Изобретение относится к торговым (вендинговым) автоматам для выдачи штучных товаров.
Известно распределительное устройство для штучных грузов, включающее роботизированное устройство (робот), оснащенное запоминающим устройством, взаимодействующим с оптическим датчиком, и управляющее устройство для перемещения робота. В данном распределительном устройстве используется специальная метка, установленная у каждого отсека хранения товара, которая обнаруживается оптическим датчиком, установленными на роботе. Робот перемещается к товару по однажды сохраненным координатам. (Патент США №6421580, МПК B65G 1/00; B65G 1/04; G07F 11/62; G07F 7/00, опубл. 16.07.2002 г.)
Недостатком известного устройства является: ориентация системы позиционирования робота относительно места хранения товара. Так как в устройстве используются специальные метки (электромагнитные или светоотражающие), то в случае, если в процессе загрузки товара или ремонта оборудования эта метка будет повреждена или удалена, робот не сможет определить положение товара на полке и не сможет точно позиционироваться для забора товара. Кроме того, такая конструкция устройства не позволяет точно позиционировать робот в случае провисания полки в связи с повышенной нагрузкой на полку из-за большого веса товара, а также ее выпрямления по мере уменьшения веса давления на полку.
Еще одним существенным недостатком устройства является реализованный в устройстве способ определения координаты метки, а как следствие местонахождения товара на полке. В устройстве, в случае потери координаты метки, или самой метки, реализуется возможность последовательного перебора координат в заданном диапазоне вокруг координат потерянной метки, которые были сохранены в памяти блока управления. Этот последовательный перебор происходит только в горизонтальном положении, что исключает возможность нахождение метки в случае ее вертикального смещения, а также является ненадежным способом определения координаты метки на полке, и как следствие ведет к возможности ошибочного определения координаты роботом. Это может привести к невыдаче товара, а также к поломке самой конструкции.
Известно распределительное устройство для штучных товаров в торговом автомате, в котором устройство выдачи товара реализовано в виде системы стоек и рычагов и закрепленной между ними посредством крепежных элементов эластичной ткани. При приеме товара рычаг повернут так, что расстояние между элементами крепления минимально, эластичная ткань формирует пространство (емкость) для приема товара. При выгрузке товара ткань полностью растягивается, становится плоской и наклоняется так, что товар скользит по поверхности и выгружается (Патент США №7344050, МПК G07F 11/00, опубл. 18.03.2008 г. - прототип).
Недостаток известной конструкции - использование в качестве устройства выдачи товара рычажной системы с закрепленной между рычагами эластичной тканью. При таком варианте конструктивного выполнения устройства в процессе выдачи товара необходимо распрямить ткань, которая образовала петлю, где находится товар. При распрямлении товару придается ускорение, следствием которого может быть повреждение товара и выход из строя устройства.
Техническая задача, на решение которой направлено заявляемое изобретение, состоит в повышении надежности позиционирования системы перемещения товара (робота) относительно товара и повышение точности и надежности транспортировки товара с полки стеллажа до корзины робота и дальнейшей выдаче его клиенту без ухудшения его потребительских свойств.
Поставленная техническая задача решается тем, что в торговом автомате, включающем корпус, по меньшей мере, один стеллаж с полками, систему перемещения и позиционирования, по меньшей мере, одно устройство перемещения товара, устройство выдачи товара, систему управления, терминал заказа и оплаты товара, согласно предложенному изобретению, система перемещения и позиционирования включает, по меньшей мере, две горизонтальные направляющие и установленную между ними с возможностью скольжения несущую раму с вертикально размещенными внутри нее профилями, с закрепленными на них по всей длине подшипниками, в которой установлено с возможностью перемещения средство позиционирования с размещенным внутри устройством выдачи товара, содержащим лоток с вращающимся роликом и закрепленное на краю лотка и ролике полотно, средство позиционирования снабжено, по меньшей мере, одним датчиком-видеокамерой и, по меньшей мере, одним датчиком наличия товара, каждая полка стеллажа снабжена устройством перемещения товара, включающего корпус, выполненный из прямоугольного профиля, незамкнутого по верхней стенке с образованием продольного паза, в котором с возможностью перемещения установлена каретка с толкателем, в корпусе на осях установлены, по меньшей мере, два элемента вращения, с натянутым между ними тросом, соединенным с кареткой.
Заявленное изобретение характеризуется следующими дополнительными существенными признаками:
- корпус выполнен в виде каркаса из металлического профиля;
- корпус снабжен системой выравнивания корпуса относительно основания, выполненной в виде вмонтированных в основание корпуса винтовых опор;
- по меньшей мере, один элемент вращения выполнен в виде ведомой шестерни;
- по меньшей мере, один элемент вращения выполнен в виде ролика;
- несущая рама снабжена электромотором, установленным в нижней части рамы.
- по меньшей мере, одна горизонтальная направляющая снабжена электронными датчиками перемещения несущей рамы, установленными по краям направляющей;
- по меньшей мере, одна горизонтальная направляющая снабжена демпферами аварийного торможения, установленными по краям направляющей;
- в стеллаже полки соединены со стойками посредством разъемного замкового соединения;
- торговый автомат снабжен электродвигателем, обеспечивающим горизонтальное перемещение несущей рамы;
- средство позиционирования выполнено в виде прямоугольной рамы из жестко скрепленного между собой металлического профиля, к которой подвижно прикреплен механизм перемещения привода вращения с установленным на нем мотором привода вращения с элементом вращения, к механизму перемещения присоединен рычаг для наклона механизм перемещения привода в сторону полки стеллажа;
- механизм перемещения привода выполнен в виде прямоугольной металлической пластины со скошенным углом;
- рычаг для наклона механизм перемещения привода присоединен со стороны скоса;
- лоток устройства выдачи выполнен в виде каркаса с боковыми стенками и дном, вращающийся ролик закреплен на одном из краев каркаса со стороны стеллажа таким образом, что его верхняя кромка параллельна противоположному краю каркаса и не выступает за его пределы.
- на боковых стенках лотка выполнены отверстия;
- датчик наличия товара установлен на раме средства позиционирования соосно отверстиям на боковой стенке лотка;
- каждое устройство перемещения товара установлено на полке стеллажа с возможностью в рабочем положении зацепления элемента вращения с элементом вращения устройства выдачи товара;
- несущая рама снабжена, по меньшей, мере, одним датчиком вертикального перемещения;
- несущая рама снабжена, по меньшей мере, одним средством аварийного отключения системы перемещения и позиционирования;
- полки стеллажа выполнены с перфорацией, при этом отверстия по передней и задней стороне каждой полки размещены напротив друг друга.
- между стеллажами установлена дверь.
Технический результат состоит в повышении надежности позиционирования устройства выдачи перемещения товара относительно товара и повышении точности и надежности транспортировки товара с полки стеллажа до лотка устройства выдачи товара и дальнейшей выдаче его клиенту без ухудшения его потребительских свойств за счет предложенного конструктивного выполнения устройств перемещения и выдачи товара и обеспечения взаимодействия узлов устройства для автоматического определения изменения координаты товара и автоматической корректировки позиции устройства выдачи товара
Сущность технического решения поясняется рисунками, где
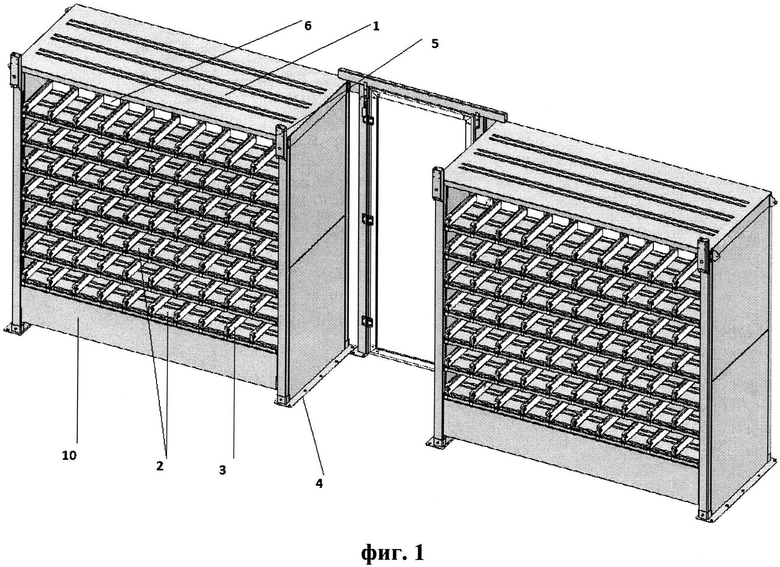
на фиг.1 изображен стеллаж торгового автомата (вид сбоку);
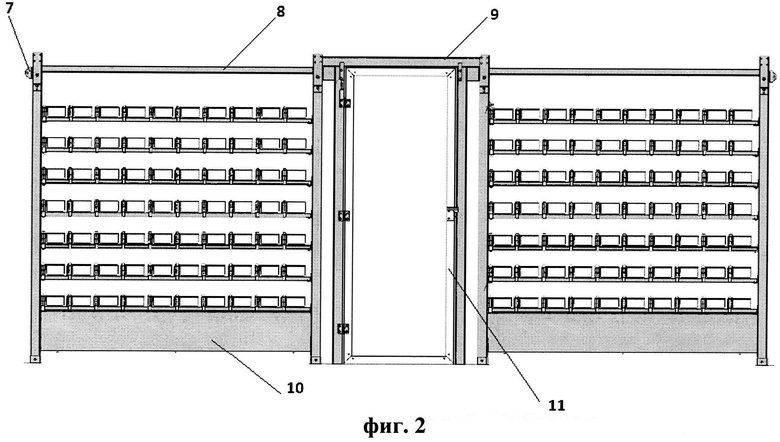
на фиг.2 изображен стеллаж торгового автомата (вид спереди);
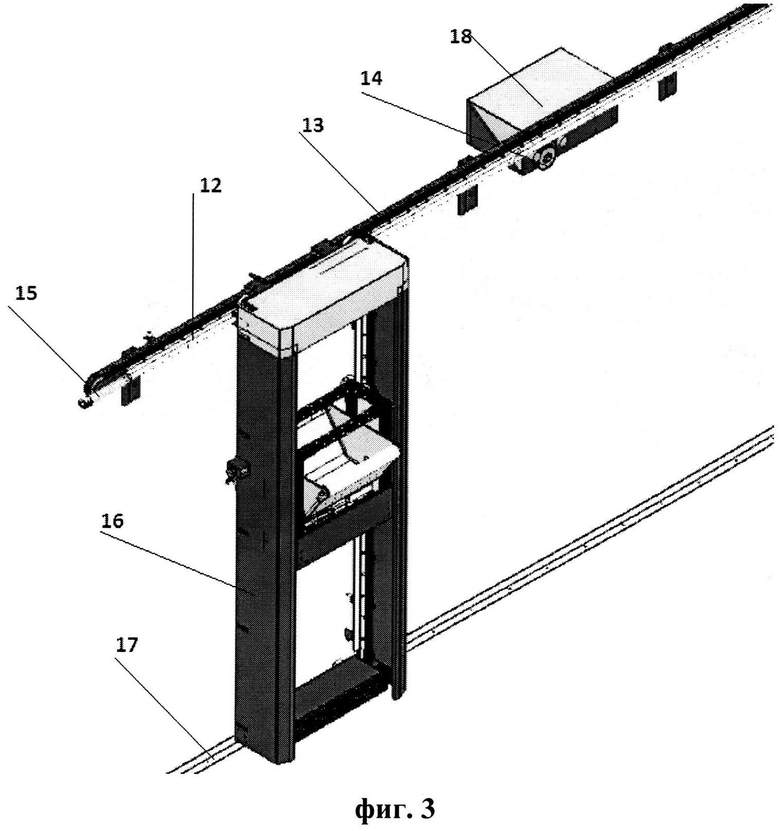
на фиг.3 представлен внешний вид системы перемещения и позиционирования устройства выдачи товара (вид спереди);
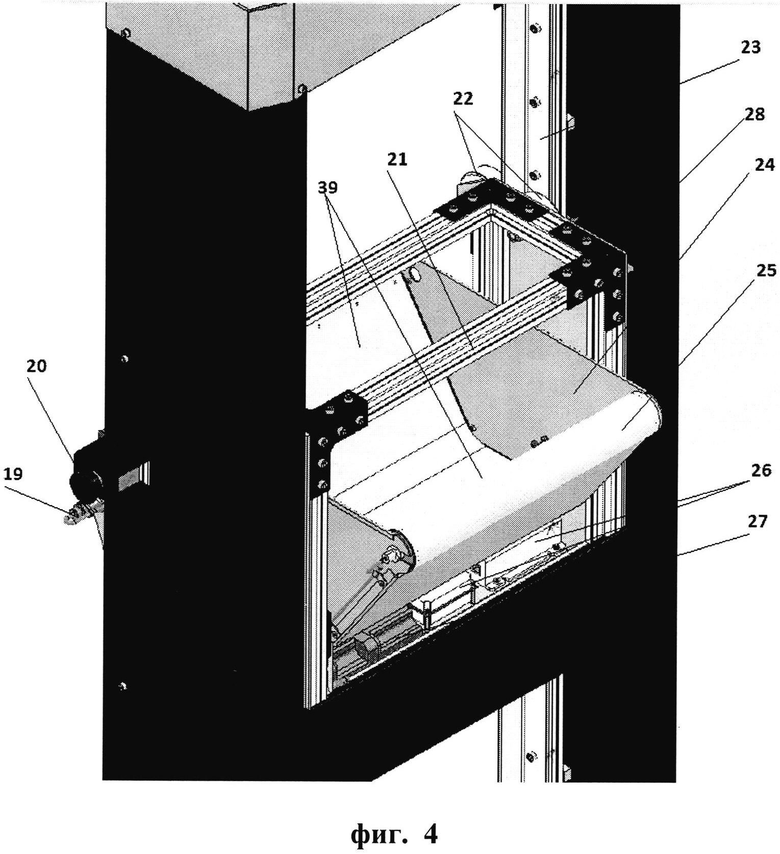
на фиг.4 представлен внешний вид системы позиционирования и устройства выдачи товара (вид спереди);
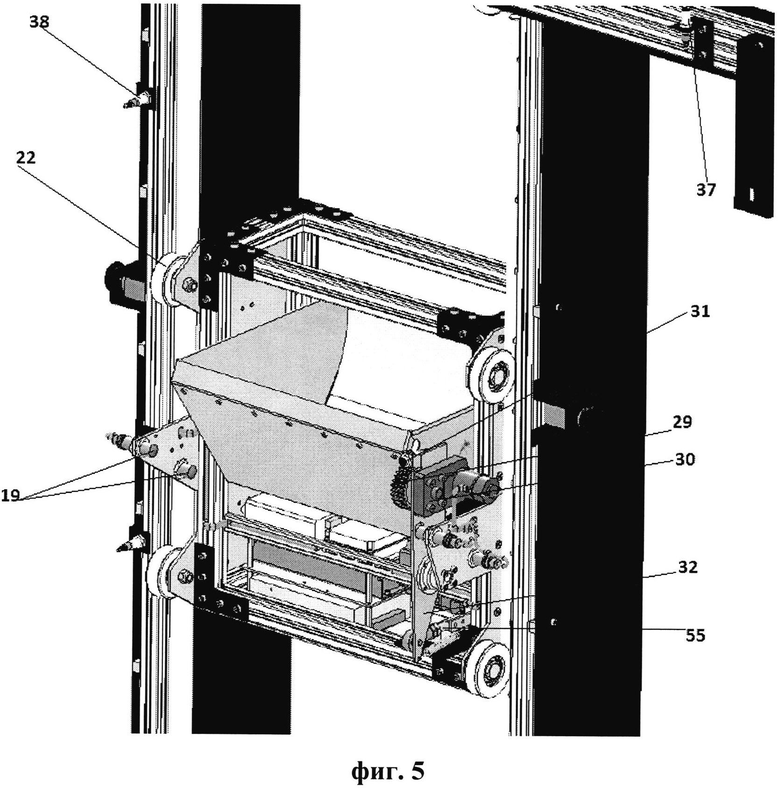
на фиг.5 представлен внешний вид системы позиционирования и устройства выдачи товара (вид сзади);
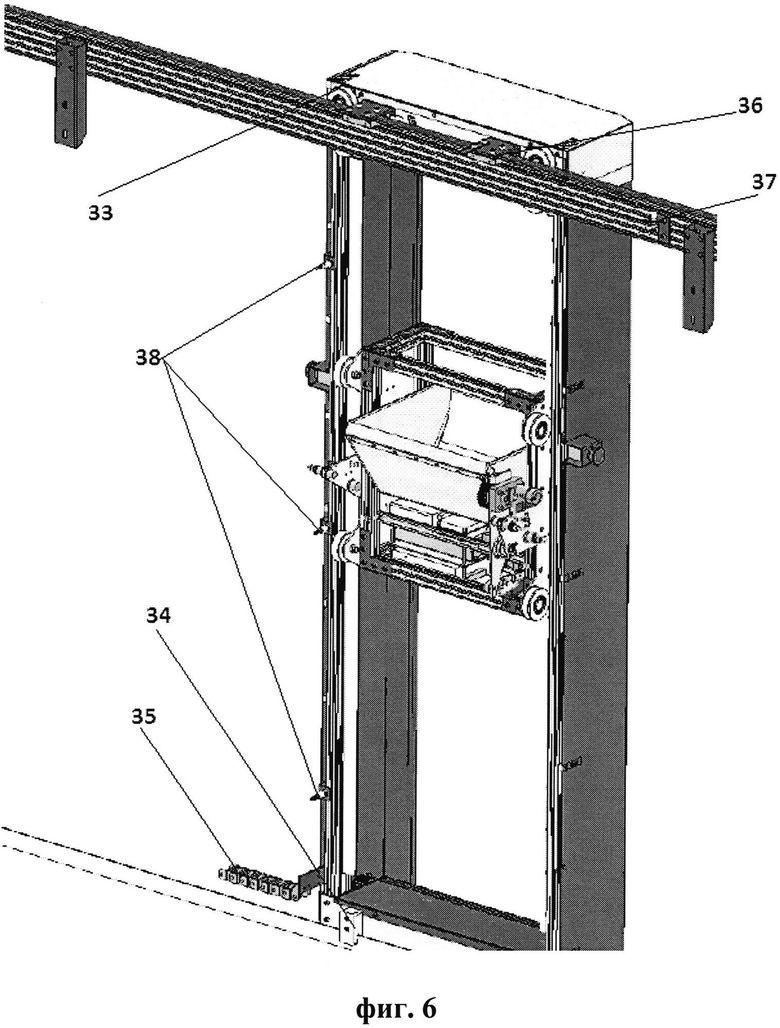
на фиг.6 представлен внешний вид системы перемещения (вид сзади)
на фиг.7 показан пример размещения системы перемещения и позиционирования устройства выдачи товара в рабочем состоянии относительно системы стеллажей;
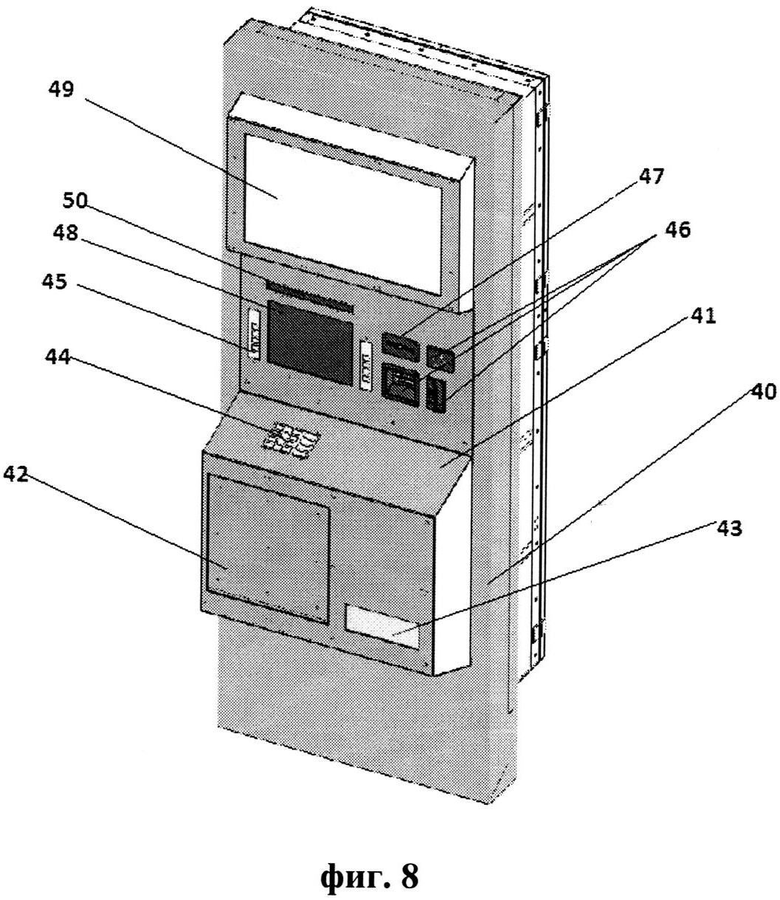
на фиг.8 представлен внешний вид терминала торгового автомата;
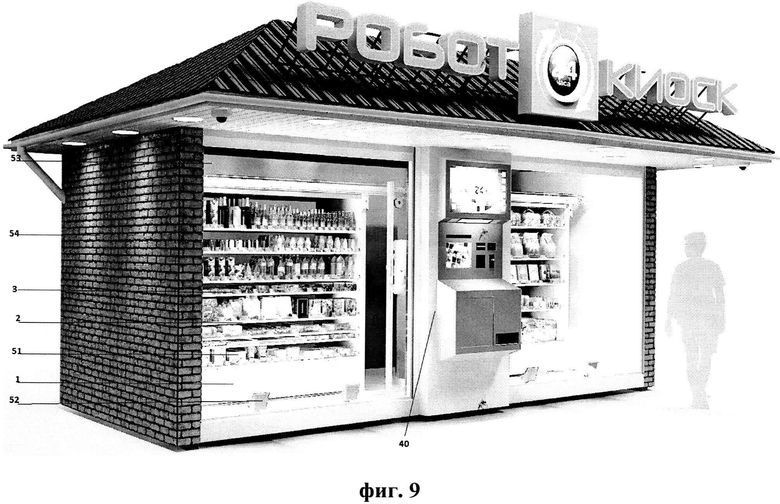
на фиг.9 приведен пример выполнения торгового автомата;
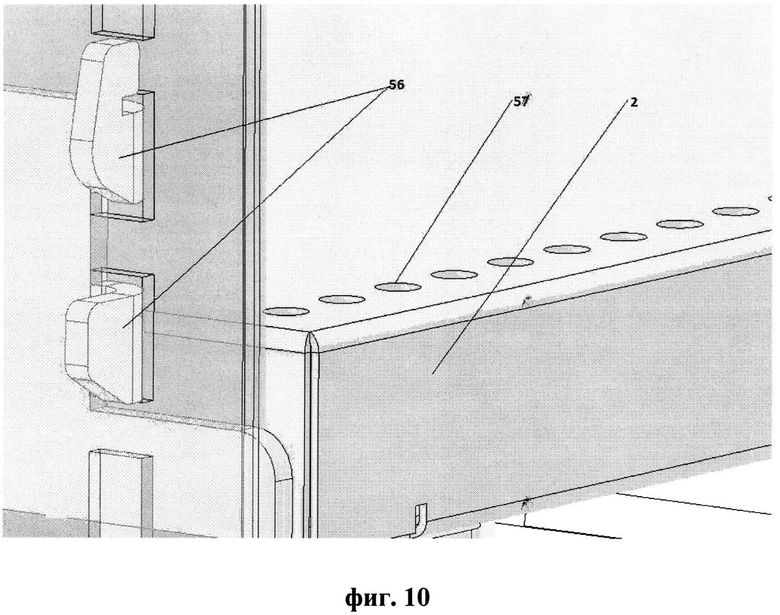
на фиг 10 представлен крепежный узел полки;
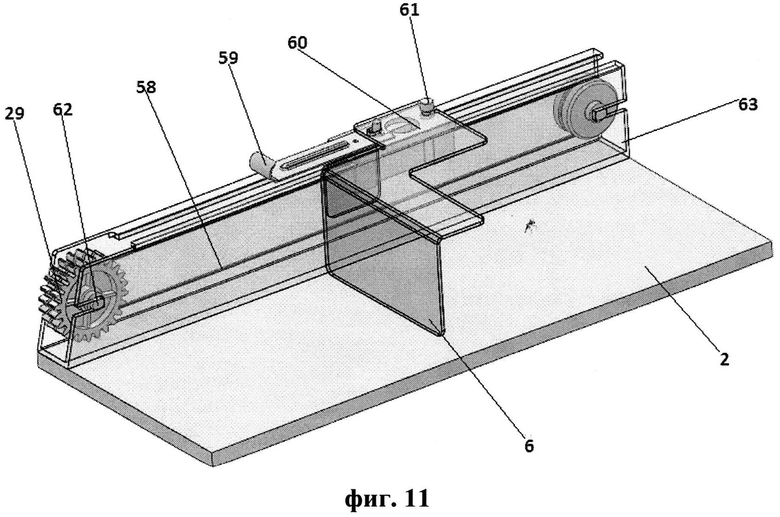
на фиг.11 - изображено устройство перемещения товара.
Торговый автомат включает корпус, стеллажи с полками, каждая из которых снабжена устройством перемещения товара, устройство выдачи товара, систему перемещения и позиционирования устройства выдачи товара, терминал заказа и оплаты товара, витрины, систему управления.
Корпус 54 (фиг.9) автомата представляет стальной сварной каркас, выполненный из металлического профиля с системой выравнивания корпуса относительно земли. Дополнительным преимуществом корпуса является возможность установки автомата на неподготовленную площадку. Для того, чтобы предотвратить неравномерность распределения веса автомата, в основание корпуса вмонтированы специальные винтовые опоры.
Внутри металлического корпуса 54 установлены специальные термоизоляционные панели, позволяющие сохранять внутри корпуса постоянную температуру, необходимую для выполнения специальных условий хранения товара. Температура внутри устройства может поддерживаться на уровне от +2 до +7 градусов Цельсия, при диапазоне изменения внешней температуры от - 35 до +40 градусов Цельсия.
В корпусе установлены витрины (53, фиг.9). За витринами, в нижней и верхней части каждой, установлены, по меньшей мере, 8 светильников освещения стеллажей (52, фиг.9). По четыре на каждый стеллаж.
Кроме того, в корпусе установлен терминал оплаты (40, фиг.9) с окном выдачи товара (42, фиг.8), через который покупатель осуществляет оплату товара, знакомится с перечнем возможных функций устройства, а также получает купленный товар. Также терминал оснащен чековым принтером (47, фиг.8), установленным на лицевой панели (41, фиг.8), изготовленной из металла, окном (50, фиг.8) для установки видеокамеры безопасности, по меньшей мере, двумя вспомогательными клавиатурами (45, фиг.8) по обе стороны дисплея заказа (48, фиг.8), окном выдачи сдачи клиенту (43, фиг.8), а также дисплеем (49, фиг.8) для демонстрации рекламы или других целей.
В корпусе установлены стеллажи 1 с полками (2, фиг.9 и фиг.1), закрепленные между собой специальным кронштейном (9, фиг.2). Данный кронштейн установлен для предотвращения горизонтального сдвига стеллажей. Также стеллажи прикреплены к полу с помощью анкерных болтов через отгиб (4, фиг.1) по каждой стороне упорной части. На верхних торцах боковой стенки стеллажей, со стороны стены автомата установлены кронштейны боковой растяжки (7, фиг.2), к которым крепится регулируемый натяжной трос для жесткой фиксации всей стеллажной конструкции в пространстве. Расстояние между стойками стеллажей 1 снизу, до первой полки, закрыто металлической декоративной накладкой (10, фиг.1), которая служит дополнительным ребром жесткости стеллажа.
Жесткое крепление стеллажей как в пространстве внутри корпуса автомата, так и между собой позволяет точно позиционировать устройство выдачи товара относительно товара. Для усиления конструкции стеллажей использованы, по меньшей мере, четыре верхних продольных металлических ребра жесткости (8, фиг.2), установленных в верхней части каждого стеллажа, как по задней, так и по передней стороне. Между стеллажами может быть установлена дверь (11, фиг.2), изготовленная из металлического профиля для предотвращения доступа в зону перемещения системы позиционирования и возможного повреждения обслуживающего персонала во время его работы. Также, с целью обеспечения безопасности, по обе стороны несущей рамы (16, фиг.3) установлены средства аварийного выключения системы перемещения и позиционирования, которые полностью отключают движение системы перемещения и позиционирования вдоль стеллажей.
Полка (2, фиг.10) стеллажа соединена со стойками стеллажа посредством разъемного замкового соединения (56, фиг.10), что позволяет производить ее быструю замену, а также четко позиционирует полку в пространстве. Для быстрой смены и точного позиционирования устройства перемещения товара 11, на полке 2 по передней и задней стороне сделаны перфорации, отверстия (57, фиг.10) которых находятся напротив друг друга.
Весь товар расположен на полках (2, фиг.9) за витриной (53, фиг.9). Товар выкладывается на полках друг за другом.
Каждая полка снабжена устройством перемещения товара (3, фиг.1 и фиг.11), содержащего толкатель. Разные виды товара (колонки) разделены между собой устройством перемещения товара (3, фиг.1 и фиг.11).
Толкатель (64, фиг.11) предназначен для перемещения товара с полки в устройство выдачи товара.
В рабочем положении устройство перемещения товара входит в зацепление с приводом вращения устройства выдачи товара и перемещает товар в лоток устройства выдачи товара.
Устройство перемещения товара 3 включает корпус (63, фиг.11), выполненный из прямоугольного профиля, незамкнутого по верхней стенке с образованием продольного паза, по меньшей мере, два элемента вращения (29, фиг.11), установленные в корпусе на осях (62, фиг.11); установленную в продольном пазу каретку, металлический рычаг окончания товара (59, фиг.11), установленный на подшипнике скольжения (60, фиг.11), усилие на который передается через элементы вращения (29, фиг. 11). Подшипник обеспечивает возможность скольжения каретки по всей длине паза. На подшипнике скольжения (60, фиг.11) закреплен посредством двух шпилек (61, фиг.11) толкатель (6, фиг.11), который устанавливается за последним в колонке товаром и, воздействуя на него, перемещает все товары вперед к краю полки (2, фиг.9). Ширина плеча толкателя равна расстоянию между двумя устройствами перемещения 3. Между элементами вращения натянут трос, закрепленный на каретке.
Элементы вращения устройства перемещения товара могут быть выполнены как в виде ведомой шестерни (29, фиг.11) так и ролика соответственно, как показано на фиг.11.
Ведомая шестерня и/или ролик выполнены с кольцевой проточкой для укладки троса. Трос уложен в кольцевую проточку на ведомой шестерне или ролике и закреплен в подшипнике скольжения так, что одна его часть жестко закреплена внутри подшипника скольжения (60, фиг.11), а вторая закольцована посредством фиксации через пружину, работающую как на сжатие, так и на разжим. Данная конструкция позволяет избежать излишней нагрузки на мотор, контролирует натяжение троса и не позволяет ведомому ролику либо шестерне «закусить» трос.
В процессе эксплуатации момент с двигателя передается с помощью зубчатого колеса на ведомую шестерню привода троса, вращающий момент ведомой шестерни с помощью силы трения тянет трос и посредством него приводит в движение подвижную каретку с закрепленным на ней толкателем. Каретка передает приложенное усилие на толкатель, который легко скользит над поверхностью полки, подталкивая товар к краю полки для последующего помещения в устройство выгрузки и выдачи товара потребителю.
Длина корпуса устройства перемещения товара соответствует глубине полки (2, фиг.1 и фиг.11).
Количество стеллажей и витрин, а также терминалов может варьироваться в зависимости от исполнения торгового автомата
Торговый автомат оснащен системой перемещения и позиционирования, предназначенной для транспортировки и выдачи товара от места хранения на стеллаже (фиг.1 и 2) до окна выдачи (42, фиг.8) его покупателю.
Система перемещения и позиционирования включает (фиг.3), по меньшей мере, две горизонтальные направляющие (12 и 17, фиг.3) и установленную между ними с возможностью скольжения несущую раму (16, фиг.3), внутри которой установлено устройство выдачи товара, размещенное в средстве позиционирования (21, фиг.4), одна из горизонтальных направляющих снабжена электронными датчиками (37, фиг.5) перемещения несущей рамы (16, фиг.3).
Верхняя горизонтальная направляющая (12, фиг.3) жестко связана со стеллажами крепежным элементом (5, фиг.1), нижняя горизонтальная направляющая (17, фиг.3) жестко связана с основанием корпуса торгового автомата.
Преимуществом такого крепления системы перемещения и позиционирования является то, что при возможном смещении оси координат стеллажа, координаты системы перемещения относительно стеллажа остаются неизменными, что позволяет добиться точного позиционирования устройства выдачи товара относительно полок и товара.
Несущая рама образована двумя жестко связанными вертикальными направляющими профилями. Несущая рама снабжена роликами скольжения (33, фиг.6), посредством которых рама опирается на верхний профиль горизонтального перемещения (12, фиг.3). Ролик (33, фиг.6) обычно выполняется из пластика с высоким коэффициентом износостойкости.
В нижней части несущей рамы (16, фиг.3) установлены, по меньшей мере, два подшипника скольжения (34, фиг.6), которые двигаются по нижнему профилю горизонтального перемещения (17, рис.3), жестко прикрепленному к основанию корпуса. В качестве материала для подшипника (34, рис.6) используется пластмасса с высоким коэффициентом износостойкости.
Для подключения всех устройств, установленных на несущей раме (16, фиг.3), используется кабель, уложенный в специальный гибкий кабель-канал (35, фиг.6).
На фиг.3 и 7 схематично показан принцип перемещения несущей рамы (16, фиг.3) вдоль стеллажной системы (1, фиг.7). Для этого используется электродвигатель (18, рис.3), установленный вверху стеллажной системы. Перемещение по горизонтали осуществляется за счет ремня (13, фиг.3), к которому через два фиксатора (36, фиг.6) крепится несущая рама (16, фиг.3). Ремень закреплен по краям стеллажей посредством двух роликов (14, фиг.3), связанных с профилем горизонтального перемещения (12, фиг.3). Еще один ролик (14, фиг.3) установлен на электродвигателе (18, фиг.3), который отвечает за горизонтальное перемещение несущей рамы (16, фиг.3).
С целью предотвращения выезда несущей рамы (16, фиг.3) за габариты стеллажной системы, на верхнем профиле (12, фиг.3) установлены электронные датчики (37, фиг.5), которые отслеживают перемещение несущей рамы (16, фиг.3). На случай отказа этих датчиков по краям стеллажной системы установлены демпферы аварийного торможения (15, фиг.3). Демпфер 15 выполнен в виде опоры с пружиной и начинает срабатывание через несколько миллиметров после того, как несущая рама (16, фиг.3) выходит за габариты стеллажной системы (1, фиг.1).
В несущей раме установлено с возможностью перемещения средство позиционирования 21 (фиг.4), внутри которого размещено устройство выдачи товара.
Устройство выдачи товара содержит лоток (24, фиг.4), выполненный в виде каркаса с боковыми стенками и дном, каркас снабжен вращающимся роликом, установленным на одном из краев каркаса. Каркас выполнен металлическим. Внутри каркаса закреплено эластичное полотно (39, фиг.4), один край эластичного полотна жестко прикреплен к свободному краю каркаса, второй край эластичного полотна прикреплен к вращающемуся ролику, установленному на краю каркаса лотка со стороны стеллажа (1, фиг.1)
Вращающийся ролик (25, фиг.4) закреплен таким образом, что его верхняя кромка параллельна противоположному краю каркаса и не выступает за его пределы.
Ролик (25, фиг.4) управляется главным контроллером устройства управления таким образом, что в момент получения товара с полки стеллажа, эластичное полотно (39, фиг.4) наматывается на ролик (25, фиг.4) на столько, чтобы нижняя часть полотна отошла от металлического дна лотка (24, фиг.4) и имела минимальный провис по отношению к краям лотка. При этом расстояние между товаром и дном лотка (24, фиг.4) сокращается, и соответственно, транспортируемый с полки (2, рис.1) товар мягко укладывается в лоток. После этого ролик (25, фиг.4) разматывает полотно (39, фиг.4) и товар мягко опускается на дно лотка (24, фиг.4) для его дальнейшей транспортировки. При заказе нескольких товаров одновременно, такая технология управления роликом (25, фиг.4) и самим полотном (39, фиг.4), позволяет мягко получать хрупкий товар с полки и также мягко, за счет прогиба полотна выдавать хрупкий товар покупателю, и таким образом исключить деформацию или повреждение упаковки и самого товара.
Перемещение лотка (24, рис.3) по вертикали внутри несущей рамы (16, рис.3) обеспечивается средством позиционирования (21, фиг.4) устройства выдачи товара.
Средство позиционирования (21, фиг.4) представляет собой прямоугольную раму, выполненную из металлического профиля, скрепленного между собой крепежными уголками в трех плоскостях (28, фиг.4). В нижней части установлены мотор поворота лотка (27, фиг.4) и системы управления средством позиционирования (26, фиг.4).
Средство позиционирования перемещается по двум профилям (23, фиг.4), вертикально установленным внутри несущей рамы (16, фиг.3) при помощи восьми подшипников (22, фиг.4), выполненных в виде роликов, которые установлены по обе стороны каждого профиля (23, фиг.4) и максимально разнесены по все высоте рамы, практически на всю ее длину, чтобы исключить колебание рамы средства позиционирования во время движения. Для точного определения места выгрузки товара, а также, чтобы средство позиционирования (21, фиг.4) при вертикальном перемещении не выходило за рамки габаритов несущей рамы (16, фиг.3), установлены, по меньшей мере, три электронных датчика (38, фиг.5 и фиг.6) вертикального перемещения. Для достижения жесткости рамы средства позиционирования (21, фиг.4), и как следствие точного позиционирования устройства выдачи товара относительно товара, рама выполнена из металлического профиля, скрепленного между собой крепежными уголками (28, фиг.4) в трех плоскостях.
Движение рамы средства позиционирования (21, фиг.4) по вертикали осуществляется при помощи троса или ремня (13, фиг.3), который жестко прикреплен к раме средства позиционирования (21, фиг.4) и приводится в движение электромотором, установленным в нижней части несущей рамы (16, фиг.3).
На раме средства позиционирования также установлен механизм перемещения привода вращения (32, фиг.5), на котором находится мотор привода вращения (30, фиг.5) с элементом вращения (29, фиг.5). Механизм перемещения привода (32, фиг.5) представляет собой прямоугольную металлическую пластину со скошенным углом, прикрепленную к раме средства позиционирования (21, фиг.4) через подшипник, который позволяет перемещать механизм вокруг оси подшипника. Со стороны скоса, к механизму перемещения (32, фиг.5) присоединен рычаг (55, фиг.5), который в свою очередь, наклоняет весь механизм в сторону полки (2, фиг.1) стеллажа (1, фиг.1).
На средстве позиционирования установлен, по меньшей мере, один датчик-видеокамера, обеспечивающий точное позиционирование лотка устройства выдачи товара относительно полки и товара. Дополнительным преимуществом использования датчика-видеокамеры при определении координаты устройства выдачи товара является система визуального распознавания места остановки средства позиционирования устройства выдачи товара, что позволяет добиться максимальной точности позиционирования.
Изначальные координаты всех полок и установленных на них толкателей (3, фиг.1) определяются путем автоматического сканирования всего пространства стеллажа (1, фиг с.1) с использованием датчика-видеокамеры. После чего в базу данных устройства управления вносятся координаты каждой полки (2, фиг.1) и каждого устройства перемещения товара (3, фиг.1). Координата товара, в которую необходимо переместиться лотку (24, фиг.4), считывается из базы данных устройства управления. Таким образом, изначально лоток (24, рис.4) перемещается к товару по сохраненным координатам. В заданной координате включается дополнительная коррекция координат следующим образом: Датчик-видеокамера (31, фиг.5) считывает метку, находящуюся под или на устройстве перемещения товара (3, фиг.1), и в случае отклонения координат корректирует положение лотка (24, фиг.3) относительно этой метки. Меткой может служить корпус устройства перемещения товара, но могут быть и другие варианты размещения меток.
Наличие в заявляемом торговом автомате отдельно электромоторов для перемещения несущей рамы (16, фиг.3) и рамы средства позиционирования (21, фиг.4) решает проблему диагонального перемещения устройства выдачи товара к заданной точке у стеллажа.
После того, как лоток (24, фиг.4) переместиться к заданному месту хранения товара на стеллаже, рычаг (55, фиг.5) сдвигает механизм перемещения (32, фиг.5) и наклоняет лоток (24, фиг.4) в сторону полки (2, фиг.1) до тех пор, пока элементы вращения (29, фиг.5 и фиг.11) устройства перемещения товара и устройства выдачи товара не войдут в зацепление. Далее включается мотор (30, фиг.5) привода вращения (30, фиг.5), и толкатель (64, фиг.11) перемещает товар, лежащий на полке, в лоток (24, фиг.4). После чего, привод вращения (30, фиг.5) включается в обратную сторону и отводит толкатель (64, фиг.11) так, чтобы исключить возможное давление на товар.
На раме средства позиционирования (21, фиг.4) установлен, по меньшей мере, один датчик (19, фиг.5) наличия товара в лотке. В предпочтительном варианте выполнения устанавливаются два датчика наличия товара в лотке. Датчики (19, фиг.5) располагаются таким образом, что контролируют приемную плоскость лотка (24, фиг.4), повернутого в положение получения товара с полки. Напротив датчиков, на стенках лотка выполнены специальные отверстия, которые совмещаются с датчиками (19, фиг.5) и находятся практически на одном уровне с приемной плоскостью лотка. (24, рис.4). Первый датчик (19, фиг.5) контролирует линию «перехода» товара с полки (2, фиг.1) в лоток (24, фиг.4), второй датчик (19, фиг.5), установлен напротив середины приемной плоскости лотка (24, фиг.4) и дублирует показания первого датчика. Такая установка датчиков позволяет определить товар любого размера, попавший в лоток.
После того, как товар переместился в лоток, датчики наличия товара в лотке (19, фиг.5) фиксируют наличие товара в лотке, мотор привода перемещения товара (30, фиг.5) останавливается, лоток (24, фиг.4) принимает вертикальное положение и несущая рама (16, фиг.3) перемещается к терминалу (40, фиг.9), а рама средства позиционирования (21, фиг.4) перемещает лоток (24, фиг.4) с товаром к окну выдачи товара (42, фиг.8). Рычаг (55, фиг.5) сдвигает механизм перемещения (32, фиг.5) и наклоняет лоток (24, фиг.4) в сторону окна выдачи товара (42, фиг.8), и одновременно с этим ролик (25, фиг.4) устройства выдачи товара начинает сматывать ткань. В результате, товар мягко перемещается из лотка (24, фиг.4) в окно выдачи (42, фиг.8). Окно выдачи товара поворачивается в сторону покупателя, после чего купленный товар становится доступен.
Торговый автомат работает следующим образом.
Лоток (24, фиг.4) устройства выдачи товара свободно перемещается между полками стеллажа (2, фиг.9) и окном выдачи товара (42, фиг.8) как в горизонтальном, так и вертикальном направлении. Горизонтальное направление обеспечивает несущая рама (16, фиг.3) системы перемещения, а вертикальное направление обеспечивает средство позиционирования (21, фиг.4) устройства выдачи товара. При одновременном горизонтальном и вертикальном перемещении, лоток (24, фиг.4) перемещается по диагонали.
Выбор товара осуществляется с клавиатуры (44, фиг.8) либо прямым выбором на дисплее (48, фиг.8).
После выбора одного или группы товаров, на дисплее отображается заказ клиента и цена. После чего производится оплата. Оплата может производиться любым способом, например: монеты, банкноты или кредитные карты, через платежные системы (46, фиг.8), установленные на терминале.
После проведения оплаты товар (51, фиг.9) из соответствующего заказу отсека поступает в лоток (24, фиг.4) устройства выдачи товара, после чего транспортируется к терминалу (40, фиг.8) и выдается клиенту через окно выдачи (42, фиг.8).
| название | год | авторы | номер документа |
|---|---|---|---|
| Торговый автомат | 2021 |
|
RU2767160C1 |
| Торговый автомат для выдачи штучных товаров | 2022 |
|
RU2796049C1 |
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ И ВЫДАЧИ ТОВАРНЫХ ПРЕДМЕТОВ | 2018 |
|
RU2672936C1 |
| ТОРГОВЫЙ АВТОМАТ И УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ТОВАРОВ ДЛЯ ИСПОЛЬЗОВАНИЯ В НЕМ | 2015 |
|
RU2583773C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОЙ ВЫДАЧИ ТОВАРОВ | 2018 |
|
RU2672939C1 |
| Лоток для выдачи товара торгового автомата и способ использования лотка для выдачи товара | 2022 |
|
RU2799391C1 |
| Автомат для выдачи товара или приза и способ розыгрыша выдачи случайным образом товара или приза с помощью этого автомата | 2022 |
|
RU2784193C1 |
| Вендинговый аппарат для автоматической продажи готовых пищевых продуктов | 2023 |
|
RU2816568C1 |
| УСТРОЙСТВО для ХРАНЕНИЯ И ПОШТУЧНОЙ ВЫДАЧИПРЕДМЕТОВ | 1970 |
|
SU264831A1 |
| ТОРГОВЫЙ АВТОМАТ | 2019 |
|
RU2710033C1 |
Изобретение относится к торговым автоматам для выдачи штучных товаров. Технический результат - повышение надежности позиционирования устройства выдачи и перемещения товара относительно товара и повышение точности и надежности транспортировки товара с полки стеллажа до лотка устройства выдачи товара и дальнейшей выдаче его клиенту без ухудшения его потребительских свойств. Торговый автомат включает корпус, по меньшей мере, один стеллаж с полками, систему перемещения и позиционирования, по меньшей мере, одно устройство перемещения товара, устройство выдачи товара, систему управления, терминал заказа и оплаты товара, система перемещения и позиционирования включает, по меньшей мере, две горизонтальные направляющие, и установленную между ними с возможностью скольжения несущую раму с вертикально размещенными внутри нее профилями, с закрепленными на них по всей длине подшипниками, в которой установлено с возможностью перемещения средство позиционирования с размещенным внутри устройством выдачи товара, содержащим лоток с вращающимся роликом и закрепленное на краю лотка и ролике полотно, средство позиционирования снабжено, по меньшей мере, одним датчиком-видеокамерой и, по меньшей мере, одним датчиком наличия товара, каждая полка стеллажа снабжена устройством перемещения товара, включающего корпус, выполненный из прямоугольного профиля, незамкнутого по верхней стенке с образованием продольного паза, в котором с возможностью перемещения установлена каретка с толкателем, в корпусе на осях установлены, по меньшей мере, два элемента вращения, с натянутым между ними тросом, соединенным с кареткой. 20 з.п. ф-лы, 11 ил.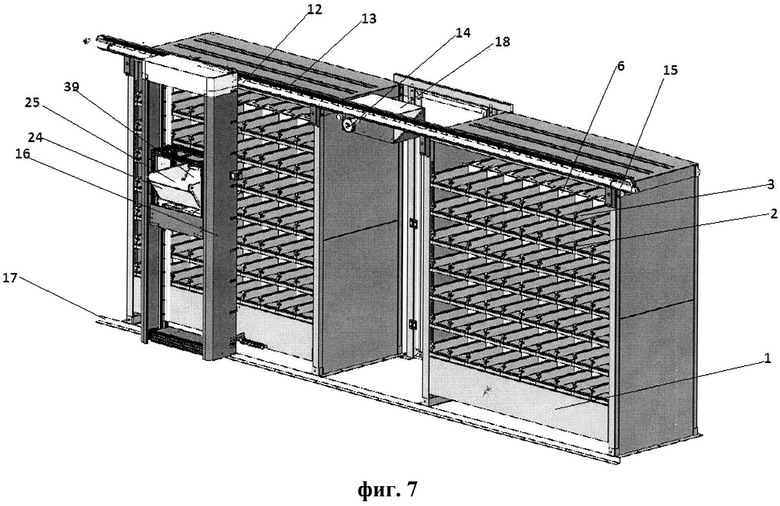
1. Торговый автомат, включающий корпус, по меньшей мере, один стеллаж с полками, систему перемещения и позиционирования, по меньшей мере, одно устройство перемещения товара, устройство выдачи товара, систему управления, терминал заказа и оплаты товара, отличающийся тем, что система перемещения и позиционирования включает, по меньшей мере, две горизонтальные направляющие и установленную между ними с возможностью скольжения несущую раму с вертикально размещенными внутри нее профилями, с закрепленными на них по всей длине подшипниками, в которой установлено с возможностью перемещения средство позиционирования с размещенным внутри устройством выдачи товара, содержащим лоток с вращающимся роликом и закрепленное на краю лотка и ролике полотно, средство позиционирования снабжено, по меньшей мере, одним датчиком-видеокамерой и, по меньшей мере, одним датчиком наличия товара, каждая полка стеллажа снабжена устройством перемещения товара, включающего корпус, выполненный из прямоугольного профиля, незамкнутого по верхней стенке с образованием продольного паза, в котором с возможностью перемещения установлена каретка с толкателем, в корпусе на осях установлены, по меньшей мере, два элемента вращения, с натянутым между ними тросом, соединенным с кареткой.
2. Торговый автомат по п.1, отличающийся тем, что корпус выполнен в виде каркаса из металлического профиля.
3. Торговый автомат по п.2, отличающийся тем, что корпус снабжен системой выравнивания корпуса относительно основания, выполненной в виде вмонтированных в основание корпуса винтовых опор.
4. Торговый автомат по п.1, отличающийся тем, что, по меньшей мере, один элемент вращения выполнен в виде ведомой шестерни.
5. Торговый автомат по п.1, отличающийся тем, что, по меньшей мере, один элемент вращения выполнен в виде ролика.
6. Торговый автомат по п.1, отличающийся тем, что несущая рама снабжена электромотором, установленным в нижней части рамы.
7. Торговый автомат по п.1, отличающийся тем, что, по меньшей мере, одна горизонтальная направляющая снабжена электронными датчиками перемещения несущей рамы, установленными по краям направляющей.
8. Торговый автомат по п.1, отличающийся тем, что, по меньшей мере, одна горизонтальная направляющая снабжена демпферами аварийного торможения, установленными по краям направляющей.
9. Торговый автомат по п.1, отличающийся тем, что в стеллаже полки соединены со стойками посредством разъемного замкового соединения.
10. Торговый автомат по п.1, отличающийся тем, что снабжен электродвигателем, обеспечивающим горизонтальное перемещение несущей рамы.
11. Торговый автомат по п.1, отличающийся тем, что средство позиционирования выполнено в виде прямоугольной рамы из жестко скрепленного между собой металлического профиля, к которой подвижно прикреплен механизм перемещения привода вращения с установленным на нем мотором привода вращения с элементом вращения, к механизму перемещения присоединен рычаг для наклона механизм перемещения привода в сторону полки стеллажа.
12. Торговый автомат по п.11, отличающийся тем, что механизм перемещения привода выполнен в виде прямоугольной металлической пластины со скошенным углом.
13. Торговый автомат по пп.11 и 12, отличающийся тем, что рычаг для наклона механизма перемещения привода присоединен со стороны скоса.
14. Торговый автомат по п.1, отличающийся тем, что лоток устройства выдачи выполнен в виде каркаса с боковыми стенками и дном, вращающийся ролик закреплен на одном из краев каркаса со стороны стеллажа таким образом, что его верхняя кромка параллельна противоположному краю каркаса и не выступает за его пределы.
15. Торговый автомат по пп.1 и 14, отличающийся тем, что на боковых стенках лотка выполнены отверстия.
16. Торговый автомат по п.1, отличающийся тем, что датчик наличия товара установлен на раме средства позиционирования соосно отверстиям на боковой стенке лотка.
17. Торговый автомат по п.1, отличающийся тем, что каждое устройство перемещения товара установлено на полке стеллажа с возможностью в рабочем положении зацепления элемента вращения с элементом вращения устройства выдачи товара.
18. Торговый автомат по п.1, отличающийся тем, что несущая рама снабжена, по меньшей мере, одним датчиком вертикального перемещения.
19. Торговый автомат по п.1, отличающийся тем, что несущая рама снабжена, по меньшей мере, одним средством аварийного отключения системы перемещения и позиционирования.
20. Торговый автомат по п.1, отличающийся тем, что полки стеллажа выполнены с перфорацией, при этом отверстия по передней и задней стороне каждой полки размещены напротив друг друга.
21. Торговый автомат по п.1, отличающийся тем, что между стеллажами установлена дверь.
| Способ эмульсирования короткого лубяного волокна в кипах и устройство для его осуществления | 1955 |
|
SU104750A1 |
| Способ количественного определения склонности арматурной стали к образованию горячих трещин при сварке | 1956 |
|
SU111933A1 |
| Дифференциальный глубинный манометр | 1954 |
|
SU101557A1 |
| Способ обработки подсолнечного ядра и других маслосодержащих ядер и орехов | 1944 |
|
SU66089A1 |
| US 7344050 B2, 18.03.2008 | |||
| US 6421580 B1, 16.07.2002 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |

