Изобретение относится к области систем ориентации и стабилизации космических аппаратов (КА) и может быть использовано в составе управляющих двигателей-маховиков (УДМ), представляющих собой трехфазные бесколлекторные электродвигатели постоянного тока.
Также устройство может найти применение в областях, где требуется высокоточное управление бесколлекторными электрическими двигателями и устойчивость к сбоям компонентов блока управления.
Известно техническое решение (RU 2008147082 А, опубл. 10.06.2010, Способ управления вентильным электроприводом), в котором электродвигатель с ротором на постоянных магнитах, статорные обмотки которого подсоединены к выводам переменного тока мостового инвертора, выводами постоянного тока подключенного к источнику электропитания и емкостному накопителю. Недостатком такого решения является отсутствие измерения тока, протекающего через каждую фазу мостового инвертора, что не дает возможности диагностировать выход из строя двигателя. Также в данном решении не предполагается использование датчика положения ротора, что приводит к ухудшению качества регулирования при низких скоростях вращения ротора.
Решение (RU 93033592 А, опубл. 27.08.1995, Вентильный электропривод), в котором для расширения технических и эксплуатационных возможностей путем расширения арсенала средств управления моментом двигателя применяют механическое управление путем поворота основных частей двигателя (статора или ротора). Предложены двигатели с поворотом ротора датчика положения или разворота роторов датчика положения и собственно двигателя, а также двигатели с непосредственным поворотом и разворотом статоров или с сопряжением ротора со статором с помощью редуктора. Недостатком такого решения является механическое управление датчиком положения ротора.
Электропривод автономного объекта с вентильным двигателем (RU 2537957, опубл. 10.01.2015) расширяет функциональные возможности электропривода с вентильным двигателем за счет дополнительного управления в зависимости от режима работы, следствием чего является повышение энергоэффективности за счет оптимизации в режиме пуска и использование режима рекуперативного торможения. При подключении данного устройства к общей шине питания переход в рекуперативный режим может приводить к возникновению помех.
Наиболее близким является техническое решение (патент RU 2366069 С1, опубл. 27.08.2007, Вентильный электропривод), в котором электропривод содержит электродвигатель, устройство формирования цифрового сигнала скорости, преобразователь «код-ШИМ», коммутатор, устройство формирования направления вращения, датчик положения, преобразователь сигнала обратной связи по положению в код, устройство определения ошибки по положению и устройство определения рассогласования по скорости, устройство выделения модуля и наблюдатель скорости, составленный из двух сумматоров, интегратора, устройства выделения модуля, функционального преобразователя и устройства умножения. Наблюдатель скорости по сигналу вырабатывает сигнал оценки, используемый в электроприводе в качестве обратной связи. К недостаткам данной схемы можно отнести программную реализацию алгоритма управления, в то время как реализация с использованием ПЛИС может увеличить надежность и быстродействие данного решения.
Кроме того, стоит отметить, что ни одна из вышеупомянутых схем не предполагает резервирования канала управления, что грозит потерей контроля над двигателем при выходе из строя управляющего элемента. Также в данных схемах перепрограммирование управляющих элементов возможно только при очном участии оператора, что в некоторых условиях неприемлемо.
Для автономной работы двигателей также важна способность схемы управления к автоматической самодиагностике и принятию моментальных мер в случае сбоя.
Задачей изобретения является создание блока управления управляющим двигателем-маховиком с резервированием управляющего канала, направленного на решение упомянутых проблем и устранение недостатков известных из уровня техники устройств.
Техническим результатом изобретения является повышение точности управления бесколлекторными электродвигателями, входящими в состав систем ориентации и стабилизации космических аппаратов, обеспечение выносливости к разрушающим факторам и техническим сбоям, создание блока управления, адаптированного под широкий спектр питающего напряжения. Для достижения поставленной задачи были реализованы: два независимых канала управления, способные работать как единый канал с повышенной производительностью вычислений, подбор элементной базы, защита компонентов схемы автоматическими ключами.
Технический результат достигается тем, что блок управления бесколлекторным электрическим двигателем, включающий два независимых канала питания, снабженных автоматическими ключами для защиты от протекания избыточного тока, канал управления на микроконтроллере и канал управления на программируемой логической интегральной схеме (ПЛИС), выполнен с возможностью комбинирования независимых каналов управления для повышения производительности вычислений, в котором каждый из независимых каналов управления снабжен соответствующей группой датчиков, включающей датчики положения ротора, а также датчики температуры и датчики силы тока для самодиагностики исправности, подключенные соответственно ко входу микроконтроллера и ПЛИС, выходы которых связаны с соответствующей группой инверторов, при этом микроконтроллер канала управления и ПЛИС взаимосвязаны, по меньшей мере, с одним соответствующим микроконтроллером, обеспечивающим связь с внешним управляющим устройством, причем блок управления снабжен ПЗУ, к которому ПЛИС имеет прямой доступ, а микроконтроллер канала управления имеет доступ, опосредованный через ПЛИС. В качестве датчиков положения ротора могут быть использованы датчики Холла.
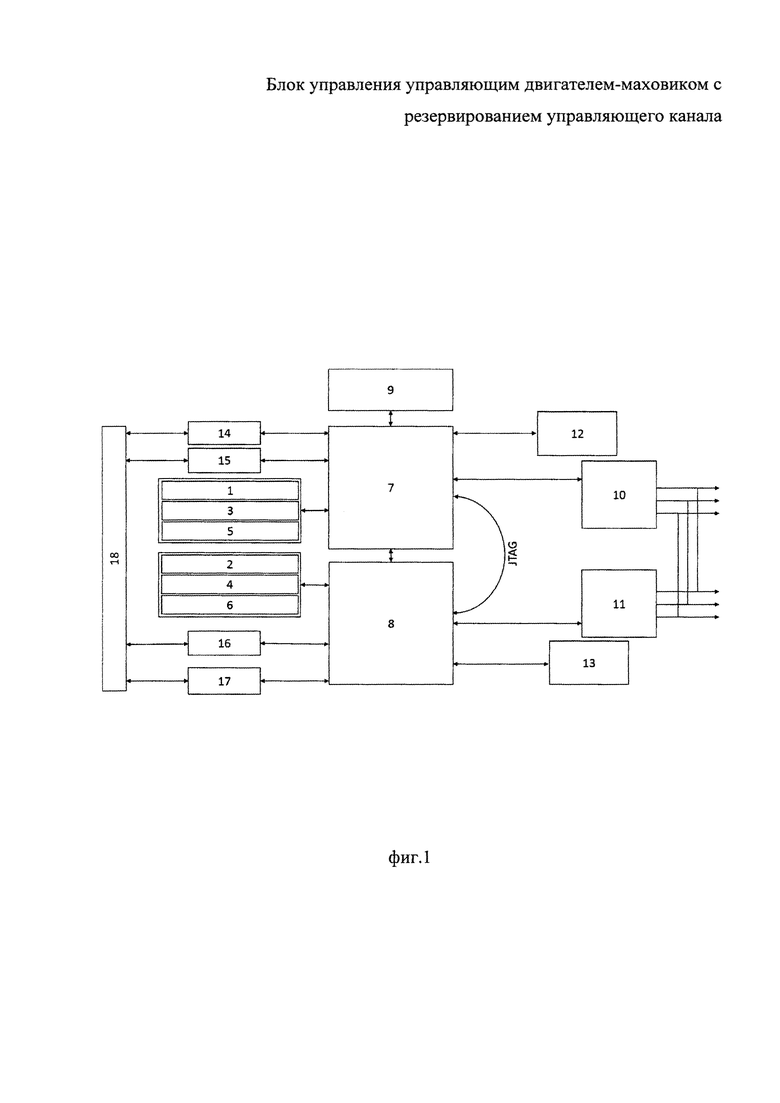
Изобретение поясняется структурной схемой блока управления, представленной на фиг. 1. На схеме показаны информационные каналы между компонентами (каналы энергоснабжения не обозначены).
Блок управления бесколлекторным электрическим двигателем, а именно управляющим двигателем-маховиком с резервированием управляющего канала, содержит два независимых канала управления, каждый из которых снабжен соответствующей группой датчиков, включая датчики 1, 2 положения ротора, например датчики Холла, а также датчики 3, 4 температуры и датчики 5, 6 силы тока для самодиагностики исправности, подключенные соответственно ко входу ПЛИС 7 и ко входу микроконтроллера 8. ПЛИС 7 имеет прямой доступ к ПЗУ 9, к которому микроконтроллер 8 имеет доступ, опосредованный через ПЛИС 7.
Управляющие сигналы с ПЛИС 7 и микроконтроллера 8 поступают на соответствующую группу инверторов 10 и 11 и на группы контроллеров питания и назад к микроконтроллеру 8 и ПЛИС 7 от контроллеров и ключей, входящих в блоки 12, 13 элементов, управляющих питанием. ПЛИС 7 и микроконтроллер 8 также взаимосвязаны с соответствующими микроконтроллерами 14, 15 и 16, 17, обеспечивающим связь с внешним управляющим устройством 18, в качестве которых использованы контроллеры CAN1 и Space Wire в управляющем канале ПЛИС 7, и контроллеры CAN2 и RS422 в управляющем канале микроконтроллера 8.
Предлагаемое устройство подразумевает два независимых канала управления. При сбое одного из каналов задачи обработки данных датчиков и формирования токов на обмотках статора целиком берет на себя другой, исправный. Микроконтроллер 8 обеспечивает так называемое векторное управление, ПЛИС 7 - синусоидальное. При этом в полностью исправном состоянии ПЛИС берет на себя рутинные операции по фильтрации данных и обработке команд управления, что позволяет экономить процессорное время микроконтроллера и, как следствие, улучшить качество регулирования. Обмен данными осуществляется через двухпортовую память, реализованную в ПЛИС. Такой способ обмена позволяет реализовать работу каждого из каналов в супервизорном режиме, отслеживая работоспособность системы. При этом важно отметить, что реализация управления на ПЛИС в общем случае надежнее реализации на микроконтроллере ввиду меньшей вероятности сбоя микросхемы (но в то же время габариты ПЛИС меньше, чем при использовании дискретного набора компонент). Также несомненным плюсом схемы является возможность программировать ПЛИС непосредственно с микроконтроллера, т.е. без необходимости очного участия оператора.
Положение ротора в каждый момент времени определяется по сигналу датчиков 1, 2 положения, расположенных на плате блока управления, т.е. неподвижных относительно статора, вокруг вала ротора. Сигналы от датчиков, проходя через операционные усилители (ОУ), поступают на блок аналогово-цифровых преобразователей (АЦП), отдельно для микроконтроллера 8 и ПЛИС 7.
Также устройство имеет разъемы для подключения датчиков 3, 4 температуры. Данное техническое решений позволяет контролировать тепловой режим работы двигателя и предотвращать перегрев устройства, что особенно важно в управлении двигателем-маховиком космического аппарата.
Еще одна группа датчиков, обработка сигналов с которых проводится для контроля правильной работы схемы - датчики 5, 6 силы тока. Независимые группы датчиков, соответствующие разным каналам управления, замеряют силу тока на обмотках статора, на отдельных каналах электропитания.
Ток на обмотках двигателя определяется работой двух групп широтно-импульсных модуляторов (ШИМ). Драйверы одной группы ШИМ управляются сигналами микроконтроллера 8, драйверы второй - сигналами ПЛИС 7. Как было отмечено выше, каждая группа по отдельности обеспечивает управление двигателем при неисправности второй группы.
Связь блока управления с внешними системами 18 (например, с бортовым компьютером КА) организована по нескольким интерфейсам. Использование различных групп контроллеров 14, 15 (CAN1 и Space Wire) и 16, 17 (CAN2 и RS422) обеспечивает независимое взаимодействие соответственно с обоими управляющими каналами на ПЛИС 7 и на микроконтроллере 8. Таким образом, CAN канал является полностью резервированным, а остальные используются для расширения функциональности изделия.
Схема электропитания блока управления также построена из соображений сохранения максимально возможной работоспособности схемы при сбоях. Два независимых канала питания рассчитаны на работу от 10 В до 32 В. С помощью импульсных преобразователей напряжения разделяется на множество каналов разного напряжения. Питание всех компонентов схемы происходит через массив автоматических ключей с индикацией неисправности. Таким образом, блок управления защищен от протекания избыточных токов в случае короткого замыкания на каком-либо из элементов схемы.
Устройство рассчитано на работу в системах с шинной архитектурой питания, поэтому по умолчанию рекуперативное торможение запрещено, так как может ухудшить совместимость устройств на шине. В качестве устройств, ограничивающих обратный ток, используются полевые транзисторы с контролем направления протекания тока - супер-диоды.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |
| Исполнительный механизм системы управления | 2015 |
|
RU2607490C2 |
| Система управления электроприводом транспортного средства | 2018 |
|
RU2690532C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БЕСКОЛЛЕКТОРНЫМ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2173931C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ ВЕНТИЛЬНО-ИНДУКТОРНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2007 |
|
RU2368059C2 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ С ФАЗНЫМ РОТОРОМ | 2023 |
|
RU2821722C1 |
| СПОСОБ СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385530C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2021 |
|
RU2780757C1 |
Изобретение относится к области электротехники и может быть использовано в составе управляющих двигателей-маховиков (УДМ) систем ориентации и стабилизации космических аппаратов (КА) и в областях, где требуется высокоточное управление бесколлекторными электрическими двигателями и устойчивость к сбоям компонентов блока управления. Техническим результатом является повышение точности управления бесколлекторными электродвигателями, обеспечение выносливости к разрушающим факторам и техническим сбоям, создание блока управления, адаптированного под широкий спектр питающего напряжения. Блок управления бесколлекторным электрическим двигателем включает два независимых канала питания, снабженных автоматическими ключами для защиты от протекания избыточного тока, канал управления на микроконтроллере и канал управления на программируемой логической интегральной схеме (ПЛИС), и выполнен с возможностью комбинирования независимых каналов управления для повышения производительности вычислений, в котором каждый из независимых каналов управления снабжен соответствующей группой датчиков, включающей датчики положения ротора, а также датчики температуры и датчики силы тока для самодиагностики исправности, подключенные соответственно ко входу микроконтроллера и ПЛИС, выходы которых связаны с соответствующей группой инверторов, при этом микроконтроллер канала управления и ПЛИС взаимосвязаны, по меньшей мере, с одним соответствующим микроконтроллером, обеспечивающим связь с внешним управляющим устройством. Блок управления снабжен ПЗУ, к которому ПЛИС имеет прямой доступ, а микроконтроллер канала управления имеет доступ, опосредованный через ПЛИС. В качестве датчиков положения ротора могут быть использованы датчики Холла. Два независимых канала управления способны работать как единый канал с повышенной производительностью вычислений, обеспечен подбор элементной базы, защита компонентов схемы автоматическими ключами. 1 з.п. ф-лы, 1 ил.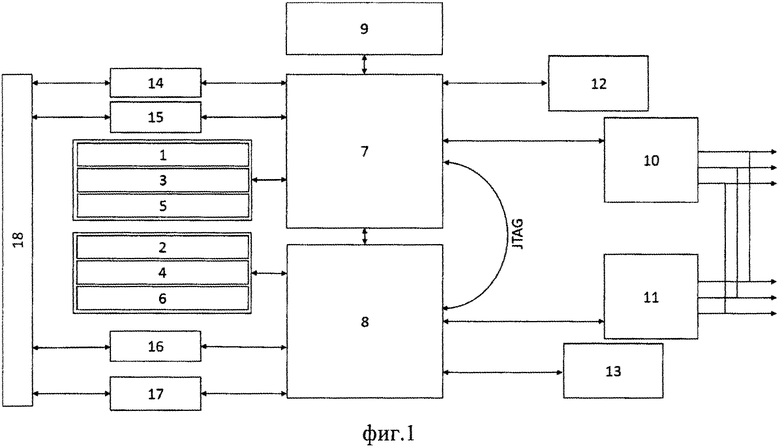
1. Блок управления бесколлекторным электрическим двигателем, включающий два независимых канала питания, снабженных автоматическими ключами для защиты от протекания избыточного тока, канал управления на микроконтроллере и канал управления на ПЛИС, выполненный с возможностью комбинирования независимых каналов управления для повышения производительности вычислений, в котором каждый из независимых каналов управления снабжен соответствующей группой датчиков, включающей датчики положения ротора, а также датчики температуры и датчики силы тока для самодиагностики исправности, подключенные соответственно ко входу микроконтроллера и ПЛИС, выходы которых связаны с соответствующей группой инверторов, при этом микроконтроллер канала управления и ПЛИС взаимосвязаны, по меньшей мере, с одним соответствующим микроконтроллером, обеспечивающим связь с внешним управляющим устройством, причем блок управления снабжен ПЗУ, к которому ПЛИС имеет прямой доступ, а микроконтроллер канала управления имеет доступ, опосредованный через ПЛИС.
2. Блок управления по п. 1, отличающийся тем, что в качестве датчиков положения ротора использованы датчики Холла.
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2007 |
|
RU2366069C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2011 |
|
RU2475922C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ МОМЕНТОМ ДВИГАТЕЛЯ-МАХОВИКА | 2012 |
|
RU2521617C2 |
| СПОСОБ СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385530C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ-МАХОВИКОМ | 1980 |
|
SU1840113A1 |
| ВОДКА | 2001 |
|
RU2193055C1 |
| DE 19815425 A1, 14.10.1999 | |||
| US 4761599 A, 02.08.1988 | |||
| WO 9517780 A1, 29.06.1995. | |||

