Изобретение относится к военной и специальной технике, а именно к робототехническим комплексам, предназначенным для дистанционной работы в условиях боевых действий, а также в труднодоступных и опасных для присутствия человека местах.
Известна роботизированная транспортная платформа (см. патент RU №2506157 С1, В25J 5/00, F41Η 13/00, 10.02.2014 г.), принятая за прототип. Роботизированная транспортная платформа содержит самоходное управляемое транспортное средство с приводом и бортовыми источниками электропитания, пульт дистанционного управления, систему управления движением, систему связи и передачи данных, комплект функционального оборудования, систему технического зрения, приводы исполнительных механизмов. В качестве самоходного управляемого транспортного средства выбран колесный движитель повышенной проходимости с приводом от двигателя внутреннего сгорания, комплект функционального оборудования выполнен в виде боевого модуля для ведения стрельбы по различным видам целей в дневных и ночных условиях, линейные электродвигатели системы управления движением платформы электрически связаны с сервоусилителями и механически с правым и левым рулевыми механизмами, коробкой переключения передач, рычаг газа механически связан с сервомашинкой, система управления движением оснащена ультразвуковыми датчиками обнаружения объектов, платформа оснащена системой топопривязки и навигации, включающей инерциальную систему ориентации в пространстве, спутниковую навигационную систему и два одометра, информационно-вычислительной системой, состоящей из двух бортовых компьютеров и магистрально-модульной платформы, для выполнения вспомогательных операций платформа оснащена аппаратурой для обеспечения резервной связи по каналам системы связи и передачи данных, система связи и передачи данных оснащена коммутатором и двумя маршрутизаторами для работы по основному и резервному каналам радиосвязи. Сервоусилители, сервомашинка, ультразвуковые датчики обнаружения объектов системы управления движением, инерциальная система ориентации в пространстве, спутниковая навигационная система и одометры системы топопривязки и навигации, бортовая аппаратура транспортного средства - тахометр и спидометр, видеокамеры системы технического зрения по каналам информационного обмена связаны с информационно-вычислительной системой, электропитание осуществляется от автономного источника, установленного на транспортном средстве.
Недостатками прототипа являются:
- низкая степень адаптированного «поведения» при выполнении боевой задачи в изменяющихся условиях окружающей среды;
- низкая степень точности позиционирования на местности;
- недостаточные возможности управляемого маневрирования на местности.
Предлагаемым изобретением решается задача по повышению уровня управляемости боевых робототехнических комплексов и расширение их функциональных возможностей.
Технический результат, получаемый при осуществлении изобретения, заключается в создании робототехнического комплекса, предназначенного для нужд Сухопутных войск ВС РФ и обеспечивающего реализацию следующих задач управления: локальную навигацию и глобальную навигацию подвижной платформы робототехнического комплекса, управление ее движением, функционирование высокоскоростного канала связи, управление специальным оборудованием.
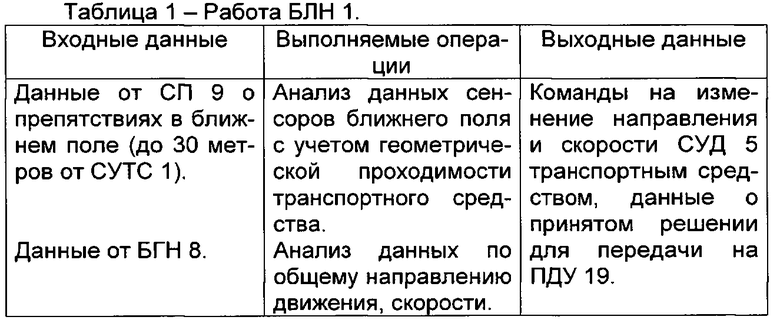
Указанный технический результат достигается тем, что в предлагаемом робототехническом комплексе, содержащем самоходное управляемое транспортное средство, пульт дистанционного управления, систему управления движением, систему навигации, включающую инерциальную систему ориентации в пространстве, спутниковую навигационную систему и два одометра, систему связи и передачи данных, комплект специального оборудования, систему технического зрения, исполнительные механизмы, новым является то, что система навигации робототехнического комплекса выполнена в виде двух блоков: блока локальной навигации и блока глобальной навигации, которые оснащены сенсорной подсистемой, блок локальной навигации выполнен с возможностью обработки входных данных от сенсорной подсистемы о препятствиях в ближнем поле зрения и выдачи команд по каналу связи на изменение направления и скорости движения в этом поле системе управления движением транспортного средства и данных о принятом решении для передачи на пульт дистанционного управления, блок глобальной навигации выполнен с возможностью обработки входных данных в виде команд с пульта дистанционного управления, данных для начальной привязки и определения текущих координат, дирекционного угла продольной оси робототехнического комплекса, данных для привязки робототехнического комплекса к шкале единого времени, данных для сохранения географических координат пройденного пути и их передачу оператору, данных для отображения маршрута движения на цифровой карте местности в реальном масштабе времени и выдачи данных о направлении и скорости движения на цифровой карте местности в реальном масштабе времени.
Выполнение системы навигации робототехнического комплекса в виде двух блоков: блока локальной навигации и блока глобальной навигации, которые оснащены сенсорной подсистемой, позволяет:
- обеспечить получение системой навигации информации от всех установленных на робототехническом комплексе датчиков, способных такую информацию предоставить;
- обеспечить автоматическое маневрирование робототехнического комплекса при преодолении непосредственно возникающих по ходу движения препятствий;
- обеспечить автономное движение робототехнического комплекса во всем заданном районе работ.
Функционирование блока локальной навигации позволяет:
- обеспечить обработку данных с сенсоров ближнего поля обзора (до 30 метров от транспортного средства);
- учесть геометрическую проходимость транспортного средства робототехнического комплекса.
Функционирование блока глобальной навигации позволяет:
- автоматически проводить начальную привязку робототехнического комплекса;
- непрерывно определять текущие координаты, дирекционный угол продольной оси комплекса;
- отображать маршрут движения на цифровой карте местности в реальном масштабе времени.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
Сущность изобретения поясняется чертежом, где показана структурная схема роботизированной транспортной платформы.
Робототехнический комплекс содержит самоходное управляемое транспортное средство (СУТС) 1, основными элементами которого являются двигатель (Д) 2 и трансмиссия (Т) 3 и на которых установлены исполнительные механизмы управления (ИМУ) 4. ИМУ 4 связаны с системой управления движением (СУД) 5. Система навигации (СН) 6 функционально разделена на два блока: блок локальной навигации (БЛН) 7 и блок глобальной навигации (БГН) 8, которые оснащены сенсорной подсистемой (СП) 9, включающей в себя несколько типов сенсоров: одометры (Од) 10, энкодеры (Эн) 11, инерциальная система ориентации в пространстве (ИСОП) 12, спутниковая навигационная система (СНС) 13, ультразвуковые датчики (УД) 14, система технического зрения (СТЗ) 15, радиолокаторы (РЛ) 16. Кроме того, робототехнический комплекс оснащен блоком управления спецоборудованием (БУСО) 17. Спецоборудование установлено на СУТС 1 для выполнения задач по назначению. СУД 5, СН 6 и БУСО 17 через систему связи и передачи данных (ССПД) 18 связаны с пультом дистанционного управления (ПДУ) 19.
Робототехнический комплекс функционирует следующим образом. По выполняемым задачам оборудование, установленное на СУТС 1, можно разделить на следующие основные системы и блоки: БЛН 7, БГН 8, СУД 5, ССПД 18, БУСО 17.
БЛН 7 представлен в таблице 1.
БГН 8 представлен в таблице 2.

СУД 5 представлена в таблице 3.

ССПД 18 представлена в таблице 4.

БУСО 17 представлен в таблице 5.

Очевидно, что система взаимодействия блоков и систем робототехнического комплекса является неоднородной по структуре, быстродействию и решаемым задачам.
Для выполнения оценки требуемого быстродействия БЛН 7 принимаем заданную скорость движения 25 км/ч, постоянную времени механической части системы 1 с (время реакции приводов).
Расстояние, проходимое транспортным средством за 1 с
S=25000/3600=6,9 м.
Дальность действия сенсоров ближнего поля принимаем равной 30 м.
Время с момента обнаружения препятствия до столкновения составит:
t=30/6,9=4,3 с.
Таким образом, с учетом постоянной времени механической части время реакции должно быть не хуже 4,3-1=3,3 сек. на одиночное препятствие.
Следует отметить, что данная цифра идеализирована, и рассматривает случай движения по идеально ровной поверхности и одиночного препятствия.
В реальных условиях быстродействие БЛН 7 должно быть выше на два - три порядка, так как имеется комплексирование параметров движения СУТС 1. Поэтому на первый план выходит вопрос формирования СП 9.

Приведенный набор параметров и сенсоров является минимально необходимым для решения задачи управления СУТС 1 в полуавтономном и автономном режиме.
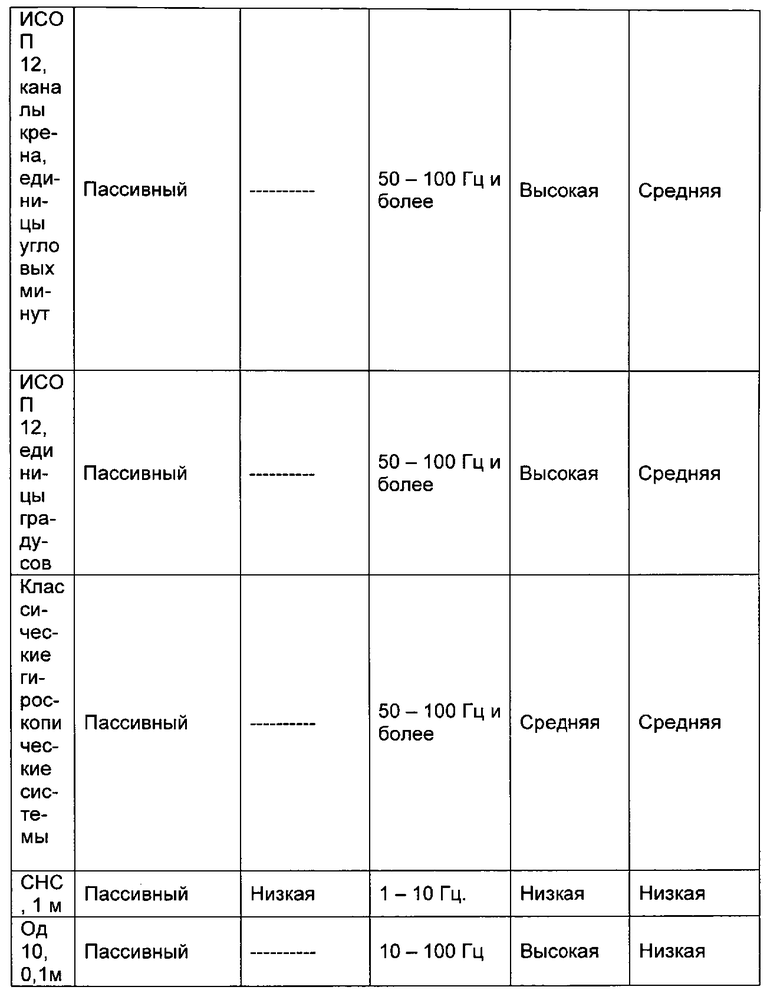
Рассмотрим перечисленные выше сенсоры, классифицируем их по ряду параметров.
Тип получения информации:
Активный - сенсор оказывает воздействие на окружающую среду, излучает зондирующий сигнал.
Пассивный - сенсор не оказывает воздействия.
Внешняя заметность (для сенсоров измерения расстояния до препятствия, навигационных сенсоров):
Высокая - работа сенсора обнаруживается человеком или простейшими техническими средствами.
Средняя - работа сенсора обнаруживается техническими средствами.
Низкая - сенсор не обнаружим.
Защищенность:
Высокая - сенсор стоек к естественным внешним воздействиям (погодные условия, помехи от движения СУТС 1) и активному подавлению.
Средняя - сенсор стоек к естественным внешним воздействиям.
Низкая - сенсор не стоек к указанным факторам.
Требуемая вычислительная мощность:
Высокая - большой поток данных от сенсора, требует сложной обработки для формирования команды управления, требуется внешний модуль обработки.
Средняя - средняя сложность обработки, может быть реализована на уровне сенсора.
Низкая - сенсор выдает непосредственно информацию или требует минимальной ее обработки.

Раскроем некоторые свойства перечисленных выше сенсоров:
1. Техническое зрение - стереоскопическое машинное зрение на основе обработки пары 2D изображений и реконструкции 3D окружения по стереопаре - требует очень высоких вычислительных мощностей, но в то же время практически не обнаружимо. Для обнаружения и подавления необходимо применение лазерных сканирующих систем или постановка дымовых завес с поглощением в широком спектральном диапазоне.
2. Смешенный тип технического зрения - системы с использованием структурной подсветки, лазерного сканирования. Реконструкция 3D изображения по данным одного 2D изображения. Требует средних вычислительных мощностей, может быть обнаружено приборами, реагирующими на ИК или лазерное излучение.
3. Радиолокация - на основе сантиметровых и миллиметровых волн, микромощные излучатели на диодах Ганна или магнетронах. При применении антенных решеток не имеют движущихся частей и обладают высокой стойкостью к погодным явлениям. В то же время могут быть обнаружены и подавлены средствами радиоэлектронной борьбы. Без оборудования не обнаружимы. Требуемая вычислительная мощность сильно зависит от схемотехнического решения системы и в некоторых случаях может быть минимальной, т.е вся обработка данных может быть реализована в блоке локатора.
4. Классические гироскопические системы - малоприменимы на мобильных робототехнических комплексах по причине больших габаритов и большого энергопотребления относительно других типов сенсоров.
Исходя из этого, рекомендован следующий состав СП 9.

Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании робототехнического комплекса, обеспечивающего реализацию следующих задач управления: локальную навигацию и глобальную навигацию подвижной платформы робототехнического комплекса, управление ее движением, функционирование высокоскоростного канала связи, управление специальным оборудованием.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА БОЕВОГО ПРИМЕНЕНИЯ | 2013 |
|
RU2523874C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ БОЕВЫХ ДЕЙСТВИЙ | 2013 |
|
RU2533229C2 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ | 2020 |
|
RU2737684C1 |
| УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ НАВИГАЦИИ РОБОТА В ПОЛЯХ ГАММА-ИЗЛУЧЕНИЯ | 2009 |
|
RU2390799C1 |
| Робототехнический комплекс для ведения разведки и огневой поддержки | 2017 |
|
RU2686983C2 |
Робототехнический комплекс содержит самоходное управляемое транспортное средство, пульт дистанционного управления, систему управления движением, систему навигации, систему связи и передачи данных, комплект специального оборудования, систему технического зрения, исполнительные механизмы. Система навигации содержит сенсорную подсистему, инерциальную систему ориентации в пространстве, выполненную в виде блока локальной навигации, и спутниковую навигационную систему, выполненную в виде блока глобальной навигации, два одометра. Обеспечивается высокая управляемость подвижной платформы робототехнического комплекса. 1 ил., 8 табл.
Робототехнический комплекс, содержащий самоходное управляемое транспортное средство, пульт дистанционного управления, систему управления движением, систему навигации, включающую инерциальную систему ориентации в пространстве, спутниковую навигационную систему и два одометра, систему связи и передачи данных, комплект специального оборудования, систему технического зрения, исполнительные механизмы, отличающийся тем, что система навигации робототехнического комплекса выполнена в виде двух блоков: блока локальной навигации и блока глобальной навигации, которые оснащены сенсорной подсистемой, блок локальной навигации выполнен с возможностью обработки входных данных от сенсорной подсистемы о препятствиях в ближнем поле зрения и выдачи команд по каналу связи на изменение направления и скорости движения в этом поле системе управления движением транспортного средства и данных о принятом решении для передачи на пульт дистанционного управления, блок глобальной навигации выполнен с возможностью обработки входных данных в виде команд с пульта дистанционного управления, данных для начальной привязки и определения текущих координат, дирекционного угла продольной оси робототехнического комплекса, данных для привязки робототехнического комплекса к шкале единого времени, данных для сохранения географических координат пройденного пути и их передачи оператору, данных для отображения маршрута движения на цифровой карте местности в реальном масштабе времени и выдачи данных о направлении и скорости движения на цифровой карте местности в реальном масштабе времени.
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
| ИНФОРМАЦИОННО-АНАЛИТИЧЕСКИЙ КОМПЛЕКС НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА | 2010 |
|
RU2428660C1 |
| КОМПЛЕКСНАЯ СПУТНИКОВАЯ НАВИГАЦИОННАЯ АППАРАТУРА | 2005 |
|
RU2294527C1 |
| Устройство для подачи наполнителя в скважину | 1985 |
|
SU1348500A1 |
| JP 4732023 B2, 27.07.2011 | |||

