Изобретение относится к военной и специальной технике, а именно к робототехническим комплексам, предназначенным для ведения дистанционной работы в боевых условиях: сбора и передачи разведывательной информации, огневого прикрытия, обнаружения и огневого поражения различного вида целей.
Известен мобильный робототехнический комплекс (патент RU №2364500 С2, В25J 5/00, 20.08.2009 г.), принятый за прототип. Мобильный робототехнический комплекс включает мобильный робот, пост дистанционного управления, комплект дополнительного оборудования. Мобильный робот представляет собой самоходное транспортное средство с электроприводом движителя и бортовыми источниками питания, на котором смонтированы система дистанционной связи с постом дистанционного управления, бортовая телевизионная система, которая включает отдельные видеоблоки, расположенные на звеньях многостепенного манипулятора и на корпусе транспортного средства, причем каждый видеоблок содержит видеокамеру, заключенную в защитный кожух с источниками подсветки, и по меньшей мере один из видеоблоков, выполняющий обзорные функции, расположен на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях, при этом на транспортном средстве укреплены манипулятор с захватным устройством и его приводы, система сигнализации, разъемы для подключения бортового, сервисного оборудования и зарядного устройства, кронштейны для укрепления бортового оборудования и бортовая система диагностики с бортовыми пультами управления и устройствами индикации. Мобильный робототехнический комплекс дополнительно снабжен выносной системой видеонаблюдения. Мобильный робот дополнительно включает устройство доставки выносной системы видеонаблюдения в заданную точку местности и ее оперативного развертывания, а комплект дополнительного оборудования - раздвижную телескопическую штангу-удлинитель, с узлом вертикального крепления ее в кормовой части транспортного средства мобильного робота на одном конце и узлом крепления привода наведения видеоблока, выполняющего обзорные функции, - на другом конце.
Недостатками прототипа являются:
- высокая сложность устройств для установки оборудования;
- недостаточная конструктивная жесткость установочных устройств, эксплуатирующихся в составе самоходного транспортного средства, передвигающегося в условиях пересеченной местности;
- сложность монтажных работ;
- низкая степень оптимизации компоновочных решений.
Предлагаемым изобретением решается задача по повышению эффективности и надежности роботизированных комплексов вооружений.
Технический результат, получаемый при осуществлении изобретения, заключается в создании боевого роботизированного модуля, обладающего достаточным составом функциональных средств для выполнения задач по назначению, высокой степенью оптимизации компоновочных решений, жесткостью установочных конструкций, достаточных для размещения оборудования с высокими массогабаритными показателями, эксплуатирующегося в условиях воздействия внешней и собственной вибрации.
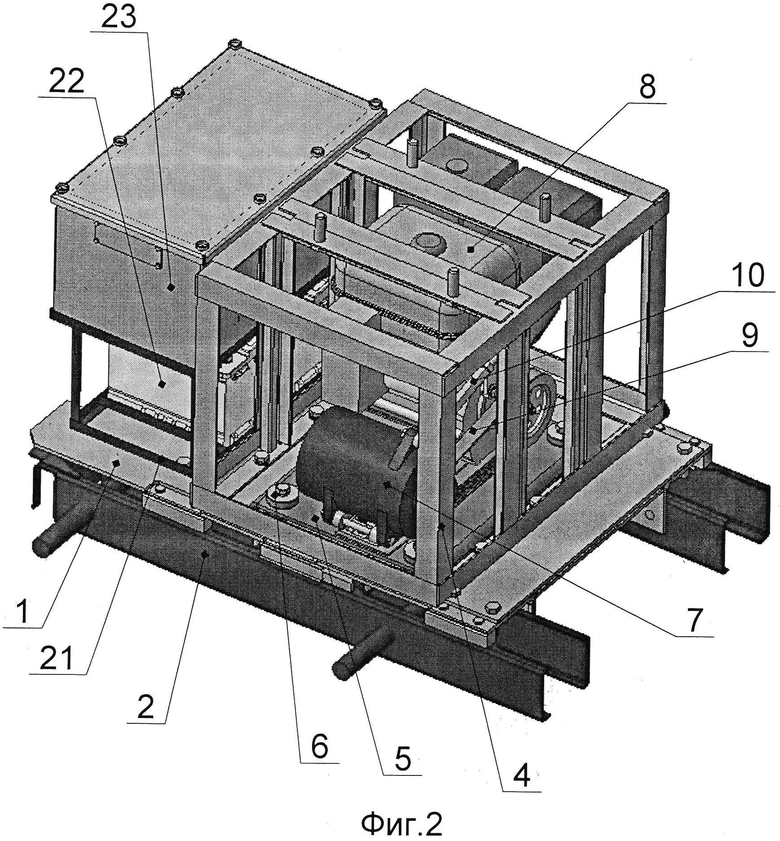
Указанный технический результат достигается тем, что в предлагаемом боевом роботизированном модуле, содержащем самоходное транспортное средство, устройства для крепления оборудования, приводные механизмы, пост дистанционного управления, бортовые источники питания, систему дистанционной связи, бортовую телевизионную систему, функциональное оборудование, новым является то, что устройства для крепления оборудования выполнены в виде плиты, размещенной на раме самоходного транспортного средства, на которой закреплена первая каркасная стойка, внутри которой на переходной плите, установленной на амортизаторах, закреплены генератор с приводом от двигателя внутреннего сгорания, связанные между собой ременной передачей и механизмом регулирования натяжения ремня, сверху на каркасной стойке размещено функциональное оборудование в виде поворотной платформы для установки системы вооружения, содержащей модули, предназначенные для размещения системы вооружения и выполнения задач по назначению: люльку, блок наблюдения и целеуказания, ящик для боекомплекта, лоток, устройство ввода, привод горизонтальный и вертикальный, блок электронный, рядом с первой каркасной стойкой, ближе к задней части транспортного средства, на плите закреплена вторая каркасная стойка, внутри которой размещены дополнительные аккумуляторные батареи, а сверху установлен контейнер для размещения аппаратных средств, выполненный в виде ящика со съемной крышкой и двумя установленными внутри ящика горизонтальными перегородками, оснащенными по углам вырезами, на боковых стенках ящика, вплотную к крышке, размещены съемные панели, привод переключения передач самоходного транспортного средства выполнен в виде электродвигателя, на валу которого установлен толкатель, связанный с рычагом переключения передач, и потенциометра, через переходную муфту соединенного с этим валом, привод управления движением самоходного транспортного средства выполнен в виде актуаторов для торможения левого и правого борта, которые через оси разобщения и рычаги торможения, закрепленные на рулевой колонке, связаны с тормозными цилиндрами левого и правого борта, привод тросика газа выполнен в виде сервомашинки с потенциометром, на валу которой установлен рычаг, связанный с тросиком газа.
Выполнение устройства для крепления оборудования в виде плиты, размещенной на раме самоходного транспортного средства, позволяет:
- сформировать плоскую установочную поверхность для размещения оборудования;
- снизить трудоемкость и удобство монтажных работ.
Размещение на плите первой каркасной стойки позволяет сформировать установочные места для размещения поворотной платформы системы вооружения и бортового генератора с приводом от двигателя внутреннего сгорания, предназначенного для электропитания оборудования и аппаратных средств, размещаемых на самоходном транспортном средстве.
Размещение внутри каркасной стойки на переходной плите, установленной на амортизаторах, генератора с приводом от двигателя внутреннего сгорания, которые связаны между собой ременной передачей и механизмом регулирования натяжения ремня, позволяет:
- оптимизировать компоновочную схему размещаемого оборудования и не занимать дополнительного объема;
- снизить внешние вибрационные воздействия, поступающие с шасси транспортного средства, снизить вибрацию от работающего двигателя и частично погасить вибрацию от использования системы вооружения;
- регулировать натяжение ремня генератора.
Размещение сверху на каркасной стойке функционального оборудования в виде поворотной платформы для установки системы вооружения позволяет:
- обеспечить удобство монтажа системы вооружения;
- обеспечить необходимый сектор обстрела как в горизонтальном, так и вертикальном направлении.
Включение в состав поворотной платформы модулей, предназначенных для размещения системы вооружения и выполнения задач по назначению, позволяет:
- осуществлять установку и закрепление на поворотной платформе системы вооружения;
-осуществлять наблюдение за контролируемой зоной;
- осуществлять передачу полного телевизионного сигнала в блок электронный;
- осуществлять заряжание системы вооружения и отвод стреляных гильз во время стрельбы;
- осуществлять прием/передачу данных от блока управления, коммутацию напряжения питания;
- выполнять поворот поворотной платформы;
- осуществлять прием/передачу данных по внутренним каналам связи;
- управлять двигателями вертикального и горизонтального перемещения, электроспуском.
Размещение рядом с первой каркасной стойкой, ближе к задней части транспортного средства, второй каркасной стойки позволяет:
- компактно установить две дополнительные аккумуляторные батареи и контейнер в виде ящика со съемной крышкой, где размещены аппаратные средства;
- рационально использовать свободное пространство на шасси транспортного средства.
Установка внутри ящика горизонтальных перегородок, оснащенных по углам вырезами, позволяет:
- разместить аппаратные средства различной конфигурации;
- проложить жгуты и кабельные каналы в наиболее удобной для электромонтажа форме.
Размещение на боковых стенках ящика, вплотную к крышке, съемных панелей позволяет:
- оптимально расположить органы управления и соединители;
- без доступа внутрь контейнера производить осмотр и при необходимости проверку, ремонт и замену органов управления и соединителей.
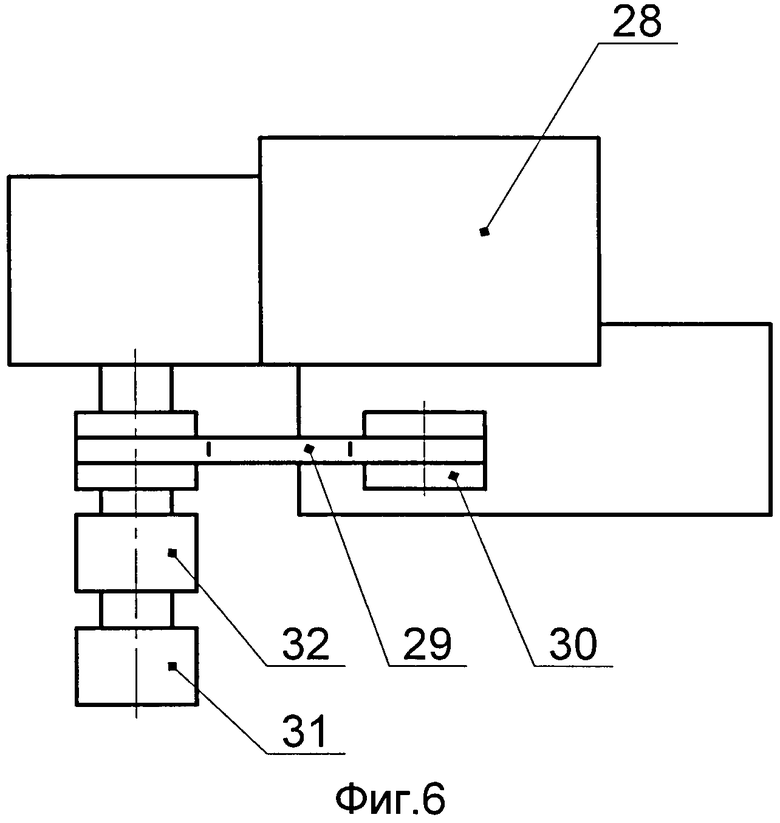
Выполнение привода переключения передач самоходного транспортного средства в виде электродвигателя, на валу которого установлен толкатель, связанный с рычагом переключения передач, и потенциометра, через переходную муфту соединенного с этим валом, позволяет:
- осуществлять переключение передач в дистанционном режиме по сигналам с поста дистанционного управления;
- определить положение, в котором находится рычаг переключения передач;
- осуществлять реверс электродвигателя.
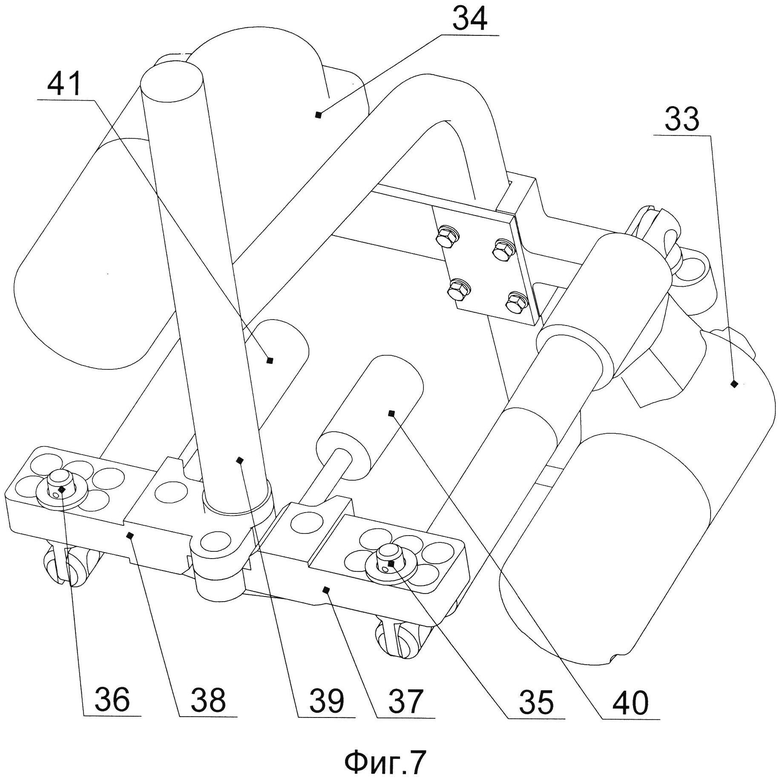
Выполнение привода управления движением самоходного транспортного средства в виде актуаторов для торможения левого и правого борта, которые через оси разобщения и рычаги торможения, закрепленные на рулевой колонке, связаны с тормозными цилиндрами левого и правого борта, позволяет:
- осуществлять в дистанционном режиме по сигналам с поста дистанционного управления поворот и торможение самоходного транспортного средства;
- обеспечить малую инерционность при отработке команд управления;
- при необходимости обеспечить быстрый переход на ручное управление.
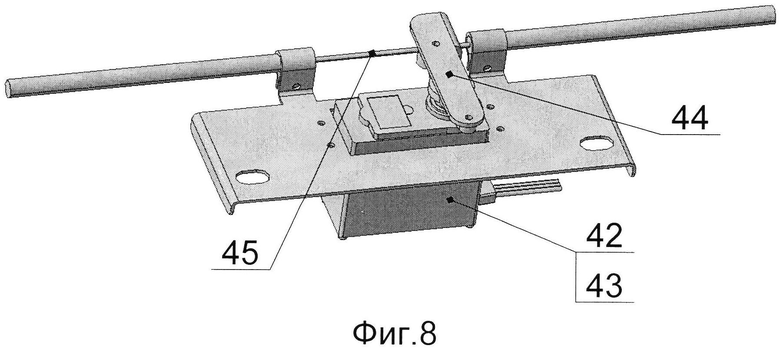
Выполнение привода тросика газа в виде сервомашинки с потенциометром, на валу которой установлен рычаг, связанный с тросиком газа, позволяет обеспечить дистанционное управление подачей топлива для обеспечения необходимого скоростного режима.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
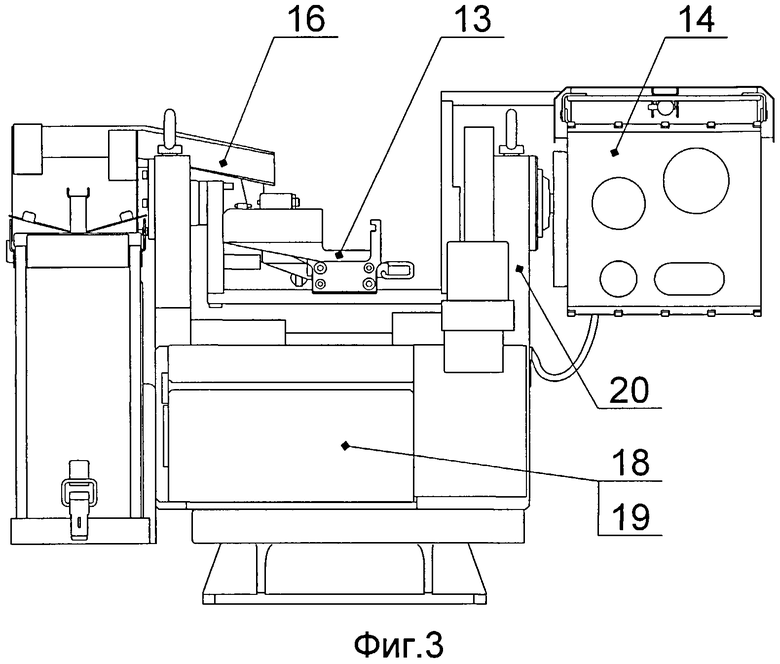
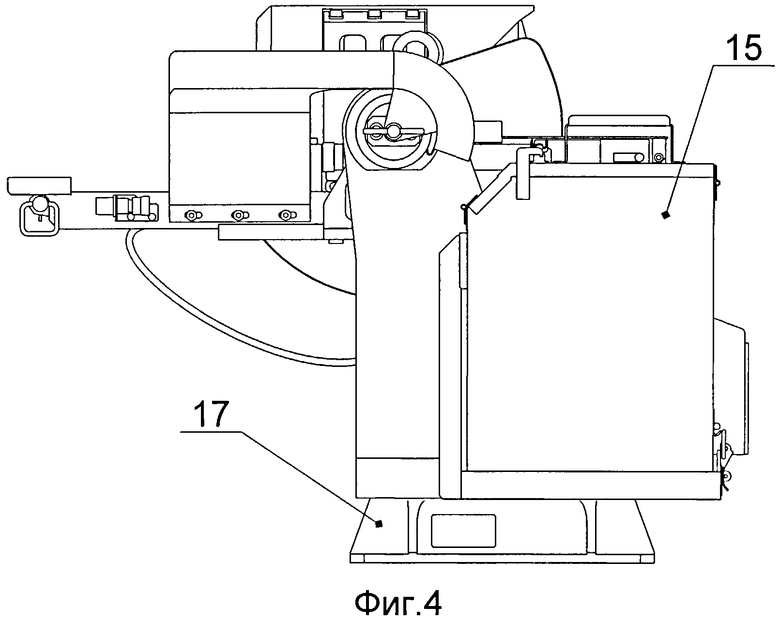
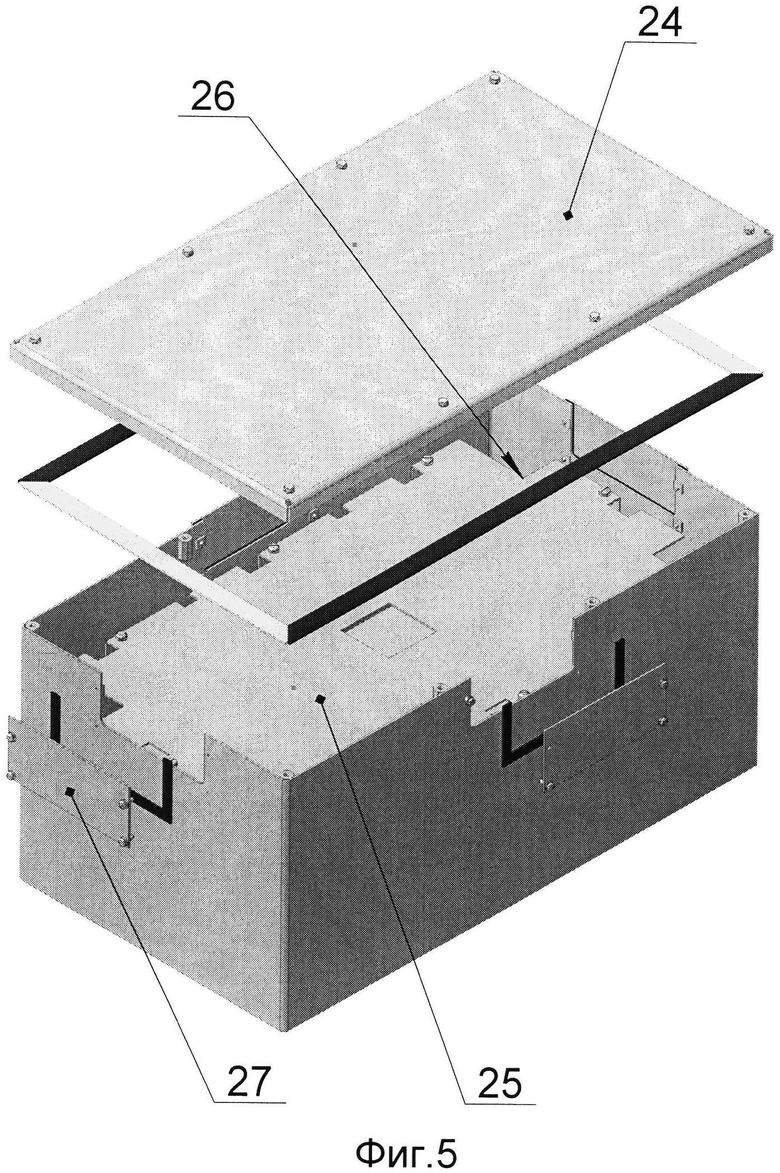
Сущность изобретения поясняется чертежами, где на фиг.1 показан общий вид боевого роботизированного модуля; на фиг.2 - размещение установочных средств и электрооборудования на плите; на фиг.3 - поворотная платформа, главный вид; на фиг.4 - поворотная платформа, вид сбоку; на фиг.5 - конструкция контейнера для размещения аппаратных средств; на фиг.6 - схема привода механизма переключения передач; на фиг.7 - схема привода управления движением; на фиг.8 - схема привода тросика газа.
Боевой роботизированный модуль содержит устройства для крепления оборудования, которые выполнены в виде плиты 1, размещенной на раме 2 самоходного транспортного средства 3, на которой закреплена первая каркасная стойка 4, внутри которой на переходной плите 5, установленной на амортизаторах 6, закреплены генератор 7 с приводом от двигателя внутреннего сгорания 8, связанные между собой ременной передачей 9 и механизмом регулирования натяжения ремня 10. Сверху на первой каркасной стойке 4 размещено функциональное оборудование в виде поворотной платформы 11 для установки системы вооружения 12, содержащей модули, предназначенные для размещения системы вооружения 12 и выполнения задач по назначению: люльку 13, блок 14 наблюдения и целеуказания, ящик 15 для боекомплекта, лоток 16, устройство ввода 17, привод 18 горизонтальный и привод 19 вертикальный, блок 20 электронный. Рядом с первой каркасной стойкой 4, ближе к задней части транспортного средства 3, на плите 1 закреплена вторая каркасная стойка 21, внутри которой размещены дополнительные аккумуляторные батареи 22, а сверху установлен контейнер для размещения аппаратных средств, выполненный в виде ящика 23 со съемной крышкой 24 и двумя установленными внутри ящика горизонтальными перегородками 25, оснащенными по углам вырезами 26. На боковых стенках ящика 23, вплотную к крышке 24, размещены съемные панели 27. Управление самоходным транспортным средством 3 и системами боевого роботизированного модуля осуществляется с поста дистанционного управления (на чертежах не показан). Привод переключения передач самоходного транспортного средства 3 выполнен в виде электродвигателя 28, на валу которого установлен толкатель 29, связанный с рычагом 30 переключения передач, и потенциометра 31, через переходную муфту 32 соединенного с валом электродвигателя 28. Привод управления движением самоходного транспортного средства 3 выполнен в виде актуатора 33 для торможения левого борта и актуатора 34 для торможения правого борта, которые связаны через оси разобщения - левую 35 и правую 36 соответственно с рычагами торможения - левым 37 и правым 38, закрепленными на рулевой колонке 39. Рычаги торможения 38 и 39 связаны с тормозным цилиндром 40 левого борта и тормозным цилиндром 41 правого борта. Привод тросика газа выполнен в виде сервомашинки 42 с потенциометром 43, на валу которой установлен рычаг 44, связанный с тросиком газа 45.
Боевой роботизированный модуль функционирует следующим образом. На плите 1, размещенной на раме 2 самоходного транспортного средства 3, закрепляются первая 4 и вторая 21 каркасные стойки, внутри которых установлено оборудование системы электропитания всех устанавливаемых на самоходном транспортном средстве 3 аппаратных и функциональных устройств. Сверху на первой 4 и второй 21 каркасных стойках закрепляются соответственно поворотная платформа 11 для установки системы вооружения 12 и ящик 23 со съемной крышкой 24 для установки аппаратных средств. Генератор 7 с приводом от двигателя внутреннего сгорания 8 является основным источником электрической энергии оборудования боевого роботизированного модуля. Регулировка натяжении ременной передачи 9 осуществляется за счет изменения длины тяги механизма регулирования натяжения ремня 10, которая изменяет угловое положение генератора 7. Аккумуляторные батареи 22 выполняют роль резервного источника питания, что позволяет поддерживать энергетический потенциал боевого роботизированного модуля. В ящике 23 размещены основные элементы системы управления как движением самоходного транспортного средства 3, так другими системами. Конструкция ящика 23, оборудованного съемной крышкой 24, двумя установленными внутри ящика горизонтальными перегородками 25, оснащенными по углам вырезами 26, съемными панелями 27, позволяет обеспечить удобство монтажа, обслуживания аппаратных средств. После установки поворотной платформы 11 на первой каркасной стойке 4 производится монтаж системы вооружения 12 в люльке 13. Система вооружения 12 устанавливается таким образом, чтобы направление ведения огня соответствовало направлению движения самоходного транспортного средства 3 и ствол находился в горизонтальном положении. Далее производится заряжание системы вооружения 12 и укладка боекомплекта в ящик 15. После выдвижения боевого роботизированного модуля в заданную точку с помощью блока 14 наблюдения и целеуказания осуществляется наблюдение за контролируемой зоной. Полученные данные через блок электронный 20 и устройство ввода 17 передаются на пост дистанционного управления. С поста дистанционного управления через эти же блоки осуществляется управление горизонтальным 18 и вертикальным 19 приводами поворотной платформы 11. Для снижения внешних вибрационных воздействий на генератор 7 с двигателем внутреннего сгорания 8, поступающих с шасси транспортного средства 3, снижения вибрации от работающего самого двигателя 8, частичного гашения вибрации от использования системы вооружения 12 предназначены амортизаторы 6, на которых установлена переходная плита 5.
Электропривод переключения передач предназначен для переключения передач в дистанционном режиме. При подаче напряжения на электродвигатель 28 толкатель 29 начинает давить на рычаг 30, тем самым переключая передачу. При смене полярности на электродвигателе 28 он начинает вращать вал в обратном направлении, тем самым переключая передачу в обратное положение. Для определения положения, в котором находится рычаг 30 переключения передач в данный момент, на приводе установлен потенциометр 31 с сопротивлением 20 кОм. В зависимости от положения вала сопротивление в цепи потенциометра 31 меняется. Данная связь нужна для того, чтобы остановить вращения вала в нужной точке. На валу электродвигателя 28 установлена переходная муфта 32, служащая для исключения несоостности вала электродвигателя 28 и вала потенциометра 31.
Привод управления движением работает следующим образом: при подаче напряжения на линейный актуатор 33 или 34 - шток актуатора выдвигается и начинает давить на тормозной цилиндр 40 или 41 через рычаг торможения 37 или 38, закрепленный на рулевой колонке 39. Поворот осуществляется торможением одного из бортов самоходного транспортного средства 3, для этого выжимается один из тормозных цилиндров, в зависимости от того, в какую сторону необходимо повернуть. Торможение осуществляется путем выжимания обоих тормозных цилиндров 40 и 41. Для перехода на ручное управление необходимо разобщить оба тормозных рычага 37 и 38 и шток актуатора 33 и 34, демонтировав для этого оси разобщения 35 и 36.
Электропривод тросика газа служит для управления подачей топлива дистанционно. При подаче определенного напряжения на сервомашинку 42 ее вал поворачивается. На валу расположен рычаг 44, который связан с тросиком газа 45, при натяжении которого происходит обогащение или обеднение топливной смеси. Для обратной связи на сервомашинке 42 установлен потенциометр 43, по изменению сопротивления которого можно определить текущее положение вала. Вал может вращаться как по часовой стрелке, так и против часовой стрелки в пределе ±30°.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании боевого роботизированного модуля, обладающего достаточным составом функциональных средств для выполнения задач по назначению, высокой степенью оптимизации компоновочных решений, жесткостью установочных конструкций, достаточных для размещения оборудования с высокими массогабаритными показателями, эксплуатирующегося в условиях воздействия внешней и собственной вибрации.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2021 |
|
RU2783879C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2559194C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| Роботизированный диагностический комплекс технической разведки | 2018 |
|
RU2709640C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| БРОНИРОВАННЫЙ ПЛАВАЮЩИЙ МНОГОЦЕЛЕВОЙ КОМПЛЕКС | 2009 |
|
RU2422754C2 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
Изобретение относится к военной и специальной технике, а именно к робототехническим комплексам, предназначенным для ведения дистанционной работы в боевых условиях, на фиг.8 - схема привода тросика газа. Боевой роботизированный модуль содержит устройства для крепления оборудования, которые выполнены в виде плиты, размещенной на раме самоходного транспортного средства. На раме закреплена первая каркасная стойка, внутри которой на переходной плите, установленной на амортизаторах, закреплены генератор с приводом от двигателя внутреннего сгорания, связанные между собой ременной передачей и механизмом регулирования натяжения ремня. Рядом с первой каркасной стойкой, ближе к задней части транспортного средства, на плите закреплена вторая каркасная стойка, внутри которой размещены дополнительные аккумуляторные батареи, а сверху установлен контейнер для размещения аппаратных средств, выполненный в виде ящика. На боковых стенках ящика размещены съемные панели. Управление самоходным транспортным средством и системами боевого роботизированного модуля осуществляется с поста дистанционного управления. Привод переключения передач самоходного транспортного средства выполнен в виде электродвигателя, на валу которого установлен толкатель, связанный с рычагом переключения передач. Достигается упрощение установки оборудования и повышение надежности роботизированного модуля. 8 ил.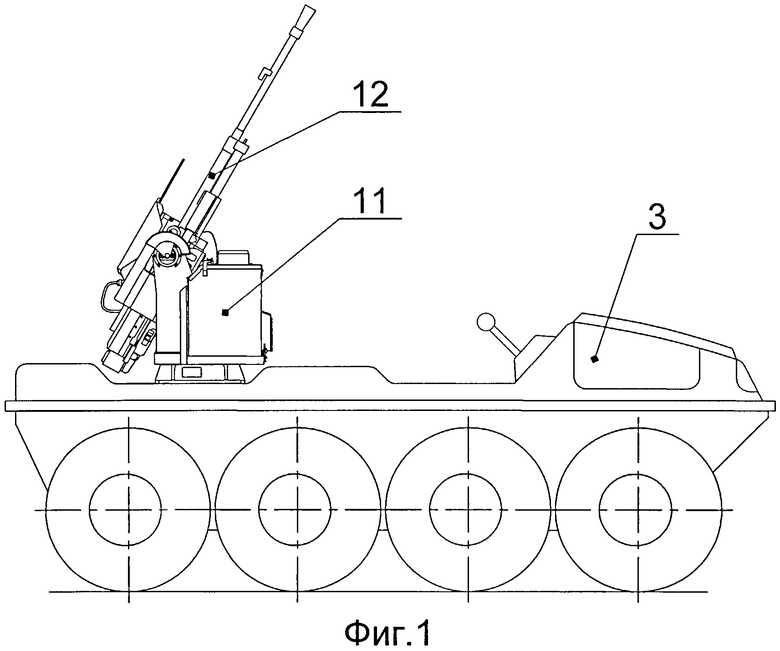
Боевой роботизированный модуль, содержащий самоходное транспортное средство, устройства для крепления оборудования, приводные механизмы, пост дистанционного управления, бортовые источники питания, систему дистанционной связи, бортовую телевизионную систему, функциональное оборудование, отличающийся тем, что устройства для крепления оборудования выполнены в виде плиты, размещенной на раме самоходного транспортного средства, на которой закреплена первая каркасная стойка, внутри которой на переходной плите, установленной на амортизаторах, закреплены генератор с приводом от двигателя внутреннего сгорания, связанные между собой ременной передачей и механизмом регулирования натяжения ремня, сверху на каркасной стойке размещено функциональное оборудование в виде поворотной платформы для установки системы вооружения, содержащей модули, предназначенные для размещения системы вооружения и выполнения задач по назначению: люльку, блок наблюдения и целеуказания, ящик для боекомплекта, лоток, устройство ввода, привод горизонтальный и вертикальный, блок электронный, рядом с первой каркасной стойкой, ближе к задней части транспортного средства, на плите закреплена вторая каркасная стойка, внутри которой размещены дополнительные аккумуляторные батареи, а сверху установлен контейнер для размещения аппаратных средств, выполненный в виде ящика со съемной крышкой и двумя установленными внутри ящика горизонтальными перегородками, оснащенными по углам вырезами, на боковых стенках ящика, вплотную к крышке, размещены съемные панели, привод переключения передач самоходного транспортного средства выполнен в виде электродвигателя, на валу которого установлен толкатель, связанный с рычагом переключения передач, и потенциометра, через переходную муфту соединенного с этим валом, привод управления движением самоходного транспортного средства выполнен в виде актуаторов для торможения левого и правого борта, которые через оси разобщения и рычаги торможения, закрепленные на рулевой колонке, связаны с тормозными цилиндрами левого и правого борта, привод тросика газа выполнен в виде сервомашинки с потенциометром, на валу которой установлен рычаг, связанный с тросиком газа.
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2364500C2 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ МОБИЛЬНЫЙ РОБОТ, ВИДЕОКАМЕРА МОБИЛЬНОГО РОБОТА, ЗВУКОПРИЕМНАЯ СИСТЕМА САМОНАВЕДЕНИЯ МОБИЛЬНОГО РОБОТА, СФЕРИЧЕСКАЯ ГРАНАТА | 2011 |
|
RU2473863C1 |
| Устройство для вычерчивания профиля русла рек | 1928 |
|
SU12815A1 |
| Система гашения механических колебаний, передающихся от строительной части сооружений на комплектное электрооборудование и/или программно-технические комплексы атомных электростанций (АЭС) | 2019 |
|
RU2709273C1 |
| Дульная насадка к стрелковому оружию | 2020 |
|
RU2741155C1 |
| US 4932831 A, 12.06.1990 | |||
| Устройство для изготовления полимерной композиции | 1988 |
|
SU1562019A1 |

