Фие.2
Изобретение относится к области навигационной гидроакустики и может быть использовано в гидроакустических станциях, предназначенных для работы в системах с большой базой (в которых координаты корабля, оборудованного дальномером, определяют относительно трех маяков-ответчиков (МО), установленных на грунте) при решении частной задачи выхода корабля на один МО.
Цель изобретения - повышение точности определения места маяка-ответчика.
На фиг. 1 изображена схема перемещения аппарата относительно МО; на фиг. 2 - структурная схема гидроакустической станции для определения местоположения маяка-ответчика; на фиг. 3 - временные диаграммы, поясняющие принцип работы станции.
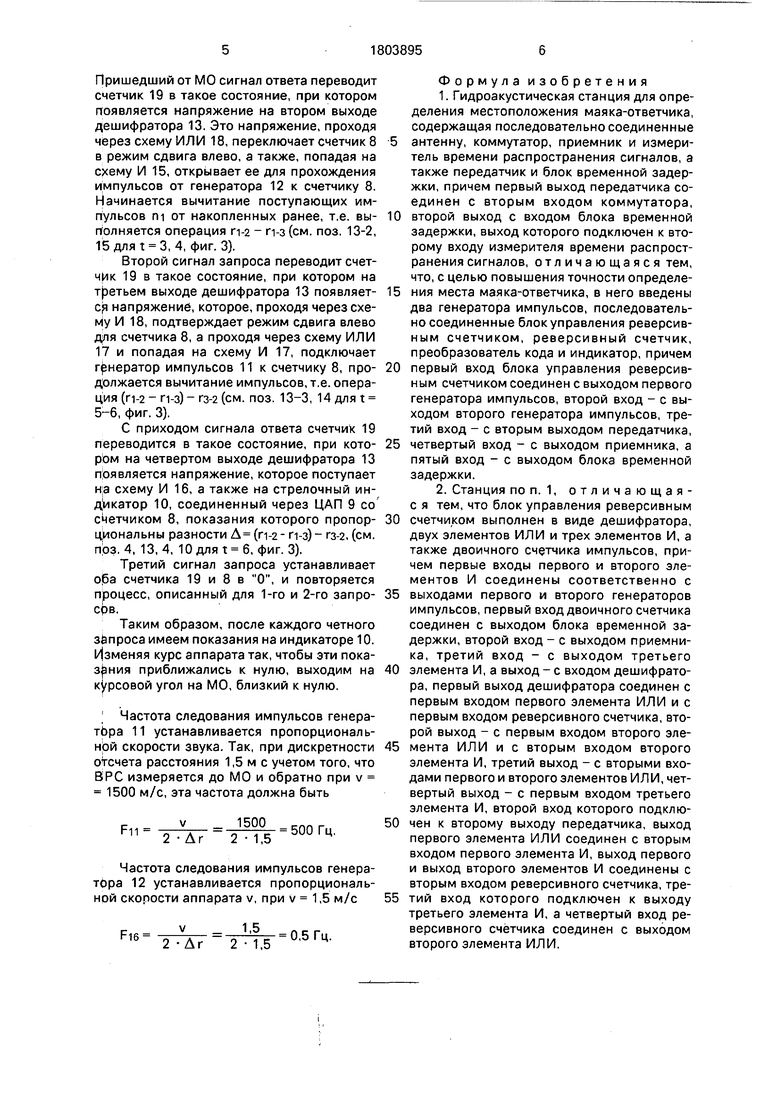
Станция содержит антенну 1, коммутатор 2, передатчик 3, приемник 4, блок 5 временной задержки, измеритель 6 времени распространения сигналов, блок 7 управления реверсивным счетчиком, реверсивный счетчик 8, преобразователь кода 9, индикатор 10, первый и второй генераторы импульсов 11 и 12, дешифратор 13, с первого пп третий элементы И 14-16, первый и второй элементы ИЛИ 17 и 18, двоичный счетчик импульсов 19.
Способ работы дальномера в режиме выхода на МО поясняется фиг. 1, на котором аппарат при первом измерении расстояния до МО находится в точке 1, при втором измерении - в точке 3,3 или 3, МО - в точке 2.
При движении аппарата прямо на МО по линии 1-3 разность расстояний п-2 - м-з - гз-2 О,
где п-2 и гз-2 - расстояния от аппарата до МО из точек 1 и 3, а расстояние, проходимое аппаратом между точками 1 и 3, п-з v П, где v - скорость движения аппарата, Ti - время перемещения из точки 1 в точку 3.
Очевидно, что при отклонении аппарата от направления на МО будут справедливы соотношения I п-2 --п-з - гз-2 I I П-2
- п-з - гз-2 I I п-2 - п-з - гз-2 I, т.е. чем больше аппарат отклоняется от этого направления, тем большей по абсолютной величине будет разность этих расстояний, т.е. тем большими будут показания индикатора. На фиг. 2 приведена блок-схема станции. Антенна 1 через коммутатор 2 соединена с передатчиком 3 и приемником 4. Передатчик 3 через устройство временной задержки 5 соединен с измерителем ВРС б, счетчик импульсов 19 соединен с дешифратором 13, который соединен с первой и второй схемами ИЛИ 17 и 18, второй и третьей
схемами И 15 и 16. Генераторы импульсов 11 и 12 через схемы И 14 и 15 соединены с реверсивным счетчиком 8, который через преобразователь кода 9 соединен с индикатором 10.
Аналогом передатчика могут служить измерительный генератор 3-110 с программатором 321, позволяющие формировать радиоимпульсы с различными частотами заполнения. Управление программатором вручную от его кнопки Пуск. В программаторе имеется формирователь временной задержки и синхроимпульс для пуска измерителей ВРС. Измерители ВРС-частотомеры ЧЗ-34А, 43-33.
Работа дальномера при взаимодействии с тремя МО происходит следующим образом, Антенна 1 излучает сигнал запроса МО, сформированный передатчиком 3, с задержкой, равной задержке моментов регистрации принятых МО и дальномером сигналов запроса и ответа, вырабатываемой устройством 5. Запускаются измерители ВРС. МО, приняв сигнал запроса, излучают
сигналы ответа каждый на своей индивидуальной несущей частоте. Сигналы ответа принимаются антенной 1 и, пройдя через коммутатор 2 и приемник 4, останавливают процесс измерения ВРС в измерителях 6.
По измеренным ВРС до МО и известной скорости звука тем или иным способом определяют расстояния до МО.
В режиме выхода на одиночный МО предварительно по результатам измерения
расстояний до МО определяют, что расстояния уменьшаются, т.е. аппарат движется к МО, вход двоичного счетчика соединяют с выходом приемника, настроенного на частоту ответа МО. Посылают первый сигнал
запроса (см. фиг. 3, приведены эпюры напряжений в блоках дальномера, по оси ординат указаны позиционные номера соответствующих блоков). При этом сигнал от передатчика 3 поступает на схему И 16, и
при наличии на другом ее входе напряжения с выхода 4 дешифратора 13 происходит установка счетчиков 8 и 19 в О (см. поз. 3, 5, 8-4 для t 0, 1, 2, фиг. 3).
Задним фронтом импульса от формирователя 5 счетчика 16 переводится в такое состояние, при котором появляется напряжение на первом выходе дешифратора 13, которое через схему ИЛИ 17 попадает на
схему И 14, а также на включение режима сдвига вправо счетчика 8, и начинается заполнение счетчика 8 импульсами от генератора 11 (см. поз. 8-1, 14 для t 2, 3). В счетчик записывается количество импульсов п пропорциональное расстоянию п-2.
Пришедший от МО сигнал ответа переводит счетчик 19 в такое состояние, при котором появляется напряжение на втором выходе дешифратора 13. Это напряжение, проходя через схему ИЛИ 18, переключает счетчик 8 в режим сдвига влево, а также, попадая на схему И 15, открывает ее для прохождения импульсов от генератора 12 к счетчику 8. Начинается вычитание поступающих импульсов m от накопленных ранее, т.е. выполняется операция п-2 - п-з (см. поз. 13-2, 15 для t 3, 4, фиг. 3).
Второй сигнал запроса переводит счетчик 19 в такое состояние, при котором на третьем выходе дешифратора 13 появляет- ср напряжение, которое, проходя через схему И 18, подтверждает режим сдвига влево для счетчика 8, а проходя через схему ИЛИ 17 и попадая на схему И 17, подключает генератор импульсов 11 к счетчику 8, продолжается вычитание импульсов, т.е. операция (п-2 - п-з) - гз-2 (см. поз. 13-3, 14 для t 5-6, фиг. 3).
С приходом сигнала ответа счетчик 19 переводится в такое состояние, при котором на четвертом выходе дешифратора 13 появляется напряжение, которое поступает на схему И 16, а также на стрелочный ин- дикатор 10, соединенный через ЦАП 9 со счетчиком 8, показания которого пропорциональны разности А(п-2- П-з) гз-2, (см. поз. 4, 13, 4, 10 для t 6, фиг. 3).
Третий сигнал запроса устанавливает оба счетчика 19 и 8 в О, и повторяется процесс, описанный для 1-го и 2-го запросов.
Таким образом, после каждого четного запроса имеем показания на индикаторе 10. Изменяя курс аппарата так, чтобы эти пока- з&ния приближались к нулю, выходим на курсовой угол на МО, близкий к нулю.
; Частота следования импульсов генератора 11 устанавливается пропорциональной скорости звука. Так, при дискретности отсчета расстояния 1,5 м с учетом того, что ВРС измеряется до МО и обратно при v 1500 м/с, эта частота должна быть
Fn
у 1500 2 А г 2-1,5
500 Гц.
Частота следования импульсов генератора 12 устанавливается пропорциональной скорости аппарата v, при v 1,5 м/с
F«
0.5r,
Формула изобретения
1. Гидроакустическая станция для определения местоположения маяка-ответчика, содержащая последовательно соединенные
антенну, коммутатор, приемник и измеритель времени распространения сигналов, а также передатчик и блок временной задержки, причем первый выход передатчика соединен с вторым входом коммутатора,
второй выход с входом блока временной задержки, выход которого подключен к второму входу измерителя времени распространения сигналов, отличающаяся тем, что, с целью повышения точности определения места маяка-ответчика, в него введены два генератора импульсов, последовательно соединенные блок управления реверсив- ным счетчиком, реверсивный счетчик, преобразователь кода и индикатор, причем
первый вход блока управления реверсивным счетчиком соединен с выходом первого генератора импульсов, второй вход - с выходом второго генератора импульсов, третий вход - с вторым выходом передатчика,
четвертый вход - с выходом приемника, а пятый вход - с выходом блока временной задержки.
2. Станция по п. 1, отличающая- с я тем, что блок управления реверсивным
счетчиком выполнен в виде дешифратора, двух элементов ИЛИ и трех элементов И, а также двоичного счетчика импульсов, причем первые входы первого и второго элементов И соединены соответственно с
выходами первого и второго генераторов импульсов, первый вход двоичного счетчика соединен с выходом блока временной задержки, второй вход - с выходом приемника, третий вход - с выходом третьего
элемента И, а выход - с входом дешифратора, первый выход дешифратора соединен с первым входом первого элемента ИЛИ и с первым входом реверсивного счетчика, второй выход - с первым входом второго элемента ИЛИ и с вторым входом второго элемента И, третий выход - с вторыми входами первого и второго элементов ИЛИ, четвертый выход - с первым входом третьего элемента И, второй вход которого подключен к второму выходу передатчика, выход первого элемента ИЛИ соединен с вторым входом первого элемента И, выход первого и выход второго элементов И соединены с вторым входом реверсивного счетчика, третий вход которого подключен к выходу третьего элемента И, а четвертый вход реверсивного счётчика соединен с выходом второго элемента ИЛИ.
Фиг. 3
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 1995 |
|
RU2084923C1 |
| ГИДРОАКУСТИЧЕСКИЙ НАВИГАЦИОННЫЙ ДАЛЬНОМЕР | 1976 |
|
SU1840678A1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| РАДИОЛОКАЦИОННЫЙ ОТВЕТЧИК | 1980 |
|
SU1840987A1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| Дальномер радиотехнической системы ближней навигации | 1986 |
|
SU1378598A1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2353949C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 2004 |
|
RU2289149C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |

Изобретение относится к области навигационной гидроакустики. Целью изобретения является повышение точности определения места маяка-ответчика. Цель достигается введением в устройство двух генераторов 11 и 12, последовательно соединенных блока 7 управления реверсивным счетчиком, реверсивного счетчика 8, преобразователя кода 9 и индикатора 10, причем первый вход блока 7 управления реверсивным счетчиком соединен с выходом первого генератора импульсов 11, второй вход - с выходом второго генератора импульсов 12, третий вход - с вторым выходом передатчика 2, четвертый вход - с выходом приемника 4 а пятый вход - с выходом блока временной задержки 5. 2 з.п. ф-лы, 3 ил.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3864662, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Бородин В | |||
| И | |||
| и др | |||
| Гидроакустические навигационные средства | |||
| - Л.: Судостроение, 1983, с | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
