Заявляемый объект относится к технике бистатической гидролокации (или способам бистатической гидролокации), в которой связь между разнесенными в пространстве излучающей и приемной позициями (или несколькими приемными позициями) осуществляют по гидроакустическому каналу. Заявляемый объект может быть использован в общем случае при совместной работе не мене чем одной излучающей позиции и более чем одной приемной позиции, т.е. в мультистатическом гидролокаторе. Однако название этого объекта (где указан бистатический гидролокатор) ориентировано на минимальный состав гидролокатора (включающего по одной излучающей и приемной позиции).
Наиболее распространены гидролокаторы моностатические, т.е. такие, в которых излучающие позиции совмещены в пространстве; в большинстве случаев у них вообще одна и та же антенна, выполняющая функции и излучения, и приема (т.е. обратимая антенна) (см. например, И.К. Колесникова, И.А. Румынская. Основы гидроакустики и гидроакустические станции. Л.: Судостроение, 1970, рис.11.6 на с.267, рис.11.13 на с.274 и рис.11.16 на с.277); А.П. Евтютов и др. Справочник по гидроакустике. Л.: Судостроение. 1982, рис.1.3 на с.9). Основным недостатком таких гидролокаторов является, в частности, отсутствие возможности оптимизации формы контролируемой зоны за счет варьирования величины и направления выноса излучающей или приемной позиций.
Указанного недостатка лишены гидролокаторы бистатические. Их аналогами являются радиолокаторы, описанные, например, в книгах В.А. Аверьянов. Разнесенные радиолокационные станции и системы. Минск: Наука и техника. 1978. рис.66 на с.150; В.С. Кондратьев и др. Многопозиционные радиотехнические системы. М.: Радио и связь. 1986. с.14, 15). К преимуществам бистатических гидролокаторов в сравнении с более традиционными моностатическими следует отнести (наряду с возможностью возможности оптимизации формы контролируемой зоны за счет варьирования величины и направления выноса излучающей или приемной позиций):
- потенциальная возможность надежной маскировки приемной позиции, поскольку демаскирующее действие связано только с излучением;
- снижение эффективности гидроакустического и электронного противодействия, так как характеристики и положение приемной позиции могут быть от потенциального противника скрыты;
- возможность увеличения эффективной поверхности отражения цели благодаря геометрическим эффектам, связанным с разнесением излучающей и приемной позиций.
Важной особенностью бистатического гидролокатора является существенное расстояние между излучающей позицией, которая является источником гидроакустического зондирующего сигнала, и одной или несколькими приемными позициями, обеспечивающими обнаружение эхосигналов. Такая архитектура требует наличия канала (средства) связи между излучающей и приемными позициями. В частности, в обеспечение когерентной временной обработки принимаемых сигналов, приемным позициям должна быть известна форма зондирующего сигнала. Для решения задачи измерения координат (точнее, дальномерной линии положения) приемным позициям должен быть известен момент начала излучения зондирующего сигнала, а в общем случае и местоположение излучающей позиции. Совокупность указанных данных далее называем режимной информацией (т.е. информацией, характеризующей режим обзора).
В терминах описания объекта по патенту РФ №2364888 (который ниже выбран в качестве прототипа) под синхронизирующей понимается информация, которая позволяет точно установить момент излучения гидроакустического зондирующего сигнала и рассчитать расстояние между объектами, от которых отразился эхосигнал, и приемными позициями. Мы понимаем задачу синхронизации функций излучения и приема в бистатическом гидролокаторе шире, а именно как задачу передачи из излучающей в приемные позиции и декодирования в этих приемных позициях всей указанной режимной информации, т.е. не только о моменте излучения, но и форме зондирующего сигнала.
Известен объект «Мультистатическая акустическая система и система контроля положения подводных аппаратов» по патенту РФ №2364888, в котором проблема наличия указанного выше канала связи решается путем излучения излучающей позицией перед зондирующим сигналом режимной информации. Кроме того, в указанном объекте реализуется также прием и декодирование этой информации в приемных позициях. Данный объект содержит излучающую позицию (в терминологии описания прототипа - излучающую базу), имеющую средства излучения гидроакустических импульсов, в данном случае являющихся зондирующими сигналами, и средства передачи режимной информации приемным позициям, а также приемные позиции (в терминологии описания прототипа - приемные базы), имеющие каждая средства для приема и обработки режимной информации и эхосигналов, и служащие для обработки принимаемых эхосигналов таким образом, чтобы определить положения морских объектов. В указанном объекте реализуется, в частности, синхронизация функций излучения и приема в бистатическом гидролокаторе. В этой части указанный объект является прототипом. Описание прототипа в терминах реализуемого в нем способа синхронизации функций излучения и приема выглядит следующим образом. В нем реализуются операции излучения аддитивной смеси гидроакустических (т.е. зондирующих) импульсов и режимной информации в виде информационных импульсов, а также приема информационных импульсов и их декодирования для восстановления режимной информации, чем обеспечивается необходимая настройка приемника гидролокатора (т.е. синхронизация).
Недостатки прототипа:
- при ограниченном общем времени излучения имеет место потеря части энергии зондирующего сигнала вследствие необходимости расходования части времени излучения на режимную информацию, что ведет к снижению дальности действия гидролокатора;
- при его реализации имеется возможность использования в качестве излучающей только такую позицию, которая оборудована средствами передачи режимной (синхронизирующей) информации, что существенно сужает возможности оперативной реализации бистатического гидролокатора на основе разнородных гидроакустических средств.
Целью заявляемого способа является устранение указанных недостатков прототипа. Цель достигается тем, что в способе синхронизации функций излучения и приема в бистатическом гидролокаторе реализуются операции излучения зондирующего сигнала, а также декодирования принимаемой информации, кроме того реализуется операция приема зондирующего сигнала, декодирование принимаемой информации реализуется путем измерения параметров принятого зондирующего сигнала, в частности, времени его прихода, информация для определения местоположения морских объектов формируется на основе результата измерения времени прихода зондирующего сигнала, а информация для настройки приемника гидролокатора формируется путем сравнения результатов измерения параметров с содержимым базы, хранящей параметры возможных зондирующих сигналов.
Блок-схема заявляемого способа представлена на фиг.1, где обозначены:
1 - излучение зондирующего сигнала;
2 - прием зондирующего сигнала;
3 - декодирование принимаемой информации (измерение параметров принятого зондирующего сигнала);
4 - сравнение результатов измерения параметров принятого зондирующего сигнала с содержимым базы, хранящей параметры возможных зондирующих сигналов.
Операция излучения зондирующего сигнала 1 реализуется аналогично соответствующей операции прототипа, а именно с помощью излучающей базы (позиции), состоящей в заявляемом объекте в простейшем случае из совокупность соединенных последовательно:
- задающего генератора, представляющего собой спецпроцессор, вычисляющий временные отсчеты зондирующего сигнала и преобразующий их цифроаналоговым преобразователем (см. например, Применение цифровой обработки сигналов. Под ред. Э. Оппенгейма. М.: Мир. 1980, рис.5.36, с.331);
- усилителя мощности (см. например, А.П. Евтютов и др. Справочник по гидроакустике. Л.: Судостроение. 1982, с.271);
- гидроакустический (излучающий) преобразователь (см. например, цитированный справочник А.П. Евтютова и др., глава 5), реализующий преобразование электрической энергии в акустическую.
В общем случае операция излучения реализуется, например, согласно справочнику М.Д. Смарышева, Ю.Ю. Добровольского. Гидроакустические антенны. Л.: Судостроение. 1984, с.9, рис.1.3 и 1.5а.
Операция приема зондирующего сигнала 2 в простейшем случае предусматривает преобразование акустических сигналов в электрические многоэлементной приемной гидроакустической антенной и суммирование сигналов от гидрофонов антенны. В случае необходимости фокусировки антенны на направление, отклоняющееся от нормали к ее базе, суммирование сигналов от гидрофонов осуществляется с задержками (см. например, цитированный справочник М.Д. Смарышеа и Ю.Ю. Добровольского, с.10, рис.1.4).
Операция декодирования принимаемой информации 3 реализуется путем измерения параметров принятого зондирующего сигнала. Возможны, в частности, сочетания следующих измеряемых параметров принимаемого зондирующего сигнала:
- частота;
- длительность;
- время прихода;
- направление прихода.
Указанные параметры измеряются следующим образом. При работе с тональными зондирующими сигналами частота измеряется посредством реализации гребенки согласованных фильтров, настроенных на разные альтернативы частоты (функцию этой гребенки, например, при тональных сигналах играет процедура дискретного преобразования Фурье или спектрального анализа), выход каждого фильтра гребенки через детектор подключен ко входу решающего устройства, например, определяющего номер канала фильтрации, в котором отклик на сигнал имеет максимальную амплитуду (см. например, Я.Д. Ширман, В.Н. Манжос. Теория и техника обработки радиолокационной информации на фоне помех. М.: Радио и связь. 1981. с.204 и 205, рис.14.2). При работе с широкополосными (сложными) зондирующими сигналами в простейшем случае под частотой понимается его средняя частота, которая может быть измерена аналогично частоте тонального сигнала; при этом, как указано выше, реализуется гребенка фильтров, согласованных с альтернативами частот сложных сигналов.
Время прихода зондирующего сигнала измеряется фактически так же, как и частота, т.е. посредством тех же операций фильтрации и детектирования (см. например, цитированную книгу Я.Д. Ширмана и В.Н. Манжоса, с.203, 204, рис.14.1.) Отличие состоит лишь в том, что решающее устройство (оно на упомянутом рис.14.1. не показано, но подразумевается) определяет номер альтернативы времени, в которой отклик на сигнал максимален.
Длительность зондирующего сигнала может измеряться совместно со временем его прихода. При этом фиксируются результаты измерения времен (моментов) прихода переднего и заднего фронтов этого сигнала, после чего длительность сигнала определяется как разность этих времен. Для измерения указанных моментов сигнал с выхода цепочки «фильтр-детектор» поступает на пороговое устройство. Моментом прихода переднего фронта сигнала является момент начала превышения сигналом на входе порогового устройства порога, а заднего фронта - момент прекращения этого превышения.
Направление прихода зондирующего сигнала определяется посредством его моноимпульсного (например, фазового) пеленгования (см. например, цитированную книгу Я.Д. Ширмана и В.Н. Манжоса. с.216 и 217, рис.14.16). В обеспечение возможности реализации последней операции в варианте фазового моноимпульсного пеленгования операция приема 2 реализуется с использованием деления приемной антенны на две части и раздельного суммирования сигналов от гидрофонов в пределах каждой половины этой антенны. В итоге формируются два суммарных сигнала, подаваемых на входы моноимпульсного пеленгатора, показанного на рис.14.16 цитированной книги Я.Д. Ширмана и В.Н. Манжоса).
Операция сравнения результатов измерения параметров принятого зондирующего сигнала с содержимым базы, хранящей параметры возможных зондирующих сигналов 4 реализуется следующим образом. Занесенными в базу и сравниваемыми параметрами являются частота (в случае сложного зондирующего сигнала - средняя частота) и длительность принятого зондирующего сигнала. В случае измерения только частоты/длительности из базы данных выбирается сигнал с частотой/длительностью, совпадающей с измеренной. Выбор этого сигнала создает эффект, эквивалентный передаче в прототипе от излучающей в приемные позиции данных об излученном сигнале. Этот выбор определяет настройки тракта обработки в соответствующей приемной позиции (операция настроек выходит за рамки заявляемого объекта). В случае измерения и частоты, и длительности принятого сигнала осуществляется выбор сигнала из базы данных с совпадающими обоими параметрами. Все решения о совпадении сравниваемых измеренных и хранящихся в базе параметров осуществляются в том случае, если сравниваемые параметры совпадают в пределах соответствующих стробов. Размеры этих стробов могут составлять единицы процентов.
Результат измерения времени прихода прямого сигнала может быть использован в одном из следующих двух вариантов.
Первый вариант. При известных заранее координатах излучающей позиции (координаты же каждой приемной позиции в этой позиции заведомо известны) заданы и расстояния Ri между каждой i-й из приемных позиций и этой излучающей позицией. Тогда по измеренному моменту прихода зондирующего сигнала может быть вычислен момент его излучения (последний отстает от момента прихода зондирующего сигнала на интервал времени Ri ·C, где C - скорость звука). Указанная операция расчета момента излучения при перечислении признаков заявляемого объекта опущена в связи с ее тривиальностью.
Второй вариант. При неизвестных заранее координатах излучающей позиции направление на нее из каждой конкретной приемной позиции задает результат измерения в этой позиции направления прихода зондирующего сигнала. Дистанцию же до излучающей позиции Ri при этом определяют следующим образом. Излучающая и приемные позиции в этой ситуации работают в системе единого времени. По принятой заранее договоренности излучение (имеется в виду, например, излучение переднего фронта сигнала) производится в возможные фиксированные моменты времени. Например, в каждую первую секунду каждой, например, 5-й минуты каждого часа. Это не означает обязательства излучения именно в каждый из оговоренных моментов; имеется в виду, что излучение может производиться в один или несколько из оговоренных моментов. Конкретно такой закон излучения не приводит к неоднозначности определения момента излучения при заранее известном предельном расстоянии Ri, составляющем (при периоде излучения именно в 300 секунд, т.е. в каждую 5-ю минуту часа) не более 450 км. При этом момент излучения становится известным, известно также время распространения сигнала от излучающей до приемной позиции (как разность между моментами излучения и прихода зондирующего сигнала); дистанция Ri до излучающей позиции вычисляет как произведение указанного времени распространения на скорость распространения звука. Указанные операции расчетов времени распространения и дистанции Ri при перечислении признаков заявляемого объекта опущены в связи с ее тривиальностью.
Работа заявляемого объекта в динамике фактически описана при пояснениях содержания его признаков и их реализации. В заявляемом объекте выходными данными, необходимыми для синхронизации функций излучения и приема в бистатическом гидролокаторе, являются параметры зондирующего сигнала и момент излучения (при известных координатах излучающей позиции) или координаты излучающей позиции при работе позиций гидролокатора в системе единого времени. Именно эта информация и является режимной в прототипе. Указанная информация в заявляемом объекте из излучающей позиции в приемные позиции передана, и при этом указанные выше недостатки прототипа в заявляемом объекте отсутствуют.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ осуществления гидроакустической связи с быстроходным подводным объектом | 2020 |
|
RU2733489C1 |
| Бистатический способ обнаружения подводной цели и бистатический гидролокатор | 2018 |
|
RU2694795C1 |
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2019 |
|
RU2715409C1 |
| МУЛЬТИСТАТИЧЕСКАЯ АКУСТИЧЕСКАЯ СИСТЕМА И СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВОДНЫХ АППАРАТОВ | 2004 |
|
RU2364888C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПЕРЕМЕЩЕНИЯ ИСТОЧНИКА ЗОНДИРУЮЩИХ СИГНАЛОВ | 2012 |
|
RU2496117C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи при бистатической гидролокации | 2019 |
|
RU2736567C1 |
| СПОСОБ ИЗМЕРЕНИЯ ИЗМЕНЕНИЯ КУРСОВОГО УГЛА ДВИЖЕНИЯ ИСТОЧНИКА ЗОНДИРУЮЩИХ СИГНАЛОВ | 2013 |
|
RU2545068C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ЗВУКА | 2015 |
|
RU2581416C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА | 2012 |
|
RU2501038C1 |
| СПОСОБ ПОЛУАКТИВНО-ПАССИВНОГО БИСТАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЦЕЛИ | 2020 |
|
RU2751999C1 |
Заявляемый объект относится к технике бистатической гидролокации (или способам бистатической гидролокации), в которой связь между разнесенными в пространстве излучающей и приемной позициями (или несколькими приемными позициями) осуществляют по гидроакустическому каналу. Целью заявляемого способа является преодоление следующих недостатков прототипа: при ограниченном общем времени излучения имеет место потеря части энергии зондирующего сигнала вследствие необходимости расходования части времени излучения на режимную (синхронизирующую) информацию, что ведет к снижению дальности действия гидролокатора; при его реализации имеется возможность использования в качестве излучающей только такую позицию, которая оборудована средствами передачи режимной (синхронизирующей) информации, что существенно сужает возможности оперативной реализации бистатического гидролокатора на основе разнородных гидроакустических средств. Заявляемый способ синхронизации функций излучения и приема в бистатическом гидролокаторе предусматривает реализацию операций излучения и приема зондирующего сигнала, декодирование принимаемой информации реализуется путем измерения параметров принятого зондирующего сигнала, в частности времени его прихода, информация для определения местоположения морских объектов формируется на основе результата измерения времени прихода зондирующего сигнала, а информация для настройки приемника гидролокатора формируется путем сравнения результатов измерения параметров с содержимым базы, хранящей параметры возможных зондирующих сигналов. Положительный эффект (см. указанную выше цель изобретения) достигается за счет отказа от передачи и обработки сигналов, несущих режимную информацию, и извлечения указанной информации непосредственно из принимаемого приемными позициями зондирующего сигнала.3 з.п. ф-лы, 1 ил.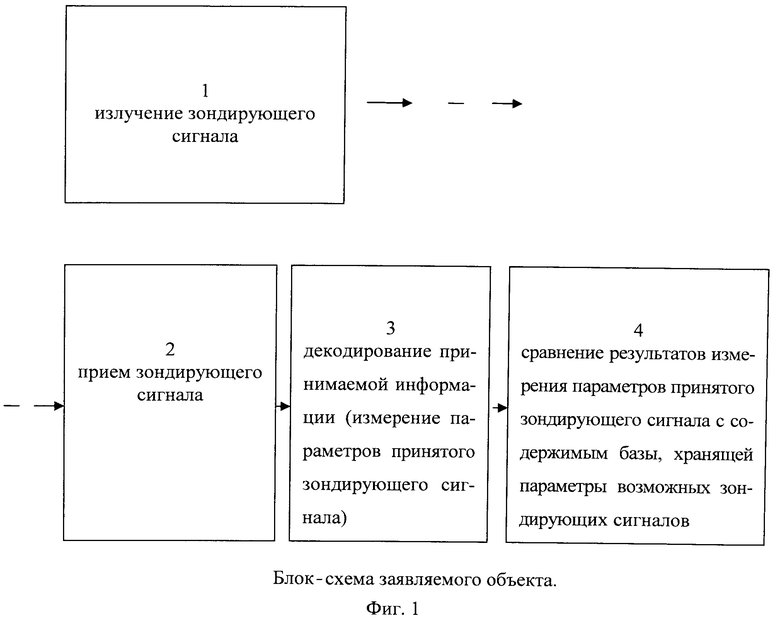
1. Способ синхронизации функций излучения и приема в бистатическом гидролокаторе, предусматривающий операции излучения зондирующего сигнала, а также декодирования принимаемой информации, отличающийся тем, что реализуется операция приема зондирующего сигнала, операция декодирования принимаемой информации реализуется путем измерения параметров принятого зондирующего сигнала, в частности времени его прихода, информация для определения местоположения морских объектов формируется на основе результата измерения времени прихода зондирующего сигнала, а информация для настройки приемника гидролокатора формируется путем сравнения результатов измерения параметров с содержимым базы, хранящей параметры возможных зондирующих сигналов.
2. Способ по п.1, отличающийся тем, что измеряемыми параметрами зондирующего сигнала являются его частота и время прихода.
3. Способ по п.1, отличающийся тем, что измеряемыми параметрами зондирующего сигнала являются его длительность и время прихода.
4. Способ по п.1, отличающийся тем, что измеряемыми параметрами зондирующего сигнала являются частота, направление и время его прихода.
| СИСТЕМА АКТИВНОЙ ГИДРОЛОКАЦИИ ГИДРОАКУСТИЧЕСКОЙ СТАНЦИИ | 2009 |
|
RU2393503C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2010 |
|
RU2452978C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА | 2011 |
|
RU2456635C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ ОБНАРУЖИТЕЛЬ ДВИЖУЩЕГОСЯ ПОДВОДНОГО ОБЪЕКТА | 2011 |
|
RU2474881C1 |
| Способ классификации эхосигналов для систем охранной сигнализации водного района | 1991 |
|
SU1838803A3 |
| Гидроакустическая станция для определения местоположения маяка-ответчика | 1990 |
|
SU1803895A1 |
| ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ИСТОЧНИКА ЗВУКА В МЕЛКОМ МОРЕ | 2011 |
|
RU2484492C1 |

