Изобретение относится к способам бистатической гидролокации, в которых связь между разнесенными в пространстве приемником и передатчиком осуществляется по гидроакустическому каналу. Способ предназначен для применения в быстроходных подводных объектах (ПО) и может быть использован как для получения информации от передатчика, так и для решения задачи навигации.
К преимуществам бистатических гидролокаторов можно отнести: возможность надежной маскировки приемника, и, следовательно, снижение эффективности противодействия, так как характеристики и положение приемника неизвестны; возможность увеличения эффективной поверхности отражения цели благодаря геометрическим эффектам из-за разнесенности в пространстве передатчика и приемника.
Связной сигнал, излучаемый от передатчика к приемнику состоит из двух частей:
1. Синхронизирующий сигнал, который позволяет учесть эффект Доплера для обнаружения, детектирования и декодирования информационного сигнала.
2. Информационный сигнал, содержащий информацию о положении передатчика, времени излучения сигнала и иную информацию, позволяющую рассчитать расстояние между передатчиком и приемником.
Известен способ по патенту [1], в котором осуществляется синхронизация функций излучения и приема зондирующего сигнала бистатического гидролокатора, декодирование принимаемой информации реализуется путем измерения параметров принятого зондирующего сигнала, в частности времени его прихода, а информация для настройки приемника формируется путем сравнения результатов измерения параметров с содержимым базы, хранящей параметры возможных зондирующих сигналов.
Прототипом изобретения является «Мультистатическая акустическая система и система контроля положения подводных аппаратов» по патенту [2], в которой реализован следующий способ гидроакустической связи: сигнал, излучаемый передатчиком, состоит из опережающего импульса, который содержит информацию о рабочем режиме предложенной системы (в терминах настоящего описания - синхронизирующий сигнал), и информационного импульса (в терминах настоящего описания -информационный сигнал), разделенных временным интервалом, величина которого может меняться и указана в оперативной информации. Приемные базы используют информацию, содержащуюся в синхронизирующем сигнале для настройки приемников в зависимости от формы излучаемого импульса.
Синхронизирующий сигнал модулируется определенным образом при помощи цифрового модулирующего устройства, например, типа модема. Информационный сигнал представляет собой импульс общеизвестной формы. Например, это может быть импульс с фиксированной частотой или импульс с иной модуляцией определенного типа. Информационный сигнал отображает полный набор передаваемых данных.
Преимуществами способа гидроакустической связи, предложенного в прототипе, являются:
- работоспособность системы в режиме погружения и независимость от глубины излучающей и приемной базы (баз);
- возможность передачи информации в режиме реального времени.
Недостатком прототипа является то, что при применении в системе ненаправленной приемной антенны скомпенсировать эффект Доплера, возникающий при движении быстроходного ПО и искажающего связной сигнал, не представляется возможным.
Задачей заявляемого способа является: при сохранении преимуществ способа, предложенного в прототипе, устранение указанного недостатка за счет компенсации доплеровского сдвига связного сигнала путем его определения по принятому синхронизирующему сигналу и учета при обнаружении, детектировании и декодировании информационного сигнала. В качестве синхронизирующего сигнала применяется тональный сигнал или одна из реализаций последовательности Костаса в виде 32 элементарных тональных сигналов.
Технический результат изобретения - возможность осуществления гидроакустической связи с быстроходным ПО путем компенсации доплеровского сдвига при обнаружении, детектировании и декодировании информационного сигнала.
Краткое описание фигур.
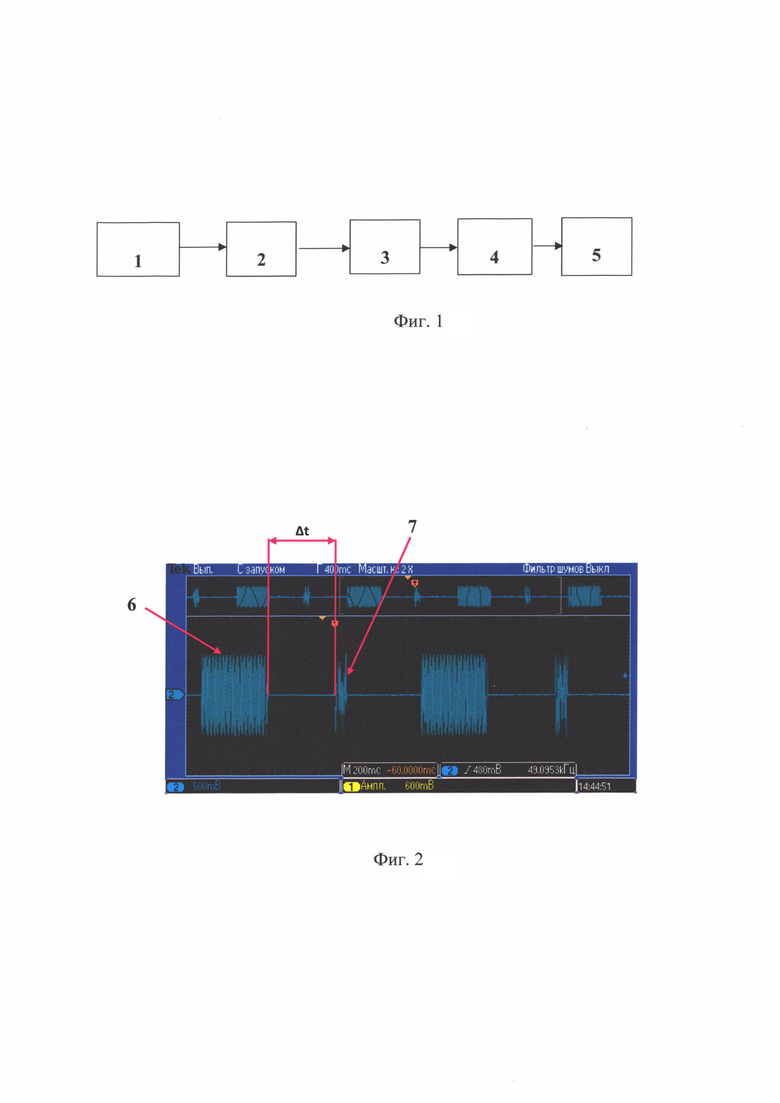
Фиг. 1. Блок-схема способа заявляемого изобретения.
На фиг.1 обозначены следующие операции:
1 - излучение связного (синхронизирующего и информационного) сигнала передатчиком;
2 - прием синхронизирующего сигнала приемником;
3 - определение доплеровского сдвига и параметров синхронизирующего сигнала приемником;
4 - прием информационного сигнала приемником;
5 - обнаружение, детектирование и декодирование информационного сигнала с учетом информации о времени прихода синхронизирующего сигнала и доплеровском сдвиге предшествующего ему синхронизирующего сигнала приемником.
Фиг. 2. Пример связного сигнала.
6 - синхронизирующий сигнал;
7 - информационный сигнал.
Предлагаемый в настоящем изобретении способ использует одну излучающую и одну приемную базы. Операция излучения по гидроакустическому каналу связного сигнала (поз. 1 на фиг. 1) реализуется аналогично соответствующей операции прототипа, при помощи устройства, включающего в себя: модулятор, позволяющий генерировать модулированный связной сигнал; гидроакустический излучатель и гидроакустическую антенну, распространяющие связной сигнал.
Структура приемной базы, осуществляющей прием связного сигнала (поз. 2 и 4 на фиг. 1), в простейшем случае включает в себя гидроакустическую антенну, преобразующую принимаемые акустические сигналы в электрические, демодулятор и декодирующее устройство для определения параметров синхронизирующего сигнала (поз. 3 на фиг. 1), а также средство обработки принимаемых сигналов, в котором осуществляется обнаружение, детектирование и декодирование информационного сигнала с учетом измеренных параметров синхронизирующего сигнала.
Таким образом, система, описанная выше, позволяет передавать синхронизирующий и информационный сигналы по одному каналу, тем самым обеспечивая согласованность этих сигналов по времени.
На фиг. 2 приведен пример графика связного сигнала, осуществляющего способ, предложенный в настоящем изобретении. Связной сигнал включает в себя синхронизирующий сигнал 6, а также информационный сигнал 7, передаваемый через определенный интервал времени Δt. Таким образом, момент обнаружения информационного сигнала определяют по моменту приема синхронизирующего сигнала.
Измерению могут подлежать следующие параметры синхронизирующего сигнала (поз. 3 на фиг. 1):
- частота;
- длительность;
- время прихода;
- направление прихода.
Измерения параметров синхронизирующего сигнала производятся следующим образом.
Частота измеряется посредством реализации гребенки согласованных фильтров, настроенных на разные альтернативы частоты (функцию этой гребенки, например, при тональных сигналах играет процедура дискретного преобразования Фурье или спектрального анализа), выход каждого фильтра гребенки через детектор подключен ко входу решающего устройства, например, определяющего номер канала фильтрации, в котором отклик на сигнал имеет максимальную амплитуду ([3], с. 204 и с. 205, рис. 14.2). При работе с широкополосными (сложными) связными сигналами в простейшем случае под частотой понимается его средняя частота, которая может быть измерена аналогично частоте синхронизирующего сигнала; при этом, как указано выше, реализуется гребенка фильтров, согласованных с альтернативами частот сложных сигналов. В отличие от способа-прототипа, также определяется доплеровский сдвиг сигнала и (в случае применения многоэлементной приемной антенны) направление его прихода.
Время прихода синхронизирующего сигнала определяется при его обнаружении и детектировании ([3], с. 203, с. 204, рис. 14.1).
Длительность синхронизирующего сигнала может измеряться совместно со временем его прихода. При этом фиксируются результаты измерения времен (моментов) прихода переднего и заднего фронтов этого сигнала, после чего длительность сигнала определяется как разность этих времен. Для измерения указанных моментов сигнал с выхода цепочки «фильтр-детектор» поступает на пороговое устройство. Моментом прихода переднего фронта сигнала является момент начала превышения сигналом на входе порогового устройства порога, а заднего фронта - момент прекращения этого превышения.
Направление прихода синхронизирующего сигнала определяется посредством его моноимпульсного (например, фазового) пеленгования ([3], с. 216 и с. 217, рис. 14.16).
При обнаружении, детектировании и декодировании связного сигнала (поз. 5 на фиг. 1) вначале осуществляется оценивание момента прихода заднего фронта синхронизирующего сигнала, а затем от этого момента отсчитывается интервал времени Δt и определяется момент прихода переднего фронта информационного сигнала.
Таким образом использование заявленного способа позволяет обеспечивать связь с быстроходным ПО.
Список литературы:
1. Патент РФ № RU 2535238 C1, 21.06.2013
2. Патент РФ № RU 2364888 C2, 03.06.2004
3. Ширман Я.Д., Манжос В.Н.. Теория и техника обработки радиолокационной информации на фоне помех. М.: Радио и связь. 1981.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СИНХРОНИЗАЦИИ ФУНКЦИЙ ИЗЛУЧЕНИЯ И ПРИЕМА В БИСТАТИЧЕСКОМ ГИДРОЛОКАТОРЕ | 2013 |
|
RU2535238C1 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2659710C1 |
| Способ передачи информации по гидроакустическому каналу на дальние дистанции | 2024 |
|
RU2825432C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ РАДИОСИГНАЛОВ СИСТЕМЫ СПУТНИКОВОЙ СВЯЗИ ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2562961C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| Бистатический способ обнаружения подводной цели и бистатический гидролокатор | 2018 |
|
RU2694795C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы | 2023 |
|
RU2825760C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ НА МОРСКОМ РУБЕЖЕ В МЕЛКОМ МОРЕ | 1999 |
|
RU2161319C1 |
Изобретение относится к способам бистатической гидролокации, в которых связь между разнесенными в пространстве приемником и передатчиком осуществляется по гидроакустическому каналу. Способ предназначен для применения в быстродвижущихся подводных объектах (ПО) и может быть использован как для получения информации от передатчика, так и для решения задачи навигации. Задачей заявляемого способа является компенсация доплеровского искажения связного сигнала путем его определения по принятому синхронизирующему сигналу и учета при обнаружении, детектировании и декодировании информационного сигнала. В качестве синхронизирующего сигнала применяется тональный сигнал или одна из реализаций последовательности Костаса в виде 32 элементарных тональных сигналов. Технический результат изобретения - возможность осуществления гидроакустической связи с быстроходным ПО путем компенсации доплеровского сдвига при обнаружении, детектировании и декодировании информационного сигнала. Заявляемый способ осуществления гидроакустической связи с быстроходным ПО предусматривает реализацию следующих операций: излучение связного сигнала, состоящего из синхронизирующего сигнала и информационного сигнала с заданным временным интервалом между ними; прием синхронизирующего сигнала и определение доплеровского сдвига частот связного сигнала; прием информационного сигнала и его детектирование и декодирование с учетом информации о доплеровском сдвиге предшествующего ему синхронизирующего сигнала. Таким образом, система, описанная выше, позволяет передавать синхронизирующий и информационный сигналы по одному каналу, тем самым обеспечивая согласованность этих сигналов по времени. 2 ил.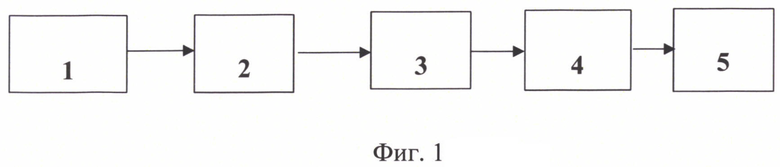
Способ осуществления гидроакустической связи с быстроходным подводным объектом, включающий излучение по гидроакустическому каналу связного сигнала, состоящего из синхронизирующего и информационного сигналов, прием на подводном объекте связного сигнала и декодирование информационного сигнала с учетом информации о времени прихода синхронизирующего сигнала и его доплеровском сдвиге, отличающийся тем, что синхронизирующий сигнал формируют в виде одной из возможных реализаций последовательности Костаса элементарных тональных сигналов.
| МУЛЬТИСТАТИЧЕСКАЯ АКУСТИЧЕСКАЯ СИСТЕМА И СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВОДНЫХ АППАРАТОВ | 2004 |
|
RU2364888C2 |
| Бистатический способ обнаружения подводной цели и бистатический гидролокатор | 2018 |
|
RU2694795C1 |
| И.Н | |||
| Бурдинский и др | |||
| Обработка фазоманипулированных шумоподобных сигналов гидроакустических систем с учетом эффекта Доплера | |||
| Вестник ТОГУ, 2016, номер 4 (43), стр | |||
| Насос | 1917 |
|
SU13A1 |
| СПОСОБ ОЦЕНКИ ДОПЛЕРОВСКОГО СМЕЩЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ СЛОЖНОГО СИГНАЛА | 2014 |
|
RU2565237C1 |
| С.С | |||
| Грицутенко, А.С | |||
| Сидоренко | |||
| Компенсация эффекта Доплера в OFDM-сигнале | |||
| Известия | |||

