Изобретение относится к области робототехники и может быть использовано для дистанционной эвакуации легких наземных робототехнических комплексов военного назначения (НРТК ВН) из опасных зон (обстрелов, заражений, пожаров), без угрозы жизни и здоровью оператора.
Из уровня техники известен «Способ сцепки тягача с машиной и устройство для его осуществления» (Патент № 2152319 от 10.07.2000 г.), который включает сошник, управляемый изнутри тягача приводом.
Известно «Устройство для безопасной эвакуации поврежденных образцов вооружения и военной техники» (Заявка на полезную модель
№ 2023124818 от 27.09.2023 г.), состоящее из: крепления рамы-основания; сошника-бульдозера БРЭМ (бронированная ремонтно-эвакуационная машина); рамы-основания; телескопической тяги с креплением; быстросъёмников с приваренными к ним втулками по две на каждом; П-образных проушин, зафиксированных болтами к втулкам; в нижней части П-образных проушин приварены гайки выполняющие функцию направляющих для прижимных болтов с упорами на своих концах; тросов с коушами.
Известно «Устройство для дистанционной сцепки при эвакуации гусеничных машин» (Патент на полезную модель № 210967 от 16.05.2022 г.) являющееся наиболее близким к заявляемому техническому решению (прототип), содержащее: крепления рамы-основания; сошник БРЭМ; раму-основание; кронштейны для крепления быстросъемных коушей; гидравлический поршень; крепление гидравлического поршня; фиксаторы; быстросъемные коуши.
Общим недостатком известных технических решений является их низкая эффективность, обусловленная отсутствием универсальности, что не позволяет обеспечивать эвакуацию поврежденных НРТК ВН методами полуподъема или на жесткой сцепке.
Известно, что значительный процент поврежденной техники, особенно при ведении боевых действий, оказывается с заблокированным гусеничным (колесным) движителем. Такие образцы обычно эвакуируется методом частичной погрузки или полуподъема. При отсутствии водителя в эвакуируемом образце применяется метод буксировки на жесткой сцепке.
Таким образом, технический результат заключается в повышении эффективности устройства за счет обеспечения его универсальности, что позволит эвакуировать поврежденные образцы НРТК ВН различными способами, в зависимости от их технического состояния.
Указанный технический результат достигается тем, что раму-основание изготавливают U-образной формы с шарнирными креплениями для установки на корпус НРТК ВН, в средней и передней части которой на кронштейнах смонтированы ролики вокруг которых заводится трос, с коническим коушем на конце, намотанный на катушку, вращение которой обеспечивается электродвигателем, а фиксация храповым механизмом с электроприводом, который также, как и электродвигатель болтовым соединением крепится на корпусе НРТК ВН. На корпусе НРТК ВН также установлены и жестко сварным соединением закреплены верхние и нижние ограничители. В передней части рамы-основания приварен металлический буфер с внутренней конической полостью и прорезью для троса.
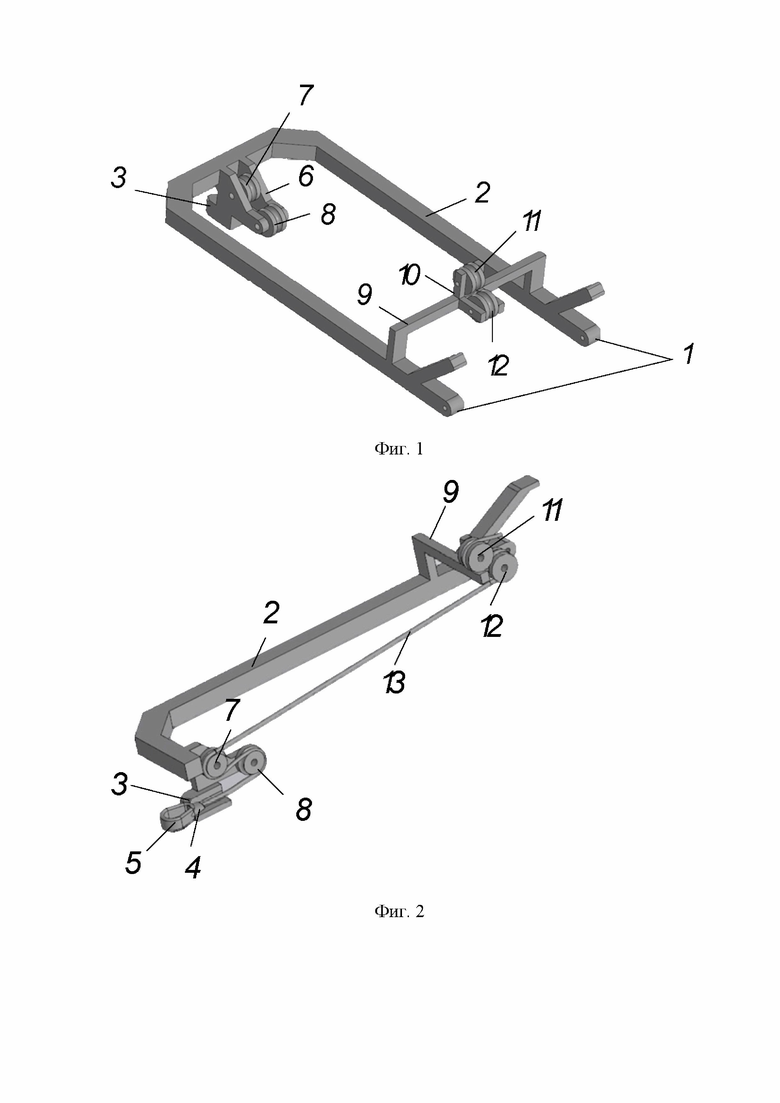
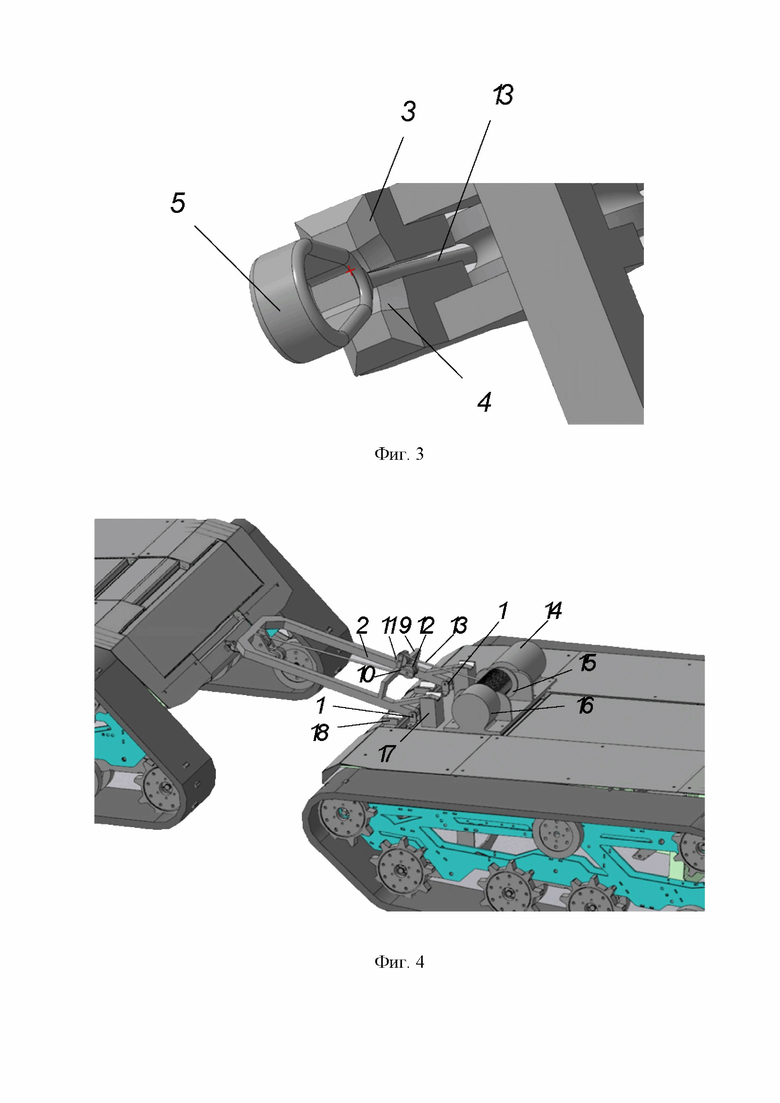
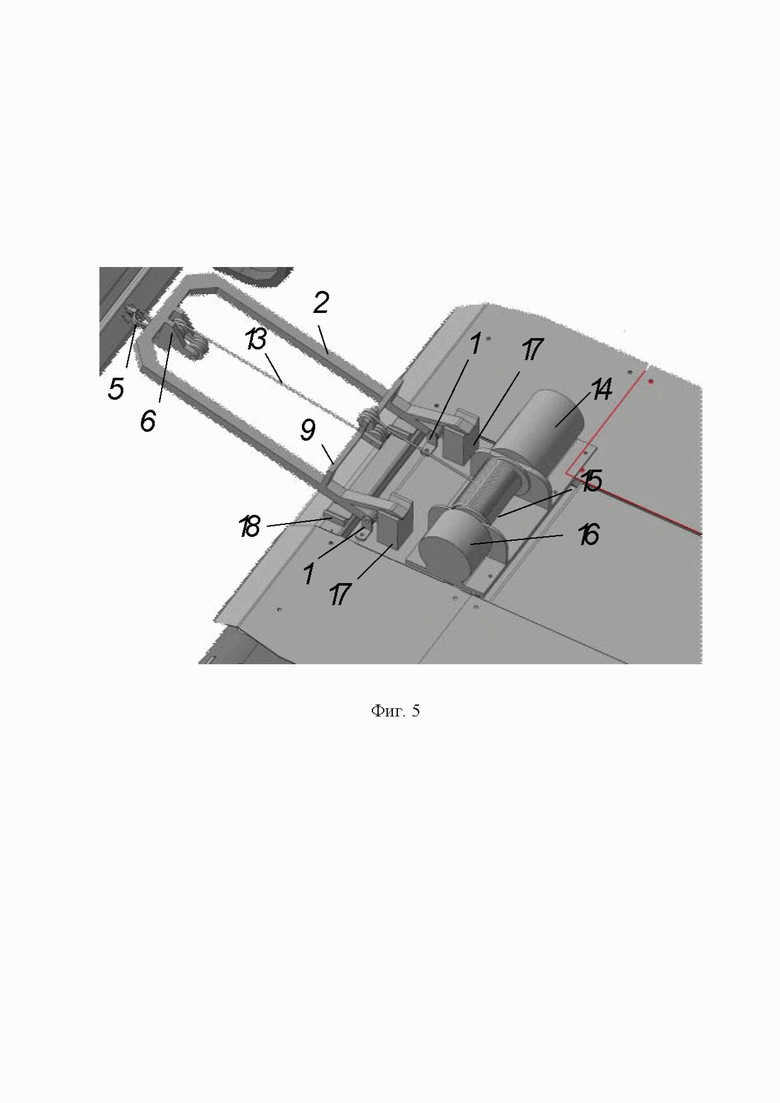
Техническое решение поясняется рисунками, где на фиг. 1 и 2 изображено устройство для дистанционной сцепки при эвакуации наземных РТК ВН, состоящее из: 1 – шарнирных креплений рамы-основания 2 к корпусу НРТК ВН; 2 – рамы-основания U-образной формы, в передней части которой приварен металлический буфер 3 с прорезью и конической полостью 4 для фиксации конического коуша 5 (выполненный конической формы) (см. фиг. 3) и кронштейн 6 для крепления роликов 7 и 8; между двух параллельно установленных штанг (см. фиг. 1), в средней части рамы-основания 2 приварена перекладина 9 c кронштейном 10 для крепления роликов 11 и 12 (см. фиг. 1, 2); сматывание (разматывание) троса 13 обеспечивается электродвигателем 14, болтовым соединением, закрепленным на корпусе НРТК ВН; на валу электродвигателя 14 жестко (зафиксирована шпонкой) установлена катушка 15, с другой стороны катушка 15 крепится на валу храпового механизма 16 с электроприводом и также фиксируется шпонкой (см. фиг. 4, 5). Храповой механизм 16 с электроприводом болтовым соединением закреплен на корпусе НРТК ВН. Электропривод храпового механизма 16 предназначен для его дистанционного разблокирования и обеспечения свободного вращательного движения катушки 15 в сторону разматывания троса 13. С целью ограничения траектории вертикального перемещения рамы-основания 2, на корпусе НРТК ВН установлены и жестко сварным соединением закреплены верхние 17 и нижние 18 ограничители (см. фиг. 4, 5).
Устройство является съемным, легко монтируемым, что обеспечивает удобство использования оператором НРТК ВН при необходимости эвакуации поврежденных образцов.
Принцип работы устройства заключается в следующем. Эвакуация поврежденных образцов НРТК ВН может производится тремя способами:
а) Первый способ - буксировкой на жесткой сцепке;
б) Второй способ - буксировкой полуподъемом;
в) Третий способ - буксировкой на гибкой сцепке.
Перед выполнением боевой задачи по эвакуации поврежденных образцов НРТК ВН из-под огня противника оператор робота крепит раму-основание 2, шарнирными креплениями 1 к корпусу НРТК ВН (см. фиг. 4, 5). Далее трос 13 пропускается через ролики 11, 12 и 7, 8 как показано на фиг. 2, заводится в прорезь, выполненную в металлическом буфере 3 и натягивается за счет намотки на катушку 15 при работе электродвигателя 14. Под действием силы натяжения троса 13 конический коуш 5 закрепленный на тросе входит коническая полость 4 в металлическом буфере 3 рамы-основания 2 и жестко фиксируется в положении, обусловленном формой полости (см. фиг. 2, 3). Такая жесткая фиксация позволит избежать колебаний коуша 5 с собственной амплитудой, обусловленной продольными и поперечными колебаниями корпуса НРТК ВН и облегчить процесс зацепления его за крюк эвакуируемого образца. Натяжение троса 13 и, следовательно, положение конического коуша 5 сохраняется и после отключения электродвигателя 14 за счет блокирования вращения катушки 15, в сторону разматывания троса, храповым механизмом 16. Уровень натяжения троса 13 регулируется автоматически, в зависимости от задачи поставленной оператором.
После производства технической разведки НРТК ВН с установленной на его корпусе рамой-основанием 2, выдвигается к месту эвакуации поврежденных образцов. При произведении сцепки НРТК ВН с поврежденным образцом оператор, находясь на удалении от опасного рубежа, наблюдая в монитор, осуществляет горизонтальное маневрирование роботом и вертикальное перемещение рамы-основания 2. Вертикальное перемещение рамы-основания 2 обеспечивается за счет наматывания (сматывания) троса 13 на катушку 15 при вращении вала электродвигателя 14 в различных направлениях. Так, после наматывания излишков троса 13 на катушку 15 конический коуш 5 входит плотно в коническую полость 4 в металлическом буфере 3. При дальнейшем наматывании троса 13, после фиксации конического коуша 5 в конической полости 4, его поступательное движение преобразуется в круговое, осью вращения в этом случае являются шарнирные крепления 1 к корпусу НРТК ВН (см. фиг. 4 и 5). Максимальный подъем рамы-основания 2 ограничивается упором в верхние ограничители 17. Опускание рамы-основания 2 производится в обратной последовательности до ее касания нижних ограничителей 18.
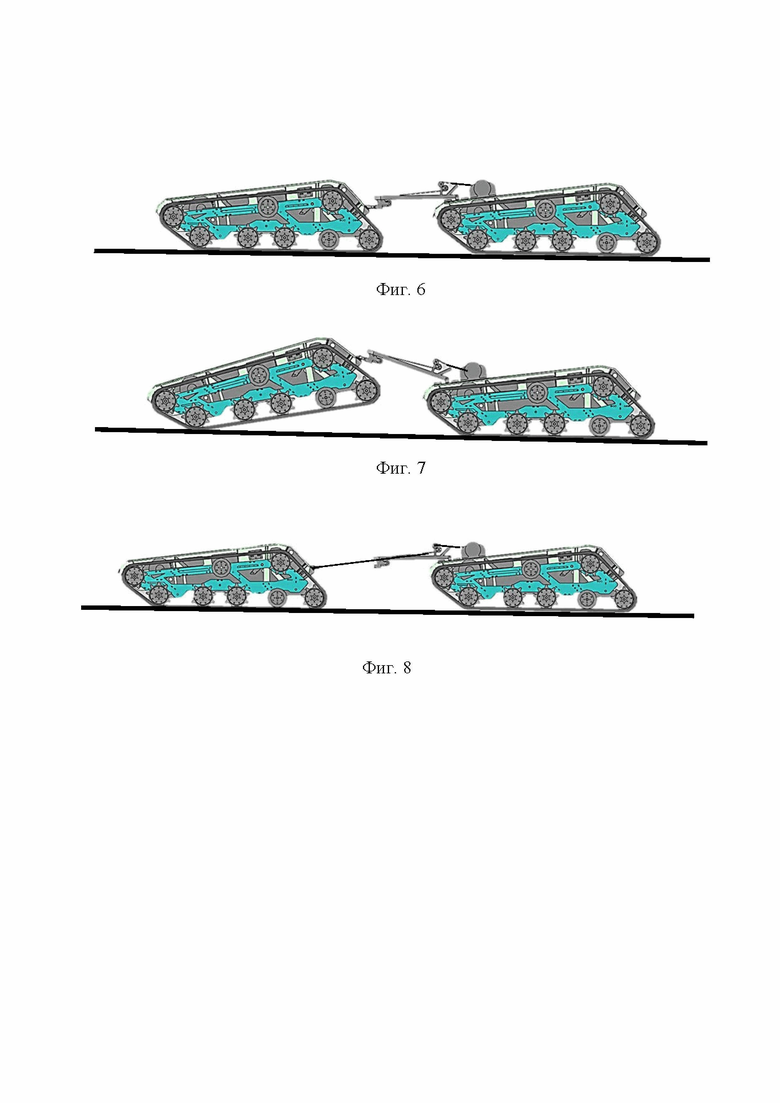
После зацепления коуша 5 за буксировочный крюк эвакуируемого образца оператор, исходя из его технического состояния, выбирает способ эвакуации. Для реализации первого способа рама-основание 2 располагается параллельно земле, и свободно опирается на нижние ограничители 18 (см. фиг. 6). За счет натяжения троса 13 конический коуш 5 зафиксируется в конической полости 4 металлического буфера 3 и в таком положении блокируется путем стопорения катушки 15 храповым механизмом 16 размещенной на его валу. При этом способе эвакуация поврежденного транспортного средства производится на жесткой сцепке, обеспечивающей стабильную дистанцию между НРТК ВН и эвакуируемым образцом.
Реализация второго способа обеспечивается следующим образом. После зацепления коуша 5 за буксировочный крюк эвакуируемого образца оператор, с помощью дистанционного управления дает команду на включение электродвигателя 14 для наматывания троса 13 на катушку 15. Вследствие фиксации конического коуша 5 в конической полости 4 металлического буфера 3 его поступательное движение преобразуется в круговое, осью вращения в этом случае являются шарнирные крепления 1 к корпусу НРТК ВН (см. фиг. 4 и 7). Подъем рамы-основания 2 производится до упора в верхние ограничители 17. После этого катушка 15 блокируется от разматывания храповым механизмом 16 с электроприводом. Вследствие кругового движения конического коуша 5, зацепленная за буксировочный крюк часть корпуса буксируемого образца приподнимается над землей (см. фиг. 7). Эвакуация поврежденного транспортного средства производится полуподъемом, что позволит эвакуировать поврежденную технику с заблокированным гусеничным (колесным) движителем.
При отсутствии возможности эвакуации НРТК ВН первым или вторым способом производится эвакуация на гибкой сцепке. Для этого, после зацепления эвакуируемого образца, трос 13 с коническим коушем 5 отпускается на требуемую длину, затем катушка 15 блокируется от разматывания храповым механизмом 10 с электроприводом. При этом способе рама-основание 2, так же, как и при первом, располагается параллельно земле, и свободно опирается на нижние ограничители 18 (см. фиг. 8). Убедившись, что эвакуации НРТК ВН ничто не препятствует, оператор буксирует поврежденный образец из-под огня противника или опасного района, до ближайшего укрытия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| УСТРОЙСТВО ДЛЯ СЦЕПКИ ИНЖЕНЕРНОЙ МАШИНЫ РАЗГРАЖДЕНИЯ С БУКСИРУЕМЫМ ОБЪЕКТОМ | 1995 |
|
RU2083381C1 |
| СПОСОБ РЕШЕНИЯ ОГНЕВОЙ ЗАДАЧИ ДИСТАНЦИОННО УПРАВЛЯЕМЫМ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ ВОЕННОГО НАЗНАЧЕНИЯ В АВТОНОМНОМ РЕЖИМЕ | 2024 |
|
RU2840168C1 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС С НОЖНИЧНЫМ ПОДЪЕМНИКОМ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2830637C1 |
| МАНИПУЛЯТОРНОЕ УСТРОЙСТВО РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2817120C1 |
| Боевой модуль робототехнического комплекса военного назначения с устройством прерывания очереди при стрельбе из автоматического оружия | 2023 |
|
RU2831825C1 |
| СПОСОБ СЦЕПКИ ТЯГАЧА С МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2152319C1 |
| Боевой модуль с магнитожидкостным компенсатором отдачи | 2023 |
|
RU2825790C1 |
| СПОСОБ ЭВАКУАЦИИ ОБЪЕКТОВ ПОДВИЖНОЙ ТЕХНИКИ ГРУППОЙ МАЛОГАБАРИТНЫХ РОБОТОТЕХНИЧЕСКИХ СРЕДСТВ | 2023 |
|
RU2819799C1 |
Изобретение относится к области робототехники. Устройство дистанционной сцепки для эвакуации наземных робототехнических комплексов военного назначения состоит из рамы-основания и троса с коушем. Рама-основание изготовлена U-образной формы с шарнирными креплениями для установки на корпус наземных робототехнических комплексов военного назначения. В средней и передней части рамы на кронштейнах смонтированы ролики, вокруг которых заводится трос с коническим коушем на конце. Трос намотан на катушку, вращение которой обеспечивается электродвигателем, а фиксация - храповым механизмом с электроприводом. Храповый механизм и электродвигатель болтовым соединением крепятся на корпусе наземных робототехнических комплексов военного назначения. Достигается повышение эффективности устройства за счет обеспечения его универсальности, что позволит эвакуировать поврежденные образцы наземных робототехнических комплексов военного назначения различными способами, в зависимости от их технического состояния. 2 з.п. ф-лы, 8 ил.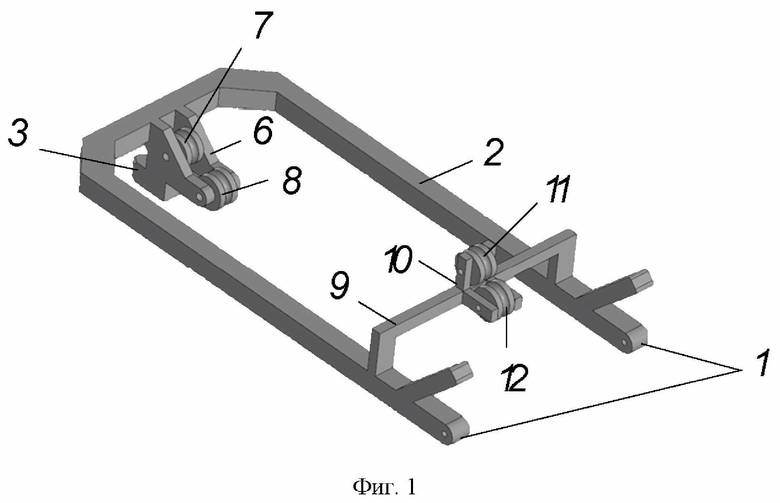
1. Устройство дистанционной сцепки для эвакуации наземных робототехнических комплексов военного назначения, состоящее из рамы-основания и троса с коушем, отличающееся тем, что рама-основание изготовлена U-образной формы с шарнирными креплениями для установки на корпус наземного робототехнического комплекса военного назначения, в средней и передней части которой на кронштейнах смонтированы ролики, вокруг которых заводится трос с коническим коушем на конце, намотанный на катушку, вращение которой обеспечивается электродвигателем, а фиксация - храповым механизмом с электроприводом, который также как и электродвигатель болтовым соединением крепится на корпусе наземного робототехнического комплекса военного назначения.
2. Устройство дистанционной сцепки для эвакуации наземных робототехнических комплексов военного назначения по п.1, отличающееся тем, что в передней части рамы-основания приварен металлический буфер с внутренней конической полостью и прорезью для троса.
3. Устройство дистанционной сцепки для эвакуации наземных робототехнических комплексов военного назначения по п.1, отличающееся тем, что на корпусе наземного робототехнического комплекса военного назначения установлены и жестко сварным соединением закреплены верхние и нижние ограничители.
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ РЕЖИМА КОНТАКТНОЙ СВАРКИ | 0 |
|
SU210967A1 |
| СПОСОБ СЦЕПКИ ТЯГАЧА С МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2152319C1 |
| УСТРОЙСТВО ДЛЯ СЦЕПКИ ЭВАКУАЦИОННОЙ МАШИНЫ С БУКСИРУЕМЫМ ОБЪЕКТОМ | 1996 |
|
RU2096191C1 |
| US 6073953 А, 13.06.2000 | |||
| Приспособление для перемещения матричных стержней в наборно-словолитных машинах системы "Типограф" | 1926 |
|
SU5433A1 |

