Изобретение относится к области гидроакустики, в частности гидролокации, и может быть использовано при построении систем обнаружения подводных целей, например, подводных лодок (ПЛ) или автономных подводных аппаратов (АПА).
В теории поиска известен способ поиска объекта, содержащий излучение в рабочую среду - воздух в радиолокации и воду в гидроакустике - сигнала и прием отраженного от объекта поиска сигнала.
Известен моностатический способ обнаружения подводной цели, содержащий излучение в воду гидроакустического сигнала и прием эхосигнала, отраженного от подводного объекта, при этом излучение и прием сигналов производится соответственно излучателем и приемником, входящими в состав одной и той же гидроакустической станции (ГАС) [1].
Эффективность (производительность) поиска целей (площадь, обследуемая в единицу времени) для случая неуклоняющейся цели определяется следующим выражением [2]:
где W - производительность поиска;
Шпп - ширина полосы поиска (представляет собой удвоенную дальность обнаружения в траверзных направлениях или так называемую «боковую» дальность [3]);
V - относительная скорость хода носителя;
Pk - вероятность установления контакта с целью при попадании ее в зону наблюдения.
В качестве Pk обычно используется вероятность правильного обнаружения цели - Рпо при заданной вероятности ложных тревог - Рлт.
Вероятность правильного обнаружения определяется из так называемых рабочих характеристик обнаружения [4], устанавливающих связь между Рпo, Рлт, коэффициентом флуктуаций сигнала, отношением сигнал-помеха на входе антенны и порогом обнаружения.
В случае моностатического режима зона обнаружения цели приблизительно является круговой, при этом дальность действия во всех направлениях является одинаковой.
Тогда, ширина полосы поиска равна:

где R0 - дальность действия в моностатическом режиме
Недостатком известного способа является то, что в ряде гидроакустических условий не обеспечивается требуемая ширина полосы поиска.
Известен мультистатический способ обнаружения подводной цели, содержащий излучение антенной по меньшей мере одной подсистемы в воду гидроакустических сигналов частоты f1 и передачу с помощью модулированного акустического информационного импульса режимной информации, и прием антенной другой подсистемы гидроакустических сигналов, разделение эхо-сигналов и информационных импульсов, обработку эхосигналов частоты f1, демодуляцию и восстановление режимной информации. При этом возможно размещение излучающей и приемной подсистем ГАС на различных объектах - носителях [5].
Частным случаем данного способа является бистатический способ обнаружения подводной цели, при котором используется только одна излучающая и одна приемная подсистемы. Данный способ реализуется в устройстве, называемом бистатическим гидролокатором (БГ), в котором излучающая и приемная антенны разнесены в пространстве [6].
Зона обнаружения в режиме бистатической гидролокации представляет собой овал Кассини [7], приближающийся по форме к эллипсу (при разнесении источника излучения и приемника излучения на дистанцию, соизмеримую с дальностью действия в моностатическом режиме), при этом дальность действия в траверзном («боковом») направлении составляет Roб.
При аналогичных гидроакустических характеристиках цели, среды, помех и технических параметрах моностатического и бистатического гидролокаторов ширина полосы поиска в бистатическом режиме (при оптимальном разнесении источника излучения и приемника) больше и составляет величину:

Таким образом, применение известного бистатического способа обнаружения подводной цели позволяет увеличить ширину полосы поиска, так как R0б>R0.
Последнее объясняется тем, что длина большой полуоси эллипса (в нашем случае Rоб) больше, чем координаты фокусов эллипса (излучателя и приемника), которые больше, чем Ro/2 [8].
Известное устройство - бистатический гидролокатор (БГ), реализующее бистатический способ, и описанное в [5], содержит излучающую базу первой подсистемы, которая содержит управляющее устройство; устройство кодирования, шифрования и модуляции, вход которого соединен с первым выходом управляющего устройства; сумматор, первый вход которого соединен с выходом устройства кодирования, шифрования и модуляции, а второй - со вторым выходом управляющего устройства; излучающее устройство (генератор), вход которого соединен с выходом сумматора, излучающую антенну БГ (излучающая база БГ), вход которой соединен с выходом излучающего устройства. БГ также содержит приемную базу второй подсистемы, которая включает приемную антенну БГ; селектор (разделитель сигналов), вход которого соединен с выходом приемной антенны; демодулятор, устройства кодирования и шифрования, вход которого соединен с первым выходом селектора; приемное устройство БГ, первый вход которого соединен со вторым выходом селектора, а второй вход - с выходом демодулятора, устройства кодирования и шифрования, устройство обработки информации БГ (приемная база БГ), вход которого соединен с выходом приемного устройства.
Способ бистатической гидролокации, осуществляемый описанным устройством заключается в следующем: излучающая база БГ генерирует в воду составной сигнал, образованный двумя импульсами с различной структурой: гидроакустический или зондирующий сигнал на рабочей частоте f1, предназначенный для обнаружения объекта поиска, и информационный сигнал в полосе частот f1±Δf1, предназначенный для передачи в воду режимной информации, а именно синхронизирующего импульса и контекстной информации. Режимная информация обеспечивает данными приемную базу БГ, например, о координатах и параметрах движения носителя, режимах работы излучающей базы и моментах излучения синхронизирующего импульса. Это позволяет работать излучающей и приемной базам в единой системе времени и координат, с идентичными частотно-временными параметрами.
Гидроакустический и информационный импульсы модулируются различным образом и передаются в морскую среду с заранее известным интервалом времени Δt.
Приемное устройство (приемная база) обеспечивает выделение составного сигнала из помех. Устройство обработки информации предназначено для обнаружение и определение координат и параметров движения объекта (выработки формулярной информации - ФИ).
Описанный выше способ и устройство, его реализующее, наиболее близки к предлагаемому изобретению по технической сущности и количеству общих признаков.
Однако, как в моностатической, так и бистатической ГАС вероятность установления контакта и зона обнаружения цели ограничиваются не только энергетическими параметрами акустического излучения и шумами приемника, но и влиянием среды - аномалией распространения, затуханием звука, реверберационной помехой, отражениями от дна и поверхности моря и т.д., в результате чего образуются так называемые зоны акустической тени, зоны конвергенции [9] и другие специфические гидроакустические явления. В мелководных районах даже на небольших расстояниях имеет место многолучевое распространение звука. Это приводит к наличию больших флуктуаций сигнала, достигающих размаха 10-20 и более дБ на дистанциях порядка единиц км [10].
Указанные факторы обусловливают существенную изменчивость уровня и параметров эхо-сигнала, что приводит к неравномерности характеристик обнаружения цели по дистанции в пределах зоны обнаружения, что, в частности, в сложных гидроакустических условиях мелкого моря понижает площадь зоны обнаружения с Рк, равной не менее 0,9. Это приведет к снижению эффективности ГАС (величины W).
Таким образом, недостатком известного способа и устройства, его реализующего, использующего работу ГАС на одной частоте, является то, что в сложных гидроакустических условиях мала площадь зоны уверенного обнаружения цели.
Задачей изобретения является обеспечение технического результата, заключающегося в увеличении площади зоны обнаружения, в пределах которой обеспечивается требуемая вероятность обнаружения.
Технический результат заключается в обеспечении независимости работы излучающей и приемной базы в единой системе времени и координат с идентичными частотно-временными параметрами от условий распространения сигнала в водной среде, что позволяет увеличить площадь зоны обнаружения.
Для решения поставленной задачи в известный бистатический способ обнаружения подводной цели, содержащий излучение в воду первой подсистемой БГ составного гидроакустического сигнала, включающего зондирующий сигнал частоты f1 и информационный сигнал, состоящий из синхронизирующего импульса и контексной информации в полосе частот f1±Δf1, прием второй подсистемой БГ эхо-сигнала от цели и прямого информационного сигнала, селекцию этих сигналов, демодуляцию и восстановление режимной информации, обработку эхо-сигнала и обнаружение подводной цели введены новые операции, а именно второй подсистемой БГ излучают в воду составной гидроакустический сигнал, включающий зондирующий сигнал частоты f2 и информационный сигнал в полосе частот f2±Δf2, состоящий из синхронизирующего импульса и контекстной информации, причем в состав ее входят результаты обнаружения цели на частоте f1, принимают первой подсистемой БГ эхо-сигнал от цели частоты f2 и прямой информационный сигнал в полосе частот f2±Δf2, селекцию этих сигналов, демодуляцию и восстановление режимной информации, обработку эхо-сигнала частоты f2 и обнаружение цели, а окончательное решение об обнаружении подводной цели производят в первой подсистеме по результатам обнаружения цели первой и второй подсистемами обработки эхо-сигналов частот f1 и f2
Поставленная задача решается с помощью устройства - бистатического гидролокатора, содержащего излучающую базу первой подсистемы, которая содержит первое управляющее устройство; первое устройство кодирования, шифрования и модуляции, вход которого соединен с первым выходом первого управляющего устройства; первый сумматор, первый вход которого соединен с выходом первого устройства кодирования, шифрования и модуляции, а второй - со вторым выходом первого управляющего устройства; первый излучающий генератор, выполненный с возможностью формирования составного сигнала, включающий гидроакустический сигнал частоты f1 и информационный импульс, содержащий режимную информацию: синхронизирующий импульс и контекстную информацию в полосе частот f1±Δf1, вход которого соединен с выходом первого сумматора, первую излучающую антенну БГ, вход которой соединен с выходом первого излучающего генератора, и приемную базу второй подсистемы, которая содержит первую приемную антенну БГ; первый селектор, вход которого соединен с выходом первой приемной антенны; первый демодулятор с устройством кодирования и шифрования, вход которого соединен с первым выходом первого селектора; первое приемное устройство БГ, первый вход которого соединен со вторым выходом первого селектора, а второй вход - с выходом первого демодулятора с устройством кодирования и шифрования, первое устройство обработки информации БГ, вход которого соединен с выходом первого приемного устройства, в который введены новые признаки, а именно: он содержит также излучающую базу второй подсистемы, которая содержит второе управляющее устройство; второе устройство кодирования, шифрования и модуляции, вход которого соединен с первым выходом второго управляющего устройства; второй сумматор, первый вход которого соединен с выходом второго устройства кодирования, шифрования и модуляции, а второй - со вторым выходом второго управляющего устройства; второй излучающий генератор, выполненный с возможностью формирования составного сигнала, включающий гидроакустический сигнал частоты f2 и информационный импульс, содержащий режимную информацию: синхронизирующий импульс и контекстную информацию в полосе частот f2±Δf2, вход которого соединен с выходом второго сумматора, вторую излучающую антенну БГ, вход которой соединен с выходом второго излучающего генератора и приемную базу первой подсистемы, которая содержит вторую приемную антенну БГ; второй селектор, вход которого соединен с выходом второй приемной антенны; второй демодулятор с устройством кодирования и шифрования, вход которого соединен с первым выходом второго селектора; второе приемное устройство БГ, первый вход которого соединен со вторым выходом второго селектора, а второй вход - с выходом второго демодулятора с устройством кодирования и шифрования, второе устройство обработки информации БГ, вход которого соединен с выходом второго приемного устройства.
Технический результат достигается за счет работы на двух частотах, что повышает вероятность контакта с целью.
Сущность предлагаемого способа поясняется фиг. 1, 2, 3 и 4, где на Фиг. 1. приведена блок-схема устройства, реализующего способ, на Фиг. 2 - в общем виде взаимное расположение носителей подсистем БГ (НК и ПЛ) и подводного объекта (ПЛ), а также направления излучения и приема двухчастотного гидролокатора и передачи режимной информации, на фиг 3 и 4 - картины зон обнаружения для одночастотного и двухчастотного БГ, соответственно.
Устройство, реализующее способ - бистатический гидролокатор (БГ) - содержит следующие блоки (Фиг 1): излучающую базу первой подсистемы 1, приемную базу первой подсистемы 2, излучающую базу второй подсистемы 3 и приемную базу второй подсистемы 4.
Излучающая база первой подсистемы 1 содержит первое управляющее устройство (УП1)5, первое устройство кодирования шифрования и модуляции (УКШМ1)6, первый сумматор (С1)7, первый излучающий генератор (ГИ1)8, первую излучающую антенну (ИА1)9. Первый вход устройства 6 соединен с первым выходом устройства 5, первый вход сумматора 7 соединен с выходом устройства 6, а второй со вторым выходом устройства 5. Сумматор 7, первый излучающий генератор 8 и первая излучающая антенна 9 последовательно соединены между собой.
Приемная база первой подсистемы 2 содержит вторую приемную антенну (ПА2)10, второй селектор (СЕЛ2)11, второй демодулятор (ДЕМ2)12, второе приемное устройство (ПУ2)13 и второе устройство обработки информации (УO2)14. Вход второго селектора 11 соединен с выходом приемной антенны 10, первый выход - со входом демодулятора 12, а второй - с первым входом приемного устройства 13, второй вход которого соединен с выходом демодулятора 12. Выход устройства 13 соединен с входом устройства обработки информации 14.
Излучающая база второй подсистемы 3 содержит второе управляющее устройство (УП2)15, второе устройство кодирования, шифрования и модуляции УКШМ2)16, второй сумматор (С2)17, второй излучающий генератор (ГИ2)18, вторую излучающую антенну (ИА2)19. Первый вход устройства кодирования 16 соединен с первым выходом блока 15, первый вход сумматора 17 соединен с выходом устройства кодирования 16, а второй - со вторым выходом управляющего устройства 15. Сумматор 17, излучающий генератор 18 и излучающая антенна 19 последовательно соединены между собой.
Приемная база второй подсистемы 4 содержит первую приемную (ПА1) 20, первый селектор (СЕЛ1) 21, первый демодулятор (ДЕМ1)22, первое приемное устройство (ПУ1)23 и первое устройство обработки информации (УO1)24. Вход селектора 21 соединен с выходом приемной антенны 20, первый выход - со входом демодулятора 22, а второй - с первым входом приемного устройства 23, второй вход которого соединен с выходом демодулятора 22. Выход устройства 23 соединен с входом устройства обработки информации 24.
Все блоки являются типовыми, хорошо известны и широко применяются в гидроакустике.
Описание предлагаемого способа целесообразно совместить с описанием работы реализующего его устройства.
Одна из подсистем (гидроакустических станций) БГ назначается ведущей. В рассматриваемом устройстве ведущей является первая подсистема. Вторая подсистема назначается ведомой (в нашем случае, это-вторая подсистема). В случае, если оба носителя являются НК, то выбор ведущей ГАС не принципиален. Если одним носителем является НК, а другим погруженный объект (ПЛ, радиогидроакустический буй или подводный робот), то ведущей ГАС назначается подсистема БГ, размещенная на надводном корабле (Фиг. 2).
Устройство, реализующее способ - бистатический гидролокатор (БГ) - работает следующим образом (Фиг. 1).
Входящее в состав излучающей базы первой подсистемы 1 устройство 5 управления подает зондирующий сигнал частоты f1 (ГИ) на сумматор 7, а синхронизирующий импульс (СИ) и контекстную информацию (КИ) на вход устройства 6 кодирования, шифрования и модуляции, с выхода которого информационный сигнал (ИИ), состоящий из синхронизирующего импульса и контекстной информации в полосе частот f1±Δf1 подается на второй вход сумматора 7.
В сумматоре 7 происходит преобразование зондирующего сигнала и информационного сигнала в составной гидроакустический сигнал (И), включающий в себя зондирующий сигнал частоты f1 и информационный сигнал в полосе частот f1±Δf1. С выхода сумматора 7 составной гидроакустический сигнал поступает на вход излучающего генератора 8, в котором происходит его усиление, и при помощи излучающей антенны 9 излучается в воду.
Эхо-сигнал от цели частоты f1 и прямой информационный сигнал в полосе частот f1±Δf1 принимается входящей в состав приемной базы второй подсистемы 4 приемной антенной 20 и направляется на селектор (разделитель сигналов) 21, в котором происходит селекция эхо-сигнала от цели (ГИ) и информационного импульса (ИИ). Эхо-сигнал от цели с первого выхода селектора поступает на первый вход приемного устройства 23, а информационный импульс - со второго выхода селектора 21 на вход демодулятора с устройством кодирования и шифрования 22. В последнем происходит демодуляция и восстановление режимной информации, которая поступает на второй вход приемного устройства 23. С выхода приемного устройства 23 эхо-сигнал и режимная информация поступают на вход устройства 24 обработки информации второй подсистемы, в которой производится обработка эхо-сигнала и принимается решение об обнаружении цели.
Далее при помощи входящего в состав излучающей базы второй подсистемы 3 устройства управления 15 с его первого выхода подают на первый вход сумматора 17 зондирующий сигнал частоты f2 (ГИ), а с второго выхода соответственно на первый вход устройства 16 кодирования, шифрования и модуляции синхронизирующий импульс (СИ) и контекстную информацию (КИ). С выхода устройства 16 на второй вход сумматора 17 подается информационный сигнал (ИИ), состоящий из синхронизирующего импульса и контекстной информации в полосе частот f1±Δf1, причем, в ее состав входят результаты обнаружения цели на частоте f1.
В сумматоре 17 происходит преобразование зондирующего сигнала и информационного сигнала в составной гидроакустический сигнал (И), включающий в себя зондирующий сигнал частоты f2 и информационный сигнал в полосе частот f2±Δf2 С выхода сумматора 17 составной гидроакустический сигнал поступает на вход излучающего генератора 18, в котором происходит его усиление, и при помощи излучающей антенны 19 излучается в воду.
Эхо-сигнал от цели частоты f2 и прямой информационный сигнал в полосе частот f2±Δf2 принимают входящей в состав приемной базы первой подсистемы 2 приемной антенной 10 и направляют на селектор (разделитель сигналов)11, в котором происходит селекция эхо-сигнала от цели (ГИ) и информационного импульса (ИИ). Эхо-сигнал от цели с первого выхода селектора 11 поступает на первый вход приемного устройства 13, а информационный импульс - со второго выхода селектора 11 на вход демодулятора с устройством кодирования и шифрования 12. В последнем происходит демодуляция и восстановление режимной информации, которая поступает на второй вход приемного устройства 13. С выхода приемного устройства 13 эхо-сигнал и режимная информация поступают на вход устройства обработки информации первой подсистемы 14, в которой производится обработка эхо-сигнала и принимается решение об обнаружении цели.
Ведущая подсистема БГ обеспечивает синхронизацию работы и совместную обработку информации (на основе режимной информации) обеих подсистем. Очередной цикл локации (излучение, прием и обработка гидроакустического сигнала) ведомой ГАС начинается после получения информационного импульса от ведущей подсистемы. После завершения цикла локации ведомая подсистема излучает составной сигнал и в составе режимной информации передает формулярную информацию (предварительное решение об обнаружении цели, ее координаты и параметры движения). Процедура совместной обработки информации в первой подсистеме БГ (обнаружение «1 из 2») описана выше.
Частоты f1и f2 выбираются с учетом обеспечения гидроакустической совместимости, т.е. их разнос должен исключать взаимные помехи, обусловленные излучаемыми подсистемами ГАС сигналами. Информационные импульсы являются широкополосными для повышения скрытности и помехоустойчивости передаваемой режимной информации.
Совместная обработка гидроакустических сигналов частот f1, f2 выполняется следующим образом.
В каждой подсистеме осуществляется когерентная или некогерентная (в зависимости от характера флуктуаций эхо-сигналов обработка и принимается предварительное решение об обнаружении (формируется единица) или не обнаружении цели (формируется нуль) в текущем цикле локации. От подсистем в блок управления и совместной обработки первой подсистемы БГ передаются соответствующие сообщения (режимная информация), на основе анализа которых принимается окончательное решение об обнаружении объекта.
В основе процедур совместной обработки информации могут быть использованы известные в радиолокации и гидроакустике процедуры, например, правило «k из m» [11], где k - число подсистем, в которых произошло превышение порога обнаружения, m - общее число подсистем мультистатической ГАС.
В рассматриваемом случае k=1 и m=2, т.е. используется правило «1 из 2» (обнаружение цели хотя бы одной из 2-х подсистем). Т.е., вероятность контакта определяется суммой вероятностей события «обнаружение эхо-сигнала подсистемы бистатической ГАС, работающей на эталоне f1, или подсистемой, работающей на эталоне f2, или обеими подсистемами».
Совместная обработка эхо-сигналов на частотах f1 и f2 может осуществляться в блоке, размещаемом в составе одной из подсистем БГ, на иных носителях или на берегу.
Вероятность контакта с целью при совместной работе бистатического гидролокатора на разных эталонах частот (при условии независимости эхо-сигналов), определяется по формуле:

где РK1 - вероятность контакта с целью при работе на частоте f1;
РК2 - вероятность контакта с целью при работе на частоте f2.
Несложно заметить, что даже при РK1=РК2=0,7 имеем результат:
PK=0,91.
Технический результат подтверждается расчетным моделированием по методике работы [12].
На Фиг. 3 и Фиг. 4 показаны соответственно зоны обнаружения одночастотного и двухчастотного БГ, работающего одновременно на двух эталонах частот. По осям абсцисс и координат отложены дистанции в км. «Боковая» дальность и конфигурация зон обнаружения на эталонах f1 и f2 - близки, ввиду небольшого разноса указанных эталонов, что характерно для однотипных гидролокаторов.
Сравнение Фиг .3 и Фиг. 4 показывает, что площадь зоны обнаружения, в пределах которой вероятность контакта с целью не менее 0,9, для 2-частотного бистатического гидролокатора больше, чем по сравнению с одночастотным БГ, приблизительно на 30%. Таким образом, попадание цели в эллиптическую зону обнаружения двух-частотного БГ в рассматриваемом примере приводит практически к достоверному установлению с ней контакта. Приведенное рассмотрение позволяет считать, что заявленный технический результат достигнут.
Источники информации
1. Хортон Дж. Уоррен. Основы гидролокации. Л.: СудпромГиз, 1961. - С. 405-417.
2. Абчук В.А., Суздаль В.Г. Поиск объектов. М.: Советское радио, 1977 - С. 183-205.
3. Морз Ф.М., Кимбелл Дж.Е. Методы исследования операций. М.: Советское радио, 1956. - С. 180-195.
4. Урик Роберт Дж. Основы гидроакустики. Л.: Судостроение, 1978. - С. 398-405.
5. Патент РФ на изобретение №2364888 / Боду Жан Пьер, МПК G01S 15/87.
6. Терминологический словарь-справочник по гидроакустике / Р.Х. Бальян, Э.В. Батаногов, А.В. Богородский и др. - Л.: Судостроение, 1989. - С.32.
7. Бундин Г.Г., Мясников В.В. Оценка дальности действия низкочастотных моностатического и бистатического гидролокаторов // Вопросы радиоэлектроники (серия радиолокационная техника), вып. 1, М: 2012. - С. 108-116.
8. Корн Г, Корн Т Справочник по математике для научных работников и инженеров. М: Наука, 1970 г., с. 66-69
9. Урик Роберт Дж. Основы гидроакустики. Л.: Судостроение, 1978. - С. 181-185.
10. Урик Роберт Дж. Основы гидроакустики. Л.: Судостроение, 1978. - С. 204.
10. Евтютов А.П., Митько В.Б. Инженерные расчеты в гидроакустике. - Л.: Судостроение, 1988. - С. 214-218.
11. Козловский С.В., Сергеев В.А. Методика оценки информационной эффективности мультистатических систем гидролокации / Экология и развитие общества, МАНЭБ, №3 (18), 2016. - С. 29-36.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СИНХРОНИЗАЦИИ ФУНКЦИЙ ИЗЛУЧЕНИЯ И ПРИЕМА В БИСТАТИЧЕСКОМ ГИДРОЛОКАТОРЕ | 2013 |
|
RU2535238C1 |
| ПАРАМЕТРИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР | 1996 |
|
RU2133047C1 |
| МУЛЬТИСТАТИЧЕСКАЯ АКУСТИЧЕСКАЯ СИСТЕМА И СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВОДНЫХ АППАРАТОВ | 2004 |
|
RU2364888C2 |
| Активный гидролокатор с классификацией объекта | 2021 |
|
RU2785403C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2555192C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи при бистатической гидролокации | 2019 |
|
RU2736567C1 |
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2019 |
|
RU2715409C1 |
| ГЕНЕРАТОРНЫЙ ТРАКТ ПАРАМЕТРИЧЕСКОГО ГИДРОЛОКАТОРА | 2014 |
|
RU2582898C2 |
| СПОСОБ И УСТРОЙСТВО АКТИВНОЙ ГИДРОЛОКАЦИИ | 2022 |
|
RU2795389C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
Изобретение относится к области гидроакустики, в частности гидролокации. Предложен бистатический способ обнаружения подводной цели, содержащий излучение в воду первой подсистемой бистатического гидролокатора (БГ) составного гидроакустического сигнала, включающего зондирующий сигнал частоты f1 и информационный сигнал, состоящий из синхронизирующего импульса и контекстной информации в полосе частот f1±Δf1, прием второй подсистемой БГ эхо-сигнала от цели и прямого информационного сигнала, селекцию этих сигналов, демодуляцию и восстановление режимной информации, обработку эхо-сигнала и обнаружение подводной цели, в которой второй подсистемой БГ излучают в воду составной гидроакустический сигнал, включающий зондирующий сигнал частоты f2 и информационный сигнал в полосе частот f2±Δf2, состоящий из синхронизирующего импульса и контекстной информации, причем в состав ее входят результаты обнаружения цели на частоте f1, принимают первой подсистемой БГ эхо-сигнал от цели частоты f2 и прямой информационный сигнал в полосе частот f2±Δf2, селекцию этих сигналов, демодуляцию и восстановление режимной информации, обработку эхо-сигнала частоты f2 и обнаружение цели, а окончательное решение об обнаружении подводной цели производят в первой подсистеме по результатам обнаружения цели первой и второй подсистемами обработки эхо-сигналов частот f1 и f2. Также предложен бистатический гидролокатор, реализующий этот способ. Предложенные способ и устройство позволяют увеличить площадь зоны обнаружения цели. 2 н. и 1 з.п. ф-лы, 4 ил.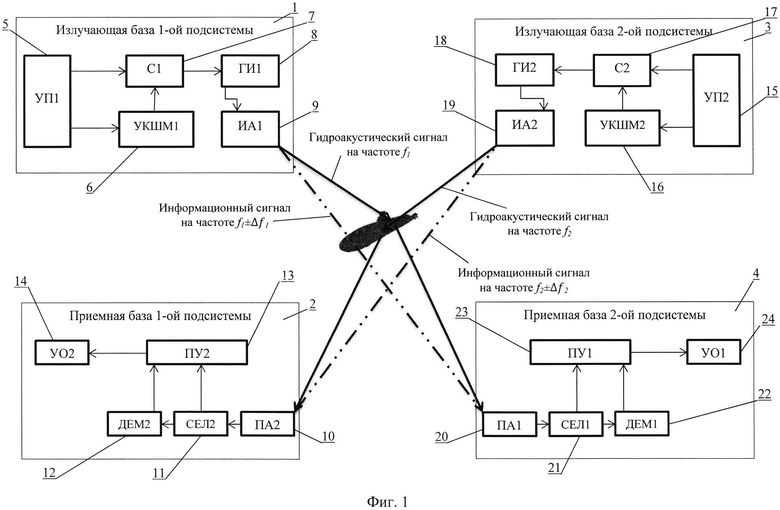
1. Бистатический способ обнаружения подводной цели, содержащий излучение в воду первой подсистемой бистатического гидролокатора (БГ) составного гидроакустического сигнала, включающего зондирующий сигнал частоты f1 и информационный сигнал, состоящий из синхронизирующего импульса и контекстной информации в полосе частот f1±Δf1, прием второй подсистемой БГ эхо-сигнала от цели и прямого информационного сигнала, селекцию этих сигналов, демодуляцию и восстановление режимной информации, обработку эхо-сигнала и обнаружение подводной цели, отличающийся тем, что второй подсистемой БГ излучают в воду составной гидроакустический сигнал, включающий зондирующий сигнал частоты f2 и информационный сигнал в полосе частот f2±Δf2, состоящий из синхронизирующего импульса и контекстной информации, причем в состав ее входят результаты обнаружения цели на частоте f1, принимают первой подсистемой БГ эхо-сигнал от цели частоты f2 и прямой информационный сигнал в полосе частот f2±Δf2, селекцию этих сигналов, демодуляцию и восстановление режимной информации, обработку эхо-сигнала частоты f2 и обнаружение цели, а окончательное решение об обнаружении подводной цели производят в первой подсистеме по результатам обнаружения цели первой и второй подсистемами обработки эхо-сигналов частот f1 и f2.
2. Способ по п. 1, отличающийся тем, что первая и вторая подсистемы бистатического гидролокатора расположены на одном носителе.
3. Бистатический гидролокатор (БГ), содержащий излучающую базу первой подсистемы, которая содержит первое управляющее устройство; первое устройство кодирования, шифрования и модуляции, вход которого соединен с первым выходом первого управляющего устройства; первый сумматор, первый вход которого соединен с выходом первого устройства кодирования, шифрования и модуляции, а второй - со вторым выходом первого управляющего устройства; первый излучающий генератор, выполненный с возможностью формирования составного сигнала, включающий гидроакустический сигнал частоты f1 и информационный импульс, содержащий режимную информацию: синхронизирующий импульс и контекстную информацию в полосе частот f1±Δf1, вход которого соединен с выходом первого сумматора, первую излучающую антенну БГ, вход которой соединен с выходом первого излучающего генератора, и приемную базу второй подсистемы, которая содержит первую приемную антенну БГ; первый селектор, вход которого соединен с выходом первой приемной антенны; первый демодулятор с устройством кодирования и шифрования, вход которого соединен с первым выходом первого селектора; первое приемное устройство БГ, первый вход которого соединен со вторым выходом первого селектора, а второй вход - с выходом первого демодулятора с устройством кодирования и шифрования, первое устройство обработки информации БГ, вход которого соединен с выходом первого приемного устройства, отличающийся тем, что он включает также излучающую базу второй подсистемы, которая содержит второе управляющее устройство; второе устройство кодирования, шифрования и модуляции, вход которого соединен с первым выходом второго управляющего устройства; второй сумматор, первый вход которого соединен с выходом второго устройства кодирования, шифрования и модуляции, а второй - со вторым выходом второго управляющего устройства; второй излучающий генератор, выполненный с возможностью формирования составного сигнала, включающий гидроакустический сигнал частоты f2 и информационный импульс, содержащий режимную информацию: синхронизирующий импульс и контекстную информацию в полосе частот f2±Δf2, вход которого соединен с выходом второго сумматора, вторую излучающую антенну БГ, вход которой соединен с выходом второго излучающего генератора, и приемную базу первой подсистемы, которая содержит вторую приемную антенну БГ; второй селектор, вход которого соединен с выходом второй приемной антенны; второй демодулятор с устройством кодирования и шифрования, вход которого соединен с первым выходом второго селектора; второе приемное устройство БГ, первый вход которого соединен со вторым выходом второго селектора, а второй вход - с выходом второго демодулятора с устройством кодирования и шифрования, второе устройство обработки информации БГ, вход которого соединен с выходом второго приемного устройства.
| СПОСОБ СИНХРОНИЗАЦИИ ФУНКЦИЙ ИЗЛУЧЕНИЯ И ПРИЕМА В БИСТАТИЧЕСКОМ ГИДРОЛОКАТОРЕ | 2013 |
|
RU2535238C1 |
| Способ получения безуглеродистого феррохрома | 1959 |
|
SU137126A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ НА МОРСКОМ РУБЕЖЕ В МЕЛКОМ МОРЕ | 1999 |
|
RU2161319C1 |
| СИСТЕМА АКТИВНОЙ ГИДРОЛОКАЦИИ ГИДРОАКУСТИЧЕСКОЙ СТАНЦИИ | 2009 |
|
RU2393503C1 |
| JP 2000088942 A, 31.03.2000 | |||
| US 7106656 B2, 12.09.2006. | |||

