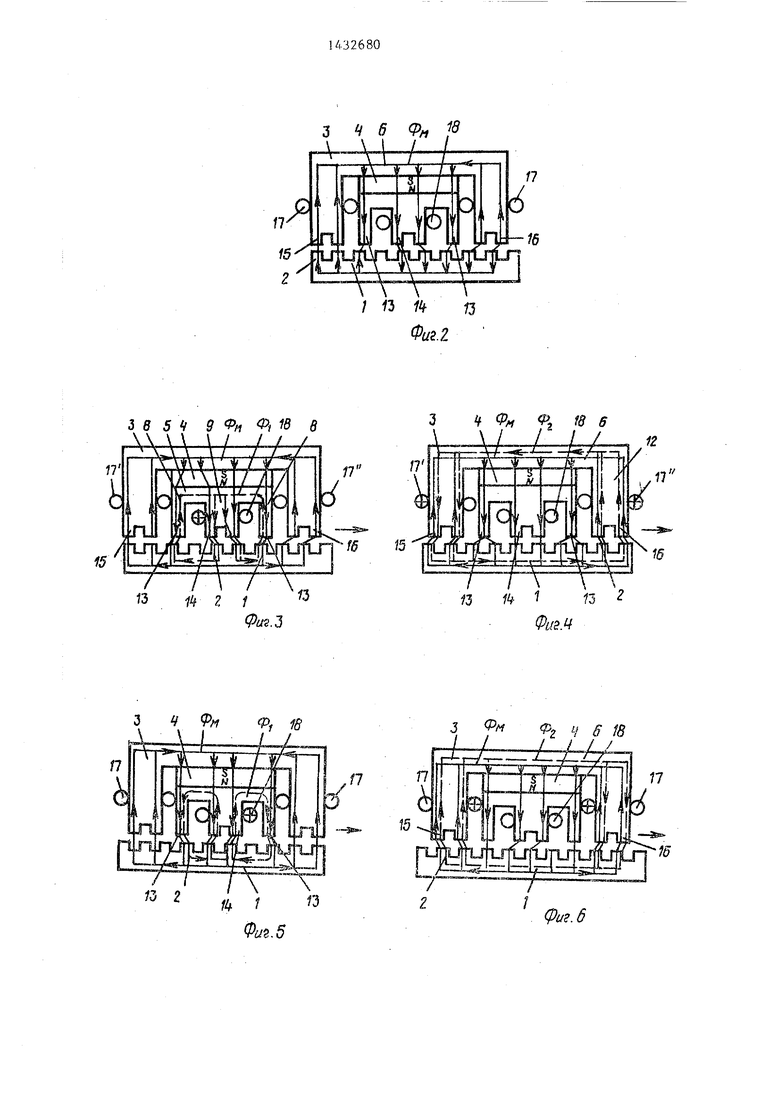
На фиг.1 показан линейный шаговый электродвигатель, общий вид; на фиг.2 6 - схема, поясняющая принцип его работы; на фиг.7;#- схема путей протекания потоков рассеяния обмоток управления.
Линейный шаговый электродвигате ть (фиг.1) содержит неподвижный ферромагнитный зубчатый элемент 1, представляющий собой плиту из магнитомяг- кой стали, на одной из поверхностей которой в направлении, перпендикулярном направлению движения, выполнен) зубць 2 с шагом S и подвижный якорь 3, включаю ;;ий постоянный магнит 4, охваченный 5 и охватываюпщй 6 сердеч- НИКИ. Сердечник 5 выполнен в виде Ш-образного сердечника и содержит ярмо 7, два боковых стержня 8 и центральный стержень 9. Сердечник 5 установлен }знутри П-образного сер- дечника 6, имеющего ярмо 10 и два стержня 11 и 12. ПостоянщзШ магнит
4установлен между ярмом 7 сердечника 5 и ярмом 10 сердечника 6. Торцевые поверхности стержней 11 и 12 сердечника 6, обращенные к зубчатому элементу 1, образуют пару магнит- полюсов. Торцевые поверхности центрального стержня 9 и торцевые поверхности боковых стержней 8 сердеч- ника 5 образуют втору о пару магнит- полюсов. На указанных
(торцевых поверхностях стержней 8, 9, 11 и 12) выполнень группь 13-16 зубцов соответственно с тем же шагом t и в том же направлении, что и зyбL. 2 неподвижного элемента 1, Группы зубцов двух полюсов каждого и сердечников смещены между собой на величину €Г,(К+1/2), т.е. зубцы груп пы 13 и зубцы группы 14 сердечника
5смещены между собой на величину C j,(K±l/2) аналогично, как и зубцы группь 15 смещены на величину 2 (К+ +1/2) относительно зубцов группы 16 серде 1шика 6. Группь зубцов разнь х сердечников смещены друг относительн друга на величину Т ( ±1/4), т.е группа зубцов 13 сердеч 1ика 5 смещена относительно 15 зубцов сердечника 6 на величину ( +1/4), аналогично группа 14 зубцов смещена относительно группы 16 зубцов. Суммарное число зубцов, выполненных на боковых стержнях 8 сердечника 5 (т.е. число зубцов группы 13), равно числу зубцов центрального стержня 9 этого сердечника и равно числу зубцов стержней 15 и 16, т.е. число зубцов в каждой из групп 13-16 одинаково. При нечетном числе зубцов в группах числа зубцов стержней 8 сердечника 6 отличаются на единицу. На стержнях 11 и 12 сердечника 6 установлены две согласно соединенные катушки 17, образу ощие обмотку управления сердечника 6 (возможна установка только одной катушки на одном из стержней 1I или 12), а на. це 1тральном стержне 9 Сердечника 5 установлена обмотка упраления 18 в виде одной катушки с число витков, равнь м числу витков обмотки 17 управления„ Якорь 3 за счет опор скольжения, качения или аэродинами- ческих (на фиг.1-3 не показаны) выставлен по отношению к зубчатому элементу 1 с некоторым зазором 5 и может перемещаться в направлениях, nor. казанных на фиг.1 стрелками.
Линейный шаговьм электродвигатель работает следующим образом.
Предположим, что при обесточенных обмотках 17 и 18 управления якорь 3 находится в таком исходном положении что .группа 15 зубцов сердечника 6 является оппозитно расположенной по отношению к зубцам 2 зубчатого элемента 1. Магнитный поток Р постоянного магнита 4 при этом распределен между группами зубцов 13-16, как показано на фиг,2 сгшошньнчи линиями, при этом через каждую из групп 13 и 14 зубцов
проходит магнитный поток
Ot: -- ф
При обесточенной обмотке 17 управления и запитке обмотки 18 управления током такого направления и такой величины, что магнитнь й поток Р, этой обмотки в центральном стержне 9 сердечника 5 совпадает по величине и по направлению с потоком постоянного ма гнита в этом стержне (фиг.З), поток группы зубцов 14 увеличивается приблизительно в 2 раза и составляет Ф,, а поток группь 13 зубцов стержней 8 уменьшается до нуля. Величины магнитных потоков групп 15 и 16 зубцов при
этом практически не изменяются. Под действием сил магнитного притяжения между зубцами 2 зубчатого элемента I и группой 14 зубцов якоря 3 послед- г НИИ перемещается в такое положение, при котором группа 14 зубцов располагается оппозитно к зубцам 2, т.е. якорь смещается вправо на величину, равную 1/4 шага Г , 10
При последующем обесточении обмотки 18 управления и запитке обмотки 17 управления током такого направления и такой величины, что магнитный поток Ф этой обмотки совпадает по (5 величине и по направлению с магнитным потоком постоянного магнита в стержне 12 сердечника 6 (фиг.4) поток группы 16 зубцов увеличивается приблизительно в 2 раза и составляет величину , 20 а поток группы 15 зубцов уменьшается до нуля. Под действием сил магнитного притяжения между зубцами 2 зубчатого элемента 1 и группой 16 зубцов якоря 3 последний перемещается в положение, 25 при котором группа I6 зубцов располагается оппозитно зубцам 2, т.е. он перемещается снова вправо на величину, равную 1/4 шага С.
При последующем обесточении обмот-ЗО ки 17 управления и запитке обмотки 18 .управления током той же величины, но противоположного направления, изображенного на фиг.З (фиг.5), суммар- ньй поток зубцов группы 13 увеличивается в два. раза до величины , а поток- зубцов группы 14 уменьшается до нуля, в результате чего якорь 3 снова смещается вправо на величину, равную 1/4 2 40
При последующем обесточении обмотки 18 управления и запитке обмотки 17 управления током той же величины, но.противоположного направления, изображенного на фиг.4 (фиг.6), якорьке снова смещается вправо на величину
1/4 2Дальнейшее движение якоря вправо имеет место при последующем чередова-
НИИ его магнитных состояний в соот- ветствии с вьшеизложенньгм. Реверс движения якоря осуществляется путем чередования его магнитных состояний в обратном порядке за счет соответствующего алгоритма запитки обмоток управления.
Улучшение тяговьк характеристик и частоты приемистости достигается тем, что обмотка 18 управления установлена на центральном стержне Ш-об- разного сердечника, в результате чего за счет наличия его боковых стержней она оказьшается экранированной в магнитном отношении от магнитных потоков рассеяния обмотки 17 управления. Пути протекания потоков рас- сеяния Ф и (Р обмоток 17 и 18 показаны на фиг.7, из которой следует, что потоки рассеяния каждой из обмоток сцепляются с витками только своей обмотки.
Формула изобретения
Линейн.1й шаговый электродвигатель, содержащий ферромагнитный зубчатый элемент с шагом зубцов f и якорь, состоящий из охватьшающего и охваченного двухполюсных сердечников с установленными на них обмотками управления постоянного магнита, расположенного между ярмами сердечников, причем на торцовых поверхностях стержней сердечников, обращенных к зубчатому элементу, выполнены группы зубцов с шагом с: , отличающийся тем, что, с целью улучшения тяговой характеристики и повьш1ения частоты приемистости, охваченный сердечник вьшолнен Ш-образного профиля с числом зубцов на боковых стержнях, равным числу зубцов на центральном стержне и равным числу зубцов каждого из стержней охватывающего сердечника, а обмотка управления Ш-образного сердечника установлена на его центральном стержне.
3 5 «Р/, /
I/
Ь в 5 Ч 9 н 1 8 в I I //
.
Фа.д
л г
/ 1Ъ 1ii з Фиг.2
% 2 б I/ / / , П
11
ФазМ
Л f- 2 Ч 6 f8 .
17
(Ри.6
fe.7
| ..Патент ФРГ № 3338864, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Линейный шаговый электродвигатель | 1986 |
|
SU1376184A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
