Изобретение относиться к авиационным электроприводам, в частности к электромеханизмам поступательного действия, и может быть использовано в других областях техники.
Известен электромеханизм (патент RU №2277195 С2 от 07.02.2003 г.), состоящий из реверсивного вентильного электродвигателя со встроенной электромагнитной тормозной муфтой и коробкой управления, редуктора, шариковинтовой передачи с выходным звеном и блока микропереключателей. В качестве прототипа в патенте указан электромеханизм поступательного действия МП10С2.5А14, выполненный ОАО "Электропривод".
В связи с тем, что к авиационным электроприводам постоянно ужесточаются требования к надежности, повышения технологичности и увеличения ресурса работы, данный электромеханизм имеет недостатки:
- сложность и нетехнологичность устройства срабатывания микропереключателей;
- износ контактов микропереключателей;
- отсутствие контроля промежуточного положения электромеханизма.
Наиболее близкий к заявленному является электромеханизм (патент US №7105801 В2 от 02.04.2004 г.), состоящий из электродвигателя, штока с парой трения скольжения, кинематического редуктора со специальным ходовым винтом, для передачи движения лопасти, на которой установлены оптические бесконтактные датчики, управляющие перемещением штока.
В описании патента указана возможность использования в качестве переключателя датчик с эффектом Холла. Переключатель включает в себя источник магнитного поля, детектор, определяющий магнитное поле и лопастной прерыватель, который перекрывает магнитное поле.
Предложенный электромеханизм имеет следующие недостатки:
- наличие лопасти перемещающейся по ходовому винту нетехнологично и усложняет конструкцию;
- перекрытие оптического или магнитного источника лопастным прерывателем, вызывает погрешности, связанные с так называемой плавающей точкой;
- трудоемкость и сложность настройки и подрегулировки при жестко заданных положениях остановки штока;
- необходимость разборки электромеханизма для настройки хода штока.
Задача предлагаемого изобретения состоит в повышении надежности, увеличении ресурса работы, снижении трудоемкости изготовления электромеханизма и уменьшении его массогабаритных показателей, в расширении и упрощении возможностей управления и контроля ходом штока электромеханизма.
Технический результат изобретения состоит в упрощении конструкции и управляемости, отсутствии необходимости разбирать электромеханизм для регулировки хода штока и возможности постоянного контроля положения штока.
Поставленная задача решается следующим образом.
Предложен электромеханизм поступательного действия, содержащий электродвигатель, шток с винтовой парой и кинематический редуктор, контроль и управление положением штока в котором осуществляется с помощью двух аналитических датчиков Холла, расположенных под углом 90° относительно друг друга, параллельно плоскости двухполюсного цилиндрического магнита диаметральной намагниченности, а абсолютный угол поворота валика кинематического редуктора, соответствующий фактическому положению штока, определяется по отношению текущих значений выходных напряжений датчиков Холла, полученных при вращении или фиксированном положении постоянного магнита.
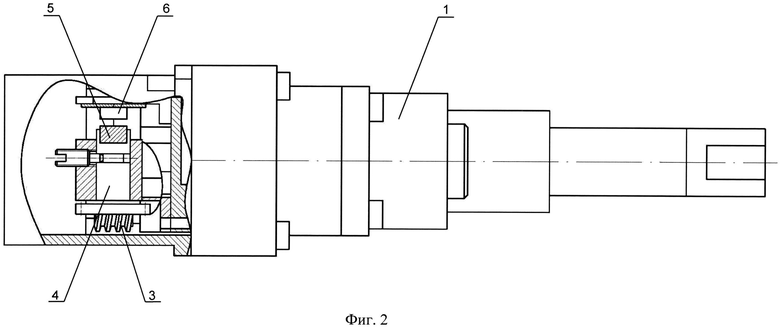
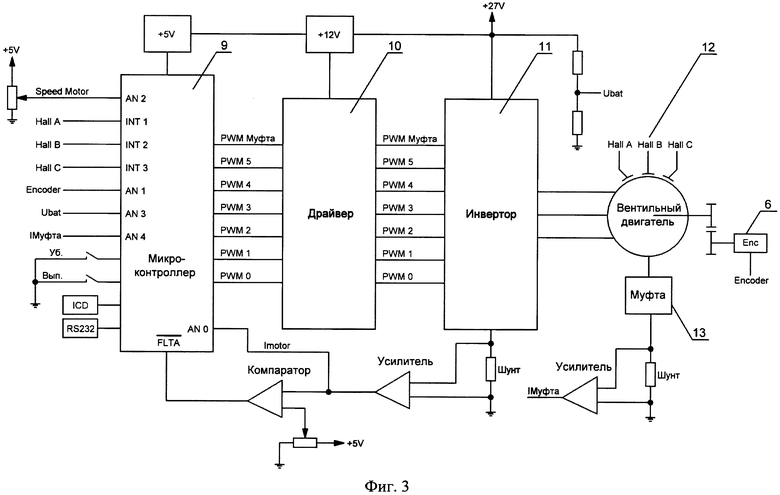
На фиг.1 показан пример электромеханизма поступательного действия, общий вид; на фиг.2 - элемент валика с магнитом и платой датчика Холла; на фиг.3 - структурная схема блока управления электромеханизмом поступательного действия с вентильным электродвигателем.
Электромеханизм поступательного действия фиг.1 содержит вентильный электродвигатель 1 с тремя датчиками положения ротора 12 и муфтой стояночного тормоза 13, показаны на фиг.3, редуктор 2, кинематический редуктор 3, валик 4 с постоянным магнитом 5, показан на фиг.2, шток 8, ходовой винт 7 и платы с датчиком Холла 6. Блок управления фиг.3 содержит микроконтроллер 9, драйвер 10 и инвертор 11.
Работает электромеханизм поступательного действия следующим образом. Микроконтроллер 9 осуществляет прием управляющих сигналов "Выпуск", "Уборка", формирует сигнал, который через силовой ключ подает напряжение на обмотку муфты стояночного тормоза 13 электродвигателя 1. Микроконтроллер 9 снижает напряжение на обмотке муфты стояночного тормоза 13 до напряжения удержания. Одновременно микроконтроллер 9, анализируя состояние датчиков положения ротора 12 электродвигателя 1, начинает разгонять электродвигатель 1 до установленной скорости, формируя сигналы, поступающие через драйвер 10 на силовые ключи инвертора 11, которые коммутируют обмотки электродвигателя 1. При включении электродвигателя 1 вращательное движение через редуктор 2 и кинематический редуктор 3 передается валику 4 с постоянным магнитом 5, который поворачивается за полный ход штока на угол 270°, при этом напряжение на выходе микросхем датчиков Холла 6, например датчик Холла типа ДХК-0,5 с дополнительным усилителем, изменяется в диапазоне от 0,5 до 4,5 В по синусоидальному закону:
U1=K1·sinx,
поскольку второй датчик Холла 6 смещен относительно первого на 90° напряжение на выходе его микросхемы изменяется по закону:
U2=K2·sin(90°±x)=K2·cosx,
где U1 - напряжение на выходе микросхемы первого датчика Холла;
U2 - напряжение на выходе микросхемы второго датчика Холла;
x - угол поворота магнита 5;
K1, K2 - константы.
Микроконтроллер 9 анализирует отношение напряжений с выходов микросхем датчиков Холла 6:
Соответственно контролируя это отношение с помощью микроконтроллера 9, входящего в состав блока управления электромеханизмом поступательного действия, можно выставлять разные значения момента выключения электродвигателя 1 в пределах рабочего хода штока 8. При этом регулировка пределов рабочего хода штока 8 осуществляется без разборки электромеханизма поступательного действия и каких-либо механических регулировок. Использование отношения напряжений с выходов микросхем датчиков Холла 6 позволяет упростить распознавание действительного положения штока 8, кроме этого, позволяет существенно снизить погрешность по положению штока 8, возникающую при различных температурных условиях эксплуатации электромеханизма поступательного действия, особенно в авиации и космонавтике, поскольку микроконтроллер 9 анализирует относительную погрешность, а не абсолютную, связанную с температурными колебаниями напряжений с выхода микросхем датчиков Холла 6. Такой подход позволяет повысить точность отработки хода штока 8. Таким же образом реализуется электромеханизм поступательного действия с электродвигателем постоянного тока, асинхронным или синхронным электродвигателями.
Контроль за положением штока 8 можно осуществлять по последовательному интерфейсу, по которому микросхемы датчиков Холла 6 выдают информацию о текущем положении штока 8.
Таким образом, технический результат достигнут, выполнены поставленные задачи и создана новая более точная, устойчивая к внешним воздействующим факторам надежная конструкция с уменьшенным количеством деталей. На ОАО "Электропривод" изготовлены и прошли испытания электромеханизмы поступательного действия с управлением бесконтактными датчиками Холла по предложенному техническому решению, что подтверждается актом №30-14/12-2013.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с электромеханическим позиционированием выходного вала | 2021 |
|
RU2757324C1 |
| ПНЕВМОПРИВОД ДВЕРЕЙ АВТОТРАНСПОРТНЫХ СРЕДСТВ С ЩЕЛЕВЫМ МАГНИТОЧУВСТВИТЕЛЬНЫМ ДАТЧИКОМ И ЭЛЕКТРОННЫМ АНТИБЛОКИРОВОЧНЫМ УСТРОЙСТВОМ | 2005 |
|
RU2313457C2 |
| ПРИВОДНОЙ ЭЛЕКТРОМЕХАНИЗМ | 2003 |
|
RU2277195C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЛИНЕЙНОГО ИЛИ УГЛОВОГО ПЕРЕМЕЩЕНИЯ ОБОРУДОВАНИЯ ИЛИ МЕХАНИЗМА ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ВАРИАНТЫ) | 2009 |
|
RU2403204C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |
| Исполнительный механизм системы управления | 2015 |
|
RU2607490C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 2017 |
|
RU2659806C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВРАЩАЮЩИХСЯ УЗЛОВ СЧЕТЧИКОВ ВОДЫ С КРЫЛЬЧАТКОЙ, МАГНИТНО-СВЯЗАННОЙ С ИНДИКАТОРНЫМ ПРИБОРОМ, В РЕЖИМЕ ВЫБЕГА С ЗАДАННОЙ НАЧАЛЬНОЙ СКОРОСТЬЮ | 2003 |
|
RU2251666C2 |
| РЕВЕРСИВНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1992 |
|
RU2038687C1 |
| Блок управления управляющим двигателем-маховиком с резервированием управляющего канала | 2015 |
|
RU2627493C2 |
Изобретение относится к электроприводам, в частности к электромеханизмам поступательного действия. Электромеханизм поступательного действия состоит из электродвигателя, штока с винтовой парой и кинематического редуктора. Контроль и управление положением штока электромеханизма осуществляется с помощью двух аналитических датчиков Холла, расположенных под углом 90° относительно друг друга, параллельно плоскости двухполюсного цилиндрического постоянного магнита диаметральной намагниченности. Магнит установлен на валике кинематического редуктора. Абсолютный угол, соответствующий фактическому положению штока, определяется по отношению текущих значений выходных напряжений датчиков Холла, полученных при вращении или фиксированном положении постоянного магнита. Достигается повышение точности отработки заданной величины хода штока и возможность постоянного контроля положения штока. 3 ил.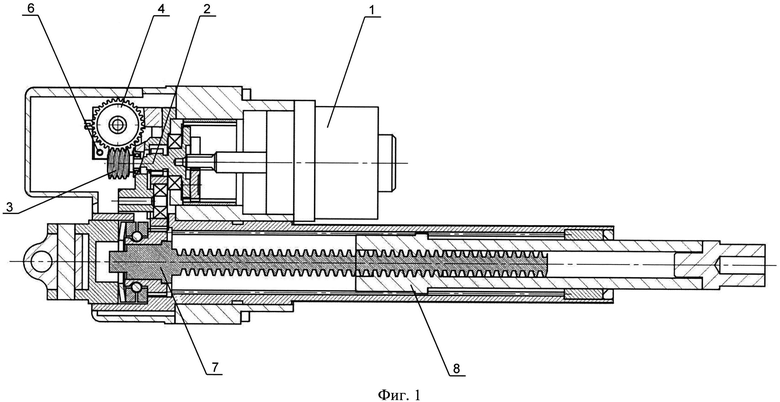
Электромеханизм поступательного действия, состоящий из электродвигателя, штока с винтовой парой и кинематического редуктора, отличающийся тем, что контроль и управление положением штока электромеханизма осуществляется с помощью двух аналитических датчиков Холла, расположенных под углом 90° относительно друг друга, параллельно плоскости двухполюсного цилиндрического постоянного магнита диаметральной намагниченности, установленного на валике кинематического редуктора, а абсолютный угол поворота валика кинематического редуктора, соответствующий фактическому положению штока, определяется по отношению текущих значений выходных напряжений датчиков Холла, полученных при вращении или фиксированном положении постоянного магнита.
| НАПИТОК БЕЗАЛКОГОЛЬНЫЙ | 2013 |
|
RU2532927C2 |
| US 7105801 B2, 12.09.2006 | |||
| US 20110031346 A1, 14.06.2010; | |||
| ЭЛЕКТРИЧЕСКОЕ ЛИНЕЙНОЕ ПРИВОДНОЕ УСТРОЙСТВО | 2008 |
|
RU2473162C2 |
| ПРИВОДНОЙ ЭЛЕКТРОМЕХАНИЗМ | 2003 |
|
RU2277195C2 |

