Изобретение относится к области нанотехнологий и может быть использовано в автоматизированных транспортных системах передачи и позиционирования образца в вакууме и контролируемой газовой среде.
Известно устройство для укладки и ориентации цилиндрических втулок (1), содержащее средство захвата втулок: корпус и рычажный подпружиненный прижим. Имеется также механизм ориентации втулок по базирующим элементам в виде подпружиненной иглы и вращающегося валка для вращения втулки в момент поиска базы.
Функции этого устройства ограничены. Например, невозможно выполнить в случае технологической необходимости переворот изделия на 180°.
Известно также устройство переноса и ориентации заготовок (2). Оно имеет головку с установленными на ней захватами заготовок, а также механизм переноса и ориентации заготовок, выполняющий функцию переворота на 180° при перемещении заготовки от одной фиксированной позиции обработки к другой. При этом переворот заготовок является взаимосвязанной функцией их ориентации на позиции обработки. Это устройство взято за прототип. Оно имеет существенный недостаток, а именно невозможность выполнить независимо ориентацию и переворот изделия в соответствии с условиями технологического процесса обработки, что сужает его функциональные возможности.
Технический результат изобретения заключается в расширении функциональных возможностей устройства.
Технический результат достигается тем, что в устройстве ориентации образца для нанотехнологического комплекса, содержащем средство захвата образца и механизм перемещения этого средства при ориентации образца, последний снабжен носителем образца с элементами ориентации, а средство захвата содержит платформу, установленную с возможностью поворота вокруг горизонтальной оси, а также две пары роликов попарно расположенных на противоположных краях платформы. При этом ролики выполнены с элементами взаимодействия с носителем образца. Средство захвата также имеет привод перемещения роликов вдоль горизонтальной оси, при этом механизм перемещения средства захвата содержит U-образную раму, соединенную с приводом перемещения вдоль вертикальной оси, который установлен на основании устройства. U-образная рама своими проушинами охватывает платформу средства захвата образца и на них порознь установлены: привод поворота средства захвата вокруг горизонтальной оси и привод вращения одного из роликов.
Носитель образца выполнен в виде кольца, профилированного по внешней окружности, которое сопрягается с элементами взаимодействия роликов в виде ответного профиля, при этом образец установлен на первой плоской стороне носителя, а элементы ориентации образца на второй плоской стороне носителя.
Привод перемещения роликов содержит ходовой винт с правой и левой резьбовыми нарезками, сопряженный с правой и левой ходовыми гайками, связанными посредством тяг с соответствующей парой роликов, каждый из которых установлен на направляющей, расположенной на платформе вдоль горизонтальной оси, при этом одна из пар роликов имеет подпружиненные тяги.
Платформа снабжена двумя полуосями, установленными в проушинах U-образной рамы, при этом привод поворота средства захвата вокруг горизонтальной оси сопряжен с одной из полуосей с помощью угловой передачи вращения, а привод вращения одного из роликов выполнен в виде бесконтактной передачи вращения, причем ведущая ее часть установлена на валу привода, а ведомая часть закреплена на оси ролика.
Платформа также содержит датчик ориентации образца, сопряженный с ориентирующими канавками на второй плоской стороне носителя, а также датчик крайних угловых положений платформы при ее повороте вокруг горизонтальной оси.
При этом датчик ориентации образца выполнен в виде цилиндрического ролика с осью вращения, совпадающей с координатной осью ориентации образца, а сам ролик установлен на первой гибкой контактной пластине датчика ориентации, в свою очередь вторая жесткая контактная пластина датчика ориентации установлена на платформе.
Датчик крайних угловых положений платформы выполнен в виде контактной группы, включающей двухпозиционный поворотный контакт, закрепленный на полуоси платформы, и оба сопряженных неподвижных контакта, установленных на проушине U-образной рамы.
При этом тяги подпружиненной пары роликов выполнены составными в виде телескопического соединения двух частей, а обе части одной тяги сопряжены посредством пружины сжатия.
На чертежах показана предложенная конструкция устройства ориентации образца для нанотехнологического комплекса.
На Фиг.1 дан фронтальный вид устройства с образцом, находящимся на носителе образца.
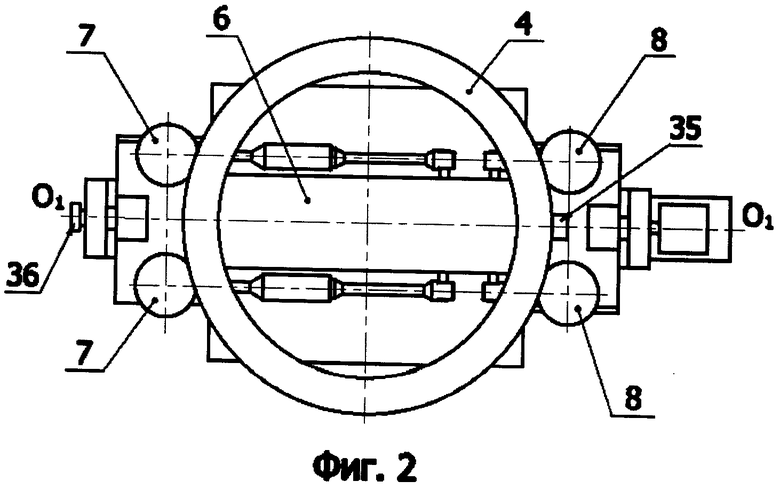
На последующих фигурах образец условно не показан. На Фиг.2 дан вид сверху предложенного устройства.
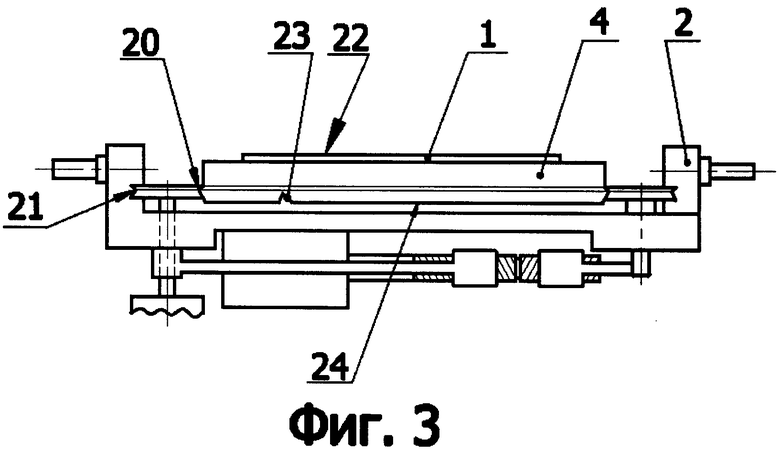
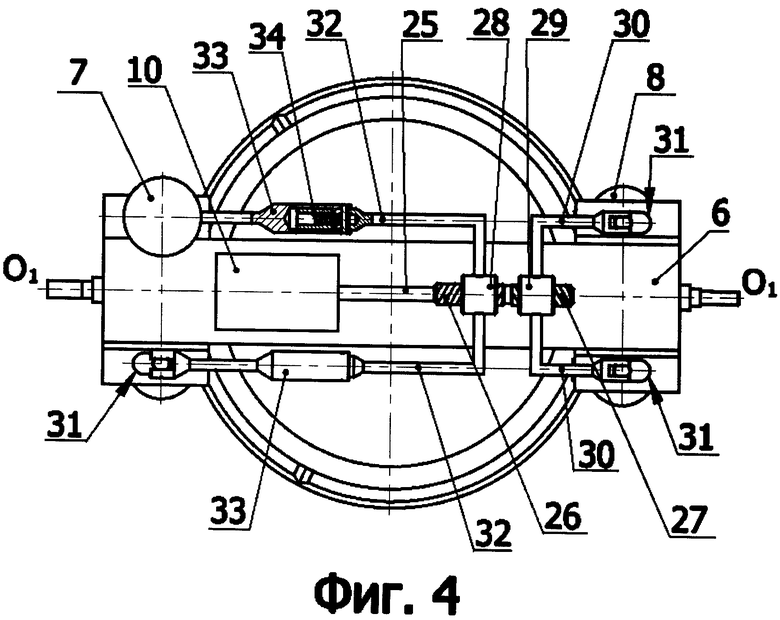
На Фиг.3 (фронтальный вид) и Фиг.4 (вид снизу) представлено в виде отдельного узла средство захвата образца.
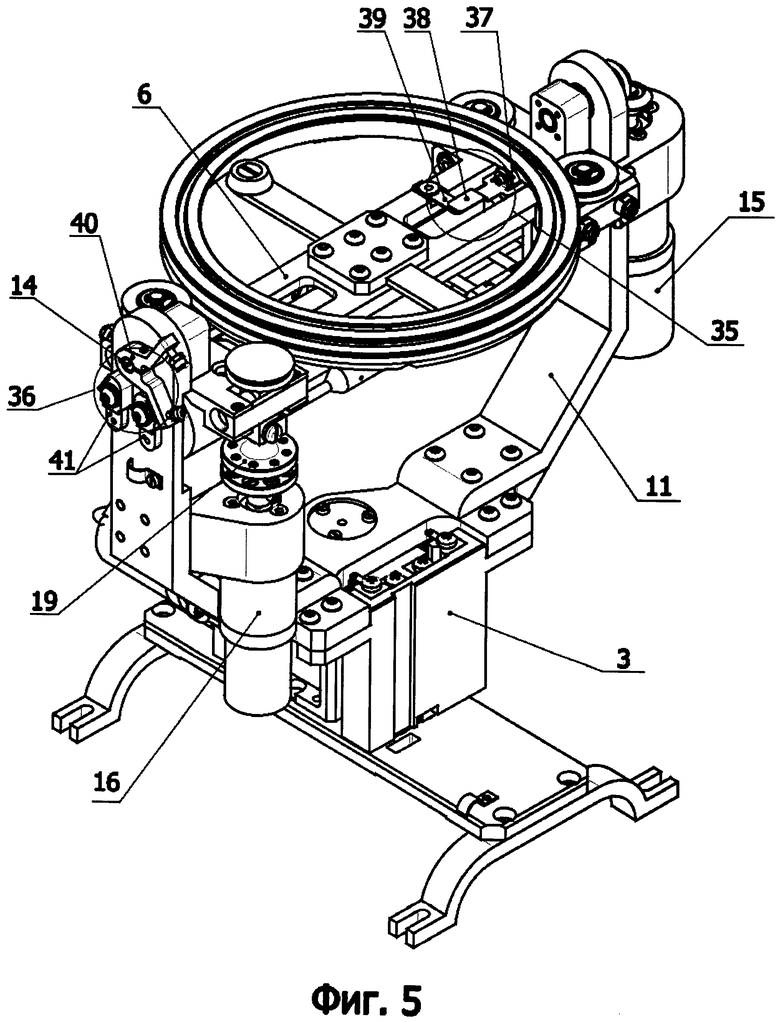
На Фиг.5 представлена аксонометрическая проекция варианта исполнения устройства ориентации образца.
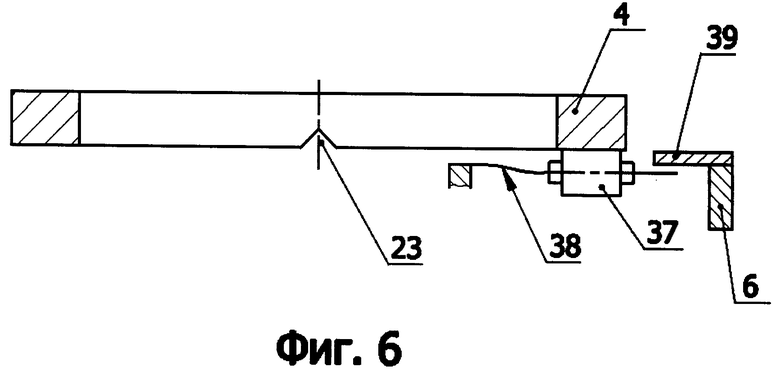
На Фиг.6 дана схема установки датчика ориентации образца и его взаимодействия с носителем образца.
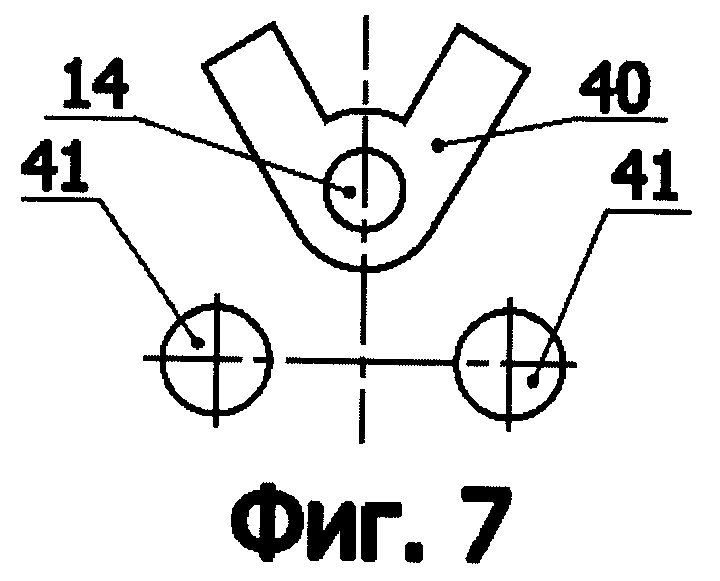
На Фиг.7 дана схема установки датчика крайних угловых положений платформы.
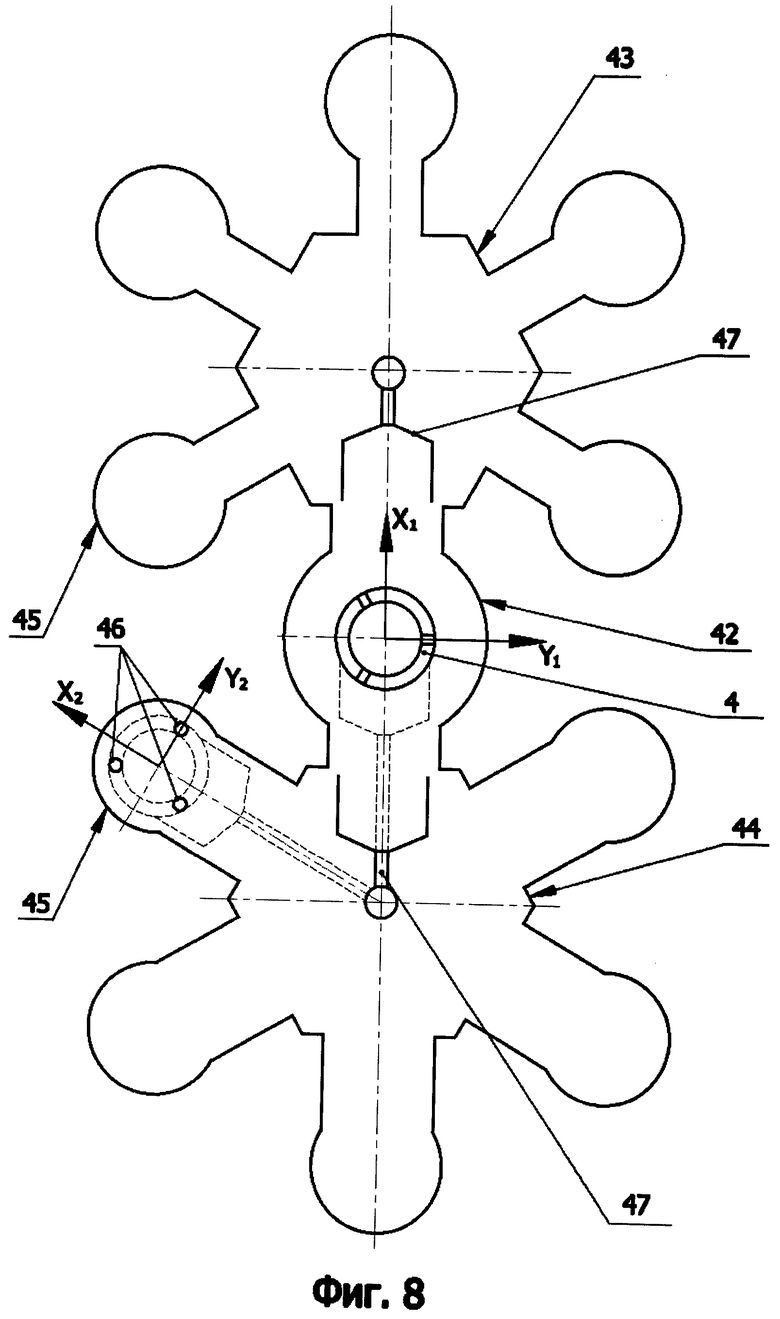
На Фиг.8 (вид в плане) представлена схема нанотехнологического комплекса, условно состоящего из двух связанных вместе кластеров технологических камер, соединенных транспортной системой с размещенным в ней устройством ориентации образца.
Образец 1 (Фиг.1) расположен в устройстве на средстве захвата 2, которое сопряжено с механизмом 3 перемещения средства захвата 2, при этом образец 1 снабжен носителем 4, имеющим элементы ориентации 5 (подробнее см. описание Фиг.3). Средство захвата 2 в свою очередь содержит платформу 6 с расположенными на противоположных краях платформы двумя парами роликов 7 и 8 (см. также Фиг.2), которые имеют элементы взаимодействия 9 с носителем 4 образца (подробнее см. описание Фиг.3), а также привод перемещения 10 роликов вдоль горизонтальной оси O1-O1.
Механизм 3 перемещения средства захвата 2 содержит U-образную раму 11, соединенную с приводом перемещения 12 по вертикальной оси O2-O2, который устанавливается на основании 13.
В проушины U-образной рамы 11 вставлены две полуоси 14, расположенные с противоположных краев платформы 6. На проушинах U-образной рамы 11 порознь установлены привод поворота 15 средства захвата 2 вокруг горизонтальной оси O1-O1 и привод вращения 16 одного из роликов 7. Все примененные в устройстве приводы могут быть выполнены с использованием шаговых электродвигателей, например, ф. Faulhaber, модель AM2224-AV-12-75.
Привод поворота 15 соединен с одной из полуосей 14 с помощью угловой передачи вращения 17, например конической зубчатой передачи, а привод вращения 16 сопряжен с одним из роликов 7, например, с помощью магнитной муфты, ведущая часть 18 которой установлена на валу привода вращения 16, а ведомая часть 19 - на оси ролика 7.
Носитель 4 образца может быть выполнен в виде кольца с треугольным выступом 20 (см. Фиг.3) по внешней окружности, который сопряжен с треугольной канавкой 21 на наружном контуре каждого из роликов. При этом образец 1 установлен на первой плоской стороне 22 носителя 4, а элементы ориентации выполнены в виде ориентирующих канавок 23 на второй плоской стороне 24 носителя 4.
Привод перемещения 10 (см. Фиг.4) роликов содержит ходовой винт 25 с двумя резьбовыми нарезками противоположного направления, например правого 26 и левого 27 направления, с которыми сопряжены две правая 28 и левая 29 ходовые гайки. При этом одна из ходовых гаек, например ходовая гайка 29, соединена посредством жестких тяг 30 с парой роликов 8, при том, что каждый из роликов установлен своей осью на направляющей 31, расположенной на платформе 6 вдоль горизонтальной оси O1-O1, a пара роликов 7 подпружинена на своих тягах, которые выполнены составными в виде телескопического соединения двух частей 32 и 33 и обе части сопряжены посредством пружины сжатия 34.
Платформа 6 содержит датчик ориентации образца 35 и датчик крайних угловых положений 36 платформы 6 (см. Фиг.2, 5, 6). Датчик ориентации образца 35 (см. подробнее Фиг.6) выполнен в виде цилиндрического ролика 37 с осью вращения, совпадающей с координатной осью ориентации образца Y1 (см. также Фиг.8), а сам ролик 37 установлен на первой гибкой контактной пластине 38, при этом вторая жесткая контактная пластина 39 этого датчика установлена на платформе 6. Датчик крайних угловых положений 36 (см Фиг.2, 5, 7) выполнен в виде контактной группы, состоящей из двухпозиционного поворотного контакта 40, закрепленного на полуоси 14 и двух неподвижных контактов 41, установленных на проушине U-образной рамы 11.
Схема установки устройства ориентации в транспортной системе передачи образца нанотехнологического комплекса, условно состоящего из двух связанных вместе кластеров технологических камер, показана на Фиг.8.
Устройство ориентации расположено в вакуумной камере 42, соединенной с камерами 43 и 44, содержащими роботов-раздатчиков 47, каждая из которых сопряжена с технологическими камерами 45 кластеров. При этом устройство ориентации расположено по взаимно перпендикулярным координатным осям ориентации образца X1-Y1, где ось X1 коллинеарна с линией передачи образца из камеры 43 робота-раздатчика в вакуумную камеру 42, а ось Y1 совпадает с осью O1-O1 расположения датчика ориентации 35 образца (см. Фиг.2). Технологические камеры 45 содержат элементы ориентации образца 46, например сферические опоры, ориентированные по взаимно перпендикулярным координатным осям X2-Y2, где ось X2 коллинеарна линии передачи образца из технологической камеры 45 в камеру 44 робота-раздатчика.
Предлагаемое устройство работает следующим образом.
Робот-раздатчик 47 (см. Фиг.8) вспомогательной камеры 43, обслуживающий, например, технологические камеры 45 кластера групповых технологий, среди них камеры импульсного лазерного осаждения, магнетронного распыления, молекулярно-лучевой эпитаксии и т.д., своим манипулятором переносит образец, установленный на носителе 4 в данном случае рабочей поверхностью вниз, из технологической камеры в зону средства захвата 2 устройства (см. Фиг.1).
Для согласования положения по вертикальной оси O2-O2 носителя 4 и средства захвата 2 включают привод перемещения 12.
Затем включают привод перемещения 10, вращающий ходовой винт 25 (см. Фиг.4), и с помощью ходовых гаек 28, 29, жестких тяг 30, подпружиненных телескопических тяг 32, 33 перемещают вдоль горизонтальной оси по направляющим 31 две пары роликов 7 и 8. Ролики своими треугольными канавками 21 (см. Фиг.3) входят в сопряжение с треугольным выступом 20 кольца носителя 4 и фиксируют его в средстве захвата 2.
После этого манипулятор робота-раздатчика выходит из сопряжения с кольцом носителя 4, тем самым оставляя образец в устройстве.
Затем следует переворот образца на 180° вокруг горизонтальной оси рабочей поверхностью вверх для последующей передачи в кластер локальных технологий. Для этого включается привод поворота 15 (см. Фиг.1), который с помощью угловой передачи вращения 17 поворачивает платформу 6 средства захвата 2 на полуосях 14. Угол поворота фиксируется датчиком крайних угловых положений 36 платформы 6 (см. Фиг.2).
После этого проводится ориентация образца относительно координатных осей X1-Y1 камеры 42 устройства ориентации (см. Фиг.8). Включается привод вращения 16, который через полумуфты 18 и 19 передает вращение одному из роликов 7 (см. Фиг.1).
Носитель 4 образца поворачивается пока ориентирующая канавка 23 на второй плоской стороне 24 носителя не зафиксируется датчиком ориентации образца 35 (см. Фиг.2, 3).
Далее для согласования положения по вертикальной оси О2-О2 носителя 4 и манипулятора робота-раздатчика 47, обслуживающего технологические камеры кластера локальных технологий, включается привод перемещения 12 (см. Фиг.1). После того, как манипулятор робота-раздатчика 47 выйдет из сопряжения с кольцом носителя 4, включается на реверс привод перемещения 10 и две пары роликов 7 и 8 выходят из контакта с кольцом носителя 4.
Далее робот-раздатчик 47 (см. Фиг.8) вспомогательной камеры 44 транспортирует образец в технологическую камеру 45 кластера локальных технологий с ориентацией по координатным осям X2-Y2 базирующих элементов 46 камеры, что позволяет проводить локальную координатную обработку образца, например, фокусированным ионным пучком, сканирующим зондом с системой газовой инжекции и т.д.
Таким образом, в предложенном устройстве выполняются независимые функции ориентации образца и переворота образца рабочей поверхностью вверх или вниз в зависимости от технологии обработки в том или ином кластере технологических камер.
Кроме того, в случае, когда нет технологической необходимости переворота образца и обработка должна быть продолжена в соседней камере кластера, устройство может выполнять только функцию механизма межоперационной передачи носителя образца из одной камеры кластера в другую без переворота и ориентирования, что расширяет технические и функциональные возможности устройства.
Источники информации
1. Патент РФ N2257993, МПК B23Q, 7/08 от 22.12.2003.
2. Механизмы. Справочник под редакцией Кожевникова. "Машиностроение", 1976 г., рис.13.14.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАНОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2522776C2 |
| СПОСОБ ПЕРЕДАЧИ ПРОЦЕССА ВРАЩЕНИЯ ОТ ПРИВОДА БУНКЕРУ СМЕСИТЕЛЯ-РАЗДАТЧИКА КОРМОВ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2014 |
|
RU2569016C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА КОНТАКТНОЙ СЕТИ ЭЛЕКТРИФИЦИРОВАННЫХ ЖЕЛЕЗНЫХ ДОРОГ | 2001 |
|
RU2223184C2 |
| Способ и устройство переворота подложек в процессе производства фотопреобразователей | 2016 |
|
RU2620452C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| СТОЛ ПЕРЕГРУЗОЧНЫЙ | 2018 |
|
RU2695863C1 |
| ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ | 2012 |
|
RU2486128C1 |
| УСТАНОВКА ДЛЯ ГРАДУИРОВКИ И КАЛИБРОВКИ ИНКЛИНОМЕТРОВ | 2008 |
|
RU2364718C1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОЙ СЦЕПКИ ДЛЯ ЭВАКУАЦИИ НАЗЕМНЫХ РОБОТОТЕХНИЧЕСКИХ КОМПЛЕКСОВ ВОЕННОГО НАЗНАЧЕНИЯ | 2024 |
|
RU2825935C1 |
Изобретение относится к области нанотехнологии и может быть использовано в автоматизированных транспортных системах передачи и позиционирования образца в вакууме и контролируемой газовой среде. Устройство содержит средство захвата образца и механизм его перемещения, носитель образца в виде кольца, профилированного по внешней окружности. Средство захвата содержит платформу, две пары роликов, попарно расположенных на противоположных краях платформы и выполненных с элементами взаимодействия с носителем образца, и привод перемещения роликов вдоль горизонтальной оси. Механизм перемещения средства захвата содержит U-образную раму, соединенную с приводом перемещения вдоль вертикальной оси, установленным на основании устройства. U-образная рама своими проушинами охватывает платформу средства захвата образца и на них порознь установлены привод поворота средства захвата вокруг горизонтальной оси и привод вращения одного из роликов. Устройство позволяет выполнять независимые функции ориентации и переворота образца рабочей поверхностью вверх или вниз, функцию механизма межоперационной передачи образца из одной камеры кластера в другую без переворота и ориентации образца. 7 з.п. ф-лы, 8 ил.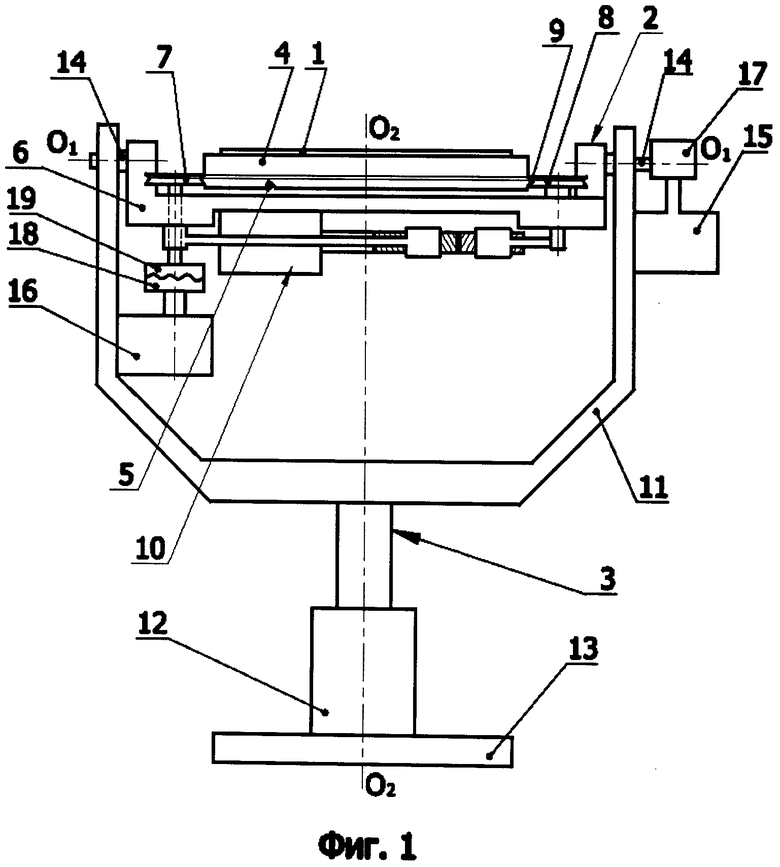
1. Устройство для ориентации образца нанотехнологического комплекса, содержащее средство захвата (2) образца (1) и механизм (3) перемещения средства захвата (2) при ориентации образца, отличающееся тем, что оно снабжено носителем (4) образца с элементами ориентации (5), средство захвата (2) содержит платформу (6), установленную с возможностью поворота вокруг горизонтальной оси и содержащую две пары роликов (7) и (8), попарно расположенных на противоположных краях платформы (6), выполненных с элементами взаимодействия (9) с носителем (4) образца, и привод перемещения (10) роликов вдоль горизонтальной оси, при этом механизм (3) перемещения средства захвата (2) содержит U-образную раму (11), соединенную с приводом перемещения по вертикальной оси (12), установленным на основании (13), а U-образная рама (11) своими проушинами охватывает платформу (6) средства захвата (2), притом на проушинах U-образной рамы (11) порознь установлены привод поворота (15) средства захвата (2) вокруг горизонтальной оси и привод вращения (16) одного из роликов.
2. Устройство по п.1, отличающееся тем, что носитель (4) образца выполнен в виде кольца с профилем (20) по внешней окружности, сопрягаемым с элементами взаимодействия (9) роликов в виде ответного профиля (21), а элементы ориентации (5) образца, устанавливаемого на первой плоской стороне (22) носителя (4), выполнены в виде ориентирующих канавок (23) на второй плоской стороне (24) носителя (4).
3. Устройство по п.1, отличающееся тем, что привод перемещения (10) роликов содержит ходовой винт (25) с двумя резьбовыми нарезками противоположного направления, например правого и левого, а правая (28) и левая (29) ходовые гайки связаны посредством тяг (30) и (32) с соответствующей парой роликов (7) и (8), каждый из которых установлен на направляющей (31), расположенной на платформе (6) вдоль горизонтальной оси, при этом одна из пар роликов подпружинена на своих тягах.
4. Устройство по п.1, отличающееся тем, что платформа (6) снабжена двумя полуосями (14), установленными в проушинах U-образной рамы (11), привод поворота (15) средства захвата (2) вокруг горизонтальной оси сопряжен с одной из полуосей (14) с помощью угловой передачи вращения (17), привод вращения (16) одного из роликов выполнен в виде бесконтактной передачи вращения, причем ведущая ее часть (18) установлена на валу привода вращения (16), а ведомая часть (19) закреплена на оси одного из роликов.
5. Устройство по п.1, отличающееся тем, что платформа (6) содержит датчик ориентации образца (35), сопряженный с ориентирующими канавками (23) на второй плоской стороне (24) носителя (4), и датчик крайних угловых положений (36) платформы (6) при ее повороте вокруг горизонтальной оси.
6. Устройство по п.5, отличающееся тем, что датчик ориентации образца (35) выполнен в виде цилиндрического ролика (37), ось вращения которого совпадает с координатной осью ориентации образца, при этом цилиндрический ролик (37) установлен на первой гибкой контактной пластине (38) датчика, а вторая жесткая контактная пластина (39) датчика установлена на платформе (6).
7. Устройство по п.5, отличающееся тем, что датчик крайних угловых положений (36) платформы (6) выполнен в виде контактной группы, включающей двухпозиционный поворотный контакт (40), закрепленный на полуоси (14) платформы (6), и два сопряженных неподвижных контакта (41), установленных на проушине U-образной рамы (11).
8. Устройство по п.3, отличающееся тем, что тяги подпружиненной пары роликов выполнены составными в виде телескопического соединения двух частей (32) и (33), при этом обе части (32) и (33) одной тяги сопряжены посредством пружины сжатия (34).
| НАНОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС | 2006 |
|
RU2308782C1 |
| СВЕРХВЫСОКОВАКУУМНАЯ ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ СКАНИРУЮЩИХ ЗОНДОВЫХ МИКРОСКОПОВ | 1999 |
|
RU2158454C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| WO 9838501 A1, 03.09.1998 | |||
| УСТРОЙСТВО ДЛЯ УКЛАДКИ И ОРИЕНТАЦИИ ЦИЛИНДРИЧЕСКИХ ВТУЛОК | 2003 |
|
RU2257993C1 |

