Настоящее изобретение включает систему регистрации массы груза, висящего на подъемном канате крана, снабженную измерительной системой, предназначенной для измерения усилия в подъемном канате, и вычислительным устройством, предназначенным для определения массы груза по усилию в канате.
Точное определение массы груза, поднимаемого краном, имеет большое значение для решения многих задач: например, масса груза важна для ограничения момента груза у крана, то есть для обеспечения устойчивости крана от опрокидывания и для защиты конструкции. К тому же масса груза имеет большое значение для регистрации данных, связанных с производительностью крана. В частности, путем точного определения массы груза может быть определена общая опрокидывающая нагрузка несущего каната. Кроме того, масса груза также очень важна в качестве параметра для других задач управления краном, таких как, например, гашение качания груза.
Распространенным способом определения массы груза является измерение усилия в подъемном канате. При этом усилие в подъемном канате, по меньшей мере, в статическом состоянии практически соответствует массе груза.
Измерительная система для измерения усилия в канате может при этом располагаться, в частности, непосредственно на грузозахватном средстве. Это расположение на грузозахватном средстве обладает тем преимуществом, что здесь немного посторонних воздействий, и таким образом может быть достигнута большая точность. Недостатком этого решения является, однако, то, что возникает необходимость в электроснабжении и соответствующем сигнальном проводе для грузозахватного средства.
Другую возможность представляет собой расположение измерительной системы в соединительной области между конструкцией крана и подъемным канатом, например, на направляющем роликовом блоке или на подъемном механизме. Преимущество при этом заключается в том, что измерительная система может быть очень надежной, и кабельное соединение является относительно простым. Однако недостатком этого расположения измерительной системы является тот факт, что большее количество посторонних воздействий затрудняет точное определение массы груза по усилию в канате.
При этом уже известно применение медианных фильтров для определения усилия в канате. С одной стороны, его недостаток заключается в том, что приходится мириться с относительно большим замедлением подачи сигнала. С другой стороны, множество посторонних воздействий невозможно исключить посредством медианного фильтра.
Поэтому задачей настоящего изобретения является предоставление системы регистрации массы груза, висящего на подъемном канате крана, которая позволит усовершенствовать определение массы груза по усилию в канате.
Эта задача в соответствии с изобретением решается с помощью устройства по пункту 1. Предлагаемая изобретением система регистрации массы груза, висящего на подъемном канате крана, включает в себя при этом измерительную систему, предназначенную для измерения усилия в канате, и вычислительное устройство, предназначенное для определения массы груза по усилию в канате. В соответствии с изобретением вычислительное устройство снабжено при этом блоком компенсации, который описывает в модели и, по меньшей мере, частично компенсирует воздействие косвенного определения массы груза по усилию в канате.
С одной стороны, при этом можно предусмотреть, чтобы блок компенсации, по меньшей мере, частично компенсировал статические воздействия косвенного определения массы груза по усилию в канате. Для этого в соответствии с изобретением моделируются статические воздействия косвенного определения и компенсируются с помощью блока компенсации. Благодаря этому возможно гораздо более точное определение массы груза, которое вообще было невозможно посредством медианных фильтров, так как они вообще не могут устранить эти статические воздействия.
Альтернативно или дополнительно можно предусмотреть, чтобы блок компенсации, по меньшей мере, частично компенсировал также динамические воздействия косвенного определения массы груза по усилию в канате. И для этого предусмотрено, что блок компенсации моделирует динамические воздействия и компенсирует их при определении массы груза.
Предпочтительно в соответствии с изобретением предусмотрено, что блок компенсации основан на физической модели процесса подъема груза, которая моделирует статические и/или динамические воздействия косвенного определения массы груза по усилию в канате. С помощью этой модели блок компенсации может, по меньшей мере, частично компенсировать эти статические и/или динамические воздействия.
При этом предпочтительно предусмотрено, что блок компенсации работает на основании данных о положении и/или перемещении крана.
В частности, в блок компенсации поступают предпочтительно данные о положении и/или перемещении подъемного механизма, и/или данные о положении и/или перемещении стрелы и/или башни.
Предлагаемая изобретением система применяется при этом, в частности, у поворотных кранов со стрелой, у которых стрела может качаться вверх и вниз вокруг горизонтальной оси качания и поворачиваться вокруг вертикальной оси вращения посредством башни или поворотной конструкции.
Предпочтительно при этом предусмотрено, что измерительная система расположена в соединительном элементе между элементом конструкции крана и подъемным канатом, в частности, на направляющем роликовом блоке или на подъемном механизме. Предпочтительно при этом предусмотрено, что блок компенсации, по меньшей мере, частично компенсирует статические и/или динамические воздействия расположения измерительной системы. Предпочтительно блок компенсации моделирует при этом воздействия расположения измерительной системы на усилие в канате.
Предпочтительно при этом предусмотрено, что блок компенсации включает в себя компенсацию массы каната, которая учитывает собственный вес подъемного каната. Подъемный канат обладает непренебрежимым собственным весом, который благодаря настоящему изобретению больше не искажает определение массы груза. При этом предпочтительно блок компенсации учитывает при расчете массы груза воздействие изменения длины каната при подъеме и/или опускании груза. При изменении длины каната собственный вес подъемного каната, в зависимости от фазы подъема, оказывает различное воздействие на усилие в канате. Предлагаемая изобретением система учитывает это.
Предпочтительно эта система применяется при этом у подъемного механизма, который включает лебедку, при этом угол поворота и/или скорость вращения лебедки используется в компенсации массы каната в качестве входной величины. По углу поворота и/или скорости вращения может быть определена длина каната и/или скорость каната, и таким образом может быть учтено ее воздействие на усилие в канате при расчете массы груза.
Альтернативно длина каната и/или скорость каната может быть также зарегистрирована с помощью измерительного блока. Этот блок может быть, например, отдельно расположен на канате или представлять собой направляющий роликовый блок.
Кроме того, предпочтительно предусмотрено, что компенсация массы каната учитывает собственный вес навитого на лебедке подъемного каната. Это предпочтительно, в частности, тогда, когда измерительная система для измерения усилия в канате расположена на подъемной лебедке, в частности, на опоре, воспринимающей момент подъемной лебедки, так как в этом случае навитый на лебедку канат опирается на измерительную систему и таким образом влияет на результаты измерения.
Кроме того, предусмотрено, что компенсация массы каната учитывает изменяющуюся при перемещении конструкции крана длину и/или ориентацию участков подъемного каната. Это важно, в частности, у таких кранов, у которых свивка подъемного каната при перемещении конструкции крана, в частности при перемещении стрелы, изменяет свою длину или ориентацию. В частности, это происходит тогда, когда канат направляется по крану не параллельно стреле, а когда канат образует со стрелой угол, который изменяется при качании стрелы вверх и вниз. В зависимости от положения конструкции крана, в частности, стрелы, при этом получаются, таким образом, различные длины и/или ориентации участков подъемного каната, что в свою очередь влияет на воздействие собственного веса подъемного каната на выходной сигнал измерительной системы.
Кроме того, предпочтительно предусмотрено, что блок компенсации включает компенсацию с помощью направляющих роликовых блоков, которая учитывает эффекты трения, возникающие при направлении подъемного каната вокруг одного или нескольких направляющих роликовых блоков. Предпочтительно при этом учитывается, в частности, необходимая для направления подъемного каната работа изгиба в качестве эффекта трения. Альтернативно или дополнительно может также учитываться трение качения в направляющих роликовых блоках.
Предпочтительно при этом предусмотрено, что компенсация с помощью направляющих роликовых блоков учитывает направление вращения и/или скорость вращения направляющих роликовых блоков. В частности, направление вращения оказывает при этом немаловажное воздействие на усилие в канате.
При этом при компенсации с помощью направляющих роликовых блоков предпочтительно рассчитываются обусловленные перемещением конструкции крана и перемещением подъемного механизма направление вращения и/или скорость вращения направляющих роликовых блоков. В частности, при многократном изменении направления подъемного каната между башней и стрелой могут возникнуть сложные схемы перемещения, которые соответственно воздействуют на выходной сигнал измерительной системы.
При этом компенсация с помощью направляющих роликовых блоков включает в себя предпочтительно эффекты трения в зависимости от измеренного усилия в канате. Усилие в канате имеет решающее воздействие на эффекты трения. При этом эффекты трения определяются предпочтительно на основании линейной функции измеренного усилия в канате, так как линейная функция представляет собой относительно хорошую аппроксимацию физической ситуации.
Кроме того, у предлагаемой изобретением системы предусмотрено, что блок компенсации учитывает воздействие ускорения массы груза и/или подъемного механизма на усилие в канате при определении массы груза. Ускорение массы груза и/или подъемного механизма образует при этом динамическую компоненту усилия в канате, которая частично компенсируется путем предлагаемой изобретением компенсации. Блок компенсации работает при этом предпочтительно на основании физической модели, которая описывает воздействие ускорения массы груза и/или подъемного механизма на усилие в канате.
Кроме того, предпочтительно предусмотрено, что вычислительное устройство учитывает динамику колебаний, которая возникает из-за растяжимости подъемного каната, при определении массы груза. Дополнительно к ускорениям, которые вызываются ускорениями, индуцируемыми посредством подъемного механизма, система, состоящая из каната и груза, обладает к тому же динамикой колебаний, которая возникает из-за растяжимости подъемного каната. Предпочтительно блок компенсации, по меньшей мере, частично компенсирует эту динамику колебаний. При этом блок компенсации, предназначенный для компенсации динамики колебаний, основан предпочтительно на физической модели.
Предпочтительно вычислительное устройство предлагаемой изобретением системы включает в себя автоматический регистратор массы груза, который основан на упруго-инерционной модели каната и груза. При этом в качестве инерционной составляющей в модели предпочтительно описывается масса самого груза, а также масса грузозахватного средства и упорного средства. В качестве упругой составляющей в модель включен канат между лебедкой и грузозахватным средством.
При этом автоматический регистратор массы груза предпочтительно постоянно сравнивает измеренное усилие в канате с усилием в канате, предсказанным с помощью упруго-инерционной модели по измеренному прежде усилию в канате. На основании этого сравнения автоматический регистратор массы груза оценивает массу груза, которая включается в упруго-инерционную модель каната и груза в качестве параметра. Благодаря этому возможно определение массы груза с высокой точностью и с компенсацией динамических воздействий.
Предпочтительно автоматический регистратор массы груза учитывает при этом шум измерений сигналов измерений. Предпочтительно для этого используется не содержащий средних частот белый шум.
Предпочтительно в качестве сигналов измерений наряду с выходным сигналом измерительной системы для определения усилия в канате используются также данные о длине каната. Предпочтительно при этом в качестве параметра автоматического регистратора массы груза используется усилие в канате, нормированное по допустимой максимальной нагрузке.
Настоящее изобретение включает также кран, снабженный системой для регистрации массы груза, висящего на подъемном канате, как это было изложено выше. При этом кран представляет собой, в частности, кран со стрелой, у которого стрела может качаться вверх и вниз вокруг горизонтальной оси качания. Кроме того, кран может предпочтительно вращаться вокруг вертикальной оси вращения. В частности, при этом стрела шарнирно соединена с башней, которая может вращаться относительно ходовой тележки вокруг вертикальной оси вращения. В частности, кран может представлять собой при этом портовый передвижной кран. Предлагаемая изобретением система может, однако, также применяться у других типов кранов, например, у мостовых кранов или башенных поворотных кранов.
При этом эта система предпочтительно применяется у крана, у которого измерительная система для измерения усилия в канате расположена в соединительном элементе между одним из элементов конструкции крана и подъемным канатом, в частности, в направляющем роликовом блоке или на подъемном механизме. Благодаря этому получается очень надежное расположение, которое позволяет точно определять массу груза с помощью предлагаемой изобретением системы.
При этом благодаря предлагаемой изобретением системе возможно решение множества задач, которые не могли быть реализованы с известными неточными системами. Например, может применяться устройство распознавания ослабления каната, которое с помощью предлагаемой изобретением системы распознает, что груз был опущен вниз. После этого немедленно инициируется отключение подъемного механизма, благодаря которому предотвращается повреждение каната вследствие разматывания канатов. При необходимости при этом можно обойтись без механических выключателей, срабатывающих при ослаблении каната. К тому же теперь возможно также распознавание очень малых нагрузок, таких как, например, пустых контейнеров.
Кроме того, предлагаемая изобретением система обладает большим преимуществом по сравнению с медианными фильтрами, потому что масса груза может быть определена без продолжительного замедления. Благодаря этому обеспечивается более высокая устойчивость против опрокидывания, так как происходит меньше остановов, когда для ограничения грузового момента применяется сигнал массы груза. К тому же увеличивается срок службы крана, так как ограничение момента груза может осуществляться без продолжительного замедления во времени.
Наряду с системой и краном настоящее изобретение включает также способ регистрации массы груза, висящего на подъемном канате, включающий следующие шаги: измерение усилия в подъемном канате; расчет массы груза по усилию в канате; при этом воздействие определения массы груза по усилию в канате описано в модели и, по меньшей мере, частично компенсируется.
В частности, компенсация осуществляется при этом на основании модели статических и/или динамических воздействий этого определения. Благодаря этому эти воздействия могут быть рассчитаны и, по меньшей мере, частично скомпенсированы.
Предлагаемый изобретением способ осуществляется при этом предпочтительно так, как это было изложено выше в отношении системы и крана. В частности, предлагаемый изобретением способ осуществляется при этом посредством системы, которая была описана выше.
Настоящее изобретение поясняется более подробно с помощью примеров осуществления, а также чертежей.
При этом показано:
фиг.1 - пример осуществления предлагаемого изобретением крана,
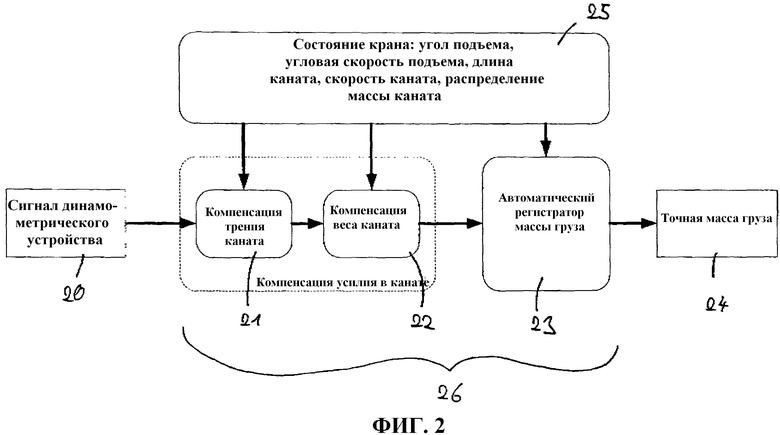
фиг.2 - схематичное изображение примера осуществления предлагаемой изобретением системы и способа,
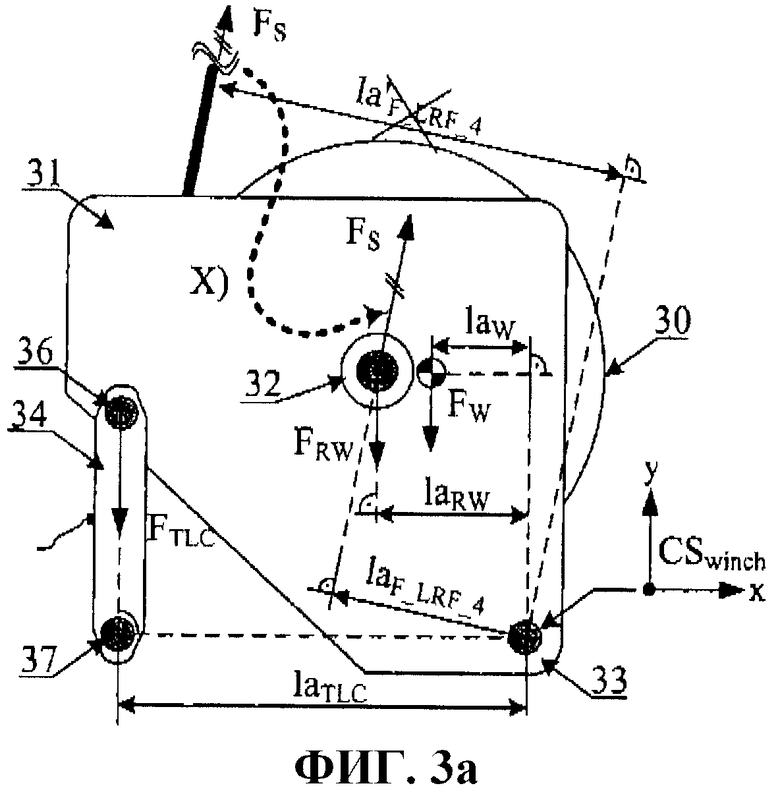
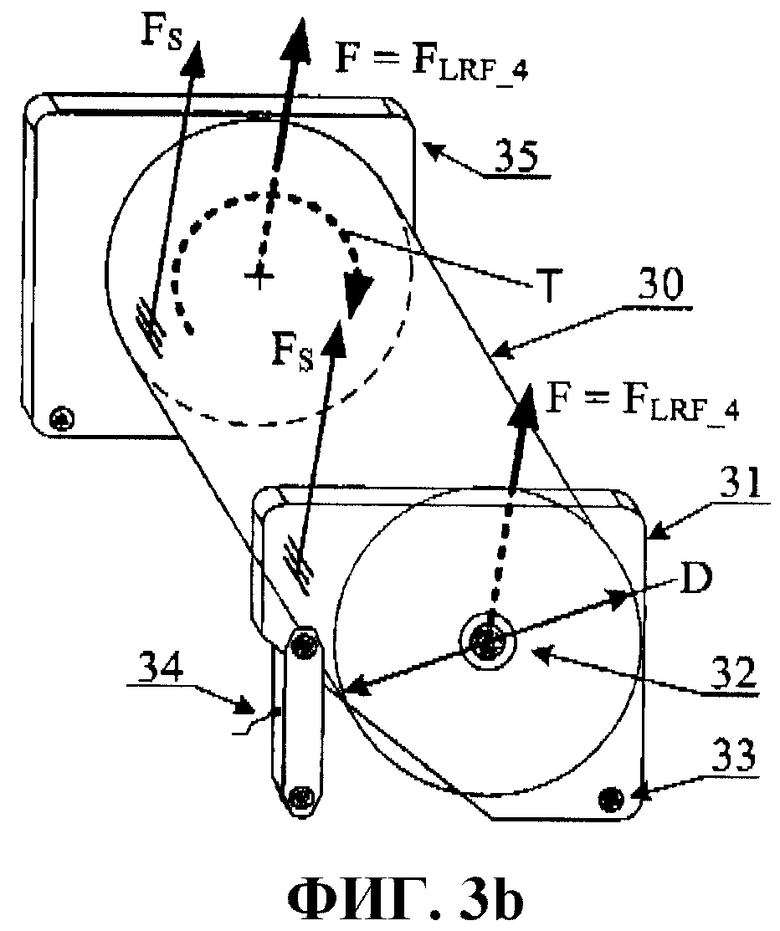
фиг.3a и 3b - расположение измерительной системы на подъемной лебедке,
фиг.4 - расположение измерительной системы на подъемной лебедке и направление подъемного каната через направляющие роликовые блоки,
фиг.5 - изображение усилий, учитываемых при компенсации с помощью направляющих роликовых блоков,
фиг.6 - изображение усилий, учитываемых при компенсации массы каната,
фиг.7 - принципиальное изображение упруго-инерционной модели, которая лежит в основе предлагаемого изобретением автоматического регистратора массы каната, и
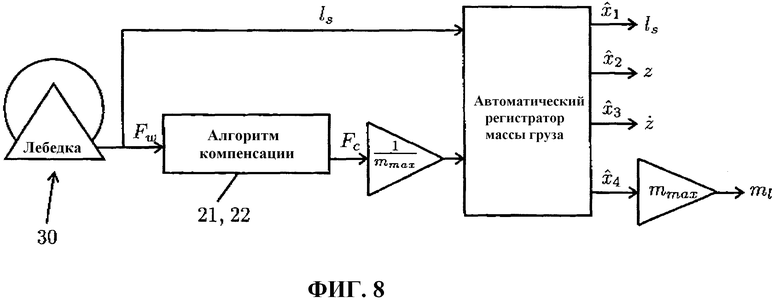
фиг.8 - схематичное изображение примера осуществления предлагаемого изобретением автоматического регистратора массы каната.
На фиг.1 показан один из примеров осуществления предлагаемого изобретением крана, у которого применяется предлагаемая изобретением система регистрации массы груза, висящего на канате крана. Кран представляет собой в данном примере осуществления портовый передвижной кран. При этом кран снабжен ходовой тележкой 1 с шасси 9. Благодаря этому кран может передвигаться в порту. Кроме того, в месте выполнения подъемных работ кран может быть установлен с опорой посредством опорных узлов 10.
На ходовой тележке 1 установлена башня 2 с возможностью вращения вокруг вертикальной оси вращения. К башне 2 шарнирно присоединена стрела 5 с возможностью вращения вокруг горизонтальной оси. Стрела 5 может при этом посредством гидравлического цилиндра 7 поворачиваться в плоскости качания вверх и вниз.
При этом кран снабжен подъемным канатом 4, который проходит вокруг направляющего роликового блока 11, расположенного на конце стрелы. На конце подъемного каната 4 расположено грузозахватное средство 12, с помощью которого может захватываться груз 3. При этом грузозахватное средство 12 или, соответственно, груз 3 поднимаются или, соответственно, опускаются при перемещении подъемного каната 4. Изменение положения грузозахватного средства 12 или, соответственно, груза 3 в вертикальном направлении происходит, таким образом, путем уменьшения или, соответственно, увеличения длины lS подъемного каната 4. Для этого предусмотрена лебедка 13, которая перемещает подъемный канат. Лебедка 13 расположена при этом на поворотной конструкции. Кроме того, подъемный канат 4 проходит сначала от лебедки 13 через первый направляющий роликовый блок 6, расположенный на конце башни 2, к направляющему роликовому блоку 14, расположенному на конце стрелы 5, и оттуда назад к башне 2, где он проходит через второй направляющий роликовый блок 8 к направляющему роликовому блоку 11, расположенному на конце стрелы, откуда подъемный канат сбегает вниз к грузу 3.
Грузозахватное средство 12 или, соответственно, груз 3 могут также перемещаться при вращении башни 2 на угол φD и при качании стрелы 5 вверх и вниз на угол φA в горизонтальной плоскости. Благодаря расположению лебедки 13 на поворотной конструкции при качании стрелы 5 вверх и вниз дополнительно к перемещению груза в радиальном направлении происходит перемещение подъема груза 3. Это перемещение должно быть при необходимости скомпенсировано путем соответствующей настройки лебедки 13.
На фиг.2 показан один из примеров осуществления предлагаемой изобретением системы для регистрации массы груза, висящего на подъемном канате крана. В качестве входной величины системы используется при этом сигнал 20, который подается измерительной системой для измерения усилия в подъемном канате. Этот сигнал передается предлагаемому изобретением вычислительному устройству 26 для определения массы груза. В качестве выходного сигнала вычислительное устройство 26 выдает при этом точную массу груза. При этом вычислительное устройство включает блок компенсации, который, по меньшей мере, частично компенсирует воздействия косвенного определения массы груза по усилию в канате. При этом блок компенсации рассчитывает воздействия на основании данных о состоянии крана, которые передаются устройством 25 оценки состояния крана вычислительному устройству 26. В частности, в вычислительном устройстве используются при этом угол подъема или, соответственно, качания или угловая скорость подъема или, соответственно, качания стрелы. Кроме того в вычислительном устройстве могут использоваться длина каната и/или скорость каната, при этом они, в частности, определяются по положению и/или скорости подъемной лебедки 13.
Блок компенсации основан при этом на физической модели подъемной системы, с помощью которой могут быть рассчитаны воздействия отдельных компонентов подъемной системы на усилие в канате и на массу груза. Благодаря этому блок компенсации может рассчитать и, по меньшей мере, частично компенсировать эти воздействия.
Блок компенсации включает в данном примере осуществления три компонента, которые, однако, могут также применяться независимо друг от друга. Блок компенсации включает при этом, во-первых, компенсацию 21 с помощью направляющих роликовых блоков, которая компенсирует трение каната о направляющие роликовые блоки. Кроме того, блок компенсации включает компенсацию массы каната, которая компенсирует воздействие веса каната на усилие в канате и вместе с тем на массу груза. Блок компенсации включает также автоматический регистратор 23 массы груза, который учитывает динамические помехи сигнала, обусловленные ускорением массы груза или, соответственно, подъемного механизма, и, в частности, такие, которые возникают из-за собственной динамики системы, состоящей из подъемного каната и груза.
Ниже отдельные компоненты предлагаемой изобретением системы описаны в деталях более подробно.
На фиг.3a и 3b изображена подъемная лебедка предлагаемого изобретением крана, на которой расположена измерительная система 34, служащая для измерения усилия в канате. При этом подъемная лебедка 30 установлена с возможностью вращения вокруг оси вращения 32 на двух рамных элементах 31 и 35. На рамном элементе 31 расположена динамометрическая система 34, выполненная в виде воспринимающей момент опоры. При этом рамный элемент 31 шарнирно соединен с краном с возможностью вращения вокруг оси 33. На противоположной стороне рамный элемент 31 шарнирно соединен с краном через динамометрическую систему 34. При этом динамометрическая система 34 выполнена в виде планки и через болтовое соединение 36 соединена с рамным элементом 31, а через болтовое соединение 37 с краном. В качестве динамометрической системы 34 применяется Tension Load Cell (TLC), т.е. динамометрический датчик. Альтернативно возможно также применение в качестве динамометрической системы динамометрического болта или месдозы.
Благодаря расположению динамометрической системы 34 между конструкцией крана и лебедкой усилие FS в канате действует сначала на лебедку, и через раму лебедки на динамометрическую систему, в которой усилие FS в канате вызывает усилие FTLC.
Для расчета усилия FS в канате по измеренному динамометрической системой 34 усилию FTLC необходимо учитывать геометрию расположения динамометрической системы 34 на лебедке. При этом необходимо также учитывать массу самой лебедки, которая опирается на динамометрическую систему 34 и таким образом противодействует усилию в канате.
К тому же при необходимости следует учитывать, что динамометрическая система 34, как показано на фиг.3b, расположена только на одном из двух рамных элементов 31 и 35. Рамный элемент 35 при этом неподвижно соединен болтовым соединением с конструкцией крана. На этом рамном элементе 35 расположен привод подъемной лебедки.
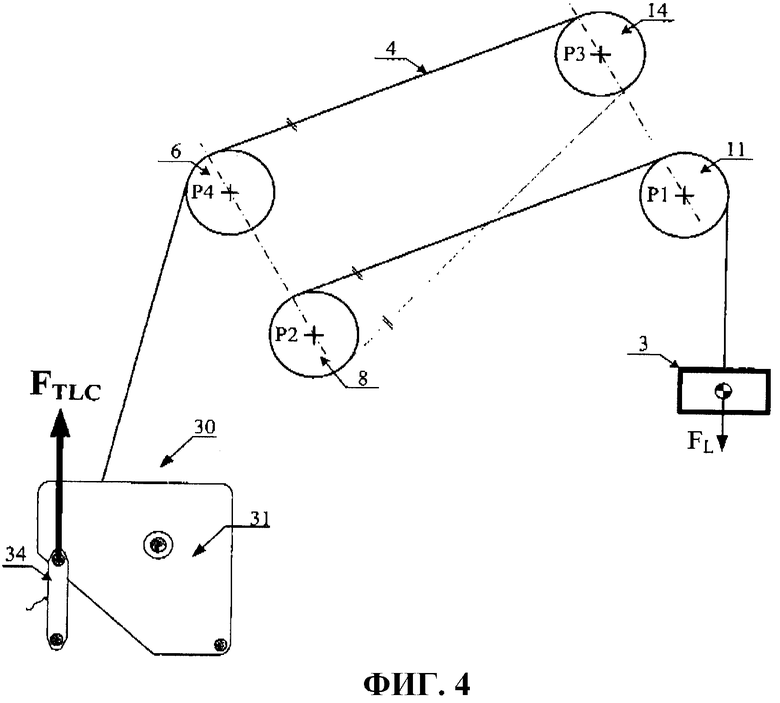
Причем принцип измерения массы груза по усилию в канате или, соответственно, по усилию, которое измеряется измерительной системой 34, а также возникающие при этом усилия еще раз обобщенно изображены на фиг.4.
При этом подъемный канат 4 проходит от лебедки 30 через направляющие роликовые блоки 6, 14 и 8 к направляющему роликовому блоку 11, расположенному на конце стрелы, откуда подъемный канат 4 направляется к грузу 3. Масса груза 3 создает при этом в подъемном канате 4 усилие, которое вводит подъемный канат в лебедку 30. При этом лебедка 30 шарнирно соединена с рамой лебедки и нагружает ее соответствующим усилием. При этом усилие FTLC действует на динамометрическую систему 34, которая соединяет рамный элемент 31 рамы лебедки с конструкцией крана. Так по геометрическим соотношениям подъемного каната, подъемной лебедки, рамы лебедки и динамометрической системы можно по измеренному динамометрической системой 34 усилию найти массу груза.
При расположении измерительной системы в соединительном элементе между конструкцией крана и подъемным канатом возникает, однако, ряд воздействий, которые при отсутствии компенсации приводили бы к значительным неточностям при определении массы груза. Поэтому предлагаемое изобретением вычислительное устройство включает блок компенсации, который компенсирует эти воздействия.
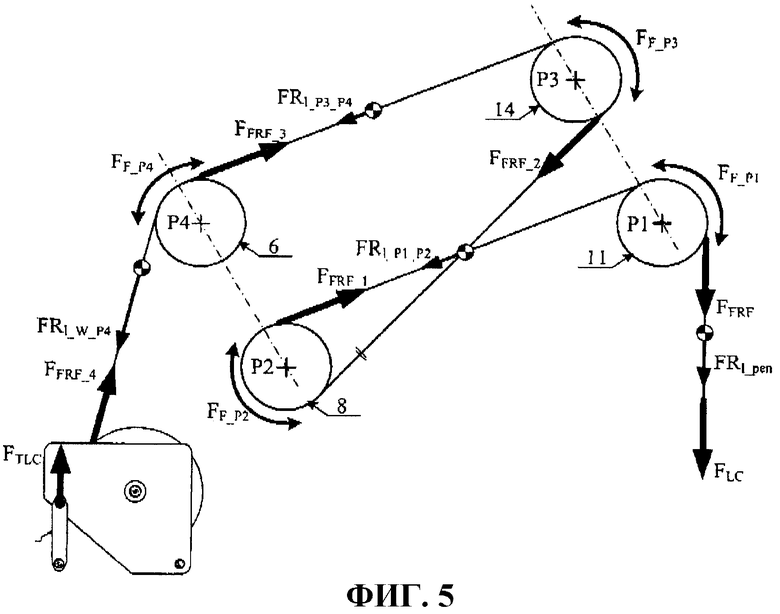
При этом сначала следует подробнее описать с помощью фиг.5 предлагаемую изобретением компенсацию с помощью направляющих роликовых блоков, при которой компенсируются эффекты трения в направляющих роликовых блоках. При этом подъемный канат 4 посредством направляющих роликовых блоков 6, 14, 8 и 11 соответственно изменяет направление под определенным углом. При этом возникает ряд фрикционных воздействий на усилие в канате. При этом в каждом направляющем роликовом блоке возникает сила трения, которая в зависимости от ситуации, в частности, в зависимости от направления вращения направляющего роликового блока увеличивает или уменьшает измеренную измерительной системой силу.
При этом сначала возникает трение качения в опоре направляющего роликового блока, которое определяется в соответствии с кривой Штрибека. Это трение качения, однако, относительно мало, и поэтому им можно пренебречь. Гораздо большее воздействие оказывает угловой сгиб подъемного каната на направляющих роликовых блоках. При этом подъемный канат как при входе, так и при выходе из направляющего роликового блока подвергается деформации, для которой необходима соответствующая работа деформации. При этом величина этого возникающего из-за деформации подъемного каната трения о направляющие роликовые блоки определяется в основном радиусом направляющих роликовых блоков, а также усилием в канате.
При этом измерения показали, что общее трение о каждый направляющий роликовый блок практически направлено по линии усилия в канате. Угловая скорость направляющих роликовых блоков, напротив, оказывает только очень незначительное воздействие на трение. При этом, однако, следует учесть, что трение о каждый направляющий роликовый блок, в зависимости от направления вращения направляющего роликового блока, должно быть либо прибавлено к измеренному усилию в канате, либо вычтено из него. При этом при подъеме груза действует сила трения о направляющие роликовые блоки, направленная против созданной подъемной лебедкой подъемной силы, так что измеренное усилие в канате увеличивается на величину сил трения. При опускании груза подъемным механизмом измеренное усилие в канате наоборот уменьшается на соответствующую величину.
При этом также следует учитывать, что подъемный канат совершает возвратно-поступательное движение между концом башни и концом стрелы, причем два направляющих роликовых блока 6 и 8 расположены на конце башни, и два направляющих роликовых блока 14 и 11 расположены на конце стрелы. Поэтому и при качании стрелы вверх и вниз также возникает перемещение направляющих роликовых блоков 8, 11 и 14, в то время как направляющий роликовый блок 6 без перемещения подъемного механизма не перемещается. Соответственно этому при качании стрелы вверх и вниз возникает сила трения, которая практически соответствует ¾ силы трения при подъеме и опускании груза посредством подъемного механизма.
При этом предлагаемый изобретением блок компенсации компенсирует воздействия, возникающие при трении о направляющие роликовые блоки. Для этого блок компенсации определяет соответственно направление вращения направляющих роликовых блоков по положению и/или перемещению подъемного механизма, а также стрелы. При этом необходимо учитывать, что при комбинированном перемещении подъемного механизма и стрелы могут возникнуть чрезвычайно сложные схемы перемещения направляющих роликовых блоков, так что не все направляющие роликовые блоки входят в усилие в канате с одинаковым знаком. Поэтому компенсация с помощью направляющих роликовых блоков осуществляется предпочтительно по скорости лебедки и скорости подъема стрелы.
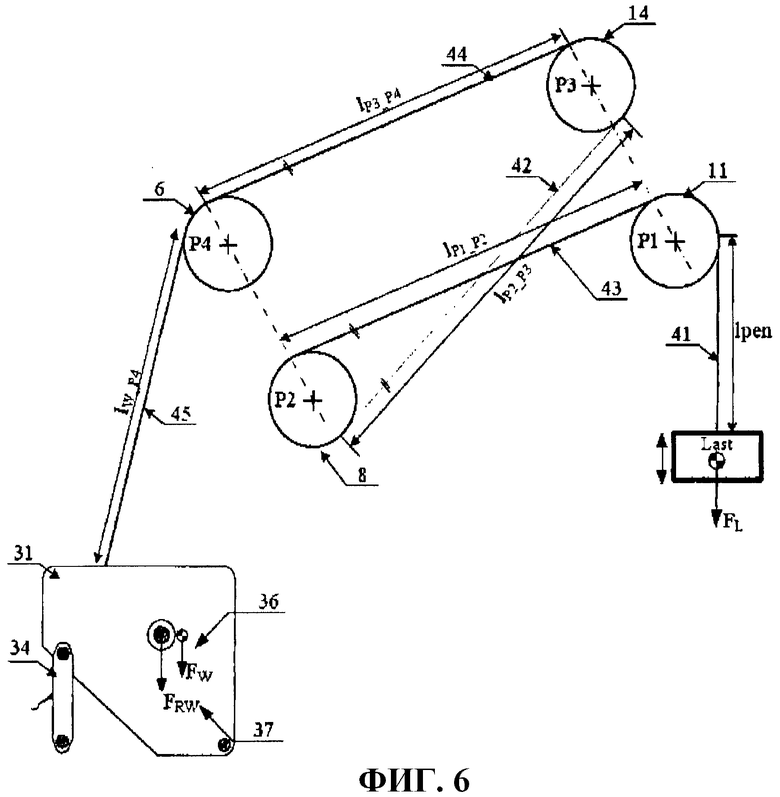
Предлагаемое изобретением вычислительное устройство включает также компенсацию массы каната, которая изображена более подробно с помощью фиг.6. Как уже описано выше, при расчете усилия в канате по сигналу измерения измерительной системы 34 сначала необходимо учесть силу веса FW 36 лебедки, которая опирается на динамометрическую систему 34. На лебедке, однако, дополнительно, по меньшей мере, частично навит подъемный канат. Масса подъемного каната, который навит на лебедке, таким образом, также опирается на динамометрическую систему 34. Поэтому необходимо учесть и силу веса FRW 37 навитого на лебедке подъемного каната. Эта сила может быть, например, определена по углу поворота подъемной лебедки.
Кроме того, массы отдельных участков каната между направляющими роликовыми блоками также влияют на усилие в канате и вместе с тем на определение массы груза. При этом участки 41 и 42 каната увеличивают измеренное усилие в канате за счет массы каната, в то время как участки каната 43, 44 и 45 уменьшают измеренное усилие в канате. В расчете этого воздействия необходимо соответственно рассматривать длину, а также угол участков каната к горизонтали. При этом следует учитывать, что только для участка каната 45 имеется постоянная длина и постоянный угол. Участок 41, напротив, при подъеме и опускании груза изменяет свою длину. Участки 42-44, в свою очередь, при качании стрелы вверх и вниз изменяют как свою длину, так и свою ориентацию. Поэтому компенсация массы каната осуществляется по положению стрелы, а также подъемной лебедки.
Таким образом, при компенсации с помощью направляющих роликовых блоков и компенсации массы каната компенсируется в основном воздействие расположения измерительной системы на подъемной лебедке. Альтернативно расположению измерительной системы на подъемной лебедке можно также интегрировать измерительную систему в один из направляющих роликовых блоков, в частности, в направляющий роликовый блок 8, расположенный на конце стрелы. При этом расположении измерительной системы компенсация опять же осуществляется по описанным выше принципам, при этом, однако, должны быть соответственно скорректированы эффекты трения, а также воздействия массы каната на измеренное усилие, обусловленные другим расположением измерительной системы.
Предлагаемая изобретением система учитывает не только систематические воздействия, которые оказывает расположение измерительной системы на соединительном элементе между конструкцией крана и подъемным канатом на определение массы груза, но и компенсирует динамические эффекты, которые связаны с ускорением массы груза и/или подъемного механизма и растяжимостью подъемного каната.
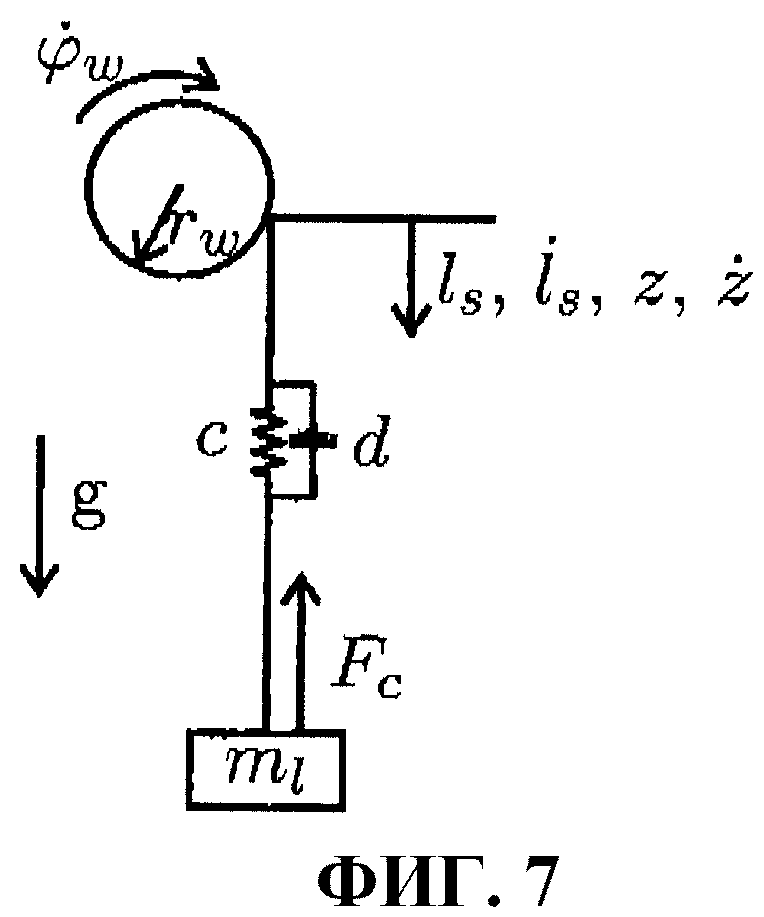
Благодаря эластичности подъемного каната система, состоящая из подъемного каната и груза, образует при этом практически упруго-инерционный маятник, который приводится в действие подъемным механизмом. При этом возникают колебания, которые наложены на статическую составляющую сигнала усилия в канате, соответствующую массе груза. Автоматический регистратор массы груза основан при этом на физической модели упруго-инерционной системы, состоящей из подъемного каната и груза. При этом эта модель схематично воспроизведена на фиг.7. Путем сравнения усилия в канате, получающегося по этой модели, с измеренным усилием в канате автоматический регистратор 23 массы груза оценивает точную массу груза, которая входит в физическую модель в качестве параметра.
Ниже необходимо более подробно описать один из примеров осуществления предлагаемого изобретением автоматического регистратора массы груза, который выполнен в виде расширенного фильтра Кальмана (EKF).
Моделирование ветви подъемного механизма
В приведенном ниже разделе выводится динамическая модель ветви подъемного механизма. Фиг.1 изображает комплектную конструкцию портового передвижного крана (LHM). Груз с массой ml посредством грузозахватного средства поднимается краном и через канат общей длиной ls соединен с подъемной лебедкой. Канат, начиная от грузозахватного средства, направляется через направляющий роликовый блок, расположенный на головной части стрелы и башне. При этом необходимо учитывать, что канат направляется к подъемной лебедке не непосредственно от головной части стрелы, а что он направляется от головной части стрелы к башне, назад к головной части стрелы и затем через башню к подъемной лебедке (см. фиг.1). Таким образом, общая длина каната составляет

где l1, l2 и l3 являются частичными длинами от подъемной лебедки до башни, от башни до головной части стрелы и от головной части стрелы к грузозахватному средству. Ветвь подъемного механизма, состоящая из подъемной лебедки, каната и массы груза, ниже упрощенно моделируется в виде упруго-инерционной демпфирующей системы и изображена на фиг.7.
По закону Ньютона о движении получается, таким образом, уравнение движения для упруго-инерционной демпфирующей системы

где g - ускорение свободного падения, c постоянная упругости, d - постоянная демпфирования, z - положение груза, z` - скорость груза и z`` - ускорение груза. Скорость каната l`s определяется по скорости лебедки φ`w и радиусу лебедки rw

Коэффициент упругости cs каната длиной ls может быть рассчитан по закону Гука

При этом Es и As представляют собой модуль упругости и площадь поперечного сечения каната. Так как у портового передвижного крана ns груз поднимают параллельные канаты (см. фиг.1), получается коэффициент упругости c

Постоянная демпфирования d ветви подъемного механизма определяется

где D постоянная демпфирования Лерше каната.
Так как основная задача автоматического регистратора массы груза заключается в оценке текущей массы груза, для массы груза должно быть введено динамическое уравнение. В рамках этой работы масса ml груза моделируется с помощью процесса случайных блужданий, т.е. для ml создаются помехи в виде аддитивного не содержащего средних частот белого шума. Таким образом, для массы груза получается следующее динамическое уравнение

где η представляет собой не содержащий средних частот белый шум.
Проектирование автоматического регистратора
В этом разделе проектируется автоматический регистратор на базе EKF (3). При этом следует учитывать, что диапазоны значений отдельных величин являются очень разными. Так, длина каната ls и положение груза z обычно составляют от 100 м до 200 м, скорость каната l`s и скорость груза z` от 0 м/с до 2 м/с, а масса груза от 0 кг до 150×103 кг. Кроме того, два параметра Es и As также имеют различные диапазоны значений. Эти различные диапазоны значений могут при оценке автоматического регистратора в режиме он-лайн привести к численным проблемам. Во избежание этих численных проблем для проектирования автоматического регистратора вводится новый параметр

где mmax представляет собой максимальную для соответствующего типа крана допустимую подъемную нагрузку. Кроме того, в автоматическом регистраторе используется не непосредственно масса груза ml, а нормированная масса 
С помощью инкрементального датчика на кране измеряется положение φw лебедки и рассчитывается скорость φ`w лебедки. Динамометрический сенсор выдает измеренное на лебедке усилие Fw в канате. По положению и скорости лебедки можно с помощью уравнения (3) рассчитать длину и скорость каната. Для измеренного на лебедке усилия Fw в канате следует учитывать, что здесь измеряется не только сила по массе груза, но и воздействия трения направляющих роликовых блоков и собственный вес каната. Однако эти посторонние воздействия могут быть устранены с помощью компенсационного алгоритма, и текущая сила упругости FC (сравн. уравнение (2)) может быть рассчитана по измеренному на лебедке усилию Fw в канате.
Для проектирования автоматического регистратора сначала должны быть определены входные величины u и выходные величины y (или измеренные величины) системы. Для имеющейся здесь проблемы в качестве единственного входа системы выбирается скорость l`s каната. В качестве выходных величин выбираются длина ls каната и нормированная сила упругости  .
.
С помощью вектора состояния  динамическая модель, состоящая из уравнений (2), (4), (5), (6), (7) и (8), может быть трансформирована в пространство состояний.
динамическая модель, состоящая из уравнений (2), (4), (5), (6), (7) и (8), может быть трансформирована в пространство состояний.
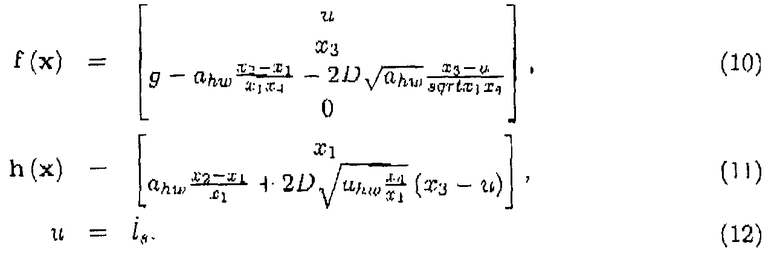
Полученная система дифференциальных уравнений первого порядка выглядит следующим образом:

где
Как упомянуто выше, автоматический регистратор выполняется в виде EKF. EKF представляет собой автоматический регистратор для нелинейных систем с дискретным временем, который минимизирует ковариантность оценочной ошибки 

в каждом шаге времени [3], причем  означает текущее оцениваемое состояние. В уравнении (13) и далее справедливо
означает текущее оцениваемое состояние. В уравнении (13) и далее справедливо  с дискретной частотой считывания ∆t. Так как изображение (9) пространства состояний, однако, представляет собой непрерывную систему, описанная выше система ниже дискретизируется методом [2] Эйлера в обычном порядке.
с дискретной частотой считывания ∆t. Так как изображение (9) пространства состояний, однако, представляет собой непрерывную систему, описанная выше система ниже дискретизируется методом [2] Эйлера в обычном порядке.
Для оценки состояний EKF в каждом шаге времени выполняет один шаг предсказания и один шаг коррекции. В рамках шага предсказания предсказывается состояние для следующего шага времени на основании системы (9) уравнений

Наряду с состояниями системы в рамках шага предсказания предсказывается также матрица ковариантности ошибок

где Pk-1 - матрица ковариантности ошибок к шагу времени (k-1)∆t, Ak - транзитивная матрица линеаризированной системы вблизи текущего состояния, а Qk - дискретная во времени матрица ковариантности системного шума. Ak приближенно рассчитывается с помощью ряда Тейлора экспоненциальной функции матрицы до первого члена

На фиг.8 еще раз показан пример осуществления автоматического регистратора массы груза на блок-схеме. В качестве сигналов измерения в автоматическом регистраторе массы груза наряду с измеренной на лебедке силой Fw используется длина lS каната. При этом измеренная сила, как описано выше, сначала компенсируется в отношении веса каната и эффектов трения и нормализируется по максимально допустимой массе груза mmax. Затем автоматический регистратор массы груза оценивает нормализованную массу груза в виде x4, которая соответственно этому путем умножения на mmax снова пересчитывается в массу груза ml. Наряду с этим автоматический регистратор массы груза оценивает также длину каната lS, положение груза z и скорость груза z`, которые также могут быть использованы для целей управления.
Настоящее изобретение позволяет осуществлять точное определение массы груза, при котором учитываются эффекты расположения измерительной системы, предназначенной для измерения усилия в канате, на соединительном элементе, расположенном между конструкцией крана и подъемным канатом, таком как, например, воспринимающая момент опора подъемной лебедки или направляющий роликовый блок, а также динамические эффекты, которые возникают из-за растяжимости подъемного каната. При этом масса груза может использоваться либо для задач управления, либо для аналитической оценки данных. В частности, масса груза для каждого подъема может сохраняться в блоке памяти, например, банке данных, и таким образом, аналитически оцениваться.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ КРАНОМ ДЛЯ УПРАВЛЕНИЯ ПОДЪЕМНЫМ МЕХАНИЗМОМ КРАНА | 2010 |
|
RU2534694C2 |
| КРАН, А ТАКЖЕ СПОСОБ КОНТРОЛЯ ПРЕДОХРАНЕНИЯ ОТ ПЕРЕГРУЗОК ТАКОГО КРАНА | 2016 |
|
RU2722326C2 |
| КРАН, А ТАКЖЕ СПОСОБ КОНТРОЛЯ УСТРОЙСТВА ПРЕДОХРАНЕНИЯ ОТ ПЕРЕГРУЗОК УКАЗАННОГО КРАНА | 2016 |
|
RU2709322C2 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА СТРЕЛОВОГО ТИПА С МАНЕВРОВОЙ СТРЕЛОЙ | 2006 |
|
RU2319656C1 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И РЕАЛИЗУЮЩИЙ ЕГО ПРИБОР БЕЗОПАСНОСТИ | 2005 |
|
RU2307061C1 |
| РАБОЧАЯ ПЛОЩАДКА И СПОСОБ ЕЕ ПОДВЕСКИ | 1991 |
|
RU2020230C1 |
| КРАН И СПОСОБ УПРАВЛЕНИЯ ТАКИМ КРАНОМ | 2017 |
|
RU2728315C2 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СОСТОЯНИЯ НЕПРИГОДНОСТИ КАНАТА ИЗ ВЫСОКОПРОЧНЫХ ВОЛОКОН, ИСПОЛЬЗУЕМОГО В ГРУЗОПОДЪЕМНОМ МЕХАНИЗМЕ | 2012 |
|
RU2562821C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |
| КРАН | 2010 |
|
RU2532201C2 |
Изобретение относится к системам регистрации массы груза, висящего на подъемном канате крана. Техническим результатом изобретения является повышение точности измерений массы груза. Система регистрации массы груза, висящего на подъемном канате крана, включает: измерительную систему для измерения усилия в канате и вычислительное устройство для определения массы груза по усилию в канате. Вычислительное устройство снабжено блоком компенсации, который описывает в модели и, по меньшей мере, частично компенсирует воздействие косвенного определения массы груза по усилию в канате. Блок компенсации включает компенсацию массы каната, которая учитывает при расчете массы груза собственный вес подъемного каната и, в частности, воздействие изменения длины каната при подъеме и/или опускании груза. 3 н. и 11 з.п. ф-лы, 8 ил.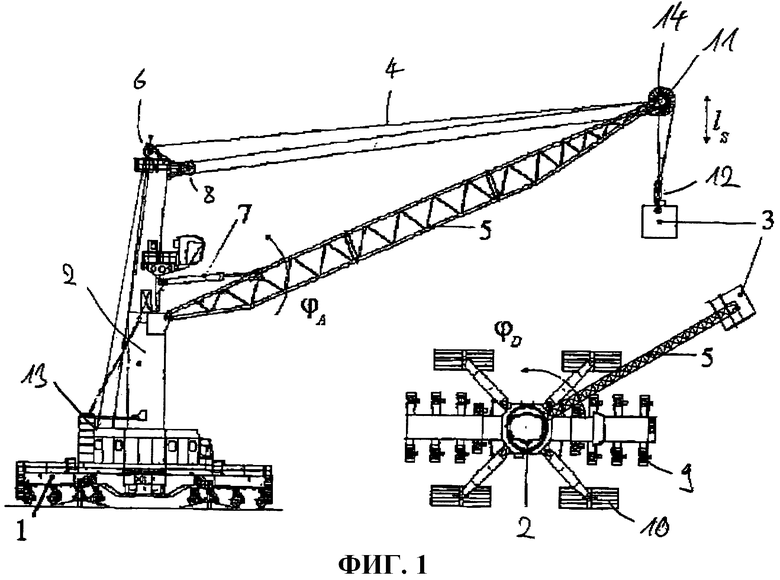
1. Система регистрации массы груза, висящего на подъемном канате крана, которая включает:
измерительную систему для измерения усилия в канате, и
вычислительное устройство для определения массы груза по усилию в канате, причем
вычислительное устройство снабжено блоком компенсации, который описывает в модели и, по меньшей мере, частично компенсирует воздействие косвенного определения массы груза по усилию в канате, отличающаяся тем, что
блок компенсации включает компенсацию массы каната, которая учитывает при расчете массы груза собственный вес подъемного каната и, в частности, воздействие изменения длины каната при подъеме и/или опускании груза.
2. Система по п.1, отличающаяся тем, что блок компенсации работает на основании данных о положении и/или перемещении крана, в частности, на основании данных о положении и/или перемещении подъемного механизма, стрелы и/или башни.
3. Система по п.1 или 2, отличающаяся тем, что она предназначенна для крана, снабженного подъемным механизмом, предназначенным для подъема и опускания висящего на подъемном канате груза, при этом подъемный канат направляется, начиная от измерительной системы, по меньшей мере, через один направляющий роликовый блок крана к грузу, и/или при этом измерительная система, предназначенная для измерения усилия в подъемном канате, расположена на направляющем роликовом блоке или на подъемном механизме, причем блок компенсации, по меньшей мере, частично компенсирует воздействие расположения измерительной системы на результирующую массу груза.
4. Система по п.2 или 3, в которой подъемный механизм включает лебедку, причем угол поворота и/или скорость вращения лебедки используется в компенсации массы каната в качестве входной величины.
5. Система по п.4, в которой компенсация массы каната учитывает собственный вес навитого на лебедке подъемного каната.
6. Система по п.3, в которой компенсация массы каната учитывает изменяющуюся при перемещении конструкции крана длину и/или ориентацию участков подъемного каната.
7. Система по п.1, в которой блок компенсации включает компенсацию с помощью направляющих роликовых блоков, которая учитывает эффекты трения, возникающие при направлении подъемного каната вокруг одного или нескольких направляющих роликовых блоков.
8. Система по п.7, в которой компенсация с помощью направляющих роликовых блоков учитывает направление вращения и/или скорость вращения направляющих роликовых блоков, при этом при компенсации с помощью направляющих роликовых блоков предпочтительно рассчитываются обусловленные перемещением конструкции крана совместно с перемещением подъемного механизма направление вращения и/или скорость вращения направляющих роликовых блоков.
9. Система по любому из пп.7 или 8, в которой компенсация с помощью направляющих роликовых блоков предусматривает расчет эффектов трения в зависимости от измеренного усилия в канате, в частности, на основании линейной функции измеренного усилия в канате.
10. Система по п.1, в которой блок компенсации учитывает воздействие ускорения массы груза и/или подъемного механизма на усилие в канате при определении массы груза.
11. Система по п.10, в которой вычислительное устройство учитывает динамику колебаний, которая возникает из-за растяжимости подъемного каната, при определении массы груза.
12. Система по любому из пп.10 или 11, в которой вычислительное устройство включает автоматический регистратор массы груза, который основан на упруго-инерционной модели, состоящей из каната и груза.
13. Кран, снабженный системой регистрации массы груза, висящего на подъемном канате, по любому из пп.1-12.
14. Способ регистрации массы груза, висящего на подъемном канате, включающий:
измерение усилия в подъемном канате,
расчет массы груза по усилию в канате, при этом воздействие определения массы груза по усилию в канате описано в модели и, по меньшей мере, частично компенсируется, причем определение массы груза происходит посредством системы по любому из пп.1-12.
| US 2002144968 А, 10.10.2002 | |||
| US 2009008351 А1, 08.01.2009 | |||
| Устройство для взвешивания в условиях колебания груза | 1983 |
|
SU1142738A1 |

