1
Изобретение относится к автоматизации управления движением самоходного средства вдоль заданного токонесущим проводом направления и может быть использовано в средствах, транспортирующих руду и породу на рудниках и в карьерах.
Известно устройство для автоматического управления движением транспортного средства, содержащее чувствительный элемент с индукционным магнитоприемником, взаимодействующим с токонесущим проводом, питаемым генератором переменйого тока, регулятор и чувствительный элемент выделения сигналов переключения, блок переключения структуры регулятора для определения местонахождения агрегата на том или другом участке в зависимости от профиля трассы, а следовательно, программы работ, дополнительный токонесущий провод, питаемый от отдельного генератора и проложенный на участках с одним профилем трассы на расстоянии, отличном от расстояния на участках с другим профилем трассы по отнощению к токонесущему проводу, и взаимодействующий с чувствительным элементом выделения сигналов переключения структуры, причем в местах смены профиля трассы дополнительный токонесущий провод проложен перпендикулярно основному .
Недостатками известного устройства являются необходимость прокладки дополнительного провода по всей трассе движения с установкой дополнительного генератора, а также неоднозначность привязки к местности моментов переключения структуры, так как сигналы переключения структуры не
0 имеют отличительных признаков, соответствующих конкретным точкам на местности, вследствие чего возможны ощибки в определении структуры и, как следствие, отказ системы.
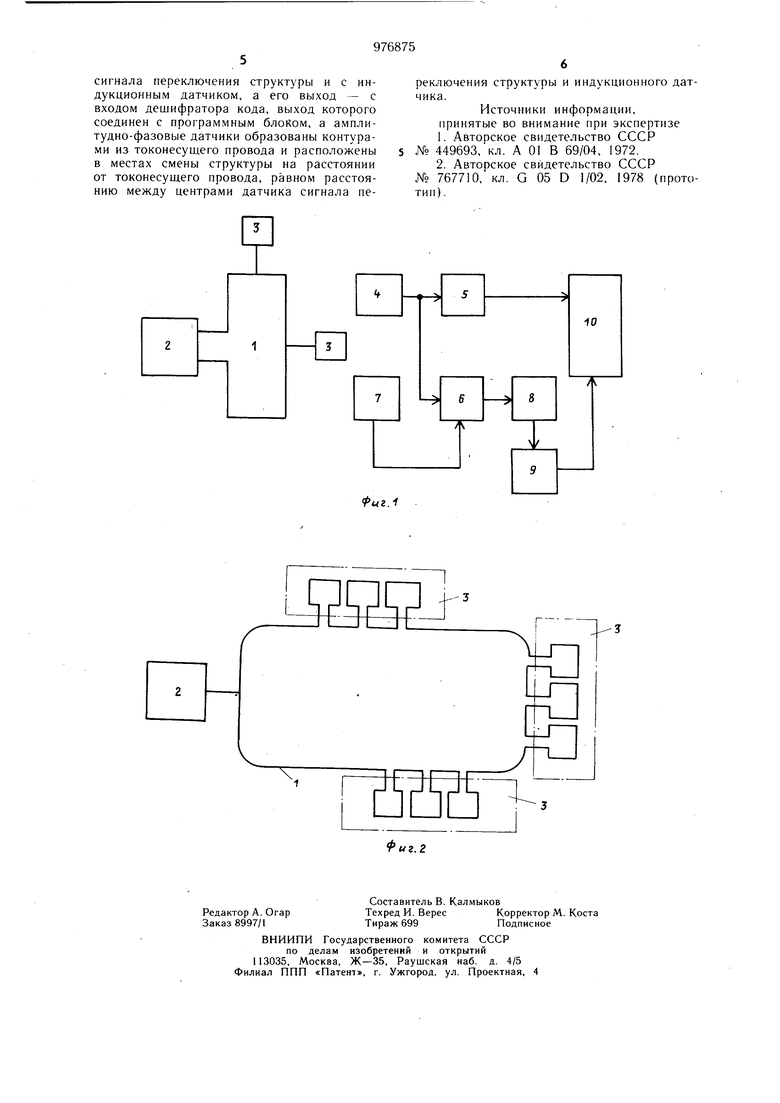
Известно также устройство для автоматического управления движением самоходного средства, содержащее датчик сигнала переключения структуры, программный блок, соединенный с сервоприводами органов управления самоходного средства, чувствитель2Q ный элемент с индукционным датчиком, установленным с возможностью взаимодействия с токонесущим проводом, подключенным к генератору и уложенным на местности в соответствии с заданной траекторией движения самоходного средства 2. Однако это устройство характеризуется неоднозначностью привязки к местности моментов переключения структуры, так как сигналы переключения структуры не имеют отличительных признаков, соответствующих конкретным точкам на местности. В условиях помех возможно формирование ложных сигналов переключения структуры, которые также фиксируются счетчиком. В результате из программного блока будет взята программа управления, не соответствующая данному участку трассы, т. е. произойдет отказ системы. Цель изобретения - повыщение надежности автоматического управления. Указанная цель достигается тем, что устройство для автоматического управления движением самоходного средства снабжено амплитудно-фазовыми датчиками, амплитудно-фазовым детектором и дешифратором кода, причем входы амплитудно-фазового детектора соединены с датчиком сигнала переключения структуры и с индукционным датчиком, а его выход - с входом дешифратора кода, выход которого соединен с программным блоком, а амплитудно-фазовые датчики образованы контурами из токонесущего провода и расположены в местах смены структуры на расстоянии от токонесущего провода, равном расстоянию между центрами датчика сигнала переключения структуры и индукционного датчика. На фиг. 1 изображена блок-схема устройства; на фиг. 2 - схема прокладки токонесущего провода с амплитудно-фазовыми датчиками. Устройство содержит токонесущий провод I, питаемый генератором 2 переменного тока, амплитудно-фазовые датчики 3, образованные токонесущим проводом 1 в местах переключения структуры, индукционный датчик 4, взаимодействующий с токонесущим проводом 1 и соединенный с преобразующе-усилительным блоком 5 и амплитудно-фазовым детектором 6, датчик 7 сигнала переключения структуры, расположенный в одной плоскости с индукционным датчиком 4 и На расстоянии от его оси, совпадающей с направлением движения, равном расстоянию от токонесущего провода I до оси контуров амплитудно-фазового датчика 3, соединенный с амплитудно-фазовым детектором 6, выход которого подключен к дещифратору 8 кода. Сигнал с выхода дешифратора 8 поступает в программный блок 9, который управляет сервоприводами 10 органов управления самоходного агрегата. Устройство работает следующим образом. По маршруту, где движется самоходный агрегат, прокладывают токонесущий провод I, питаемый генератором 2 переменного тока. Весь марщрут разбивают на отдельные участки с одинаковой программой работ. На границах участков, где происходит смена программы, установлены амплитудно-фазовые датчики 3. Количество датчиков определяется количеством участков. Перед началом движения самоходный агрегат ориентируют так, чтобы индукционный датчик 4 находился над токонесущим проводом 1. С индукционного датчика 4 на амплитудно-фазовый детектор 6 поступает опорный сигнал, неизменный по фазе. Во время движения самоходного агрегата при смене участков в датчике 7 сигнала переключения наводится кодированный сигнал, код которого зависит от количества контуров амплитудно-фазового датчика 3 и направления тока в контурах. Этот сигнал поступает на амплитудно-фазовый детектор б, затем На дещифратор 8 кода, далее в программный блок 9, откуда в соответствии с принятым кодом выбирается программа управления сервоприводами 10 органов управления самоходного агрегата.. Для определения координат движущегося самоходного агрегата в местах смены структуры (т. е. смены программы работы) применяют кодирование сигнала переключения структуры амплитудно-фазовыми датчиками 3, образованными токонесущим проводом в местах смены структуры, причем код сигнала определяется количеством контуров датчика и направлением тока в них. Кодированный сигнал, принятый датчиком 7 сигнала переключения структуры, выделенный амплитудно-фазовым детектором 6 и дещифрованный дещифратором 8 кода, выбирает из программного блока 9 программу управления работой сервоприводов 10 органов управления самоходного агрегата. Благодаря такой схеме устройства достигаются высокая помехоустойчивость и однозначность определения координат в смены структуры. Таким образом, исключаются ощибки в определении места нахождения самоходного агрегата, т. е. повыщается надежность работы устройства. Формула изобретения Устройство для автоматического управления движением самоходного средства, содержащее датчик сигнала переключения структуры, программный блок, соединенный с сервоприводами органов управления самоходного средства, чувствительный элемент с индукционным датчиком, установленным с возможностью взаимодействия с токонесуц им проводом, подключенным к генератору и уложенным на местности в соответствии с заданной траекторией движения самоходного средства, отличающееся тем, что, с целью повыщения надежности автоматического управления, устройство снабжено амплитудно-фазовыми датчиками, амплитудно-фазовым детектором и дещифратором кода, причем входы амплитуднофазового детектора соединены с датчиком
сигнала переключения структуры и с индукционным датчиком, а его выход - с входом дешифратора кода, выход которого соединен с программным блоком, а амплитудно-фазовые датчики образованы контурами из токонесущего провода и расположены в местах смены структуры на расстоянии от токонесущего провода, равном расстоянию между центрами датчика сигнала переключения структуры и индукционного датчика.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 449693, кл. А 01 В 69/04, 1972.
2.Авторское свидетельство СССР
№ 767710, кл. G 05 D 1/02, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением транспортного средства | 1990 |
|
SU1783481A1 |
| Устройство для автоматического управления движением самоходного агрегата | 1979 |
|
SU767710A1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2530704C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНЫХ АГРЕГАТОВ | 1973 |
|
SU399219A1 |
| Система управления движением самоходного агрегата при полигонных испытаниях | 1980 |
|
SU888080A1 |
| Устройство для автоматического управления движением транспортного средства | 1971 |
|
SU449693A1 |
| Устройство для автоматического направления движения самоходных агрегатов | 1977 |
|
SU615880A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНОЙ КОЛЕСНОЙ МАШИНЫ | 1969 |
|
SU249110A1 |
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| Способ ориентации самоходных машин в индукционном поле токонесущего провода | 1978 |
|
SU695600A2 |
