Изобретение относится к области радиотехники, а более конкретно к способам обработки сигналов при радиолокационном дистанционном зондировании земной поверхности с использованием скаттерометров космического базирования. Скаттерометры космического базирования обеспечивают оперативное глобальное измерение удельной эффективной площади рассеяния (УЭПР) участков поверхности мирового океана под различными азимутальными углами при помощи излучения, приема и обработки зондирующих импульсов СВЧ-диапазона. Полученная информация используется, главным образом, в целях определения параметров приводного (приповерхностного) ветра.
Для обеспечения приемлемой погрешности измерения УЭПР с учетом статистических особенностей рассеяния СВЧ-излучения морской поверхностью в пределах пятна облучения необходимы накопление и некогерентное усреднение результатов измерений УЭПР большого количества малых участков поверхности. Для этого в скаттерометрах космического базирования происходит разделение принятого сигнала посредством корреляционной обработки на сигналы, отраженные от элементов разрешения в пределах пятна облучения. Под элементами разрешения будем в дальнейшем понимать участки поверхности, на границе которых уровень нормированной автокорреляционной функции (АКФ) выше некоторого порога, обычно минус 3 дБ.
Известно [1 - Lecompte P. The ERS Scatterometer Instrument and the On-Ground Processing of its Data // Proceedings of the ESA Workshop on Emerging Scatterometer Applications, Noordwijk, The Netherlands, 5-7 October, 1998, pp. 241-260], что погрешность измерения УЭПР характеризуется нормированным среднеквадратичным отклонением
 ,
,
где σ - значение УЭПР;
 - среднеквадратичное отклонение оценки УЭПР;
- среднеквадратичное отклонение оценки УЭПР;
N - количество независимых измерений;
σшэ - шумовой эквивалент УЭПР.
Шумовой эквивалент - это такое значение УЭПР, при котором энергия принятого и подвергнутого корреляционной обработке сигнала от участка поверхности равна спектральной плотности мощности шумов. При уменьшении уровня сигнала шумовой эквивалент УЭПР увеличивается. Количество независимых измерений N соответствует количеству неперекрывающихся элементов разрешения.
Мощность, потребляемая скаттерометром космического базирования, строго ограничена и, следовательно, излучаемая мощность тоже. Поэтому уменьшение размера элемента разрешения приводит, с одной стороны, к увеличению количества независимых измерений N, а с другой стороны, к увеличению σшэ.
При разработке скаттерометра выбирают оптимальные размеры элементов разрешения, обеспечивающие минимальное интегральное значение Kp в требуемом диапазоне изменения измеряемых УЭПР, при ограничении на мощность, потребляемую скаттерометром. Отклонение размеров элемента разрешения от оптимальных приводит, как правило, к ухудшению качества измерений УЭПР. Длительность зондирующего импульса выбирают максимально возможной с целью снижения пиковой излучаемой мощности.
Известен способ обработки принимаемого сигнала в скаттерометре космического базирования с вращающейся «веерной» диаграммой направленности (ДН) С-диапазона [2 - United States Patent 6,137,437. Lin C.-C, Wilson J.J.W., Impagnatiello F., Park P. Spaceborne scatterometer. October 24, 2000].
Однако в данном изобретении не учтены существенные особенности обработки сигнала, отраженного от участка большой протяженности в радиальном направлении, а именно: значительное различие допплеровских сдвигов частоты для различных участков пятна облучения и различных азимутальных углов поворота антенны.
Как известно, умножение принятого ЛЧМ-сигнала на опорный ЛЧМ-сигнал и последующий Фурье-анализ в совокупности эквивалентны процедуре корреляционной обработки [3 - Skolnik М. Radar handbook. - N.Y.: McGraw-Hill, 2008 - pp. 8.31-8.36.]. При этом область неопределенности в частотно-временной плоскости определяется сочетанием девиации частоты и длительности зондирующего импульса. В то же время при вращении ДН распределение допплеровского сдвига частоты в пределах пятна облучения существенно изменяется. Таким образом, если длительность импульса и скорость изменения частоты остаются постоянными, то частотно-временные параметры зондирующего и опорного импульсов не изменяются. Это приводит к тому, что геометрические параметры элемента разрешения, определяемые частотно-временными параметрами отраженного сигнала, будут существенно изменяться.
Следствием изменения геометрических параметров элемента разрешения в зависимости от положения элемента разрешения в пределах пятна облучения и от угла поворота ДН, является увеличение погрешности измерения УЭПР. В связи с этим указанный скаттерометр имеет ограниченную промышленную применимость.
Известен способ обработки сигнала для разрешения участков поверхности и учета влияния допплеровского сдвига частоты, принятый за прототип [4 - Патент CN 101363913 B. Signal processing method of fan-shaped beam circular cone scanning microwave scatterometer, 27.09.2008]. Данный способ применяется в скаттерометре Ku-диапазона космического базирования с вращающейся «веерной» диаграммой направленности [5 - Lin W. Dong X. Design and Optimization of Ku-band Rotating, Range-Gated, Fanbeam Scatterometer // International Journal of Remote Sensing, Vol. 32, No. 8, July 2011, pp. 2151-2171].
Способ основан на выполнении следующих операций:
- линейной частотной модуляции зондирующего импульса, с неизменными длительностью и скоростью изменения частоты;
- упреждающей компенсации среднего допплеровского сдвига частоты при излучении импульса;
- определении граничных частот, соответствующих краям элементов разрешения, с учетом ожидаемого времени приема и допплеровского сдвига частоты, в промежуточном сигнале после умножения принятого сигнала на опорный ЛЧМ-сигнал;
- суммировании энергии Фурье-компонент промежуточного сигнала в интервалах частот, соответствующих элементам разрешения.
Однако, как уже указывалось выше, каждая Фурье-компонента является результатом выполнения операции вычисления корреляционного интеграла. Суммирование энергии Фурье-компонент соответствует некогерентному усреднению результатов измерений энергии сигнала.
С точки зрения использования данного способа обработки сигналов в скаттерометре космического базирования при вращении «веерной» ДН имеются следующие недостатки:
- обеспечивается только сохранение положений центров, но не сохранение размеров и ориентации элементов разрешения;
- число независимых измерений N изменяется при повороте антенны в связи с изменением размеров самих элементов разрешения.
Следствием этого является несоответствие числа независимых измерений N оптимальному, что, в свою очередь, приводит к увеличению погрешности измерения УЭПР. Анализ радиометрической точности скаттерометра при использовании предложенного способа обработки сигнала показывает, что параметр Kp действительно значительно изменяется в зависимости от угла поворота [6 - Wenming Lin, Xiaolong Dong, Di Zhu. Backscatter measurement accuracy of a spaceborne rotating fan-beam scatterometer // EUMETSAT/ESA Scatterometer Science Conference, Darmstadt, Germany, 11-13 April 2011]. Таким образом, отмеченный способ обработки, выбранный в качестве прототипа, также не учитывает все особенности обработки сигнала, отраженного от участка большой протяженности в радиальном направлении, и тем самым не обеспечивает сохранение размеров и ориентацию элемента разрешения и, как следствие, приводит к увеличению погрешности измерений.
Задачей, на решение которой направлено заявляемое изобретение, является уменьшение погрешности измерения УЭПР скаттерометром Ки-диапазона космического базирования с вращающейся «веерной» диаграммой направленности при условии ограничений на излучаемую мощность.
Для решения указанной задачи предлагается способ обработки сигнала в скаттерометре Ku-диапазона космического базирования с вращающейся «веерной» диаграммой направленности, при котором измеряют удельную эффективную площадь рассеяния поверхности мирового океана под различными азимутальными углами при помощи излучения, приема и корреляционной обработки зондирующих импульсов СВЧ-диапазона с линейной частотной модуляцией, упреждающей компенсацией среднего допплеровского сдвига частоты при излучении импульса.
Согласно изобретению, при обработке сигнала в бортовой аппаратуре скаттерометра в зависимости от угла поворота антенны при постоянной длительности сигнала изменяют девиацию частоты ЛЧМ-сигнала по закону
ΔF=ΔF0+ƒd⋅k,
где ΔF0 - средняя девиация частоты;
ƒd - ожидаемый средний допплеровский сдвиг частоты;
ƒd=ƒ1+ƒ2⋅cos(ϕA6a-ϕА0)+ƒ3⋅cosϕка⋅sin(ϕA6a-ϕА0),
где ƒ1, ƒ2, ƒ3 - константы, имеющие размерность частоты;
ϕАба - угол поворота антенны по измерениям датчиков относительно оси абсцисс системы координат (СК) скаттерометра;
ϕА0 - угол между направлением движения КА в СК скаттерометра и осью абсцисс этой СК;
ϕКА - угол возвышения КА, отсчитываемый от плоскости экватора.
k - константа, k≥0, которая зависит от орбитальных параметров движения космического аппарата и геометрических параметров пятна облучения следующим образом
где τ - длительность зондирующего импульса;
с - скорость света;
β - угол падения;
L - наклонная дальность до элемента разрешения;
R3 - радиус Земли.
Техническим результатом является уменьшение погрешности измерения удельной эффективной площади рассеяния при условии ограничения излучаемой мощности за счет сохранения геометрических параметров и ориентации элементов разрешения при вращении ДН.
Сочетание отличительных признаков и свойств предлагаемого способа из современного уровня техники неизвестно, поэтому он соответствует критериям «новизны» и «изобретательского уровня».
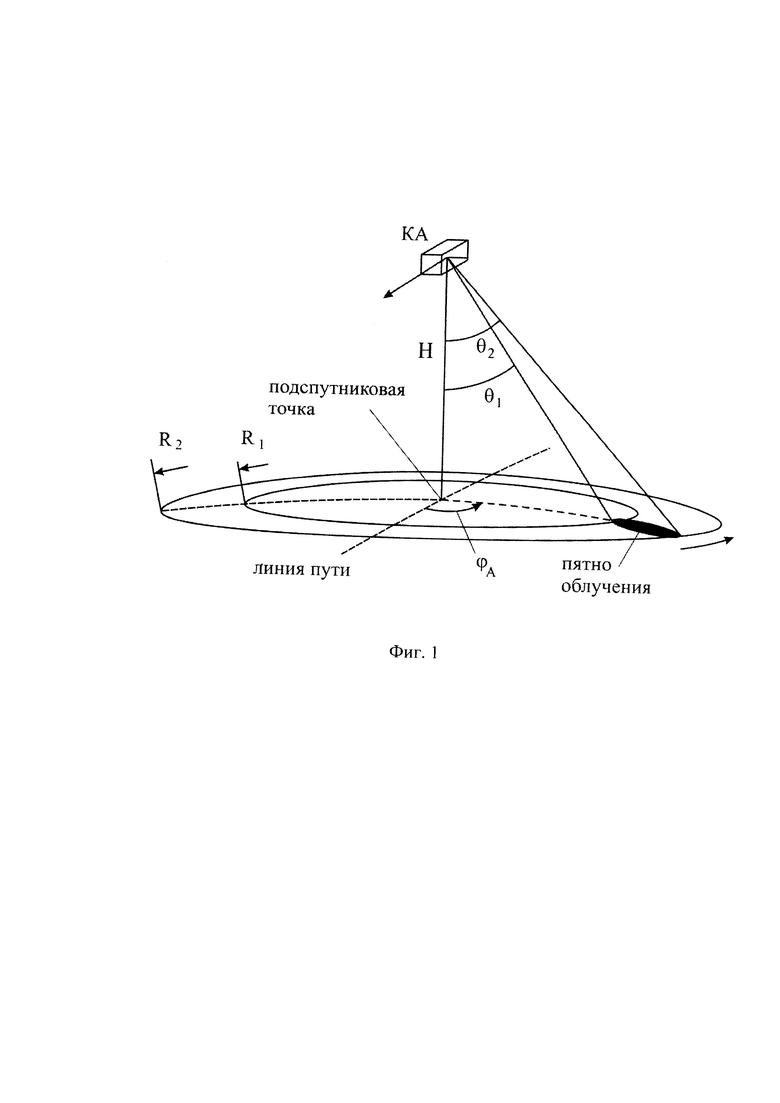
На фиг. 1 приведена схема зондирования поверхности скаттерометром космического базирования.
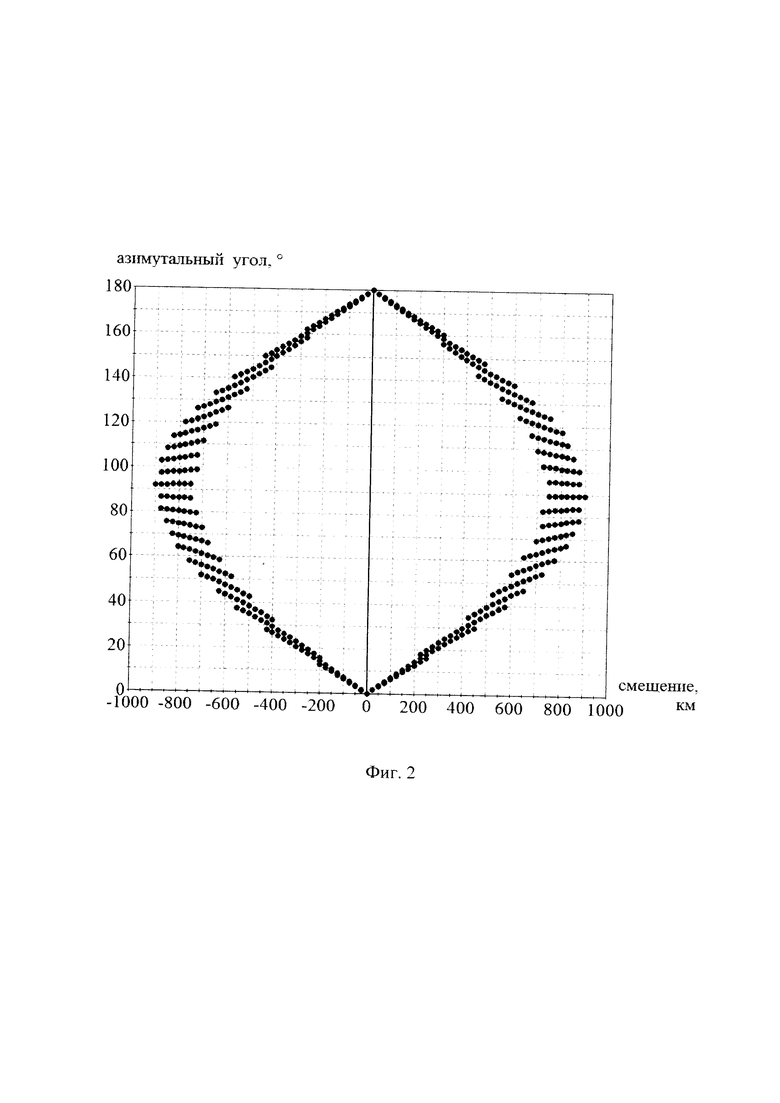
На фиг. 2 показан пример распределения азимутальных углов наблюдения рассеивающих ячеек.
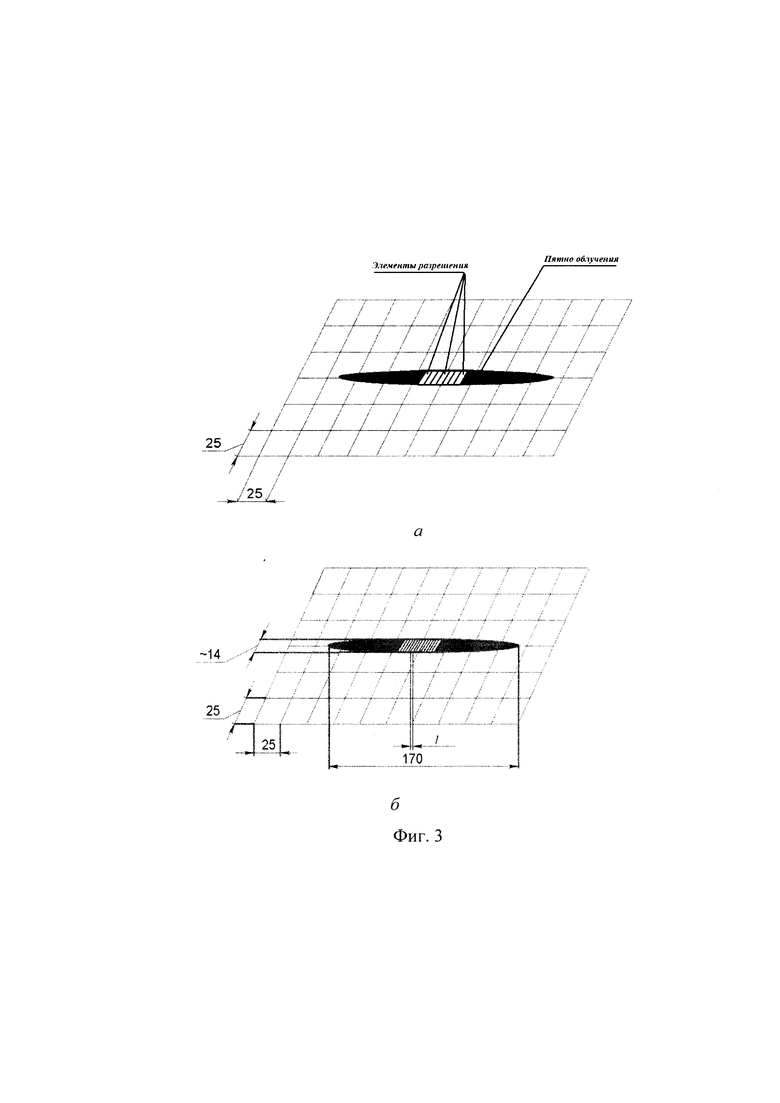
На фиг. 3 показано расположение элементов разрешения в пределах пятна облучения.
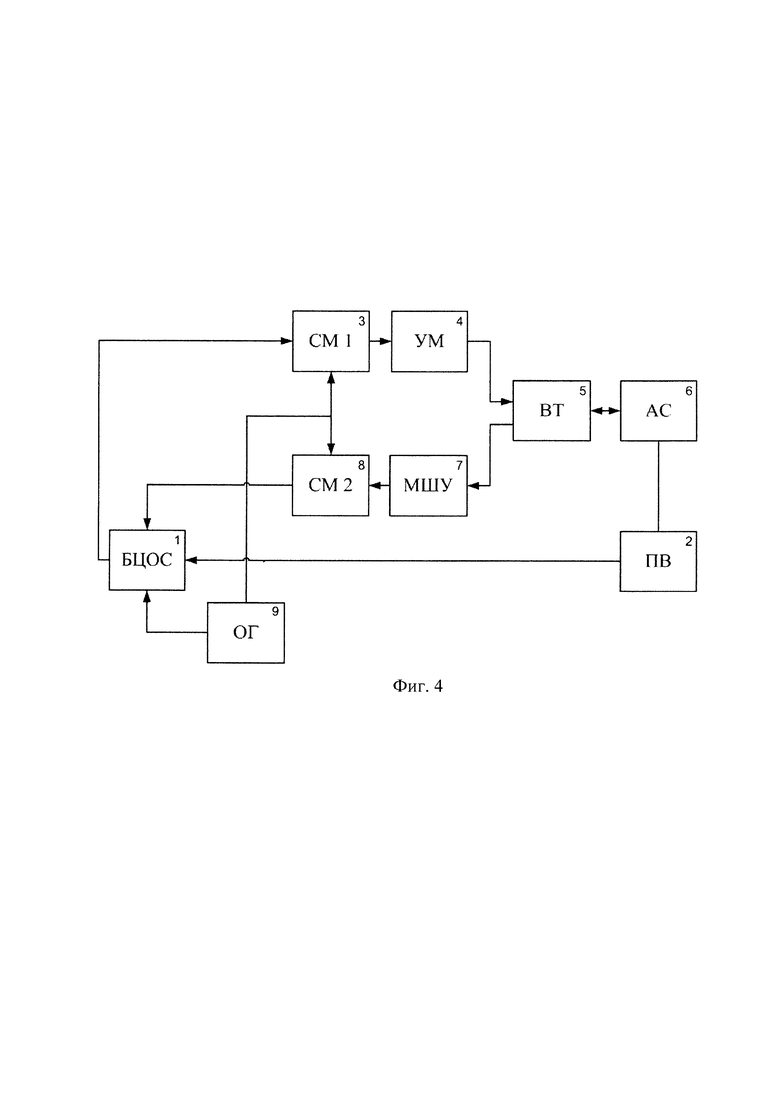
На фиг. 4 приведена структурная схема устройства, реализующего заявляемый способ.
Приведем более подробное описание способа обработки сигнала в скаттерометре Ku-диапазона космического базирования с вращающейся «веерной» диаграммой направленности. Как и в прототипе [4], вращение «веерной» ДН позволяет получать измерения УЭПР морской поверхности под различными азимутальными углами с использованием одной антенной системы при обеспечении непрерывности полосы обзора. Схема зондирования показана на фиг. 1. Как и в прототипе, для улучшения разрешающей способности используются сложные сигналы, в частности ЛЧМ-сигнал. Принятый сигнал умножается на опорный, что позволяет измерять значение УЭПР.
Однако, в отличие от прототипа, при заданных параметрах «веерной» диаграммы направленности изменяют девиацию частоты излучаемого сигнала при постоянной его длительности в зависимости от угла поворота антенны.
При реализации предлагаемого способа выполняют следующую последовательность операций:
- с использованием вращающейся «веерной» ДН, ширина которой в угломестной и в азимутальной плоскостях, угол наклона электрической оси антенны определяются параметрами орбиты и необходимым числом независимых наблюдений элементов разрешения под различными углами, производят излучение, прием отраженных от морской поверхности ЛЧМ-сигналов и их последующую корреляционную обработку;
- при вращении ДН изменяют девиацию частоты излучаемых ЛЧМ-сигналов по закону:
ΔF=ΔF0+ƒd⋅k,
где ΔF0 - средняя девиация частоты;
ƒd - ожидаемый средний допплеровский сдвиг частоты;
k - константа, k≥0, которая зависит от орбитальных параметров движения космического аппарата (КА) и геометрических параметров пятна облучения.
Проведенный сравнительный анализ данного способа и прототипа показывает, что в заявленном способе дополнительно введена операция изменения девиации частоты ЛЧМ-сигнала в зависимости от угла поворота антенны, величина которой определяется значением ожидаемого допплеровского сдвига частоты в зависимости от параметров орбиты.
Рассмотрим более подробно существо заявляемого способа. Как известно, в случае использования результатов измерения УЭПР для восстановления параметров приводного ветра оптимальными углами падения следует считать углы от 30 до 60 градусов [7 - Wentz F., Smith D. A model function for the ocean-normalized radar cross section at 14 GHz derived from NSCAT observations // Journal of Geophysical Research, Vol. 104, No.C5, pp. 11,499-11,514. May 15, 1999]. Это углы, при которых наилучшим образом проявляется зависимость УЭПР от угла между направлением зондирования и направлением приводного ветра. Высота солнечно-синхронной орбиты Н задана, как правило, разработчиком КА и составляет от 600 до 900 км. Расстояние от подспутниковой точки до внешнего края пятна облучения R2 (фиг. 1) соответствует краю полосы обзора. Поэтому значение R2 выбирают максимальным, но таким, чтобы угол падения не превышал 60 градусов. При этом для углов более 50 градусов значение УЭПР для горизонтальной поляризации быстро убывает с ростом угла падения при малых значениях скорости приводного ветра. С точки зрения восстановления слабых ветров с учетом отмеченных выше требований к выбору угла зондирования и использования двух поляризаций для угла θ2, определяющего внешнюю границу пятна облучения (фиг. 1), выбирается значение, близкое к 50 градусам.
Расстояние от подспутниковой точки до внутреннего края пятна облучения R1 выбирают из следующих соображений. Распределение азимутальных углов наблюдений ϕ определяется условием
 ,
,
где γ - смещение от центра полосы обзора в поперечном направлении от линии пути;
R - дальность от подспутниковой точки до точки наблюдения.
Для системы с вращающейся «веерной» ДН
R1≤R≤R2,
-R2≤γ≤R2.
Поэтому все точки для углов наблюдения ϕ лежат между двумя кривыми:
 ,
,
для γ≤R1 и
 ,
,
для R1≤γ≤R2.
Чем больше значение R1, тем меньше наблюдений под различными углами может быть получено. С другой стороны, при этом уменьшается ширина диаграммы направленности антенны, увеличивается коэффициент усиления антенны, и, следовательно, при той же излучаемой мощности увеличивается уровень отраженного сигнала и уменьшается шумовой эквивалент УЭПР. Оптимальная область изменения параметра R1 лежит в пределах 0,75R2≤R1≤0,85R2.
Для уточнения значения R1 учтем, что в скаттерометре [8 - Figa-Saldaña J., Wilson J.J.W., Attema E., Gelsthorpe R., Drinkwater M.R., Stoffelen A. The advanced scatterometer (ASCAT) on the meteorological operational (MetOp) platform: A follow on for European wind scatterometers // Can. J. Remote Sensing - V. 28. - N.3. - 2002. - PP. 404-412.] область, в которой осуществляется эффективное восстановление параметров приводного ветра, лежит в двух полосах, составляющих 550 км каждая. В скаттерометре [9 - Spencer M.W., Wu С, Long D.G. Improved Resolution Backscatter Measurements with the SeaWinds Pencil-Beam Scatterometer // IEEE Transactions On Geoscience And Remote Sensing - V. 38. - N.1. - January 2000. - PP. 89-104.] полоса обзора составляет 1800 км, но эффективное восстановление ветра может осуществляться только в пределах 1150 км. Таким образом, R1 можно выбрать равным 0.85R2.
Необходимый период вращения ДН определяется из условия:
где m=4 - необходимое минимальное число наблюдений под различными азимутальными углами;
νA - скорость перемещения подспутниковой точки по поверхности Земли.
Пример распределения азимутальных углов наблюдения рассеивающих ячеек для R1=730 км, R2=900 км показан на фиг. 2. В этом случае период вращения ТА=10,8 с. Размер элемента полосы обзора, в котором происходит определение скорости и направления ветра, выбран равным 25 км [10 - Satellites oceanography and society / edited by D.Halpern - Elsivier, 2000, 368 p.].
Начальное приближение для направления максимума и ширины ДН в угломестной плоскости выбирают так, чтобы для углов θ1 и θ2 визирования внешнего и внутреннего краев пятна облучения от надира уровень коэффициента усиления антенны относительно максимума был приблизительно равен минус 2,2 дБ. Конкретные значения направления максимума и ширины ДН получают по результатам оптимизации, исходя из критерия максимума минимальной мощности принимаемого сигнала, с учетом изменения дальности и потерь энергии вследствие поворота ДН за время распространения сигнала.
Ширину ДН в азимутальной плоскости выбирают минимально возможной. Она ограничена как максимальным допустимым размером антенной системы, так и допустимым уровнем потерь мощности вследствие поворота ДН за время распространения сигнала.
Длительность зондирующего импульса ограничена сверху временем распространения сигнала до внутреннего края пятна облучения. Ее выбирают максимальной для увеличения энергетического отношения сигнал/шум в принятом сигнале. Период повторения зондирующих импульсов ограничен временем распространения сигнала до внешнего края пятна облучения. Его выбирают минимальным для увеличения количества независимых измерений в каждом элементе полосы обзора.
Для обеспечения необходимого разделения сигнала на соответствующие сигналы, отраженные от различных элементов разрешения, используют ЛЧМ-сигнал. Как и в прототипе, использование ЛЧМ-сигнала обусловлено возможностью полной цифровой обработки сигнала на борту КА при невысоких требованиях к вычислительным ресурсам.
Если пренебречь изменением наклона ЛЧМ-сигнала из-за эффекта Допплера, и учитывать только сдвиг частоты сигнала, то условие равенства АКФ некоторому выбранному уровню, определяющему границу элемента разрешения, можно записать в виде
 ,
,
где τ - длительность зондирующего импульса;
Δƒd(r, ϕ) - допплеровский сдвиг частоты;
Δt(r, ϕ - задержка при распространении сигнала;
ΔF - ширина полосы зондирующего импульса;
r - положение центра элемента разрешения, отсчитываемое от подспутниковой точки вдоль поверхности Земли в угломестном направлении;
р - азимутальное положение центра элемента разрешения.
При длине элемента разрешения вдоль угломестного направления, равной  , расположение элементов разрешения в пределах пятна облучения для случая H=650 км, R2=900 км и размеров ДН 1°×6° показано на фиг. 3. При этом оптимальное значение , соответствующее уровню АКФ минус 3 дБ, составляет 0,31 км. Однако для различных элементов разрешения величина Δϕd(r, ϕ) является различной. Определим взаимосвязь между изменением величины допплеровского сдвига частоты и изменением положения элемента разрешения.
, расположение элементов разрешения в пределах пятна облучения для случая H=650 км, R2=900 км и размеров ДН 1°×6° показано на фиг. 3. При этом оптимальное значение , соответствующее уровню АКФ минус 3 дБ, составляет 0,31 км. Однако для различных элементов разрешения величина Δϕd(r, ϕ) является различной. Определим взаимосвязь между изменением величины допплеровского сдвига частоты и изменением положения элемента разрешения.
Условие, определяющее смещение элемента разрешения по поверхности Земли вдоль угломестного направления на половину его длины, имеет следующий вид:

При линейной аппроксимации вида
можно получить, что

где с - скорость света;
β - угол падения;
L - наклонная дальность до элемента разрешения;
R3 - радиус Земли.
В более общем виде можно записать, что
где k1 и k2 - постоянные коэффициенты.
Отсюда следует, что при изменении допплеровского сдвига частоты меняется длина элемента разрешения. Это обстоятельство не было должным образом учтено в прототипе. Так как ширина элемента разрешения ограничена шириной пятна облучения в азимутальной плоскости и не изменяется при вращении ДН, то для обеспечения минимальной погрешности измерения УЭПР путем сохранения размеров элементов разрешения необходимо девиацию частоты зондирующего импульса изменять по закону:
ΔF=ΔF0+ƒd⋅k,
где ΔF0 - средняя девиация частоты;
ƒd - ожидаемый средний допплеровский сдвиг частоты;
k - константа, которая зависит от орбитальных параметров движения КА и геометрических параметров пятна облучения, k≥0,
 .
.
Допплеровский сдвиг частоты в зависимости от угла поворота антенны с учетом солнечно-синхронной орбиты вычисляют по формуле:
ƒd=ƒ1+ƒ2⋅cos(ϕA6a-ϕА0)+ƒ3⋅cosϕка⋅sin(ϕA6a-ϕА0),
где ƒ1, ƒ2, ƒ3 - константы, имеющие размерность частоты;
ϕАба - угол поворота антенны по измерениям датчиков относительно оси абсцисс СК скаттерометра;
ϕА0 - угол между направлением движения КА в СК скаттерометра и осью абсцисс этой СК;
ϕка - угол возвышения КА, отсчитываемый от плоскости экватора.
ϕА0 определяют по кватернионам ориентации КА в орбитальной СК и ориентации скаттерометра в СК КА. Угол возвышения КА определяют по координатам КА в геоцентрической системе координат ПЗ-90.
Таким образом, все операции по определению требуемых частотных параметров зондирующего сигнала могут быть выполнены на борту КА бортовой аппаратурой скаттерометра.
Ожидаемый средний допплеровский сдвиг частоты так же, как и в прототипе, используют для упреждающей компенсации допплеровского сдвига в зондирующем сигнале. В этом случае в приемном канале сигнал не смещается по частоте.
Опорный сигнал выбирают с той же скоростью линейной частотной модуляции ΔF/τ, что и излучаемый зондирующий импульс.
Для реализации всех операций предложена следующая структурная схема скаттерометра, приведенная на фиг. 4.
В блоке цифровой обработки сигнала (БЦОС) 1 в зависимости от полученного от привода вращения (ПВ) 2 значения угла поворота антенны происходит формирования зондирующего ЛЧМ-сигнала. После формирования зондирующего импульса происходит преобразование вверх частоты сигнала в смесителе (СМ1) 3 и его последующее усиление в усилители мощности (УМ) 4 и передача через волноводный тракт (ВТ) 5 на антенную систему (АС) 6. При приеме отраженного сигнала происходит его усиление в малошумящем усилителе мощности (МШУ) 7, преобразование вниз частоты сигнала в смесителе (СМ2) 8 и последующая оцифровка и корреляционная обработка в БЦОС 1. Гармонический сигнал гетеродина опорного генератора (ОГ) 9 используется для преобразования сигнала в смесителях (СМ1) 3 и (СМ2) 8 и для формирования тактового сигнала в БЦОС 1.
Технический результат достигается путем выбора оптимального размера ДН; обеспечением оптимальных, сохраняющихся при вращении ДН геометрических параметров элементов разрешения за счет:
- упреждающей компенсации среднего допплеровского сдвига частоты ƒd;
- изменения девиации частоты зондирующего ЛЧМ-сигнала по закону
ΔF=ΔF0+ƒd⋅k
где ΔF0 - средняя девиация частоты;
k - константа, которая зависит от орбитальных параметров движения КА и геометрических параметров пятна облучения;
- обеспечения соответствующей скорости линейной частотной модуляции ΔF/τ в опорном сигнале при корреляционной обработке.
Таким образом, в результате введения дополнительной операции изменения девиации частоты ЛЧМ-сигнала в зависимости от угла поворота антенны, величина которой определяется значением ожидаемого допплеровского сдвига частоты в зависимости от параметров орбиты достигают следующий технический результат: уменьшают погрешность измерения удельной эффективной площади рассеяния при условии ограничения излучаемой мощности за счет сохранения при вращении диаграммы направленности геометрических параметров и ориентации элементов разрешения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ селекции протяженных по азимутальной координате воздушных объектов на фоне точечных малоразмерных воздушных объектов | 2024 |
|
RU2835850C1 |
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ С НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ СИГНАЛОМ И СИНТЕЗОМ АПЕРТУРЫ | 2017 |
|
RU2660450C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ УЧАСТКА ЗЕМНОЙ ПОВЕРХНОСТИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ (ВАРИАНТЫ) | 2012 |
|
RU2526850C2 |
| АНТЕННАЯ СИСТЕМА И СПОСОБ ЕЕ РАБОТЫ | 2019 |
|
RU2729889C1 |
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2012 |
|
RU2493530C1 |
| СПОСОБ ЦИФРОВОГО ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ ЛИНЕЙНОЙ ФАР ПРИ ИЗЛУЧЕНИИ ЛЧМ СИГНАЛА | 2011 |
|
RU2533160C2 |
| СПОСОБ И УСТРОЙСТВО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ ПО УГЛОВЫМ НАПРАВЛЕНИЯМ В ОБЗОРНЫХ РЛС | 2011 |
|
RU2480782C1 |
| СПОСОБ СЛОЖНОСОСТАВНОЙ ОПТИМАЛЬНОЙ ФИЛЬТРАЦИИ ДЛЯ ОБНАРУЖЕНИЯ СЛАБЫХ СИГНАЛОВ | 2012 |
|
RU2518443C2 |
| СПОСОБ ПРЕЦИЗИОННОГО ИЗМЕРЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ИЗЛУЧАЮЩИХ И ОТРАЖАЮЩИХ ОБЪЕКТОВ | 2003 |
|
RU2254588C2 |
Изобретение относится к области радиотехники, а более конкретно к способам обработки сигналов при радиолокационном дистанционном зондировании земной поверхности с использованием скаттерометров космического базирования. Техническим результатом является уменьшение погрешности измерения удельной эффективной площади рассеяния при условии ограничения излучаемой мощности за счет сохранения при вращении диаграммы направленности геометрических параметров и ориентации элементов разрешения. В заявленном способе обработки сигналов в бортовой аппаратуре скаттерометра выполняют измерение удельной эффективной площади рассеяния поверхности мирового океана под различными азимутальными углами при помощи излучения, приема и корреляционной обработки зондирующих импульсов СВЧ-диапазона с линейной частотной модуляцией, упреждающей компенсацией среднего допплеровского сдвига частоты при излучении импульса. При этом изменяют девиацию частоты ЛЧМ-сигнала в зависимости от угла поворота антенны при постоянной длительности сигнала по закону ΔF=ΔF0+ƒd⋅k, где ΔF0 - средняя девиация частоты, ƒd - ожидаемый средний допплеровский сдвиг частоты, k - константа, которая зависит от орбитальных параметров движения космического аппарата и геометрических параметров пятна облучения следующим образом. 4 ил.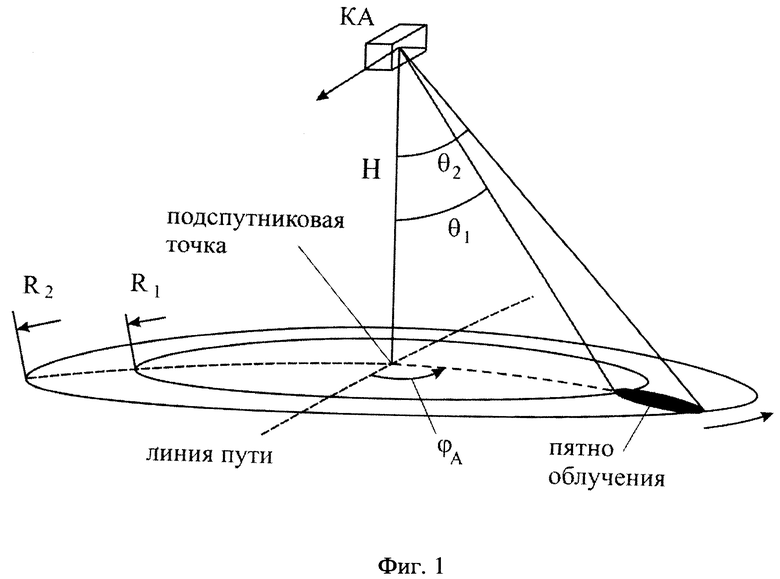
Способ обработки сигнала в скаттерометре Ku-диапазона космического базирования с вращающейся «веерной» диаграммой направленности, при котором измеряют удельную эффективную площадь рассеяния поверхности мирового океана под различными азимутальными углами при помощи излучения, приема и корреляционной обработки зондирующих импульсов СВЧ-диапазона с линейной частотной модуляцией, упреждающей компенсацией среднего допплеровского сдвига частоты при излучении импульса, отличающийся тем, что изменяют девиацию частоты зондирующего сигнала в зависимости от азимутального поворота антенны по закону
ΔF=ΔF0+ƒd⋅k
где ΔF0 - средняя девиация частоты;
ƒd - ожидаемый средний допплеровский сдвиг частоты;
k - константа, k≥0, которая зависит от орбитальных параметров движения космического аппарата и геометрических параметров пятна облучения следующим образом
где τ - длительность зондирующего импульса;
с - скорость света;
β - угол падения;
L - наклонная дальность до элемента разрешения;
RЗ - радиус Земли.
| CN 101363913 A, 11.02.2009 | |||
| WENMING LIN, XIAOLONG DONG | |||
| Design and optimization of a Ku-band rotating, range-gated fanbeam scatterometer // International Journal of Remote Sensing | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Vol | |||
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
| Лыжа для самолета | 1924 |
|
SU2151A1 |
| US 6137437 A, 24.10.2000 | |||
| ПАНОРАМНЫЙ РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ СОСТОЯНИЯ ПРИПОВЕРХНОСТНОГО СЛОЯ ОКЕАНА СО СПУТНИКА | 2010 |
|
RU2449312C1 |
| Способ одновременных полнополяризационных доплеровских измерений в СВЧ-диапазоне | 2021 |
|
RU2771834C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПЕРАТИВНОЙ ДИАГНОСТИКИ ОКЕАНСКИХ ЯВЛЕНИЙ ИЗ КОСМОСА | 2009 |
|
RU2447457C2 |
| ВНОТЧЕНКО С.Л., | |||

