ел
с

| название | год | авторы | номер документа |
|---|---|---|---|
| АНТИШОКОВАЯ ПОДВЕСКА | 2018 |
|
RU2676843C1 |
| СИСТЕМА ДЕМПФИРОВАНИЯ ВЕРТИКАЛЬНЫХ КОЛЕБАНИЙ КУЗОВА ЖЕЛЕЗНОДОРОЖНОГО ПАССАЖИРСКОГО ВАГОНА | 2008 |
|
RU2386063C1 |
| АКТИВНАЯ ПОДВЕСКА СИДЕНЬЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2363598C1 |
| Устройство и способ демпфирования колебаний кузова и рам тележек железнодорожного подвижного состава | 2023 |
|
RU2800218C1 |
| СПОСОБ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ МНОГООПОРНОГО ТРАНСПОРТНОГО СРЕДСТВА И ЕГО СИСТЕМА ПОДРЕССОРИВАНИЯ | 1993 |
|
RU2041080C1 |
| Активная подвеска опорных катков транспортного средства | 2021 |
|
RU2769740C1 |
| Активный привод ведущего колеса транспортного средства | 2021 |
|
RU2767642C1 |
| СПОСОБ И СИСТЕМА СТАБИЛИЗАЦИИ КОРПУСА ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2501668C1 |
| Гидропневматическая подвеска для транспортного средства | 1990 |
|
SU1791167A1 |
| УПРАВЛЯЕМАЯ ПОДВЕСКА | 2003 |
|
RU2240930C1 |
Изобретение относится к транспортным средствам. Цель изобретения -- улучшение эксплуатационных характеристик подг-еск+1 путем повышения быстродействия и обеспечение регулирования частоты собственных колебаний подвески в широком диапазоне частоты. В систему подвески введены датчик 9 диагностики работоспособности и датчик 11 механических колебаний подвески, соединенный с функциональным преобразователем 8, органы регулирования 3 каждой пневморессоры 1 автономно подсоединены к блоку 13 управлений функционального преобразователя 8, в качестве рабочего тела гидродемпфера 6 применена мэгнитореологическая жидкость, а сопротивление гидродемпфера 6 регулируется посредством электромагнитного управления вязкостью рабочего тела. 3 з. п. ф-лы, 1 ил.
Изобретение относится к транспортным средствам, в частности к пнепмргид- равлическим подвескам ходовой части транспортных средств.
Цель изобретения - улучшение эксплуатационных характеристик подвески путем повышения быстродействия и обеспечения регулирования частоты собственных колебаний подвески в широком диапазоне частот.
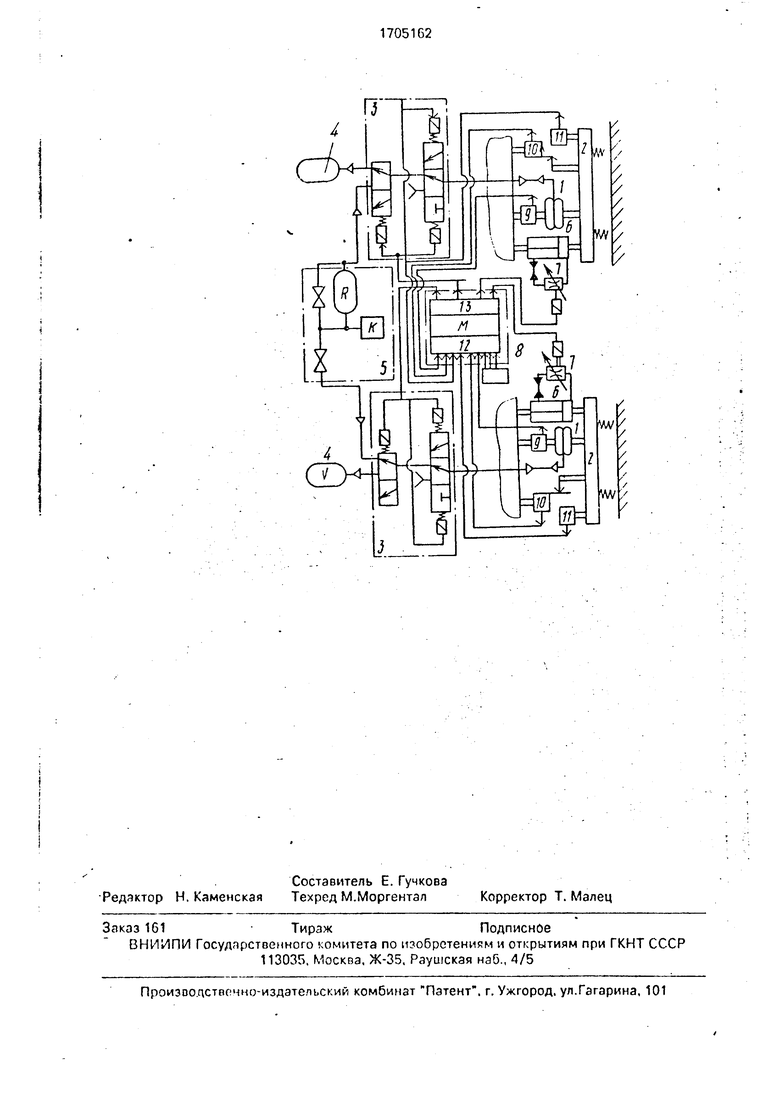
На чертеже показана принципиальная схема предпагасмой системы подсоски многоопорной ходовой части транспортного средства.
Система подпески содерхит ш:епг«о- рессоры 1 с оперными элементами 2, регулирующие питаны 3. дополнительные объемы 4, источник 5 дапления, гидрагяиче- CKveдемпфсры 6 колебаний с устройствами 7 изменения вязкости рабочего тела, функциональный преобразователь 8,
В систему подвески введены одновременно датчики 9 диагностики работоспособности пневморсссоры 1 и опорных элементов 2 (например, динамометрический датчик силы), датчики 10уровня высоты платформы транспортного средства и датчики 11 механических колебаний подвески, подключенные ко входам электронного блока 12 сравнения функционального преобразователя 8.
Четырехпозицпонный электроуправля- емып клапан 3 (например, шаророй) размещен в магистрали между пневморесссрой 1, дополнительным объемом 4 и источником 5 давления, автономно подключенного к выходам электронного блока 13 управления функционального преобразователя 8. При этом четырехпозишюнный клапан 3 выполняет также функции отсечного и/или быстрого выхлопа ооздуха пневморессоры 1 о атмосферу.
Ч|
О
ел
о ю
В качестве рабочего тола гидродсмпфе- ра 6 использована магнитореологическая жидкость, вязкость которой регулируется с помощью электромагнитного устройства 7, .осгель которого выполнен о виде шнека- сердечн. ; мощенного внутри соленоида.
В качестве датчика 11 механических колебаний применен акселерометр, выполняющий также функцию датчика скорости.
Система нногоопорной ходовой части транс/юртного средства работает сдедую- щим образом.
Платформа транспортного средства при изменении и перемещении нагрузки, при изменении скорости движения и рельефа пути, от других внешних воздействий и их комбинаций отклоняется от горизонтального положения и от заданного уровня высоты пола. Всякие отклонения от заданного положения пола отслеживаются датчиком 10 уровня высоты платформы транспортного средства, электрические сигналы с которого поступают на вход электронного блока
12 сравнения Функционального преобразователя 8. На другие входы электронного блока 12 псступают сигналы сдатчиков 9 о работоспособности пневморессор 1 и опорных элементов 2 и с датчиков 11 - о частоте вынужденных колебаний подвески и о скорости движения транспортного средства. На основании непрерывного сравнения в функциональном преобразователе 8 поступающей с датчиков информации, фактического и заданного положений платформы транспортного средства, электронный блок
13 управления регулирует характеристики пневморессор 1 и гидродемпферов 6. В качестве электронного блока 13 управления может быть использован микропроцессор.
Для увеличения жесткости пневморес- соры 1 ее полость по команде с электронного блока 13 управления подключается через электронно управляемый клапан 3 к источнику 5 давления, при этом уровень высоты платформы повышается, о чем датчик 10 сообщает в функциональный преобразователь 8. При достижении заданного уровня высоты платформы полость пневморессоры 1 по команде электронного блока 13 отключается клапаном 3 от источника 5 давления.
Для уменьшения жесткости пневморессоры ее полость по команде электронного блока 13 подключается с помощью клапана 3 к дополнительному объему 4 до того момента, когдт дчгчик 10 сооСпцит в электронный блок 12 о МОУСМ положении платформы, соответствующем заданному.
Для быстрого снижения уровня высоты платформы транспортного средства полость пноиморессоры 1 по команде электронного блока 13 сообщается с атмосферой. В этом случае клапан 3 выполняет функцию клапана быстрого выхлопа.
Таким образом осуществляется активная обратная связь; датчик 10, функциональный преобразователь 8, электропневмоклапан 3, пневморессора 1, благодаря которой платформа транспортно0 го средства постоянно поддерживается в близком к номинальному положении по высоте и крену и в параллельном дорожному полотну.
В случае выхода из строя какой-либо из
5 пневморессор 1 или опорного элемента 2, о чем датчик 9 сообщает в блок 12 сравнения функционального преобразователя 8, электронный блок 13 управления которого от-, ключает с помощью электропневмоклапана
0 3 поврежденную опору от дополнительного объема 4 с источником 5 давления и от выхлопа в атмосферу. Одновременно с этим электронный блок 13 управления переключается на соответствующий вариант не5 штатной программы регулирования системы подвески ходовой части транспортного средства, по которой осуществляется перераспределение функций поврежденной пневморессоры на смежные.
0 В режиме регулирования жесткости пневморессор для выравнивания положения платформы транспортного средства система подвески ходовой части подвергается вынужденным колебаниям. Для уменьше5 ния амплитуды колебаний применяются гасителиколебаний, например гидравлические демпферы, содержащие гидравлический дроссель с изменяемым проходным сечением.
0В предлагаемой системе подвески для регулирования сопротивления гидродемпфера не требуется изменять проходное сечение в дроссельном канале.
Устройство электромагнитного управ5 ления сопротивлением, посредством изменения вязкости рабочего тела, гидродемпфера в предлагаемой системе подвески работает следующим образом. По сигналам от датчика 11 механиче0 ских колебаний подвески в соответствии с заложенной в функциональном преобразователе 8 программой сопротивление гидро- демпфера б регулируется по команде электронного блока 13 управления посред5 ством изменения напряжения на обмотке соленоида. При этом изменяется напряженность магнитного поля п канале дроссельного устройства, образованном лопастями шнека-сердечника и корпусом дросселя, и. в результате магнитореологического эффекта изменяется вязкость магнитор ;ологиче- ской хпдкости, проходящей через дроссель. Изменег .п пчзкости рабочего тола гидро- демпфер, ; олсчег за собой соответствующее изменение гидравлического сопротивления дросселя.
При определенной напряженности, магнитного поля можно добиться практически нулевого расхода через дроссель из-за образования в его ганзле ориентированных структур из ферромагнитных частиц, которые рм необходимости разрушаются путем снятия магнитного поля.
При подключении обмотки дроссельного устройства к цепи электропитания образуется, магнитное поле, ориентированное вдоль оси шнека-сердечника. При этом за счет движения ферромагнитной суспензии по спиральному каналу дросселя она подвергается воздействию поперечного магнитного потока, в результате чего ее эффективная вязкость резко возрастает.
Непосредственное воздействие электромагнитного полл в дросселе на рабочую магниторС О/югическую жидкость позволяет повысить быстродействие и упростить процесс управления гидродемпфером 6, исключить резонансные колебания подпески.
Датчик 11 механических колебаний подвески подает информацию о частоте и амплитуде колебаний в электронный блок 12 сравнения функционального преобразователя 8, в памяти которого заложены значения собственных и резонансных частот- колебаний подвески. При приближении вынужденных частот колебаний подвески к критическим значениям электронный блок 13 управления подает соответствующую ко- манду на изменение напряжения в обмотке устройства электромагнитного управления сопротивлением гидродемпфера б.
В результате почти мгновенного изменения вязкости рабочего тела и. следовательно,, сопротивления гидродемпфера 6, амплитуда колебаний уменьшается, частота собственных колебаний подвески изменяется и, таким образом, исключаются резонансные колебания.
Система подвески многоопориой ходовой части транспортного средства и способ регулирования ее характеристик с наибольшей эффективностью применимы в многоопорных транспортных средствах с магнитной лсвитацией, где при высоких скоростях движения значительно повышаются
требования к быстродействию и надежности автоматического регулирования характеристик подвески.
Формула изобретения
преобразователь, отличающаяся тем, что, с целью улучшения эксплуатационных характеристик подвески путем повышения быстродействия и обеспечения регулирования частоты собственных колебаний подвески, она снабжена датчиками диагностики работоспособности пневморессор и опорных элементов и датчиками механических колебаний подвески, подключенными ко входам электронного блока сравнения функционального преобразователя, к выходам электронного блока управления которого автономно подключены устройства регулирования жесткости пневморессор, размещенные в магистрали между
пневморессорами, дополнительными объемами, клапанами быстрого выхлопа и источ- ником давления и устройствами электромагнитного управления сопротивлением гидродемпферов.
,3. Система по п. 1,отличающаяся тем, что в качестве датчика механических колебаний подвески использован акселерометр, закрепленный на платформе транспортного средства и одновременно выполняющий функцию датчика скорости движения.
4, Система поп. 1,отличающаяся тем, что в качестве рабочего тела гидравлического демпфера применена мзгниторео- логическая жидкость, а дроссель устройства электромагнитного управления сопротивлением гидродемпфера выполнен в виде шнека-сердечника, размещенного внутри
соленоида.
| Запор для дверей крытых товарных вагонов | 1923 |
|
SU479A1 |
| кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
