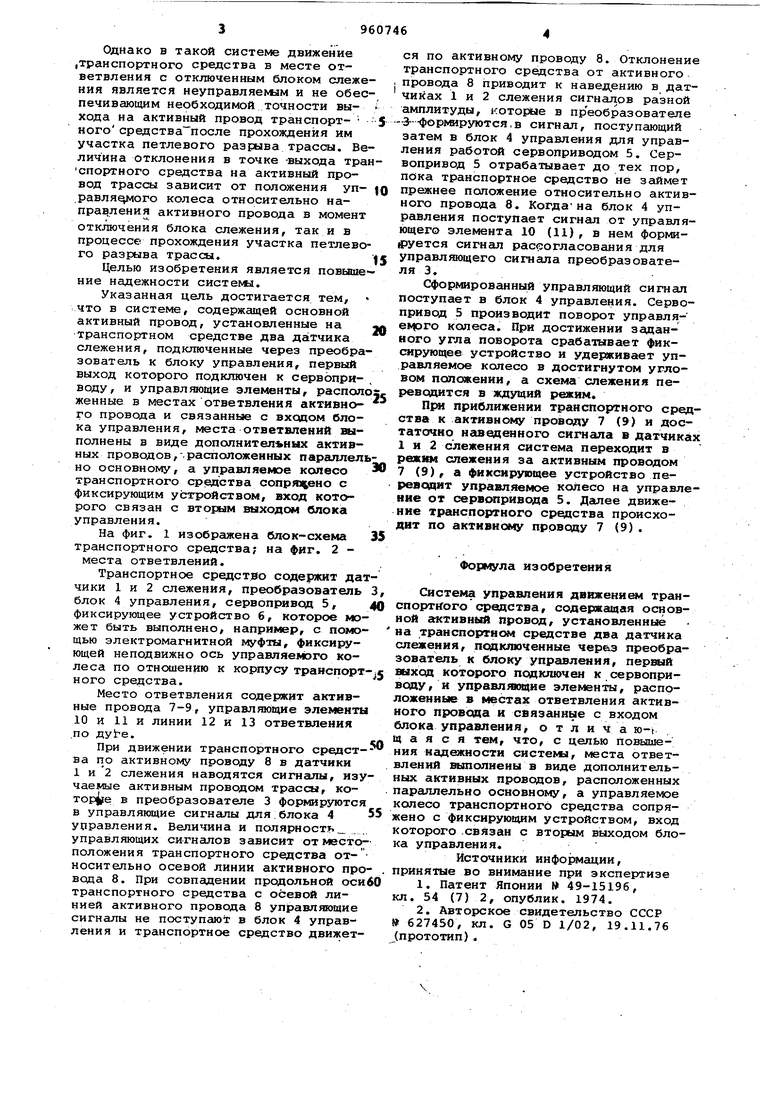
Изобретение относится к управлению подвижными объектс1ми, преимущест венно внутризаводского транспорта, и может быть использовано при построении системы движения автоматического транспорта. Известна система управления движением транспортного средства, в которой транспортное средство движется вдоль уложенного в полу кабеля, питае мого переменным током высокой частоты. Различные маршруты движения транспортного средства образуются замкнутыми -электрическими контурами, в каждый из которых подается переменное напряжение с различными частотами. В местах разветвлений маршрутов движения, где соприкасаются различные контуры устанавливаются датчики-ориентиры. На транспортном средстве установлен блок слежения за трассой с датчиками слежения, представляющими собой резонансный контур, воспринимающий сигнал, излучае1«1й уложенным в полу кабелем. При подходе транспорт ного средства к разветвлению по сигналу датчика-ориентира в соответствии с программой движения перестраивается резонансная частота датчика слежения, тем самым выбирается дальнейший маршрут движения по кабелю контура, на частоту которого в данный момент настраивается датчик слежения 1. Известной системе -присущи недостатки в построении транспортных схем движения и самого транспортного средства, а именно, создание довольно сложной по исполнению трассы движения и довольно сложное обрудование самого транспортного средства. Наиболее близкой к изобретению по технической сущности является система управления движением транспортного средства, в которой система управления упрощена тем, что активный кабель в местгос ответвлений расположен перпендикулярно к направлению движения транспортного средства ,с образованием петлевого участка. транспортное средство, при подходе к ответвлению не. получает сигнал-команду Движение прямо , оно продолжает движение по маршруту ответвления. ПЕЙ наличии сигнала-команды Движение прямо отключается блок слежения за Tgiaccoft и транспортное средство используя свой инерционный выбег преодолевает участок петлевого разрыва трассы (2. Однако в такой системе движение (Транспортного средства в месте ответвления с отключенным блоком слеже ния является неуправляемом и не обес печивающим необходимой точности выхода на активный провод транспорт- ногосредства после прохождения им участка петлевого разрыва трассы. Ве личина отклонения в точке -выхода тра спортного средства на активный провод трассы зависит от положения управляфлого колеса относительно направления активного провода в момент отключения блока слежения, так и в процессе прохождения участка петлево го разрыва трассы. Целью изобретения является повыше ние надежности системы. Указанная цель достигается тем, что в системе, содержащей основной активный провод, установленные на транспортном средстве два датчика слежения, подключенные через преобра зователь к блоку управления, первый выход которого подключен к сервоприводу, и управляющие элементы, распол женные в местах ответвления активного провода и связанные с входом блока управления, места ответвлений выполнены в виде допопнителъных активных проводов,- расположенных параллел но основному, а управляемое колесо транспортного средства сопр5П|1ено с фиксирующим устройством, вход которого связан с вторым выходом блока управления. На фиг. 1 изображена блок-схема транспортного средства; на фиг, 2 места ответвлений. Транспортное средство содержит да чики 1 и 2 слежения, преобразователь блок 4 управления, сервопривод 5, фиксирующее устройство 6, которое мо жет быть выполнено, например, с помо щью электромагнитной муфты, фиксирующей неподвижно ось управляемого колеса по отношению к корпусу транспорт ного средства. Место ответвления содержит активные провода 7-9, управляющие элемент 10 и 11 и линии 12 и 13 ответвления .по дуЬе. При движении транспортного средст ва по активному проводу 8 в датчики 1 и 2 слежения наводятся сигналы, из чаемые активным проводом трассы, котор е в преобразователе 3 формируютс в управляющие сигналы для:блока 4 управления. Величина и полярностъ управляющих сигналов зависит от MecTc положения транспортного средства относительно осевой линии активного пр всзда 8. При совпадении продольной ос транспортного средства с одевой линией активного провода 8 управляющие сигналы не поступают в блок 4 управления и транспортное средство движет ся по активному проводу 8. Отклонение транспортного средства от активного провода 8 приводит к навед,ению в датчиках 1 и 2 слежения сигналов разной амплитуды, которые в преобразователе -3--фор1«1руются.в сигнал, поступающий затем в блок 4 управления для управления работой сервоприводом 5. Сервопривод 5 отрабатывает до тех пор, пока транспортное средство не займет прежнее положение относительно активного провода 8. Когдана блок 4 управления поступает сигнал от управляющего элемента 10 (11) , в нем формийруется сигнал рассогласования для управляющего сигнала преобразователя 3, Сформированный управляющий сигнал поступает в блок 4 управления. Сервопривод 5 производит поворот управляeKforo колеса. При достижении заданного угла поворота срабатывает фиксирующее устройство и удерживает управляемое колесо в достигнутом угловом положении, а схема слежения переводится в ждущий режим. Прн приближении транспортного средства к активному проводу 7 (9) и достаточно наведенного сигнала в датчиках 1 и 2 слежения система переходит в режим слежения за активным проводом 7 (9), а фиксирующее устройство пережэдит управляемое колесо на управление от сервопривода 5. Дашее движение транспортного средства происходит по активному пррвоцу 7 (9), Формула изобретения Система управления движением транспорткого средства, содержащая основной активный провод, установленные на транспортном средстве два датчика слежения, подключенные чере13 преобразователь к блоку управления, перолй выход которого подключен к сервоприводу, и управлявшие элементы, расположенные в местах ответвления активного провода и связанные с входом блока управления, о т л и ч а ю-ь щ а я с я тем, что, с целью Повышения надгакности систекш, места ответвлений олполнены в виде дополнительных активных проводов, расположенных параллельно основному, а управляемое колесо транспортного средства сопряжено с фиксирующим устройством, вход которого .связан с вторым выходом блока управления. Источники информации, принятые во внимание при экспертизе 1.Патент Японии № 49-15196, кл. 54 (7) 2, опублик. 1974. 2.Авторское свидетельство СССР №627450, кл. G 05 D 1/02, 19.11.76 (прототип).
k1
Т
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления движением транспортного средства | 1977 |
|
SU697980A1 |
| Система управления движением транспортного средства | 1979 |
|
SU860012A1 |
| Система управления движением транспортного средства | 1976 |
|
SU627450A1 |
| Система управления движением транспортного средства | 1984 |
|
SU1228081A1 |
| Устройство для управления транспортными средствами | 1977 |
|
SU682937A1 |
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| Устройство управления транспортного средства | 1986 |
|
SU1472876A1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2530704C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
X
О.
xQ
я
