Настоящее изобретение относится к крану со стрелой, на котором с возможностью подъема и опускания расположено, по меньшей мере, одно грузозахватное приспособление, причем устройство предохранения от перегрузок содержит средства для распознавания вылета и груза на, по меньшей мере, одном грузозахватном приспособлении, и предусмотрено контрольное устройство для контроля устройства предохранения от перегрузок и средство для определения удерживающей стрелу и/или наведенной в оттяжке стрелы силы натяжения. Далее, изобретение относится также к способу контроля устройства предохранения от перегрузок такого крана.
На кранах, таких как строительные краны, например, самоходные мобильные краны, башенно-поворотные краны или консольные краны с качающейся стрелой, обычно с помощью системы управления краном или встроенного в него устройства предохранения от перегрузок производят контроль нагрузки крана с целью определения достижения предельной нагрузки, что грозит опрокидыванием крана или его повреждением иным образом и последующего своевременного отключения по мере необходимости приводных устройств крана. При этом такое устройство предохранения от перегрузок работает обычно с записанными в память диаграммами нагрузок, которые указывают для соответствующего вылета допустимую нагрузку, причем на кране с помощью датчиков определяют фактический вылет стрелы и сравнивают с допустимой записанной в память диаграммами нагрузки нагрузкой для соответствующего вылета стрелы. При приближении фактического определенного состоянии нагрузки к диаграмме нагрузки или при ее достижении или даже превышении происходит отключение приводов крана устройством предохранения от перегрузок или, по меньшей мере, замедление их работы и/или на индикацию выводится соответствующий предупредительный сигнал. При этом фактическую нагрузку можно определить на основании натяжения подъемного каната с учетом системы запасовки каната, например, с помощью датчика подъемной силы, указывающего приводное усилие канатной лебедки, или также датчиков силы, которыми снабжены направляющие ролики или тали. Вылет стрелы, то есть горизонтальное расстояние от условной оси опрокидывания, в частности, от шарнирной оси или оси качания стрелы, может быть определен различным образом в зависимости от типа крана, например, с помощью датчика положения, который указывает позицию тележки канатной лебедки, или с помощью датчика углового положения, который указывает угол наклона стрелы, или других подходящих датчиков вылета стрелы, причем несколько таких датчиков или средств распознавания могут быть предусмотрены в комбинации друг с другом.
Такое устройство предохранения от перегрузок может, однако, работать точно и надежно лишь в том случае, если названные средства распознавания фактически корректно и точно определяют вылет и нагрузки и не вырабатывают ошибочных величин. В сложных условиях эксплуатации крана может, однако, возникнуть ситуация, при которой, например, происходит смещение датчиков угла, которые должны определять угол наклона стрелы, или средства определения нагрузки неправильно распознают фактическую нагрузку, поскольку они исходят из ошибочной запасовки каната. Если, например, движение грузового крюка происходит с двукратной запасовкой каната, а устройство предохранения от перегрузок исходит из однократной запасовки, то на грузовом крюке подвешен груз, вес которого вдвое больше, чем показывают средства распознавания нагрузки. Вследствие таких ошибок устройство предохранения от перегрузок исходило бы из ошибочных величин применительно к фактическому вылету и/или фактической нагрузке, так что, несмотря на сравнение с допустимой величиной нагрузки для соответствующего вылета стрелы в соответствии с записанной в память диаграммой нагрузки может быть нарушена устойчивость крана.
Во избежание таких ошибочных функций уже предполагалось контролировать устройство предохранения от перегрузок с помощью контрольного устройства и для этого следить за тем, действительно ли фактически индуцированная в оттяжке стрелы сила натяжения соответствует ожидаемой силе натяжения, которую следует ожидать на основании величины вылета и нагрузки, поступающих от датчиков или средств распознавания устройства предохранения от перегрузок. Для этого измеренная в процессе пересчета сила натяжения может быть придана определенным величинам нагрузки и вылета или уравнена тем самым, так что при слишком больших отклонениях можно сделать заключение об ошибочной функции устройства предохранения от перегрузок. Такой процесс пересчета с уравниванием индуцированной силы натяжения с определенными устройством предохранения от перегрузок величинами нагрузки или вылета является, однако, относительно затратным и действительно не может с достаточной точностью и надежностью исключить ошибочные функции при первоначально возникающих в режиме эксплуатации крана изменениях.
Поэтому в основу настоящего изобретения положена задача создания улучшенного крана и улучшенного способа контроля устройства предохранения от перегрузок, которые исключают недостатки уровня техники, при этом должен быть обеспечен точный и надежный в течение длительного времени контроль устройства предохранения от перегрузок и его средств распознавания нагрузки и вылета стрелы без затратных процессов пересчета.
В соответствии с изобретением указанная задача решается с помощью крана в соответствии с пунктом 1, а также способа в соответствии с пунктом 7 настоящего изобретения. Предпочтительные исполнения изобретения являются предметом зависимых пунктов формулы изобретения.
Таким образом, предлагается при уравнивании воздействующих встречно относительно друг друга на кран или стрелу моментов учитывать также возникающий в результате веса стрелы и по мере необходимости других компонентов крана момент собственной массы и производить уравнивание моментов непрерывно также в режиме эксплуатации крана в качестве фонового контроля. В соответствии с изобретением предусмотрено, что контрольное устройство в онлайн-режиме в процессе эксплуатации крана определяет на основании определенного текущим образом усилия натяжения момент натяжения, из определенного текущим образом вылета и определенной текущим образом нагрузки определяет момент нагрузки, при помощи записанных в память данных крана определяет момент собственной массы, уравнивает сумму названного момента нагрузки и момента собственной массы с моментом натяжения и затем, если установленное при уравнивании отклонение превышает порог допуска, выдает сигнал об ошибке и/или сигнал отключения. Если блок оценки определяет, что рассчитанный устройством расчета момент не совпадает с суммой действующих в противоположных направлениях момента нагрузки и момента собственной массы или сильно отличается от этого, то можно исходить из того, что с сенсорной техникой или средствами распознавания устройства предохранения от перегрузок, которые определяют нагрузку и вылет, что-то не в порядке или что устройство предохранения от перегрузок осуществляет ошибочный расчет. При этом может быть определен порог допусков для учета переменных побочных нагрузок, например, силы ветра, дополнительно размещенных на стреле рекламных щитов или других мешающих факторов, как, например, обычные допуски при измерении.
За счет учета также момента собственной массы стрелы и размещенных на ней надстраиваемых частей, таких как талевый канат каретки, дополнительные направляющие ролики или удлинения стрелы в виде качающейся крановой балки контроль можно осуществлять отчетливо более точно и замечать также даже небольшие ошибки, например, обусловленные смещением угловых датчиков, причем за счет определения момента собственной массы с помощью записанных в память данных крана более нет необходимости в дорогостоящем процессе калибровки или пользователь при калибровке, то есть настройке крана не должен более конфигурировать никакие специальные параметры. Необходимые для контроля данные могут быть загружены в полуавтоматическом или автоматическом режиме в фоновую память при наладке крана.
В усовершенствовании изобретения с помощью контрольного устройства можно осуществлять контроль, в частности, также крана с качающейся стрелой и предусмотренного для определения угла наклона стрелы устройства определения угла устройства предохранения от перегрузок. Устройство определения угла может быть при этом выполнено различным образом, например, в виде датчика углового положения, располагаемого в области оси качания стрелы. Альтернативно или дополнительно в качестве устройства определения угла может быть предусмотрен датчик позиции барабана и/или датчик позиции привода, который придан стрелоподъемному механизму и/или определяет позицию каната оттяжки и/или тяги оттяжки стрелы и, таким образом, угол позиции стрелы.
Предпочтительно определенный с помощью устройства определения угла регулировки или качания угол наклона стрелы при этом учитывают как при определении момента нагрузки, так и при определении момента собственной массы, так как измерение угла наклона стрелы может влиять как на вылет грузозахватного приспособления, так и на плечо силы или вылет центра тяжести собственной массы стрелы. Устройство контроля или его устройство расчета момента может рассчитывать момент собственной массы на основании записанных в память данных крана, которые могут содержать вес стрелы, длину стрелы, положение центра тяжести и/или расстояние центра тяжести от оси качания стрелы с учетом углов наклона стрелы или качания. В частности, за счет учета угла качания стрелы можно учитывать то обстоятельство, что с возрастанием угла наклона стрелы плечо силы и, таким образом, момент собственной массы уменьшаются. Аналогичным образом устройство расчета момента может учитывать также для момента нагрузки угол наклона, так как плечо силы или вылет грузозахватного приспособления и, тем самым, возникающий момент нагрузки уменьшаются с возрастанием угла наклона стрелы вверх.
В усовершенствовании изобретения определенный устройством определения угла или датчиком угла качания угол наклона стрелы можно учитывать, однако, не только при расчете момента собственной массы и момента груза, но и при расчете вращающегося в противоположном направлении момента натяжения, так как обычно за счет регулировки угла наклона стрелы происходит также изменение эффективного плеча силы оттяжки.
Предпочтительно контрольное устройство или его устройство расчета момента рассчитывает из соответственно определенного угла наклона стрелы или угла качания плечо силы натяжения на стреле, вылет, по меньшей мере, одного грузозахватного приспособления, а также плечо силы собственной нагрузки стрелы, чтобы затем с дополнительным привлечением соответственно определенной силы натяжения, соответственно определенной нагрузки и записанного в память собственного веса произвести расчет и уравнивание между собой вращающихся по часовой стрелке и против часовой стрелки моментов.
Если кран содержит более одного грузозахватного приспособления, например, в виде первого грузового крюка, который движется от главной части стрелы или от каретки, второго грузового крюка, который движется от удлинения стрелы или так называемой качающейся крановой балки, то для нескольких грузозахватных средств соответственно могут быть определены индивидуальные плечи силы и вылеты с целью более точного определения соответственно выработанных моментов груза.
При назначении плечей силы усилия натяжения, по меньшей мере, одного грузозахватного приспособления и собственного веса контрольное устройство может предпочтительно исходить из того, что плечо силы может относиться к одной общей оси опрокидывания. В частности, контрольное устройство может относить все плечи сил натяжения нагрузки и собственного веса к оси опрокидывания стрелы, в результате чего может быть достигнут несложный и, несмотря на это, достаточно точный расчет моментов. За счет этого привлекаемая для этого модель расчета, которую использует контрольное устройство, отчетливо упрощается без ущерба для точности.
Для расчета моментов можно ориентироваться также на различные или другие оси опрокидывания, например, на основание башни башенно-поворотного крана или расположенную под стрелой опорную точку ходовой тележки. Однако указанный расчет плечей силы относительно оси опрокидывания стрелы ощутимо упрощает расчет моментов.
Указанные выше средства для определения удерживающей стрелу или индуцированную в оттяжке стрелы силы натяжения могут быть выполнены различным образом. Например, в предпочтительном усовершенствовании изобретения канат оттяжки или тяга оттяжки, удерживающая стрелу, может быть снабжена датчиком силы для непосредственного измерения силы натяжения. Альтернативно или дополнительно, по меньшей мере, одним датчиком силы может быть снабжена жесткая расчалка или опора, например, в виде острия башни, через которую проходят канаты оттяжки, для определения индуцированной жесткой расчалкой или опорой силы реакции в анкерной опоре. Альтернативно или дополнительно возможно также снабжать датчиком силы и/или растяжения и/или изгибания структурную часть крана, которая претерпевает соответствующую деформацию вследствие силы натяжения. Например, в случае башенно-поворотного крана в виде верхнеповоротного крана можно определить приложенный к башне изгибающий момент или возникающую в башне изгибающую нагрузку и/или нагрузку растяжения, которая является мерой для момента натяжения или реакции, которые противодействуют моменту нагрузки и моменту собственной массы.
Используемая в контексте настоящего изобретения сила натяжения может подразумевать в этом отношении непосредственно индуцированную в оттяжке стрелы или удерживающую стрелу силу или также взаимосвязанную с этим силу реакции, которая возникает в структурной части крана и является мерой для момента натяжения или момента реакции, которые противодействуют моменту нагрузки и моменту собственной массы.
В последующем изобретения поясняется более подробно на основании предпочтительных примеров исполнения и приложенных чертежей. Фигуры показывают:
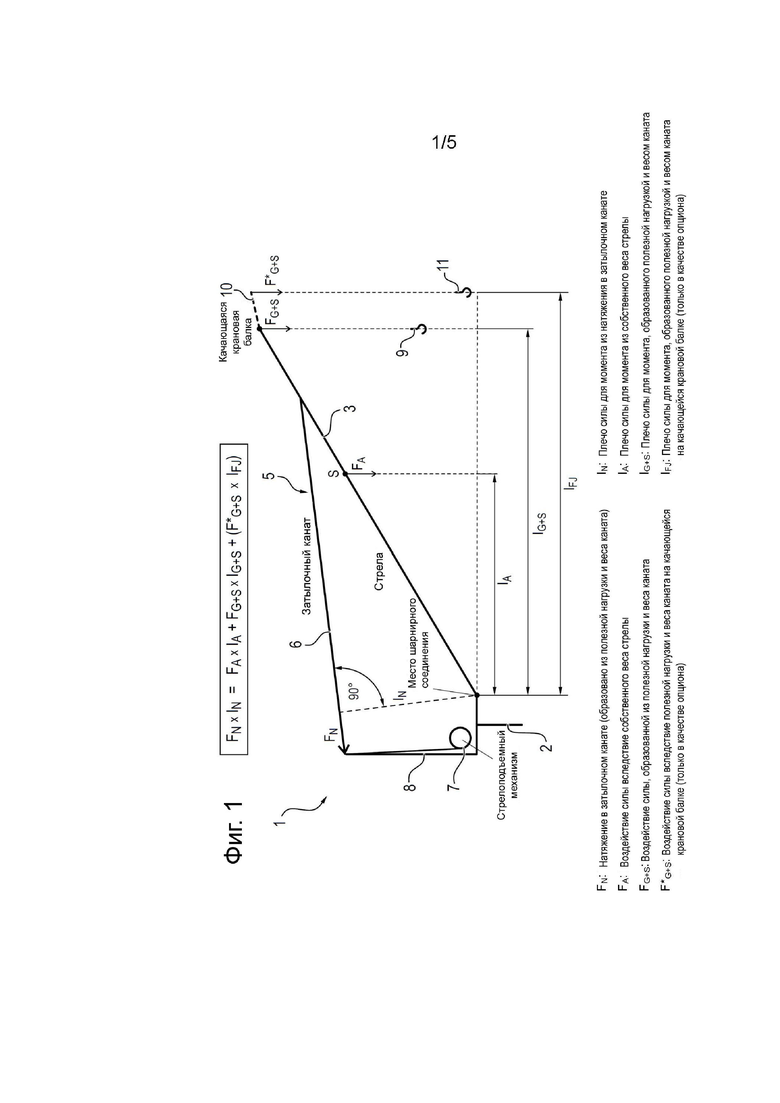
фиг. 1 показывает схематическое фрагментарное изображение башенно-поворотного крана с качающейся стрелой и расположенным на стреле удлинением стрелы в виде качающейся крановой балки, а также воздействующие на стрелу силы и моменты;
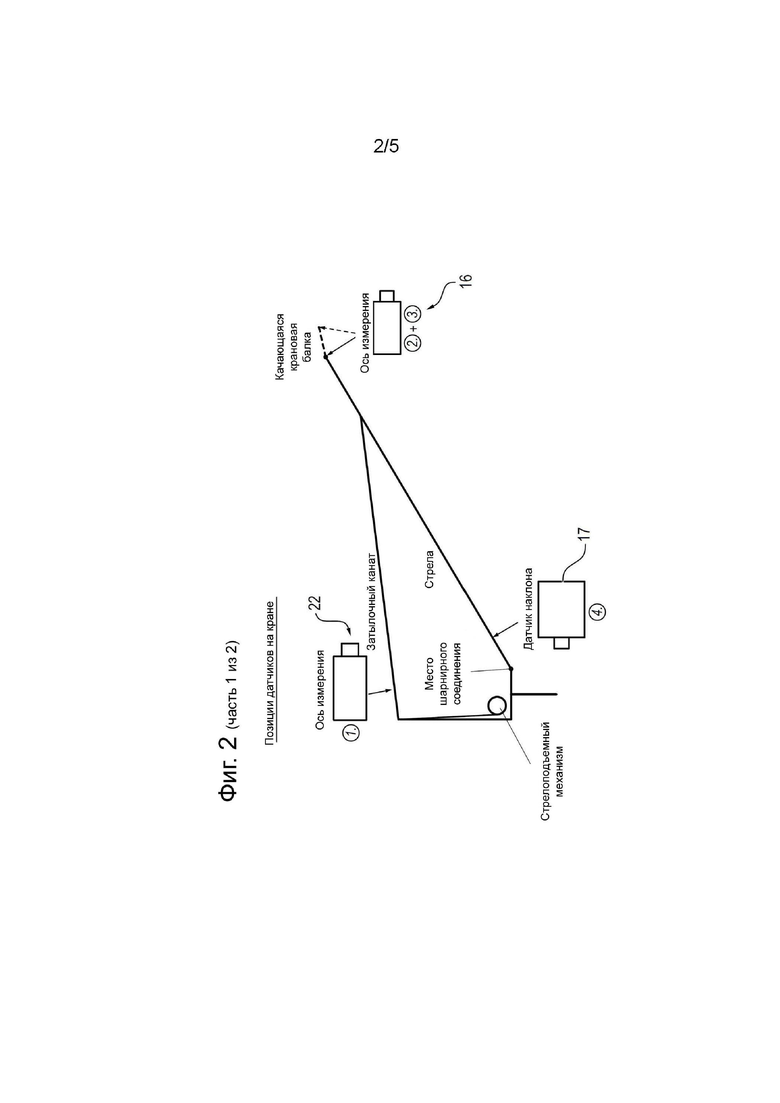
фиг. 2 показывает диаграмму потока данных для пояснения определения величин нагрузки и вылета или плеча силы, произведенного на основании этого расчета момента и уравнивания вращающихся по часовой стрелке моментов с вращающимися против часовой стрелки моментами;
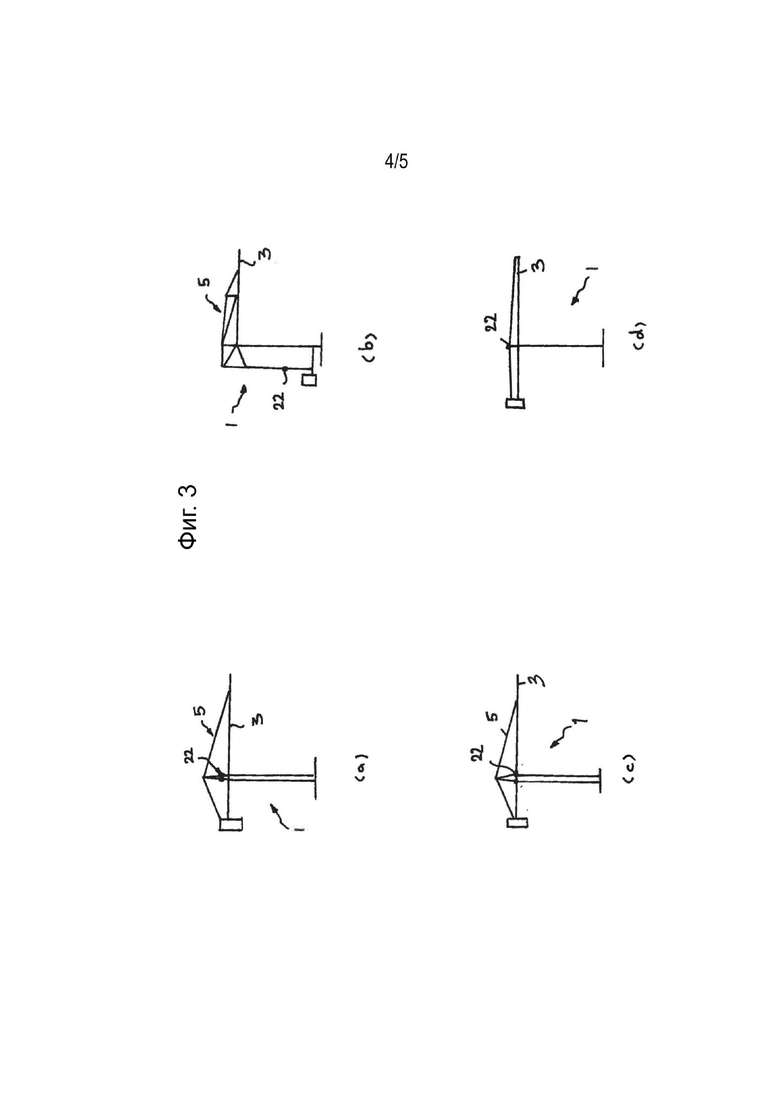
фиг. 3 показывает схематическое изображение различных типов кранов и возможности нанесения средств назначения идентификации усилия натяжения, индуцированного полезной нагрузкой и нагрузкой от собственной массы; и
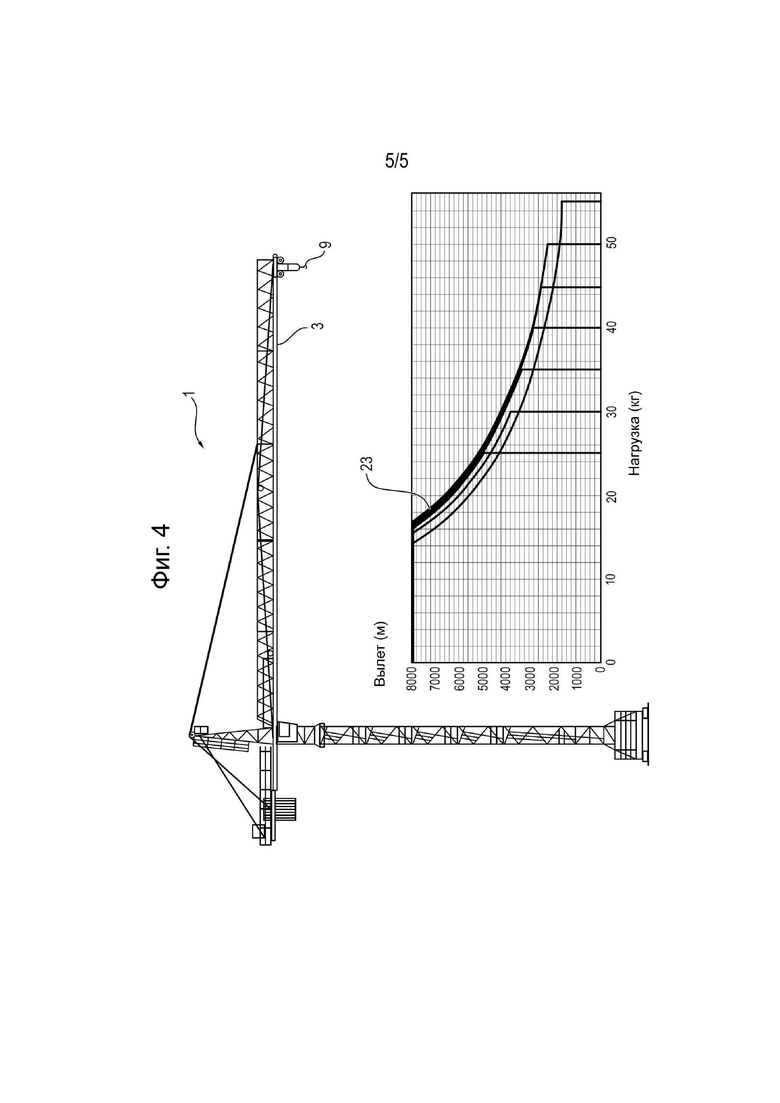
фиг. 4 показывает диаграмму нагрузки устройства предохранения от перегрузок для башенно-поворотного крана с горизонтальной позицией качания стрелы.
Как показывает фиг. 1, кран 1 может быть выполнен в виде строительного крана или башенно-поворотного крана, содержащего башню 2, которая может опираться о поворотную платформу 3, установленную на ходовой тележке, и может поворачиваться вокруг вертикальной оси вращения. При выполнении в виде верхнеповоротного крана башня 2 может быть, однако также стационарно закреплена без возможности вращения. Ходовая тележка может быть выполнена перемещаемой в виде грузового автомобиля, гусеничного шасси или иным образом, однако, может представлять собой также стационарно закрепленное или стационарно подпираемое опорное основание.
Башня 2 может нести стрелу 3, которая может качаться вверх и вниз вокруг по существу горизонтально оси 4 качания, которая может простираться на основании стрелы 3 или между башней 2 и стрелой 3. При выполнении в виде верхнеповоротного крана стрела 3 может к тому же поворачиваться вокруг вертикальной оси, в частности, продольной оси башни вокруг башни 2.
Стрела 3 расчалена с помощью оттяжки 5 стрелы, причем оттяжка 5 стрелы может иметь регулируемый стрелоподъемным механизмом канат 7 оттяжки для обеспечения возможности предпочтительно плавного регулирования угла качания или угла наклона стрелы 3. Канат 7 оттяжки при этом может направляться или отклоняться с помощью лишь обозначенного острия 8 башни, причем, однако, альтернативно или дополнительно могут быть предусмотрены также иные подкосы и, в частности, вместо натяжного троса может быть предусмотрена также анкерная опора.
Как показывает фиг. 1, через соответствующий направляющий ролик в зоне острия стрелы может проходить подъемный канат с шарнирно соединенным грузовым крюком 9, причем грузовой крюк 9 или соединенный с ним подъемный канат может направляться также крановой тележкой, перемещение которой возможно известным по себе образом вдоль стрелы 3.
Как показывает далее фиг 1, на стреле 3 может быть размещено удлинение 10 стрелы в виде качающейся крановой балки, причем от качающейся крановой балки может проходить следующее грузозахватное приспособление в виде грузового крюка 11 на соответствующем подъемном канате.
Как поясняет фиг. 1, на стрелу 3 действуют несколько сил полезной нагрузки и нагрузки от собственной массы, которые обладают различными плечами силы и в соответствии с фиг. 1 прикладывают к стреле 3 вращающиеся по часовой стрелке моменты. Отходящие от стрелы 3 или удлинения 10 стрелы грузовые крюки 9 и 11 в соответствии с фиг. 1 тянут стрелу 3 вниз по часовой стрелке, причем силы FG+S и F*G+S возникают соответственно из закрепленного на грузовом крюке 9 или 11 полезного груза и веса каната и крюка. Горизонтальный вылет сил FG+S и F*G+S определяет их плечо IG+S и IFJ силы относительно оси 4 качания стрелы 3, которую можно рассматривать в качестве оси опрокидывания.
Далее, нагрузка от собственной массы стрелы 3 стремится тянуть эту стрелу 3 с силой FA в соответствии с фиг. 1 вниз по часовой стрелке, причем нагрузка от собственной массы может складываться из собственного веса стрелы 3, собственного веса качающейся крановой балки или удлинения 10 стрелы и по мере необходимости из расположенных на нем дополнительных конструктивных элементов, например, каната крановой тележки, направляющих роликов, прожекторов, лебедок, сервоприводов и других надстраиваемых элементов. Представляющую нагрузку от собственной массы силу FA можно рассматривать при этом как действующую в центре S тяжести, ср. фиг. 1. Нагрузку от собственной массы или силы массы и геометрию стрелы, включая расстояние от центра S тяжести до оси 4 качания, можно хранить в виде данных крана в запоминающем устройстве 12 системы 13 управления краном.
С другой стороны, на стрелу 3 действует сила FN натяжения, которая может быть приложена канатом оттяжки 5 стрелы и которая в соответствии с фиг. 1 стремится тянуть стрелу 3 вверх в направлении против часовой стрелки.
Сила FN натяжения обладает при этом показанным на фиг. 1 плечом IN силы, которое образует проходящую через ось 4 качания прямую перпендикулярно канату 7 оттяжки.
Для удержания стрелы 3 в равновесии сумма всех вращающихся по часовой стрелке моментов должна соответствовать сумме всех вращающихся против часовой стрелки моментов. Применительно к поясненным ранее силам и моментам это означает, что момент натяжения вследствие силы FN натяжения должен соответствовать сумме моментов груза, обусловленных грузовыми крюками 9 и 11 и моментом нагрузки от собственной массы, как это выражено следующим уравнением:
FN x IN = FA x IA + FG+S x IG+S + F*G+S x IFJ
Как видно из фиг. 1, на плечи IA, IG+S и IFJ силы полезной нагрузки и нагрузки от собственной массы, а также плечо IN силы FN натяжения оказывают влияние угол качания или угол наклона стрелы 3, причем плечи IA, IG+S и IFJ сил нагрузки от собственной массы и полезной нагрузки при изменении угла наклона стрелы 3 изменяются отчетливо сильнее, чем плечо IN силы FN натяжения, по меньшей мере, в обычных диапазонах угла наклона стрелы 3, которые могут простираться между горизонтальной ориентацией стрелы 3 и указывающей вверх под острым углом к вертикали ориентацией стрелы 3. Незначительное влияние на плечо IN силы FN натяжения обусловлено в основном геометрией оттяжки стрелы, поскольку угол натяжения каната 6 оттяжки относительно стрелы 3 при качании стрелы 3 изменяется относительно слабо, если стрела 3 обычным по себе образом имеет подходящую большую длину по отношению к высоте острия башни.
Встроенное в систему 13 управления крана устройство 14 предохранения от перегрузок распознает с помощью пригодных средств 15 и 16 распознавания вылет полезной нагрузки FG+S и F*G+S, а также сами полезные нагрузки. Для этого датчик 17 углового положения может распознавать угол качания или наклона стрелы 3, так что на основании записанной в память геометрии крана или геометрических данных стрелы возможно определение вылета, то есть плечей IGS и IFJ. В случае возможности перемещения по стреле 3 крановой тележки может быть дополнительно предусмотрен датчик позиции тележки. С другой стороны, ведущие к грузовым крюкам 9 и 11 подъемные канаты могут быть оснащены датчиками 18 подъемной силы, которые могут быть снабжены приводы подъемных лебедок или подвески направляющего ролика для определения сил подъемного каната. На основе определенных соответствующим образом величин грузов и величин вылета устройство 14 предохранения от перегрузок может производить уравнивание с использованием одной или нескольких диаграмм нагрузок, которые (которая) может (могут) быть записаны в запоминающее устройство системы 13 управления крана. Такая записанная в память диаграмма 23 нагрузки показана в виде примера на фиг. 4.
Далее, для обеспечения фонового контроля устройства 14 предохранения от перегрузок предусмотрено устройство 19 контроля, которое на основании полезной нагрузки и нагрузки от собственной массы FG+S, F*G+S и FA и соответствующих величин вылета или плечей IF+S, IFJ и IA рассчитывает воздействующие на стрелу 3 моменты полезной нагрузки и нагрузки от собственной массы. Все эти моменты полезной нагрузки и нагрузки от собственной массы действуют в направлении часовой стрелки в соответствии с фиг. 1 и фиг. 2.
С другой стороны, устройство 19 контроля или встроенное у него устройство 20 расчета момента производит расчет действующего на стрелу 3 в направлении против часовой стрелки в соответствии с фиг. 1 и фиг. 2 момента натяжения, который складывается из силы FА натяжения и соответствующего плеча IN силы. Как пояснялось выше, при расчете момента, точнее говоря, при определении рычагов силы учитывают угол наклона стрелы 3, который измеряют с помощью датчика 17 углового положения.
После этого блок 21 оценки устройства 19 контроля сравнивает вращающийся в направлении против часовой стрелки момент натяжения с суммой вращающихся в направлении по часовой стрелке моментов нагрузки и нагрузки от собственной массы, ср. фиг. 2. Говоря точнее, блок 21 оценки определяет разность между вращающимся в направлении против часовой стрелки моментом натяжения и суммой вращающихся в направлении по часовой стрелке моментов нагрузки и нагрузки от собственной массы. Если полученная разность превышает определенный порог допусков, блок 21 на основании этого заключает, что устройство 14 защиты от перегрузок, в частности, его средства 15 и 16 распознавания, работают не надлежащим образом.
Блок 21 оценки в таком случае может выдать, с одной стороны, сообщение об ошибке, которое может быть отображено на устройстве индикации в кабине крана и/или устройстве индикации на пульте радиоуправления. С другой стороны, блок 21 оценки может выдавать также сигнал для отключения всех сервоприводов, в частности, привода главного подъемного механизма и/или привода лебедки качающейся крановой балки и/или привода стрелоподъемного механизма.
Порог допусков служит для учета мешающих воздействий, таких как сила ветра, дополнительно размещенные на стрелке рекламные щиты или другие мешающие воздействия, и может быть записан в запоминающее устройство 12 системы 13 управления краном в виде фиксированной, заранее заданной пороговой величины. Альтернативно или дополнительно возможно также согласование пороговой величины допусков с возникающими мешающими воздействиями, например, в зависимости от сигнала измерения скорости ветра, в частности, таким образом, что при отсутствии ветра или незначительном ветре порог допусков снижают, а при усиливающемся, более сильном ветре порог допусков повышают. Представляется возможным согласование пороговой величины допусков в зависимости от других влияющих воздействий.
Как показывает фиг. 2, устройство 19 контроля может определять силу FN натяжения с помощью датчика 24 силы или распознавать ее с помощью датчиков, причем датчиком 24 силы может быть непосредственно снабжена оттяжка 5 стрелы или канат 6 оттяжки. Например, датчик 24 силы может распознавать момент ветра на стрелоподъемном механизме 7, на котором намотан канат 6 оттяжки.
Как показывает фиг. 3, вызванная стрелой 3 и воздействующими на нее полезной нагрузкой и нагрузкой от собственной массы сила реакции или сила натяжения или соответствующий момент реакции может быть определен также с помощью других средств 22 определения. Альтернативно или дополнительно к датчику 24 силы средства 22 определения могут содержать, например, устройство 25 определения силы и/или момента, которое распознает индуцированные оттяжкой стрелы в жесткой расчалке реакции силы и/или моментов, например, в острие 8 башни, ср. фиг. 3 (а). Например, установочные болты или оси острия 8 башни могут быть снабжены датчиками силы или оттяжками или соответствующими структурным частям острия 8 башни устройствами измерения момента или тензометрическими датчиками.
Как показывает фиг. 3 (b), средствами 22 для определения силы натяжения может быть снабжена также вертикальная часть расчалки, которая ведет к поворотной конструкции крана или балласту на основании башни 2.
Как показывает фиг. 3 (d), в случае башенно-поворотного крана без острия башни силу натяжения можно определять с помощью средств 22 определения также в виде оттяжки в верхнем поясе.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН, А ТАКЖЕ СПОСОБ КОНТРОЛЯ УСТРОЙСТВА ПРЕДОХРАНЕНИЯ ОТ ПЕРЕГРУЗОК УКАЗАННОГО КРАНА | 2016 |
|
RU2709322C2 |
| Башенный кран | 1978 |
|
SU775043A1 |
| КРАН | 2017 |
|
RU2734966C2 |
| Кран-манипулятор для монтажа зданий из сборного железобетона | 1984 |
|
SU1203011A1 |
| СИСТЕМА РЕГИСТРАЦИИ МАССЫ ГРУЗА, ВИСЯЩЕГО НА ПОДЪЕМНОМ КАНАТЕ КРАНА | 2010 |
|
RU2537728C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2010 |
|
RU2440924C1 |
| СПОСОБ ИЗМЕНЕНИЯ ВЫЛЕТА СТРЕЛЫ ПОРТАЛЬНОГО КРАНА | 2005 |
|
RU2324642C2 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И РЕАЛИЗУЮЩИЙ ЕГО ПРИБОР БЕЗОПАСНОСТИ | 2005 |
|
RU2307061C1 |
| СПОСОБ НАСТРОЙКИ ЭЛЕКТРОННОГО УСТРОЙСТВА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И ЭЛЕКТРОННОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ С ЕГО РЕАЛИЗАЦИЕЙ | 2006 |
|
RU2326803C2 |
| Башенный кран | 1980 |
|
SU933621A1 |

Предложен кран. Кран содержит стрелу, грузозахватное приспособление, устройство предохранения от перегрузок. Устройство предохранения от перегрузок содержит средства для распознавания вылета и груза на грузозахватном приспособлении и предназначено для уравнивания распознанного груза и выявленного вылета с занесенной в блок памяти диаграммой нагрузки и для отключения и/или замедления работы кранового привода при превышении размера диаграммы нагрузки. Причем предусмотрено контрольное устройство для контроля устройства предохранения от перегрузок, содержащее средства для определения удерживающей стрелу и/или индуцированной в оттяжке стрелы силы натяжения. Контрольное устройство предусмотрено для определения момента (FG+S × IG+S + F*G+S × IFJ) груза на основании распознанного вылета (IG+S, IFJ) и распознанного груза (FG+S, F*G+S), отличающийся тем, что контрольное устройство предназначено определять в онлайн-режиме в процессе эксплуатации крана на основании определенной силы (FN) натяжения момент (FN × IN), при вспомогательном привлечении записанных в память данных крана определять момент (FA x× IA) собственной массы, уравнивать сумму указанного момента (FG+S × IG+S + F*G+S × IFJ) груза и указанного момента (FA × IA) собственной массы с моментом (FN × IN), натяжения и затем, если отклонение момента натяжения, состоящего из указанной суммы момента груза и момента собственной массы, превышает порог допустимого, выдавать сигнал об ошибке или сигнал отключения. Предложен также способ контроля устройства предохранения от перегрузок крана. Достигается улучшенный контроль устройства предохранения от перегрузок. 2 н. и 5 з.п. ф-лы, 4 ил.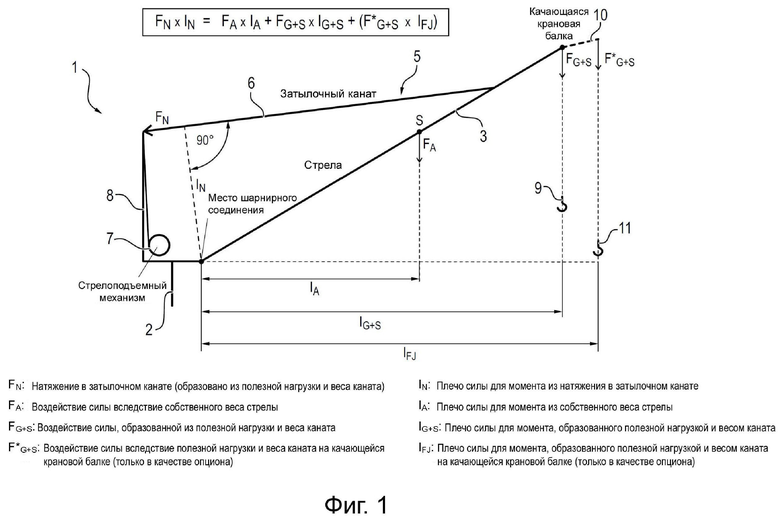
1. Кран со стрелой (3), на которой с возможностью подъема и опускания закреплено, по меньшей мере, одно грузозахватное приспособление (9, 11), причем устройство (14) предохранения от перегрузок содержит средства (15, 16) для распознавания вылета и груза на, по меньшей мере, одном грузозахватном приспособлении (9, 11) и предназначено для уравнивания распознанного груза и выявленного вылета с занесенной в блок памяти диаграммой нагрузки и для отключения и/или замедления работы кранового привода при превышении размера диаграммы нагрузки, причем предусмотрено контрольное устройство (19) для контроля устройства (14) предохранения от перегрузок, содержащее средства (22) для определения удерживающей стрелу (3) и/или индуцированной в оттяжке (5) стрелы силы натяжения, причем контрольное устройство (19) предусмотрено для определения момента (FG+S x IG+S + F*G+S x IFJ) груза на основании распознанного вылета (IG+S, IFJ) и распознанного груза (FG+S, F*G+S), отличающийся тем, что контрольное устройство (19) предназначено определять в онлайн-режиме в процессе эксплуатации крана на основании определенной силы (FN) натяжения момент (FN x IN), при вспомогательном привлечении записанных в память данных крана определять момент (FA x IA) собственной массы, уравнивать сумму указанного момента (FG+S x IG+S + F*G+S x IFJ) груза и указанного момента (FA x IA) собственной массы с моментом (FN x IN), натяжения и затем, если отклонение момента натяжения, состоящего из указанной суммы момента груза и момента собственной массы, превышает порог допустимого, выдавать сигнал об ошибке или сигнал отключения.
2. Кран по п. 1, отличающийся тем, что стрела (3) укреплена с возможностью качания вокруг по существу горизонтальной оси (4) качания, а средства (15) распознавания устройства (14) предохранения от перегрузок для распознавания вылета содержат датчик (17) угла наклона для определения угла (β) наклона стрелы, причем контрольное устройство (19) предназначено учитывать определенный датчиком (17) угол (β) наклона стрелы как при определении момента груза и момента собственной массы, так и при определении момента натяжения.
3. Кран по п. 2, отличающийся тем, что посредством контрольного устройства (19) из определенного датчиком (17) угла (β) наклона стрелы могут быть рассчитаны плечо (IN) силы (FN) натяжения на стреле (3), вылет (IG+S, IFJ), по меньшей мере, одного грузозахватного приспособления (9, 11) и плечо (IA) силы (FA) собственного веса стрелы (3).
4. Кран по любому из пп. 1-3, отличающийся тем, что контрольное устройство (19) предназначено определять плечо (IN) силы (FN) натяжения, вылет (IG+S, IFJ), по меньшей мере, одного грузозахватного приспособления (9, 11) и плечо (IA) силы (FA) собственного веса стрелы относительно одной общей оси качания, в частности, оси (4) качания стрелы (3) и/или рассчитывать относительно указанной общей оси качания.
5. Кран по любому из пп. 1-4, отличающийся тем, что средства (22) для определения силы (FN) натяжения содержат датчик силы, который служит для определения силы натяжения в канате оттяжки или тяге (6) оттяжки и/или которым снабжен канат оттяжки или тяга (6) оттяжки.
6. Кран по любому из пп. 1-5, отличающийся тем, что записанные в память данные крана содержат вес стрелы (3) и/или вес удлинения (10) стрелы или длину стрелы (3) и/или длину удлинения (10) стрелы и/или расстояние центра (S) тяжести стрелы (3) до оси (4) качания стрелы и/или расстояние между центром тяжести удлинения (10) стрелы и осью (4) качания стрелы.
7. Способ контроля устройства (14) предохранения от перегрузок крана (1), посредством которого с помощью средств (15, 16) распознавания определяют действующий на, по меньшей мере, одном грузозахватном приспособлении (9, 11) полезный груз и вылет, по меньшей мере, одного грузозахватного средства и производят сравнение допустимой для соответствующего вылета величины груза, на основании записанной в память диаграммы нагрузок, и при достижении или превышении допустимой величины груза выдается предупредительный сигнал и/или, по меньшей мере, отключается привод крана и/или замедляется его работа, причем устройство (14) предохранения от перегрузок контролируют с помощью контрольного устройства (19) на предмет его нормального функционирования, отличающийся тем, что с помощью контрольного устройства (19) в процессе эксплуатации крана непрерывно рассчитывают из определенной текущим образом силы натяжения момент натяжения, из определенного вылета и распознанного полезного груза рассчитывают момент груза, на основании записанных в память данных крана определяют момент собственной массы, при этом образуется разность между определенным моментом натяжения и суммой названного момента груза и момента собственной массы и при превышении порога допусков названной разностью выдается сигнал об ошибке и/или сигнал отключения.
| Противопригарное покрытие для литейных форм и стержней | 1978 |
|
SU667315A1 |
| СИСТЕМА КОНТРОЛЯ ГРУЗОВОЙ УСТОЙЧИВОСТИ МОБИЛЬНЫХ ГРУЗОПОДЪЕМНЫХ МАШИН | 2004 |
|
RU2267458C1 |
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ СТРЕЛОВОГО КРАНА | 0 |
|
SU368178A1 |

