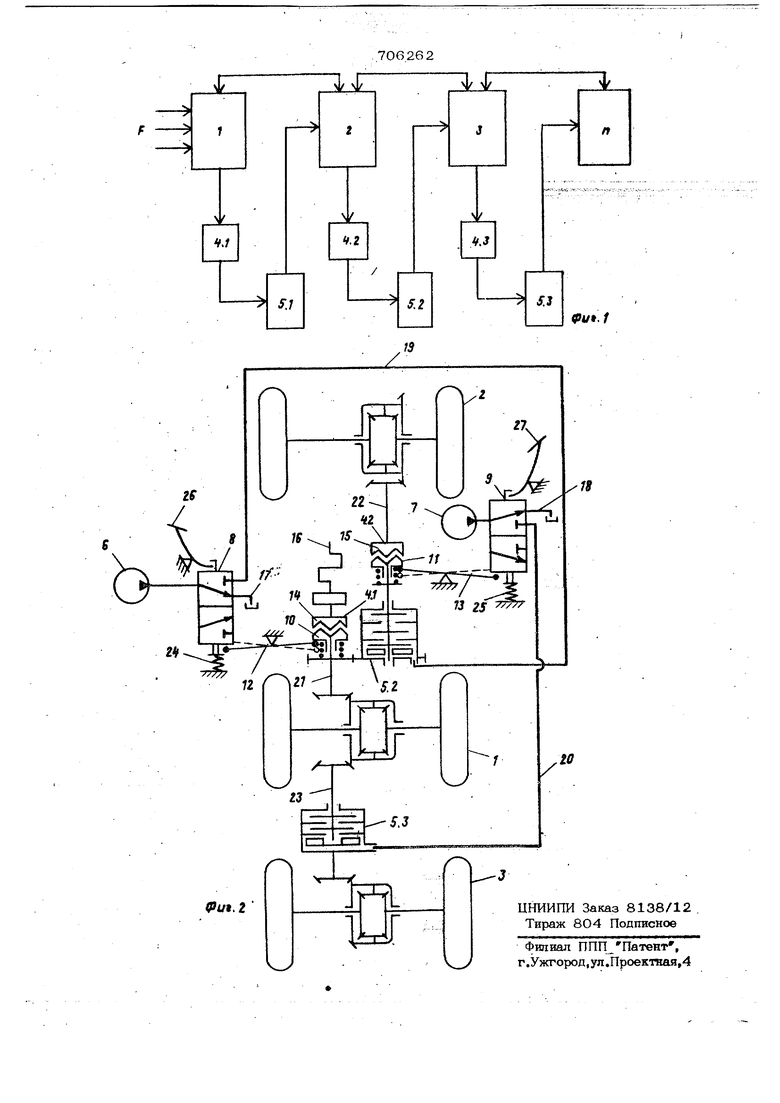
(54) СИСТЕА1А АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИВОДОМ ВЕДУТ ИХ КОЛЕС МНОГООСНОГО ТРАНСПОРТНОГО СРЕДСТВА Фугпяшоишгькая схема предлагаемой системы содержит ведущие мосты 1-3 датчики 4.1, 4.2 и 4.3 нагрунсенности трансмиссии ведущих мостов 1, 2 и 3 соответственно и исполнительные механизмы. 5.1, 5.2 и 5.3 включения ведущих мостов 1,2 и 3 сбответствётшо. При этом на фиг. 1 показаны динамические воздействия на ходовую систему транспортного средства (F ), Конструктивная схема содержит также источники 6.и 7 давления, гидрораспре- делители 8 и 9, вход которых связан с соответствующим источником давления, подвижные кулачковые полумуфты 10 и 1 датчгасов,кшематЕческие связи 12 и 13 гидрораспределителей б и 9 с пойбих нь1ййЁ осевом направлении: кулачковыми , полумуфтами 10 и 11, неподвижные кулачковые полум1фты 14 и 15, вал 16 двигателя транспортного средства, гидролинии 17 и 18 слива и гидролинии 19 и 2О включения исполнительных механигмов 5.2 и 5.3.. - . Ведущие мосты 1,2 и 3 связаны межд собой вала1 1и 21, 22 и 23 трансмиссии. Гидрораспределители 8 и 9 снабжены пружинами 24 и 25 возврата гидрораспределителей в исходное положение и педалями 26 и 27 принудительного включения моетОв. Система автоматтгческого управления .работает следующим образом. При увеличении нагружетшости вала 21 трансмиссии ведущего моста 1, приводимого от вала 16 двигателя, подвижная кулачковая полумуфта 10 датчика 4.1 перемещается и через связь 12 воздействует на гидрораспределитель 8. Последний переме1цается и сообщаеТ источник 6 давления с пздролинией 19, разойдая его при этом с гидрол 1Ш1ей 17 слива. Под ,давлением источника 6 давления исполнительный механизм 5.2 замыкается и вклю чает в работу ведущий мост 2. Если нагруженность продолжает расти, то датчик 4.2, установленный на валу 22 и измеряющий деформацию вала, своей под вижной полумуфтой 11, которая отходит от полумуфты 15, воздействует через связь 13 на гидрораспределитель 9, который сообщает источник 7 давления чере гидролишпо 20 с рабочей полостью исполнительного мехшшзма 5.3 и включает в работу ведущий мост 3. При уменьшении нагружетшости подвижные полуму4)ты 1О и J. 1 датчиков 4.1 и 4.2 перемещаются и смыкаются с неподвижными полум:ут)тами 14 и 15. Гидррраспределители 8 к 9 при этом под действием пружин 24 и 25 возвращаются в исходное полож.ение и сообщают гндролишш 19 и 20 со сливными гидрблиниямк 17 и 18. Давление в рабочих полостях испол штельных механизмов 5.2, , 5i3 падает .и мосты 2 и 3 отклют1аются. Для принудительного включения ведущих мостов необходимо воздействовать на гидрораспределители 8 и 9 нажатием напедали 26 и 27. При этом гидрораспределители перел оцаются и вйтючают все ведущие мосты независимо от положения подвижных полумуфт 10 и 11 датHKifOB 4.1 и 4.2. Система автоматического упрешления приводом многоосного транспортного средства обеспечивает поочередное вгатючение ведущих мостов в зависимости ot HarpySiженности валов трансмиссии, . . Формула изобрете, ния Система автоматического управлегшя приводом ведущих колес многоосного транспортного средства, содержащая датчик нагружейности трансмиссии состоящий из двух кулачковых полумуфт, одна из которых установлена неподвижно, а другйя - подпружинена относительной первой, гидрорайпределитель, вход которого связан с нагнетательной гидролинкей, первый выход - со ставной гидролинией, а золотник кинематически: соединен с подпружиненной полумуфтой, и гидромуфту, установленную в приводе включаемого моста, полость управления которой гидравлически связана со вторым выходом гидрораспределителя, о т л и.ч а ю щ а Я с я тем, что, с целью повыщеиия эффективности системы автоматического управления, она снабжена педалью принудительного включения моста, кинематически связа шой с золотником гидрораспределителя, а датчик нагруженности установлен в приводе ведущего моста. Источники информащш, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 536994, В 60 К 17/ЗО, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоосное транспортное средство | 1979 |
|
SU856870A1 |
| Многоосное транспортное средство | 1979 |
|
SU846332A1 |
| Многоосное транспортное средство | 1986 |
|
SU1342763A1 |
| Транспортное средство | 1986 |
|
SU1397321A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРООБЪЕМНОЙ ТРАНСМИССИЕЙ МНОГОКОЛЕСНОЙ ТРАНСПОРТНОЙ МАШИНЫ | 2004 |
|
RU2264572C1 |
| Система блокировки ведущих осей многоосного транспортного средства с гидрообъемной трансмиссией | 1983 |
|
SU1162627A1 |
| Система управления многоосным транспортным средством | 1980 |
|
SU1065251A1 |
| Колесное транспортное средство | 1981 |
|
SU958150A1 |
| САМОКАТ-ЭКИПАЖ | 2002 |
|
RU2228279C2 |
| Система управления включением зубчатых муфт гидромеханической коробки передач | 1990 |
|
SU1822824A1 |