Изобретение относится к радиотехнике и может быть использовано для построения высотомеров или высокоточных измерителей уровня жидкостей или сыпучих веществ в резервуарах.
Известен способ радиолокационного измерения дальности на основе излучения зондирующего ЛЧМ-сигнала и приема отраженного сигнала в точке излучения [Г.Б.Белоцерковский. Основы радиолокации и радиолокационные устройства. - М.: Сов. радио. - 1975, с.77]. В нем излучаемый зондирующий ЛЧМ-сигнал смешивается с отраженным, в результате образуется разностный сигнал с частотой биений Fб, которую пересчитывают в дальность Н по формуле
где С=3·108 м/с - скорость света;
T - период модуляции зондирующего сигнала;
Δf - девиация частоты.
Признаками, общими у этого аналога с заявляемым способом, являются излучение зондирующего ЛЧМ-сигнала в направлении отражающей поверхности, прием отраженного сигнала в точке излучения, смешивание принятого сигнала с зондирующим, формирование сигнала биений и измерение его частоты.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является низкая точность, обусловленная большой погрешностью измерения частоты биений, осуществляемой в этом аналоге методом "счета нулей" (ошибка дискретизации), а также погрешностью установки и нестабильностью величины девиации частоты зондирующего сигнала.
Известен также способ измерения дальности на основе излучения зондирующего ЛЧМ-сигнала по заявке Японии 30-1591, МКИ 5 G01S 13/34 [Реф. журнал "Изобретения стран мира", 1985, №115, с.29].
В этом способе приняты некоторые меры для уточнения точности измерения частоты биений (регистрация в сигнале биений заранее заданных точек - нулей, максимумов, минимумов).
Этот аналог имеет с заявляемым способом те же общие признаки, что и первый аналог.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является относительно низкая точность, обусловленная погрешностью установки и нестабильностью величины девиации частоты зондирующего сигнала.
Существенные меры для уменьшения ошибки за счет нестабильности девиации приняты в способе измерения дальности, реализованном в радиолокационном дальномере, защищенный патентом РФ №2151408, G01S 13/34. Бюллетень изобретений, 2000, №17.
Здесь путем введения ряда дополнительных устройств осуществляется стабилизация крутизны изменения сигнала и устраняются скачки фазы в сигнале биений. Тем самым уменьшаются ошибка за счет нестабильности девиации и ошибка дискретизации.
Этот аналог с заявляемым способом имеет те же общие признаки, что и первые два аналога.
Причинами, препятствующими достижению в этом аналоге технического результата, обеспечиваемого изобретением, является сложность реализации способа, обусловленная необходимостью введения формирователя частотных меток, интегратора и дискриминатора интервала времени в устройство, реализующее способ, существенная ограниченность частоты работы, а также недостаточная точность работы, обусловленная нестабильностью фильтров, входящих в состав формирователя частотных меток.
Наиболее близким по технической сущности к заявляемому (прототипом) является способ измерения малых расстояний до отражающих поверхностей, реализованный в радиолокационном дальномере, защищенном патентом РФ на полезную модель №32287, кл. G01S 13/34, 2003 г."Радиолокационный дальномер" и описанный в ст.: Чекрыгина И.М., Байлов В.В., Чепелев В.И. "Способ повышения точности радарных измерителей уровня жидкости" // Вопросы специальной радиоэлектроники. Сер. ОВР. - Москва-Таганрог. - 2001, вып.2. - С.153-157.
В соответствии с этим способом в направлении отражающей поверхности излучают зондирующий сигнал с ЛЧМ, в точке излучения принимают отраженный сигнал, смешивают его с зондирующим, формируют сигнал частоты биений, измеряют эту частоту и используют результат измерения для определения расстояния от точки излучения зондирующего сигнала по формуле:
где Н - измеряемое расстояние;
Fб - измеренная частота биений;
С - скорость света;
Δf - девиация частоты зондирующего сигнала при его линейной перестройке;
τ - время перестройки частоты зондирующего сигнала от минимально возможной до максимально возможной в одном цикле перестройки.
При этом с целью учета фактической скорости перестройки зондирующего сигнала формируют два высокостабильных СВЧ-сигнала, частоты которых точно совпадают с требуемыми минимальной и максимальной частотами зондирующего сигнала, в моменты совпадений частоты зондирующего сигнала соответственно с первой и второй из этих частот формируют короткие импульсы, измеряют временной сдвиг между этими импульсами и принимают результат измерения в качестве времени τ перестройки частоты в одном цикле при расчете расстояния H.
Все перечисленные признаки способа-прототипа, основанного на излучении в направлении отражающей поверхности зондирующего СВЧ-сигнала с линейной частотной модуляцией, приеме в точке излучения отраженного сигнала, смещении принятого сигнала с зондирующим, формировании сигнала частоты биений зондирующего и отраженного сигналов, измерении этой частоты и определении по результатам измерения расстояния от точки излучения до отражающей поверхности как величины, пропорциональной измеренной частоте, за исключением формирования высокостабильных СВЧ-сигналов с заданными частотами и остальных операций по определению интервала времени τ, входят и в состав заявляемого способа.
Причинами, препятствующими достижению в способе-прототипе технического результата, обеспечиваемого изобретением, являются относительная сложность реализации способа и невысокая точность. Сложность обусловлена необходимостью введения в состав устройства, реализующего способ, высокостабильных генераторов импульсов, фильтров, умножителей частоты, смесителей, узкополосных усилителей. Недостаточная точность обусловлена тем обстоятельством, что моменты времени совпадения частоты зондирующего сигнала с эталонными частотами, равными требуемым минимальной и максимальной частотами, определяются с большой погрешностью. Кроме того, ни в прототипе, ни в остальных аналогах не учитывается, что в реальных устройствах, реализующих указанные способы, частотная модуляция не является строго линейной. Реальная модуляционная характеристика, строго говоря, нелинейна, то есть крутизна перестройки, строго говоря, непостоянна. Это приводит к определенной погрешности измерения.
Технической задачей, на решение которой направлено изобретение, является повышение точности измерения расстояния.
Для достижения указанного технического результата в известном способе измерения малых расстояний, основанном на излучении в направлении отражающей поверхности зондирующего СВЧ- сигнала с линейной частотной модуляцией, приеме в точке излучения отраженного сигнала, смешении принятого сигнала с зондирующим, формировании сигнала частоты биений зондирующего и отраженного сигналов, измерении этой частоты и определении по результатам измерения расстояния от точки излучения до отражающей поверхности как величины, пропорциональной измеренной частоте, измеряют крутизну перестройки частоты зондирующего сигнала как функцию времени, прошедшего от начала перестройки, результат измерения записывают в оперативную память устройства, реализующего способ, а расстояние H от точки излучения зондирующего сигнала до отражающей поверхности определяют из соотношения:
 ,
,
где H - измеряемое расстояние;
С - скорость света;
Fб(t) и γ(t) - частота биений и крутизна перестройки частоты зондирующего сигнала как функции времени, отсчитываемого от начала цикла перестройки частоты.
Отсутствуют какие-либо источники информации, в которых вновь введенные действия и операции были описаны в совокупности с остальными действиями и операциями заявляемого способа. Поэтому предлагаемый способ следует считать новым и имеющим изобретательский уровень.
Сущность изобретения поясняется чертежами, на которых приведены:
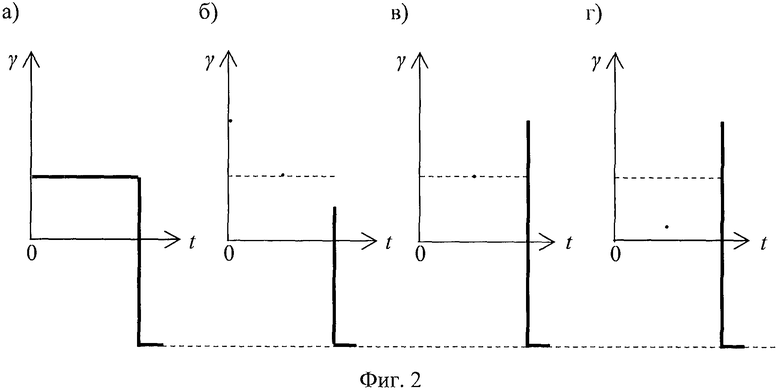
- на фиг.1 - типовые модуляционные характеристики генератора зондирующего сигнала;
- на фиг.2 - соответствующие этим характеристикам зависимости крутизны перестройки частоты от времени, отсчитываемого от начала цикла перестройки частоты.
Предлагаемый способ измерения расстояния заключается в следующем.
Формируют зондирующий СВЧ-сигнал с линейной частотной модуляцией. Этот сигнал излучают в направлении подстилающей отражающей поверхности, расстояние до которой подлежит измерению. Точку излучения располагают, как правило, над отражающей поверхностью. В способах измерения высоты в качестве отражающей поверхности может служить, например, земная или водная поверхность, а точка излучения зондирующего сигнала вместе со всей аппаратурой, реализующей способ, - на летательном аппарате, высота полета которого подлежит измерению. В уровнемерах при измерении уровня жидкости или сыпучего вещества, хранящихся в больших резервуарах, в качестве отражающей поверхности служит поверхность этого вещества, а точку излучения зондирующего сигнала располагают на краю резервуара с контролируемым веществом или выше края на точно известном фиксированном расстоянии от него.
Отраженный от контролируемой поверхности сигнал принимают в точке излучения и смешивают с излученным зондирующим сигналом. Излучение и прием сигнала осуществляют, как правило, одной и той же приемопередающей антенной. Остальная часть аппаратуры, реализующей способ, может быть расположена на необходимом по условиям размещения расстоянии от антенны. В результате смешения формируются сумма и разность излученного и зондирующего сигналов, которые пропускают через полосовой фильтр. Суммарный сигнал этим фильтром подавляется, а разностный с частотой биений Fб усиливается. Частоту Fб биений измеряют и используют в дальнейшем для измерения расстояния между точкой излучения зондирующего сигнала и отражающей поверхностью.
В упомянутых выше аналогах и прототипе измеренную частоту Fб биений преобразуют в расстояние Н в соответствии с формулой:
где С - скорость света;
Δf - девиация частоты зондирующего сигнала с линейной частотной модуляцией;
τ - время линейной перестройки частоты зондирующего сигнала от минимально возможной fн до максимально возможной fв (фиг.1, а).
Следует отметить, что в реальных перестраиваемых по частоте генераторах СВЧ-сигналов закон перестройки частоты считать линейным можно только в первом приближении. То есть модуляционная характеристика, показанная на фиг.1, а, строго говоря, чисто теоретическая, таковой ее можно считать лишь для малой девиации Δf зондирующего сигнала. Реальные СВЧ-генераторы, перестраиваемые в достаточно широких пределах, имеют нелинейную модуляционную характеристику (зависимость частоты от времени t, отсчитываемого от начала цикла перестройки частоты). Она может быть выпуклой (фиг.1, б), вогнутой (фиг.1, в) или выпукло-вогнутой (фиг.1, г), или их комбинацией. Кроме того, фактические значения минимальной fн и максимальной fв частот, а следовательно, и девиация Δf частоты могут отличаться от расчетных вследствие нестабильности СВЧ-генераторов во времени.
Существует ряд мер уменьшения нестабильности СВЧ-генераторов и нелинейности их модуляционных характеристик. Однако эти меры значительно усложняют реализацию способа и уменьшают его надежность. Кроме того, нелинейность перестройки частоты хотя и уменьшается, но в определенной степени все равно остается. Это вызывает изменение крутизны у перестройки частоты во времени, в том числе в процессе цикла перестройки. На фиг.2, а показана зависимость (точнее независимость) крутизны γ перестройки частоты от времени для линейной модуляционной характеристики, а на фиг.2, б-2, г зависимости γ(t) крутизны перестройки частоты от времени, отсчитываемого с начала цикла перестройки, соответствующие соответственно выпуклой, вогнутой и выпукло-вогнутой модуляционным характеристикам. Указанные обстоятельства приводят как к изменению частоты Fб биений в процессе перестройки, так и к отклонению девиации Δf частоты от расчетной, что вызывает, в свою очередь, ошибку измерения расстояния H, то есть снижает точность прототипа и остальных аналогов.
Для исключения или, как минимум, уменьшения этой ошибки измерения в заявляемом способе в генераторе зондирующего сигнала предварительно измеряют крутизну (скорость) перестройки частоты, то есть производную модуляционной характеристики как функцию γ(t) времени t, отсчитываемого от начала цикла перестройки частоты. Результаты этого измерения записывают в оперативную память устройства, реализующего предлагаемый способ. Эти операции выполняются не с каждым циклом перестройки частоты, а эпизодически, дополнительно к процессу измерения расстояния H. Период обновления результатов измерения крутизны перестройки частоты и перезаписи этих результатов выбирают таким, чтобы за время этого периода модуляционная характеристика перестраиваемого генератора не успевала существенно измениться. Частоту Fб(t) биений также измеряют как функцию времени t, отсчитываемого от начала цикла перестройки частоты, а измеряемое расстояние H определяют из соотношения:
 .
.
Использование этого соотношения позволяет учесть реальное изменение частоты Fб(t) биений, вызванное нелинейностью модуляционной характеристики перестраиваемого генератора, и исключить связанную с этой нелинейностью ошибку измерения расстояния H.
Это позволяет сделать вывод, что точность измерения у заявляемого способа выше, чем у прототипа.
Предлагаемый способ достаточно легко реализуем.
Формирование сигнала биений и измерение его частоты могут быть реализованы на основе высокостабильного генератора тактовых импульсов, контроллера, генератора пилообразного напряжения, модулятора, приемно-передающего модуля, направленного ответвителя, усилителя-формирователя и приемно-передающей антенны, как это реализовано в радиолокационном дальномере, защищенном патентом РФ №32387 на полезную модель. Для формирования сигнала, пропорционального крутизне γ(t) перестройки частоты в устройство, реализующее предлагаемый способ, достаточно ввести элемент задержки, смеситель и полосовой фильтр. Перестраиваемый по частоте зондирующий СВЧ-сигнал необходимо пропускать через элемент задержки. При этом с помощью смесителя сигналы с входа и с выхода элемента задержки следует смешивать, а с помощью фильтра из полученной смеси сигналов выделять разностный сигнал. Его частота пропорциональна крутизне γ(t) перестройки частоты зондирующего сигнала и может быть измерена контроллером.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННЫЙ УРОВНЕМЕР | 2012 |
|
RU2518373C1 |
| РАДИОВЫСОТОМЕР С ЧАСТОТНО-МОДУЛИРОВАННЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 2012 |
|
RU2519952C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОГЕРЕНТНОГО ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ДЛЯ РЛС С ПЕРИОДИЧЕСКОЙ ЧМ МОДУЛЯЦИЕЙ И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ СПОСОБ | 2006 |
|
RU2347235C2 |
| ИМПУЛЬСНЫЙ РАДИОВЫСОТОМЕР | 2012 |
|
RU2519914C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И УСТРОЙСТВО РАДИОВЫСОТОМЕРА С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550082C1 |
| КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ПОДАВЛЕНИЯ СИСТЕМЫ РАДИОСВЯЗИ | 2013 |
|
RU2539334C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И РАДИОВЫСОТОМЕР С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩИЙ СПОСОБ | 2013 |
|
RU2555865C2 |
| РЕЦИРКУЛЯЦИОННЫЙ РАДИОВЫСОТОМЕР | 2012 |
|
RU2519911C2 |
| Способ обработки сигнала в скаттерометре Ku-диапазона космического базирования с вращающейся "веерной" диаграммой направленности | 2023 |
|
RU2832598C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И РАДИОВЫСОТОМЕР С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩИЙ СПОСОБ | 2013 |
|
RU2552515C2 |
Изобретение может быть использовано для построения высотомеров или высокоточных измерителей уровня жидкостей или сыпучих веществ в резервуарах. Достигаемый технический результат - повышение точности измерения расстояния. Указанный результат заключается в том, что заявленный способ основан на излучении в направлении отражающей поверхности зондирующего СВЧ-сигнала с линейной частотной модуляцией, приеме в точке излучения отраженного сигнала, смешении принятого сигнала с зондирующим, формировании сигнала частоты биений зондирующего и отраженного сигналов, измерении этой частоты и определении по результатам измерения расстояния от точки излучения до отражающей поверхности как величины, пропорциональной измеренной частоте, измерении крутизны перестройки частоты зондирующего сигнала как функции времени, прошедшего от начала цикла перестройки, результат измерения записывают в оперативную память устройства, реализующего способ, а расстояние Н от точки излучения зондирующего сигнала до отражающей поверхности определяют из соотношения:
, где Н - измеряемое расстояние; С-3·108 м/с - скорость света; Fб(t) и γ(t) - частота биений и крутизна перестройки частоты зондирующего сигнала как функции времени, отсчитываемого от начала цикла перестройки частоты. 2 ил.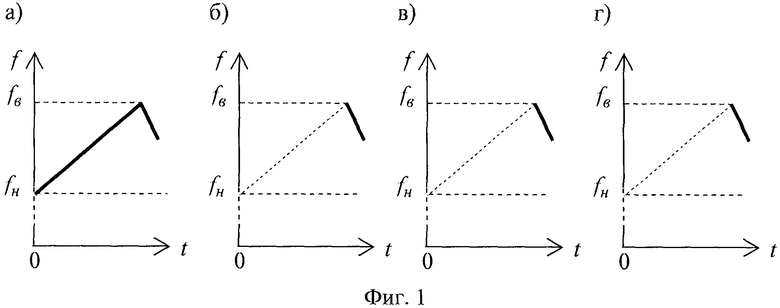
Способ радиолокационного измерения расстояния, основанный на излучении в направлении отражающей поверхности зондирующего СВЧ-сигнала с линейной частотной модуляцией, приеме в точке излучения отраженного сигнала, смешении принятого сигнала с зондирующим, формировании сигнала частоты биений зондирующего и отраженного сигналов, измерении этой частоты и определении по результатам измерения расстояния от точки излучения до отражающей поверхности как величины, пропорциональной измеренной частоте, отличающийся тем, что измеряют крутизну перестройки частоты зондирующего сигнала как функции времени, прошедшего от начала цикла перестройки, результат измерения записывают в оперативную память устройства, реализующего способ, а расстояние Н от точки излучения зондирующего сигнала до отражающей поверхности определяют из соотношения:
.
| Сепаратор | 1932 |
|
SU32287A1 |
| РАДИОЛОКАТОР МАЛЫХ ДАЛЬНОСТЕЙ | 1992 |
|
RU2037843C1 |
| Устройство для измерения расстояния | 1991 |
|
SU1802351A1 |
| Способ очистки деталей от загрязнении и покрытий не жирового происхождения | 1956 |
|
SU108636A1 |
| US 4733239 A, 22.03.1988 | |||
| US 6166682 A, 26.12.2000 | |||
| JP 2010076037 , 08.07.2010. | |||

