ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к электрическому инструменту и, более конкретно, к электрическому инструменту, в котором работающая часть активируется вращением двигателя в прямом и обратном направлениях, а в качестве двигателя применяется бесщеточный электродвигатель.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В качестве электрического инструмента, в котором рабочая часть активируется вращением двигателя в прямом и обратном направлениях, известна машина для вязки арматурных стержней проволокой (например, JP-А-2003-267307). В этой машине для вязки арматурных стержней в качестве приводного двигателя обычно применяют щеточный двигатель. Щеточный двигатель применяют потому, что, при этом, несмотря на его маленький размер, можно получить высокий крутящий момент, а, кроме того, применение щеточного двигателя позволяет уменьшить размеры машины.
В традиционных машинах для вязки арматурных стержней, как описано выше, датчики положения располагают на нескольких положениях, в рабочей части как средства определения момента переключения вращения щеточного двигателя из прямого вращения до остановки или вращения в обратную сторону с тем, чтобы, в зависимости от того, миновал двигатель положение датчика или нет, можно было узнать состояние рабочей части. Однако для управления сложными операциями по переключению вращения требуется ряд датчиков, а для того, чтобы получить информацию высокой точности о местонахождении, требуется этап регулировки положений датчиков.
К тому же, в случае оценки положения двигателя отслеживанием времени на базе определенной исходной точки существует проблема, состоящая в том, что в результатах может произойти большая ошибка в найденном положении, так как скорость двигателя изменяется в соответствии с изменением напряжения аккумулятора.
Кроме того, когда резкое ускорение и торможение повторяются в течение короткого периода времени, есть опасение, что могут произойти следующие проблемы.
1. Каждый раз при прямом или обратном вращении двигателя протекает интрузивный электрический ток и обмотка нагревается. Когда полярность щетки переключается во время вращения для быстрого переключения направления вращения, образуются искры, при этом щетка может истереться и появится потребность ее замены.
2. До окончания срока службы двигателя рабочие характеристики двигателя (число оборотов, ускорение) ухудшаются и, следовательно, неизбежно ухудшаются рабочие характеристики машины.
3. При ухудшении рабочих характеристик двигателя машина не может использоваться эффективно, при этом потребление энергии увеличивается. При питании от батарей их нужно часто заряжать, так как уменьшается время работы машины на одну зарядку. В результате срок эксплуатации батареи уменьшается.
Более того, фаза ротора и момент синхронизации обмотки возбуждения физически определяются структурой щеточного двигателя. Поэтому, в случае, когда двигатель эффективно работает в прямом направлении, он не будет работать эффективно в обратном направлении, производя большой шум. В связи с этим существует проблема, состоящая в том, что нельзя ожидать эффективного управления щеточным двигателем, когда сочетаются прямое и обратное вращения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Один или более вариантов осуществления изобретения предоставляют электрический инструмент, который может устойчиво функционировать в течение продолжительного периода времени и не нуждаться в техническом обслуживании и ремонте, благодаря использованию бесщеточного двигателя вместо щеточного двигателя.
В соответствии с одним или более вариантов осуществления изобретения электрический инструмент, в котором рабочая часть активируется повторяющимся вращением двигателя в прямом направлении и в обратном направлении один или более раз, снабжается датчиком, определяющим положение ротора двигателя, в котором один или оба параметра, число оборотов и/или положение двигателя при вращении измеряется обнаруживающим сигналом датчика, а рабочее состояние рабочей части определяется по результатам измерений.
В соответствии с вышеприведенным описанием электрического инструмента число оборотов и положение ротора при вращении можно оценивать по обнаруживающему сигналу датчика. Вследствие этого отпадает необходимость предусматривать много датчиков положения, обнаруживающих рабочее состояние рабочей части, таким образом, появляется возможность снизить количество компонентов и получить информацию о местоположении, которую можно проанализировать с высокой точностью на основании числа оборотов двигателя. В результате этап регулировки датчиков положения, подтверждения работ и т.д. можно ограничить, а производительность увеличить. Одновременно исчезают проблемы, связанные с неисправностями датчиков положения и, следовательно, можно выполнить электрический инструмент улучшенного качества.
Электрический инструмент можно обеспечить ограничительным средством для ограничения электрического тока, приводящего в движение двигатель и, кроме того, механизм ограничения может регулировать электрический ток так, что электрический ток может быть ограничен до предельных значений, по меньшей мере, в два этапа.
В соответствии с вышеприведенным описанием электрического инструмента, если требуется большой крутящий момент (большой крутящий момент прикладывается, когда требуется быстрый разгон), двигатель можно приводить в движение большим током в цепи двигателя, а если достаточно небольшого крутящего момента, двигатель можно приводить в движение небольшим током в цепи двигателя. В результате потребление электрического тока можно снизить, а нагрев двигателя можно ограничить.
Более того, электрический инструмент может иметь, по меньшей мере, три датчика, а двигатель может включать в себя бесщеточный двигатель.
В соответствии с вышеприведенным описанием электрического инструмента, благодаря применению вместо щеточного двигателя бесщеточного двигателя, в котором исключается сама щетка, являющаяся фактором эксплуатационной долговечности двигателя, и, следовательно, можно значительно увеличить ресурс электрического инструмента.
Датчики можно расположить в положениях, смещенных по фазе от среднего положения между соответствующими зубцами статора на 30°±θ°, управляющая часть, управляющая вращением двигателя, может регулировать управляющий сигнал, приводящий в движение двигатель на основании результатов обнаружения положения ротора датчиками, и при этом управляющая часть может выбирать обнаруживающий сигнал датчиков так, чтобы взаимосвязь между ротором и обнаруживающим сигналом датчиков могла быть равноценной и при прямом вращении, и при обратном вращении ротора.
В соответствии с вышеприведенным описанием электрического инструмента, располагая датчики в положениях, смещенных по фазе от среднего положения между соответствующими зубцами статора в 30° при вращении в обратном направлении, момент подачи напряжения можно определить заранее и при прямом вращении и при обратном вращении. Вследствие этого вращение ротора возможно и в прямом направлении, и в обратном направлении при эффективном угле опережения двигателя.
Кроме того, электрический инструмент можно обеспечить ограничительным средством для ограничения электрического тока, приводящего в движение двигатель, и при этом ограничительное средство может регулировать электрический ток так, что может ограничить электрический ток до предельного значения, по меньшей мере, в два этапа.
В соответствии с вышеприведенным описанием электрического инструмента эффективное функционирование можно получить и при прямом вращении, и при обратном вращении. Так как для требуемого крутящего момента можно подавать небольшой электрический ток, его предельное значение можно установить низким. Вследствие этого можно дополнительно ожидать такие преимущества, как уменьшение потребления тока и ограничение нагрева двигателя.
Другие аспекты и преимущества изобретения станут очевидны из последующего описания, чертежей и формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 представляет собой пояснительный вид, показывающий электрический инструмент в примере осуществления изобретения.
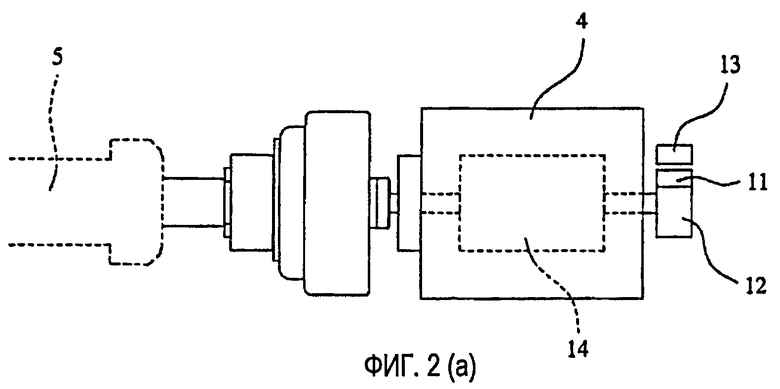
Фиг.2(а) представляет собой вид спереди, поясняющий взаимосвязь щеточного двигателя с датчиком.
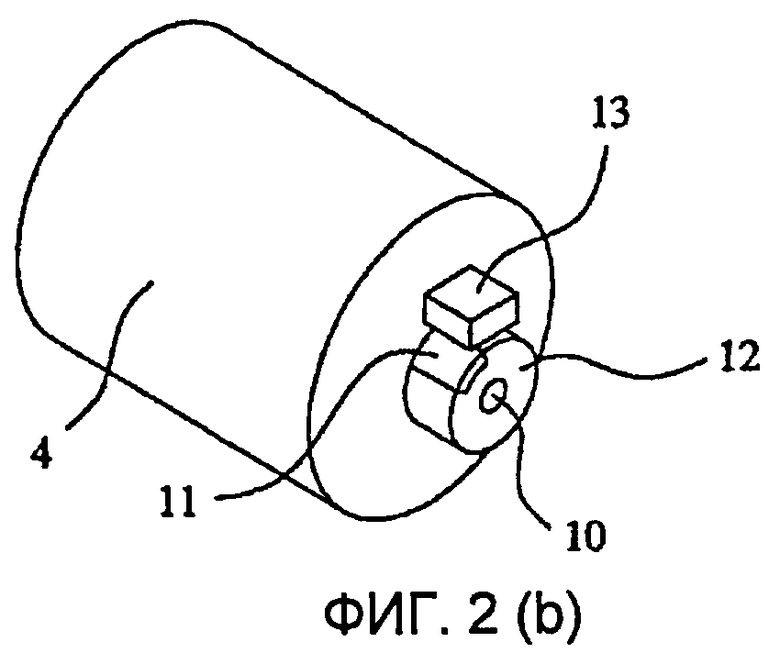
Фиг.2(b) представляет собой вид сбоку в перспективе, поясняющий взаимосвязь между щеточным двигателем и датчиком.
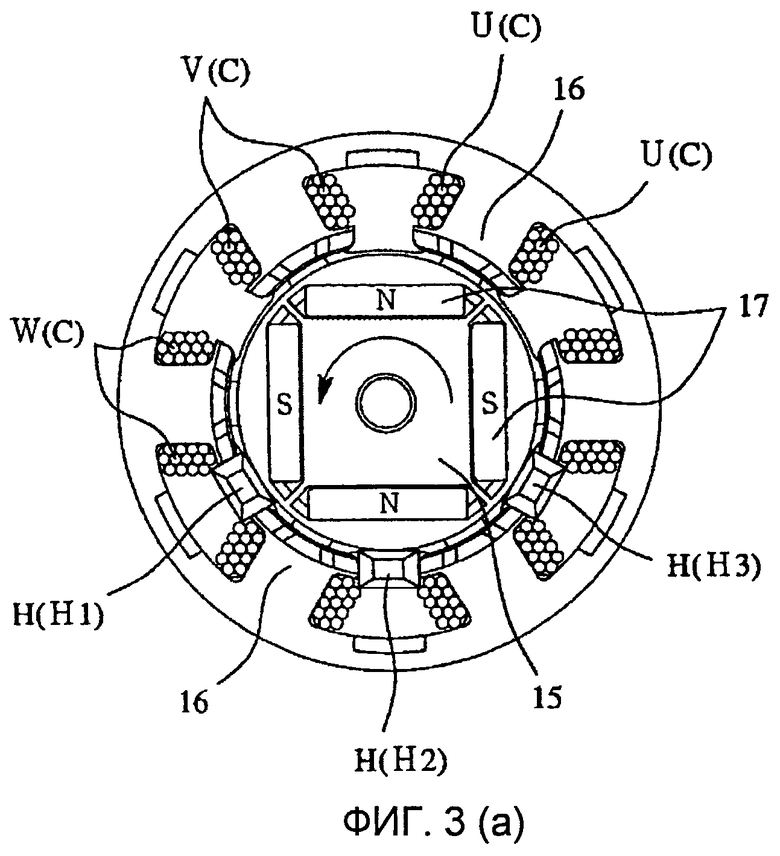
Фиг.3(а) представляет собой вид, поясняющий положение датчиков, установленных на бесщеточном двигателе.
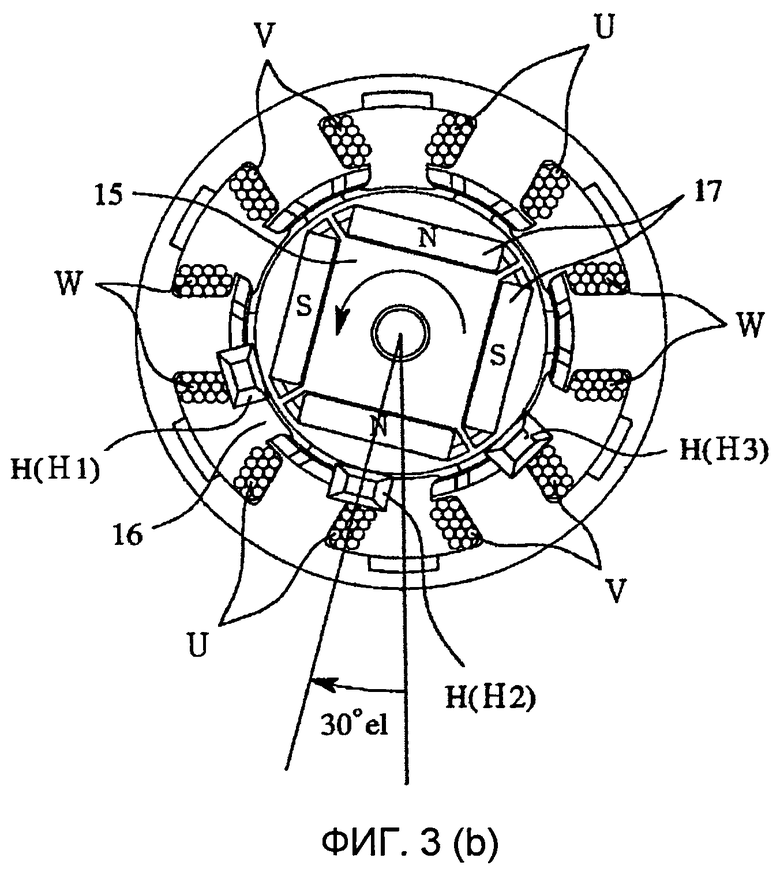
Фиг.3(b) представляет собой вид, поясняющий положение датчиков, установленных на бесщеточном двигателе.
Фиг.4 представляет собой принципиальную схему, поясняющую привод в действие бесщеточного двигателя.
Фиг.5(а) представляет собой временную диаграмму, поясняющую взаимосвязь между датчиками и приводными сигналами инвертора при прямом вращении бесщеточного двигателя.
Фиг.5(b) представляет собой временную диаграмму, поясняющую взаимосвязь между датчиками и приводными сигналами инвертора при обратном вращении бесщеточного двигателя.
Фиг.6 представляет собой пояснительный вид бесщеточного двигателя в другом варианте осуществления.
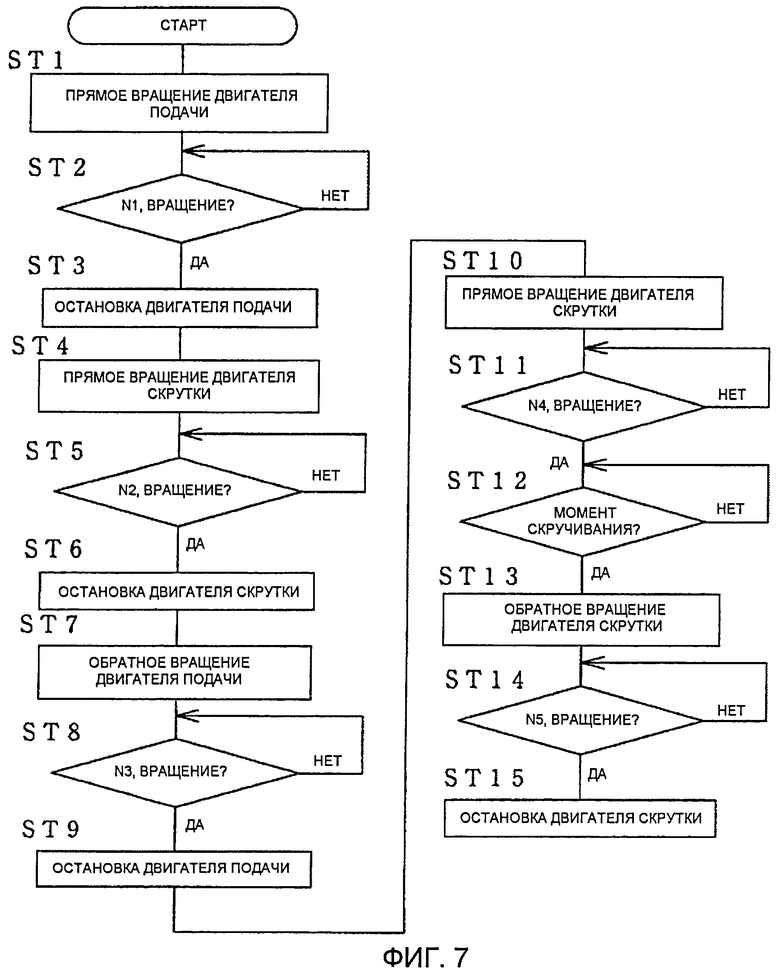
Фиг.7 представляет собой блок-диаграмму управления последовательностью действий машины для вязки арматурных стержней вращением ряда двигателей.
Фиг.8 представляет собой блок-диаграмму, поясняющую восстановление машины для вязки арматурных стержней, после того как произошел отказ.
Фиг.9 представляет собой вид, поясняющий изменения электрического тока, протекающего к двигателю машины для вязки арматурных стержней и электрического тока после регулировки.
Фиг.10 представляет собой принципиальную схему, по которой производится управление электрическим током.
Наименование номеров положения и знаков
4 двигатель
15 ротор
16 зубец статора
20 управляющая часть
21 инвертор
А Электрический инструмент
Н Датчик
ЛУЧШИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Фиг.1 показывает электрический инструмент «А» в варианте осуществления в соответствии с изобретением. В последующем описании в качестве примера осуществления изобретения будет описан случай, где изобретение применяется к машине для вязки арматурных стержней, которая производит связывание арматурных стержней. В данной машине для вязки арматурных стержней «А», проволока 100 подается из картриджа 1 к направляющему кронштейну 3 с помощью электродвигателя 2 подачи. После того, как проволока 100 намотается на арматурные стержни 200, вращается двигатель 4 скрутки, и арматурные стержни связываются проволокой 100. Двигатель подачи 2 вращается в прямом направлении, благодаря чему проволока 100 наматывается вокруг арматурных стержней. Затем двигатель 4 скрутки вращается в прямом направлении, передвигая муфту (рабочую часть) 5, которая скользит вперед, и крюк 6, имеющийся на дальнем конце муфты 5, захватывает проволоку 100. После чего двигатель 2 подачи вращается в обратном направлении, выбирая провисание проволоки 100. Затем двигатель 4 скрутки опять вращается в прямом направлении, продвигая муфту 5 вперед, и срабатывает резак 7, связанный с муфтой 5, отрезая проволоку 100.
В этом состоянии крюк 6 захватывает часть проволоки 100, которая намотана вокруг арматурных стержней 200. Если двигатель 4 скрутки продолжает вращаться в прямом направлении, продвигая муфту 5 вперед, муфта 5 отсоединяется от стопора (не показан), который не позволяет муфте 5 вращаться, и муфта 5 начинает вращаться. Затем крюк 6, выполненный на дальнем конце муфты 5, также вращается заодно с муфтой 5 и скручивает захваченную проволоку 100, благодаря чему связывает арматурные стержни 200. После связки арматурных стержней 200 двигатель 4 скрутки вращается в обратном направлении, освобождая проволоку 100, захваченную крюком 6, а муфта 5 возвращается в начальную точку.
В машине для вязки арматурных стержней, которая рассматривается в примере осуществления изобретения, магнитный блок 12, выполненный, по существу, в форме диска, на части своей периферийной поверхности имеет магнитный датчик 11, который прикреплен к вращающемуся валу 10 двигателя 4, как показано на фиг.2. Обнаруживающий датчик 13, например, такой как датчик Холла, или индукционная катушка, чутко реагирующая на магнитный датчик 11, выполнен рядом с магнитным блоком 12. В случае, когда обнаруживающий датчик 13 представляет собой датчик Холла, число вращений ротора 14 можно определить из цикла изменений в магнитном потоке, а положение ротора 14 можно определить по электрическому напряжению. В случае, когда обнаруживающий датчик 13 представляет собой индукционную катушку, число вращения ротора можно определить как аналоговое значение из индуктивного напряжения, а положение муфты 5 можно определить по положению при вращении и числу вращения ротора 14. Таким способом можно оценить положение муфты 5, не пользуясь обнаруживающим датчиком положения. Например, относительно подачи муфты 5, положение, в котором находится муфта 5, можно определить по определенному числу прямых вращений ротора.
В случае, когда положение машины определяется по времени работы, ее состояние невозможно определить точно, потому что скорость двигателя изменяется в соответствии с изменением напряжения. Однако состояние машины можно определить независимо от скорости, определяя его из числа вращения.
Обычно в качестве двигателя 4 скрутки применяется щеточный двигатель потому, что для двигателя скрутки требуются небольшие размеры и большой крутящий момент. Однако щеточные двигатели обладают множеством недостатков, как описано выше при описании проблем предыдущего уровня техники. По этой причине в примере осуществления изобретения вместо щеточного двигателя применяется бесщеточный двигатель (например, бесщеточный двигатель, имеющий шесть пазов и четыре полюса) в качестве данного двигателя 4 скрутки.
В таком двигателе 4 скрутки положение ротора 15 определяется тремя датчиками Н. Согласно результата обнаружения электрический ток проходит к обмотке С статора, а ротор 15 вращается в результате притяжения и отталкивания между электромагнитными полями, генерируемыми в зубцах 16 статора и электромагнитных сил постоянных магнитов 17 ротора 15. В тех случаях, когда датчики Холла Н (Н1, Н2, и Н3), обнаруживающие положение ротора 15, расположены посередине (угол опережения 0 градусов) между двумя зубцами статора 16, как показано на фиг.3(а), одинаковые рабочие характеристики получаются и при прямом вращении и при обратном вращении. Однако напряжение необходимо подать раньше, с учетом времени запаздывания электрического тока в результате индуктивности обмоток, относительно момента протекания электрического тока, генерирующего наибольший крутящий момент. По этой причине в случае, когда ротор 15 имеет встроенные постоянные магниты 17, необходимо протекание тока к обмотке статора С также раньше вышеупомянутого момента в направлении вращения для того, чтобы эффективно использовать реактивный момент. В связи с этим в этом изобретении для того, чтобы раньше определить момент подачи напряжения, датчики Н, определяющие положения ротора 15, расположены в положениях, смещенных по фазе от среднего положения, между двумя зубцами статора 16 на 30°, в направлении обратного вращения, как показано на фиг.3(b). Таким способом ротор можно вращать с большим крутящим моментом во время прямого вращения. Однако во время обратного вращения положение ротора 15 отстает по фазе от датчиков Н на 30° и, как следствие, ротор нельзя вращать с высоким крутящим моментом, если ток, протекающий к обмоткам статора С, управляется относительно датчиков с такой же закономерностью, что и время обратного вращения. Однако в настоящем изобретении обнаруживающие сигналы датчиков Н выбираются так, что положение ротора 15 можно определить одним и тем же способом, как при прямом вращении, так и при обратном вращении ротора 15.
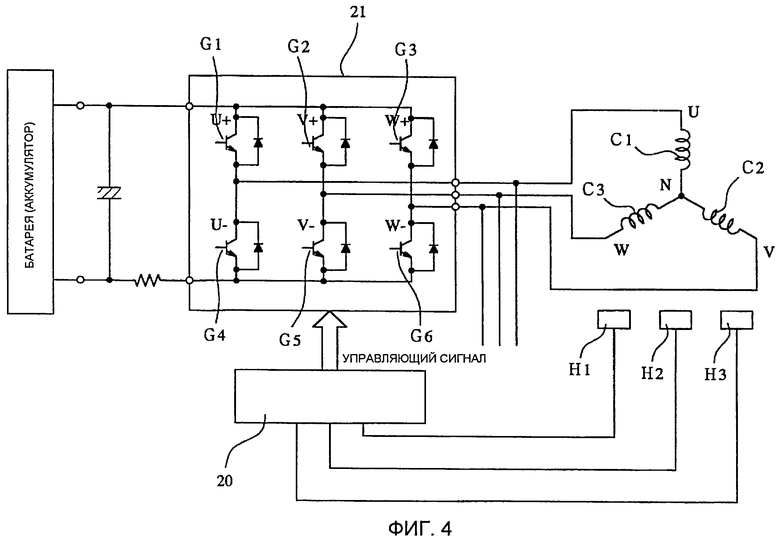
Фиг.4 представляет собой принципиальную схему, поясняющую приведение в действие двигателя 4 скрутки. Положение ротора 15 обнаруживается датчиками Холла Н1-Н3. Управляющий узел 20 выдает приводные сигналы инвертору 21 на основании результатов обнаружения датчиками Холла Н1-Н3, направляя приводные токи на обмотки статора С (С1-С3), имеющие U-фазу, V-фазу и W-фазу. Притяжение и отталкивание между генерируемыми магнитными полями и постоянными магнитами 17 ротора 15 повторяются, благодаря чему ротор 15 вращается.
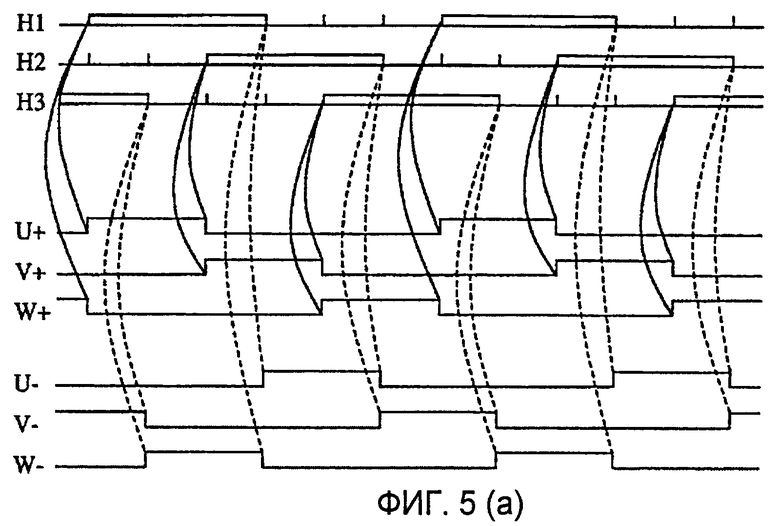
Когда ротор 15 вращается в прямом направлении, управляющий узел 20 управляет инвертором 21 так, что ток в цепи привода может протекать к обмоткам статора С1-С3, последовательно открывая вентили G1-G3 верхних ветвей (U+, V+, W+) инвертора 21, когда датчики Н1, Н2, Н3 включены, и последовательно открывая вентили G4-G6 нижних ветвей
(U-, V-, W-) инвертора 21, когда датчики Н1, Н2, Н3 выключены, как показано на фиг.5(а). С другой стороны, когда ротор 15 вращается в обратном направлении, управляющая часть 20 управляет инвертором 21 так, что ток в цепи привода может протекать к обмоткам статора С1-С3, последовательно открывая вентили G1-G3 верхних ветвей (U+, V+, W+) инвертора 21, когда датчики Н1, Н2, Н3 выключены, и последовательно открывая вентили G4-G6 нижних ветвей (U-, V-, W-) инвертора 21, когда датчики Н1, Н2, Н3 включены, как показано на фиг.5(b). Таким способом управляется направление вращения ротора 15.
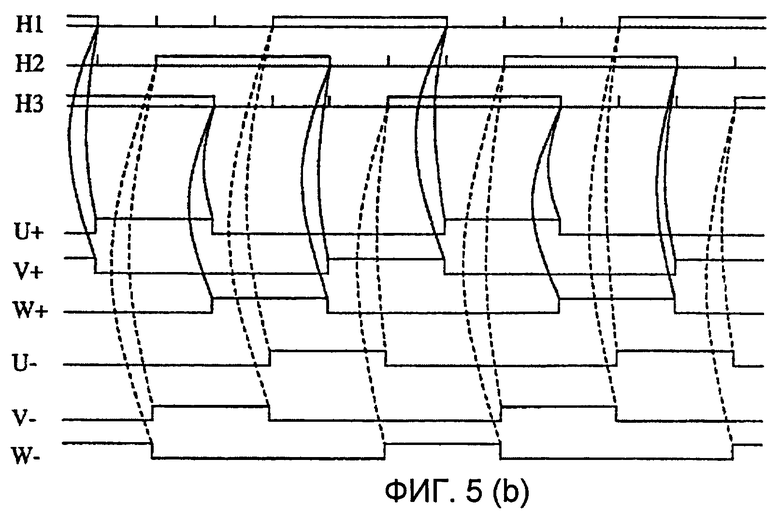
В случае, когда постоянные магниты 17, расположенные на роторе 15, изогнуты в форме дуги, как показано на фиг.6, действует большой реактивный момент. Вследствие этого подача напряжения, которая опережала по фазе, приблизительно, на 40°, в некоторых случаях будет наиболее эффективна. Считается, что в случае, когда датчики расположены так, что предпочтение может иметь любое из вращений (прямое или обратное) в зависимости от пропорций между нормальным вращением и обратным вращением машины, подача напряжения может быть уменьшена в целом. В связи с этим в случае, когда предпочтение отдается прямому вращению, датчики можно расположить так, чтобы они опережали по фазе, например, на 40°, относительно прямого вращения, а при обратном вращении расположить так, чтобы они опережали по фазе на 20°, при запуске двигателя.
Управляющий узел 20 определяет число оборотов двигателя, подсчитывая обнаруживающие сигналы датчиков Н, обнаруживающих положение ротора 15. В связи с этим таким же способом, как в случае применения щеточного двигателя, описанном выше, положение муфты 5 можно определить, не пользуясь датчиком положения. Одним словом, относительно подачи муфты 5 положение, в котором находится муфта 5, можно определить после определенного числа прямых вращений муфты 5.
Например, для объяснения обратимся к блок-схеме на фиг.7, двигатель подачи вращается, подавая проволоку (этап ST1), когда двигатель подачи закончил N1 вращение (этап ST2), считается, что проволока намотана вокруг армирующих стержней и двигатель подачи останавливается на этапе ST3. Затем в прямом положении вращается двигатель скрутки, передвигая муфту вперед (этап ST4), когда двигатель скрутки закончил N2 вращение, считается, что крюк переместился в позицию захвата проволоки (этап ST5), а двигатель скрутки останавливается на этапе ST6. В связи с этим двигатель подачи вращается в обратном направлении (этап ST7), а когда двигатель подачи закончил N3 вращение, считается, что провис проволоки удален (этап ST8). Вращение двигателя подачи останавливается на этапе ST9, а двигатель скрутки опять вращается в прямом направлении (этап ST10).
Когда двигатель скрутки закончил N4 вращение (этап ST11), считается, что муфта переместилась вперед до позиции, в которой резак для проволоки может работать и разрезает проволоку. Когда крутящий момент достигает определенного значения на этапе ST12, считается, что армирующие стержни связаны. На этапе ST13 крюк освобождается от проволоки, и в то же самое время двигатель скрутки вращается в обратном направлении, возвращая муфту в первоначальную точку. Когда двигатель скрутки закончил N5 вращение, считается, что муфта возвратилась в первоначальную точку (этап ST14), а двигатель скрутки остановился на этапе ST15, закончив, таким образом, последовательность обвязочных работ.
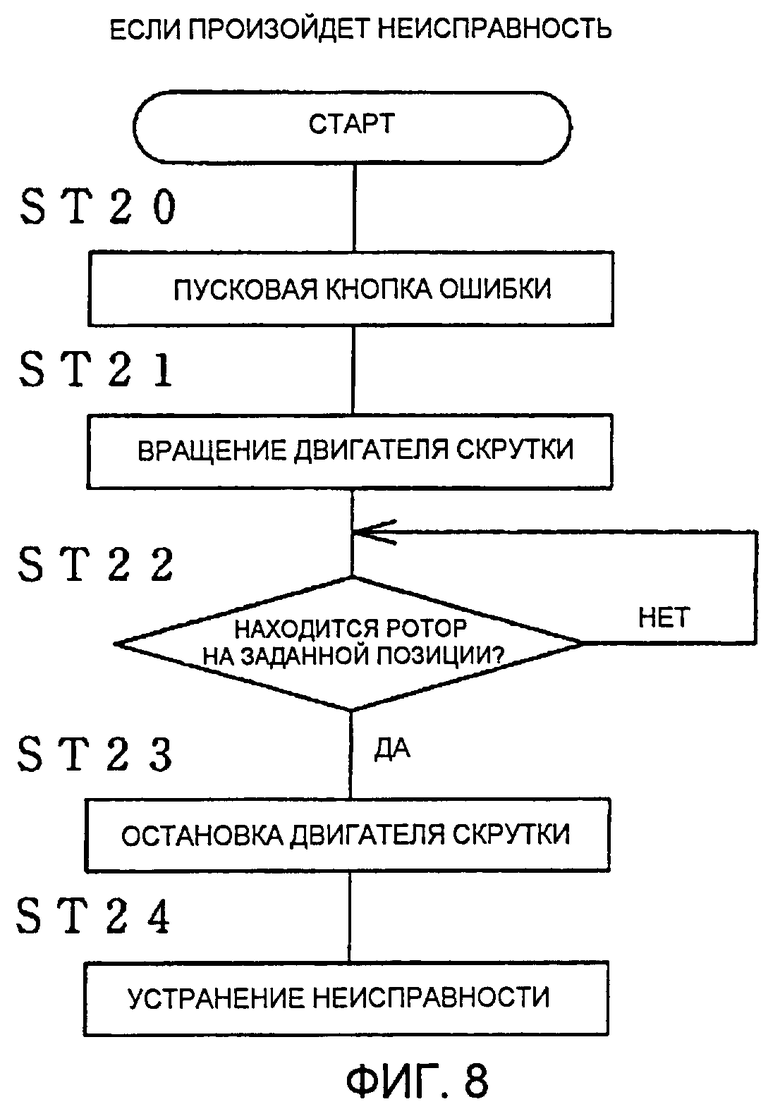
В случае, когда произошла неисправность и проволока не связала армирующие стержни, а встала под углом к крюку, питание нужно отключить, а проволоку нужно удалить, вращая крюк рукой. В этом случае неполадку также можно устранить таким же способом, как описано выше, при описании управления работой двигателя.
Поскольку положение ротора обнаруживается датчиками, положение ротора при вращении можно оценить по результатам обнаружения датчиков. Судить о положении крюка можно по положению ротора при вращении. В связи с этим, как показано на блок-схеме фиг.8, если, например, произошла ошибка, нажимают (этап ST20) на пусковую кнопку "ошибка" (не показана). Затем ротор вращается (этап ST21) и, когда комбинация датчиков Н1, Н2, Н3 даст сигнал о том, что ротор повернулся до определенного положения (выключенного положения) (этап ST22), двигатель останавливается на этапе ST23. Соответственно можно остановить крюк в позиции, где проволоку можно удалить, не вращая крюк рукой, а действия по устранению неполадок можно легко производить на этапе ST24.
Управляющий узел 20 управляет переключателями инвертора 21, тем самым управляя прямым и обратным вращениями ротора, и в то же время управляет амплитудой электрического тока, который подается на двигатель. Обычно, когда двигатель работает и вращение меняет направление, протекает большой интрузивный ток и двигатель нагревается этим интрузивным током. Управляющий узел 20 отслеживает и управляет интрузивным током для того, чтобы снизить этот нагрев.
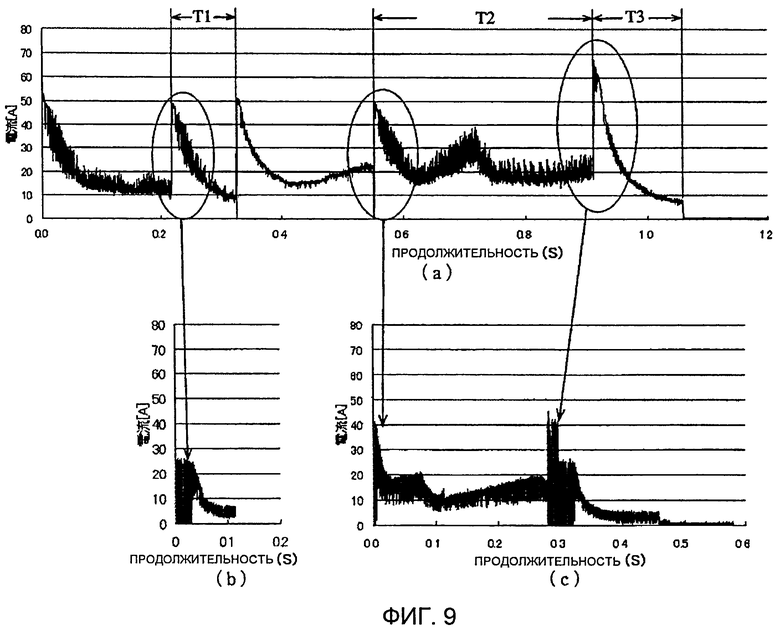
Диаграмма (а) на фиг.9 показывает электрический ток, подаваемый на двигатель 4 скрутки в традиционной машине для вязки. Т1 представляет собой период времени, в котором при вращении двигателя 4 в прямом направлении муфта 5 движется вперед, Т2 представляет собой период времени, в котором при вращении двигателя 4 в прямом направлении проволока скручивается, связывая армирующие стержни, и Т3 представляет собой период времени, в котором крюк освобождается от скрученной проволоки, и муфта 5 отводится.
В традиционных машинах для вязки, как показано на диаграмме (а) фиг.9, в начале каждого периода времени протекает большой интрузивный ток. Однако в примере осуществления изобретения в период времени Т1 не требуется большой крутящий момент потому, что вперед движется только муфта 5, нагрузка при этом небольшая. В связи с этим предельное значение электрического тока установлено в 25А, как показано на диаграмме (b) фиг.9. Кроме того, в примере осуществления изобретения, как показано на диаграмме (с) фиг.9, в период времени Т2, предельное значение тока установлено в 40А потому, что для скручивания проволоки для вязки армирующих стержней требуется большой крутящий момент. В период времени Т3 во время интрузии предельное значение тока установлено в 40А, потому что требуется большое тормозящее усилие, но предельно допустимое значение превращается в 25А потому, что после изменения направления вращения большой крутящий момент не требуется, таким образом, достигается снижение вводимой мощности.
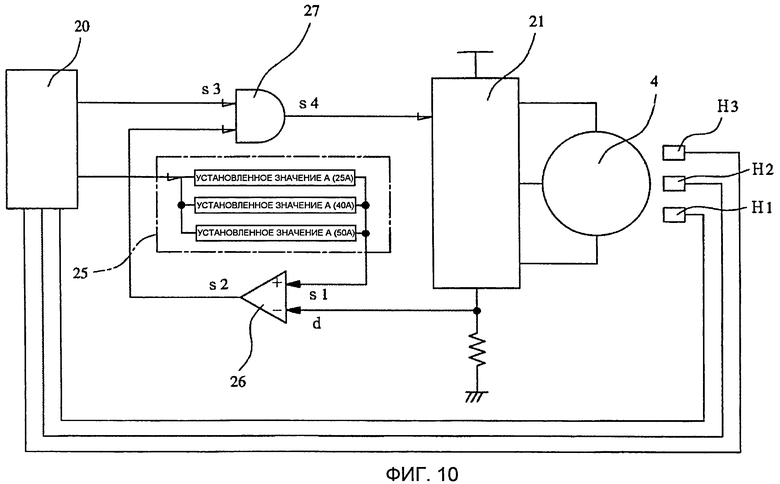
Как показано на принципиальной схеме фиг.10, предельные значения электрического тока установлены заранее в устанавливающей ток части 25. Управляющий узел 20 выбирает из устанавливающей ток части 25 установленное значение «s», в зависимости от этапа, в котором находится двигатель 4 скрутки, и сравнивает фактически измеряемое значение «d» электрического тока, протекающего к двигателю 4 с установленным значением «s» в цепи 26 сравнения. В случае, когда измеряемое значение «d» превышает установленное значение «s», сигнал s2, запрещающий ток на короткий период (около несколько сотен мкс или меньше) становится Lo и немедленно после этого возвращается к Hi. Пока измеряемое значение «d» превышает установленное значение «s», Lo и Hi повторяются. Такой запрещающий ток сигнал s2 представляет собой входной сигнал к элементу И 27. Соответственно управляющий сигнал s3, который выходит из управляющего узла 20, будет выходить как приводной сигнал s4 инвертора 21, приводящий в движение инвертор 21 только когда запрещающий ток сигнал s2 представляет собой Hi. В результате электрическим током можно управлять, эквивалентно снижая напряжение, подаваемое на двигатель через разделенную по времени подачу питания (так называемый ШИМ-преобразователь).
В примере осуществления изобретения, как показано на фиг.9, например, в период времени Т1, когда муфта 5 движется вперед, ток в цепи привода ограничен в 25А. В период времени Т2, когда проволока скручивается, ток в цепи привода ограничивается в 40А. В период времени Т3, после того как проволока скручена, ток в цепи привода ограничивается в 40А, на этапе, когда двигатель вращается в обратном направлении. После изменения направления вращения ток в цепи привода ограничивается в 25А так же как и в период времени Т1 потому, что на этом этапе только отводится муфта 5 и большой крутящий момент не требуется. Таким образом, электрический ток, подаваемый на двигатель, регулируется на соответствующих этапах.
Описанные выше предельные значения электрического тока можно установить, например, в виде значений сопротивлений силовой цепи, в которой предельные значения изменяются в результате соединения ряда резисторов (резисторы, подлежащие соединению определяет микропроцессор), таким образом, изменяется заданное напряжение аналоговым способом.
Более того, становится возможным рассчитать необходимую тормозящую силу по числу оставшихся вращений, до заданной точки и допустимым временем, используя текущее число оборотов ротора и их совокупный показатель, полученный из результатов обнаружения датчиков. На основании этого становится возможным при достижении заданной точки одновременно снижать силу торможения (скачок тока) до нижнего предела, регулированием момента начала торможения и, следовательно, можно не допустить перегрев двигателя.
Как описано выше, датчики Холла, необходимые при вращении двигателя, можно использовать не только при вращении двигателя, но и для определения состояния машины. В этом случае можно широко применять датчики положения при вращении двигателя, не устанавливая отдельно обнаруживающие датчики, определяющие состояние машины, в результате чего определение положения можно выполнять электрически, а не механически. В связи с этим можно уменьшить число датчиков. В результате датчики не нужно собирать, не нужно регулировать и, следовательно, качество сборки повышается, а количество компонентов снижается. Соответственно можно изготовить надежный электрический инструмент улучшенного качества.
Несмотря на то, что в описанном выше примере осуществления изобретение описано со ссылкой на машину для вязки арматурных стержней, изобретение можно применить к другому электрическому инструменту, включая машину для вязки или подобную ей машину, управляемую вращением двигателя, как в прямом, так и в обратном направлениях.
Несмотря на то, что изобретение полностью описано со ссылкой на специфические инструменты, для специалистов в данной области техники очевидно, что различные изменения и модификации можно добавить без отделения от духа и границ изобретения.
Это изобретение основано на японской заявке на патент, которая была подана 5 апреля 2006 года (японская заявка на патент № 2006-104591), содержание которой включено сюда посредством ссылок.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Изобретение можно применить к электрическим инструментам и, более конкретно, к электрическому инструменту, в котором рабочая часть функционирует под действием вращения двигателя в прямом и обратном направлениях.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА ДЛЯ СКРЕПЛЕНИЯ АРМАТУРЫ, БАРАБАН ДЛЯ ТАКОЙ МАШИНЫ И СПОСОБ КОНТРОЛЯ ВРАЩЕНИЯ БАРАБАНА | 2002 |
|
RU2304482C2 |
| БАРАБАН ДЛЯ НАМОТКИ ЛИНЕЙНОГО МАТЕРИАЛА | 2007 |
|
RU2364460C2 |
| МАШИНА ДЛЯ ОБВЯЗКИ АРМАТУРНЫХ ПРУТКОВ | 2009 |
|
RU2490086C2 |
| ГИДРОИМПУЛЬСНАЯ РУЧНАЯ МАШИНА | 2009 |
|
RU2472610C2 |
| МАШИНА ДЛЯ СКРЕПЛЕНИЯ АРМАТУРЫ И БАРАБАН, ИСПОЛЬЗУЕМЫЙ В ТАКОЙ МАШИНЕ | 2002 |
|
RU2291021C2 |
| Бесколлекторный регулируемый электродви-гатель постоянного тока | 1968 |
|
SU303936A1 |
| Способ запуска газотурбинного двигателя | 2018 |
|
RU2680287C1 |
| Способ запуска газотурбинного двигателя | 2019 |
|
RU2717477C1 |
| ИМПУЛЬСНО-СИЛОВАЯ РУЧНАЯ МАШИНА | 2010 |
|
RU2532790C2 |
| УСТРОЙСТВО ДЛЯ ВЯЗКИ АРМАТУРНЫХ СТЕРЖНЕЙ | 2005 |
|
RU2372261C2 |
Изобретение относится к электрическим инструментам, предназначенным для вязки арматурных стержней. Инструмент содержит электродвигатель (2) подачи для подачи проволоки (100), муфту (5), снабженную крюком (6) для захвата и скрутки проволоки (100), и двигатель (4) скрутки для перемещения муфты (5), содержит датчик (Н) для обнаружения положения ротора (15) двигателя скрутки, при этом один или оба из числа оборотов или положения при вращении двигателя скрутки измеряются обнаруживающим сигналом упомянутого датчика, положение муфты определяется по результатам измерений. Использование изобретения позволяет повысить надежность электрического инструмента. 4 з.п. ф-лы, 10 ил.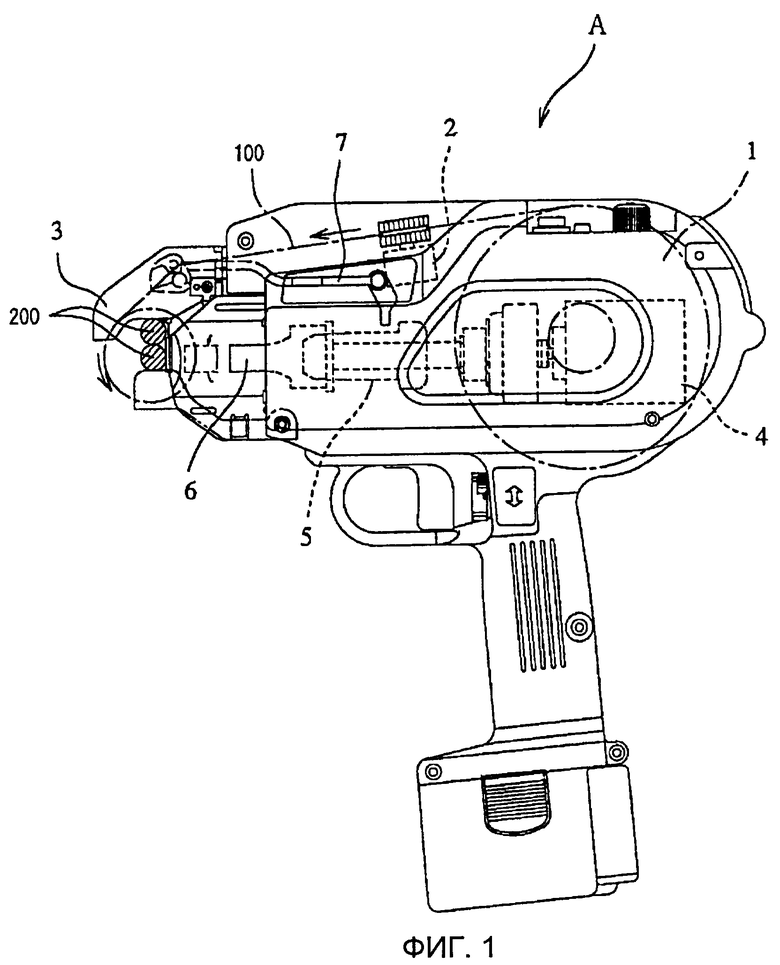
1. Машина для вязки арматурных стержней, содержащая электродвигатель (2) подачи для подачи проволоки (100), муфту (5), снабженную крюком (6) для захвата и скрутки проволоки (100), и двигатель (4) скрутки для перемещения муфты (5), отличающаяся тем, что она содержит по меньшей мере один датчик (Н) для обнаружения положения ротора (15) двигателя скрутки, при этом один или оба из числа оборотов или положений при вращении двигателя скрутки измеряются обнаруживающим сигналом упомянутого датчика, а положение муфты определяется по результатам измерений.
2. Машина по п.1, которая содержит ограничительное средство (20), ограничивающее электрический ток, приводящий в движение двигатель (4), при этом ограничительное средство управляет электрическим током так, что ограничивает электрический ток до предельных значений тока по меньшей мере двух этапов.
3. Машина по п.1, которая содержит по меньшей мере три датчика, а двигатель (4) скрутки содержит бесщеточный двигатель.
4. Машина по п.3, в которой датчики (H1, H2, Н3) расположены в положениях, смещенных от промежуточного положения между соответствующими зубцами (16) статора на 30°±θ°, при этом управляющий узел (20), управляющий вращением двигателя (4) скрутки, регулирует сигнал возбуждения, для приведения в движение двигателя (4) скрутки, на основании результатов обнаружения позиции ротора (15) датчиками (H1, H2, Н3), при этом управляющий узел (20) выбирает обнаруживающий сигнал датчиков (H1, Н2, Н3) так, что взаимосвязь между ротором (15) и обнаруживающим сигналом датчиков (Н1, Н2, Н3) является одинаковой и при прямом вращении и при обратном вращении ротора (15).
5. Машина по п.4, которая содержит ограничительное средство (20), ограничивающее электрический ток, приводящий в движение двигатель скрутки, и при этом ограничительное средство регулирует электрический ток так, что ограничивает электрический ток до предельных значений тока по меньшей мере двух этапов.
| WO 2006008968 А1, 26.01.2006 | |||
| US 5767639 А, 16.06.1998 | |||
| JP 2004023823 А, 12.06.2002 | |||
| JP 2003267307 А, 25.09.2003 | |||
| Устройство для вязки арматурных стержней | 1982 |
|
SU1054528A1 |

