Настоящее изобретение относится к крану, в частности к поворотному башенному крану, с размещенном на подъемном тросе грузоприемным устройством, приводными механизмами для движения нескольких элементов крана и перемещения грузоприемного устройства, устройством управления приводными механизмами для управления движением грузоприемного устройства вдоль его пути перемещения, а также с устройством подавления маятникового эффекта грузоприемного устройства, причем указанное устройство подавления маятникового эффекта включает блок управления для подачи команд на приводные механизмы в зависимости от релевантных для маятниковых колебаний критериев. Изобретение относится также к способу управления краном, при котором подачу команд на приводные механизмы определяет устройство подавления маятникового эффекта в зависимости от релевантных маятниковых параметров.
Чтобы перемещать грузовой крюк вдоль его пути движения или между двумя конечными точками необходимо задействовать, как правило, различные приводные механизмы и управлять ими. Например, у поворотного башенного крана, у которого подъемный трос спущен с крановой тележки, движущейся по стреле крана, необходимо соответственно задействовать и управлять, как правило, поворотным механизмом для поворота башни с установленной на ней стрелой или стрелы относительно башни вокруг вертикальной оси вращения, а также приводом крановой тележки для перемещения крановой тележки вдоль стрелы и подъемным механизмом, чтобы переставить подъемный трос для подъема или опускания грузового крюка. Указанные приводные механизмы при этом задействует и управляет ими, как правило, машинист крана посредством соответствующих манипуляторов, например, в виде джойстиков, тумблеров, поворотных ручек, ползунков и т.п., что требует, как известно, большого опыта и сноровки, чтобы обеспечить быстрое и в то же время плавное достижение конечных точек без больших маятниковых движений грузового крюка. При условии максимально быстрого движения между конечными точками для высокой производительности труда в конечной точке необходим плавный останов, чтобы грузовой крюк с подвешенным грузом не качался при этом.
Упомянутое управление приводными механизмами крана при необходимой для этого концентрации крановщика утомительно, учитывая частое повторение пути перемещения и монотонность выполняемых задач, например, когда при бетонировании подвешенный на крюке ковш для бетона многократно необходимо перемещать туда и обратно между бетономешалкой для заполнения ковша бетоном и местом бетонирования для выгрузки ковша. Одновременно с падением концентрации или при недостатке опыта работы на соответствующем кране возможно сильное раскачивание принятого груза и, тем самым, возникновение возможной опасности, если крановщик работает с манипуляторами или элементами управления недостаточно тонко.
Чтобы справиться с проблемой нежелательных колебательных движений, уже было предложено оборудовать систему управления краном устройствами гашения маятникового эффекта, включающиеся посредством блока управления в процесс управления и воздействующие на приводные механизмы, например, для предотвращении или ослабления большого ускорения приводного механизма за счет слишком быстрой операции рычажным манипулятором или ограничения определенных скоростей перемещения для более тяжелых грузов, либо аналогичного вмешательства в движение перемещения для предотвращения сильного раскачивания грузового крюка.
Такие устройства подавления маятникового эффекта для кранов известны в разных исполнениях, отличающихся, например, подачей команд на поворотные, качательные и кареточные приводы в зависимости от определенных сигналов датчиков, например угловых сигналов и/сигналов гироскопа. Например, в документах DE 20 2008 018 260 U1 или DE 10 2009 032 270 A1 раскрыты известные гасители колебаний груза на кранах, на объект которых, т.е. на принцип действия которых сделана ясная ссылка. В DE 20 2008 018 206 U1, например, посредством гироскопического блока измеряют угол троса относительно вертикали и его изменение в виде угловой скорости троса, чтобы при превышении порогового значения угловой скорости троса относительно вертикали автоматически внести поправки в управление.
Под названием „Cycoptronic“ также известна система подавления колебаний груза фирмы ЛИБХЕРР для морских кранов, рассчитывающая заранее движение груза и воздействие, например ветра, и инициирующая на основе этих предварительных расчетов компенсационные движения для предотвращения колебаний груза. Конкретно и в этой системе посредством гироскопов фиксируют угол троса относительно вертикали и его изменение для вмешательства в управление в зависимости от сигналов гироскопов.
В случае длинных, узких крановых структур с повышенной расчетной грузоподъемностью, например у башенных поворотных кранов, до сих пор было трудно правильно вмешаться в управление приводами для обеспечения необходимого подавления маятникового эффекта. При этом у структурных элементов, в частности в башне, возникают динамические эффекты и упругая деформация деталей структуры при ускорении или торможении привода, за счет чего, например, торможение или ускорение привода грузовой тележки или поворотного механизма воздействует не напрямую необходимым образом на маятниковое движение грузового крюка. С одной стороны, динамические нагрузки на структурные элементы приводят к задержкам по времени при воздействии на подъемный трос и грузовой крюк, если привода включают для гашения колебаний. С другой стороны, названные динамические нагрузки могут оказать чрезмерное или даже контрпродуктивное воздействие на колебание груза. Например, если груз при сначала слишком быстром задействовании привода грузовой тележки совершает колебание назад в сторону башни, а устройство подавления маятникового эффекта действует в обратном направлении, замедляя привод грузовой тележки, то это может вызвать наклон стрелы вперед, так как башня соответственно деформируется, что снижает необходимое гасящее колебание воздействие.
Исходя из этого, в основу настоящего изобретения положена задача, предложить усовершенствованный кран, а также усовершенствованный способ управления им, чтобы избежать недостатков существующего уровня техники и предпочтительно его усовершенствовать. В частности, необходимо усовершенствовать подавление маятникового эффекта у башенных поворотных кранов с улучшением учета разнообразных воздействий структуры крана.
Согласно изобретению указанную задачу решают посредством крана по пункту 1 формулы и посредством способа по пункту 15 формулы. Предпочтительные варианты осуществления изобретения являются объектом зависимых пунктов формулы.
Таким образом, предложено учитывать при подавлении маятникового эффекта не только собственные колебания троса как таковые, но и динамику стальной конструкции крана и его приводных магистралей. Кран больше не рассматривают в качестве неподвижного твердого тела, преобразующего приводные движения приводных механизмов непосредственно и идентично, т.е. 1:1 в движения точки подвеса подъемного троса. Вместо этого в устройстве подавления маятникового эффекта рассматривают кран в качестве мягкой структуры, обладающей в стальных деталях, например в решетке башни, и в приводных магистралях гибкостью и эластичностью при ускорениях и учитывающей эту динамику структурных элементов крана при подавляющем колебания воздействии на подачу команд приводным механизмам.
Согласно изобретению устройство подавления маятникового эффекта включает средство идентификации динамических деформаций и движений структурных элементов под воздействием динамических нагрузок, причем блок управления устройства подавления маятникового эффекта, определяющий подачу команд на приводные механизмы предназначен для учета определенных динамических деформаций деталей структуры крана при воздействии на подачу команд приводным механизмам.
Устройство подавления маятникового эффекта рассматривает крановую структуру или машинное оборудование не в качестве твердой, так сказать, бесконечно жесткой структуры, а в качестве гибкой, деформируемой и/или податливой и/или относительно мягкой структуры, обеспечивающей кроме осей установочных движений оборудования, например оси качания стрелы или оси вращения башни, движения и/или изменение положения за счет деформирования структурных элементов.
Учет подвижности машинной структуры вследствие деформирования структуры под действием динамических нагрузок имеет значение именно у вытянутых, узких и преднамеренно выполненных с учетом статических и динамических пограничных условий, – но с учетом необходимой безопасности, – например, у башенных поворотных кранов, так как существует значительная дополнительная доля движений, например стрелы и, тем самым, изменение положения грузового крюка за счет деформирования структурных элементов. Такие деформации и движения структурных элементов под действием динамических нагрузок учитывают для более эффективного подавления маятниковых колебаний.
При этом достигаются значительные преимущества:
для начала снижают динамику колебаний структурных элементов за счет регулировочных характеристик системы управления. При этом за счет изменения характера движения активно гасят колебания или даже не допускают их.
Для стальной конструкции также снижают нагрузки и не подвергают большим нагрузкам. В частности, способ регулирования снижает ударные нагрузки.
Кроме этого таким способом определяют воздействие характеристик движения.
Знание динамики структуры и способ регулирования снижают и гасят, в частности, продольные колебания. Это обеспечивает устойчивое положение груза и исключает его дальнейшие колебания при остановке.
Указанные гибкие деформации и движения структурных элементов и приводных тросов и возникающие вследствие этого внутренние движения можно принципиально и самым разным способом идентифицировать. В усовершенствованном варианте изобретения указанные средства идентификации включают блок оценки, который оценивает деформации и движения машинной структуры под действием нагрузок, возникающих в зависимости от фазы введенных команд управления и/или в зависимости от определенных управляющих действий приводных механизмов и/или в зависимости от характера ускорения приводных механизмов с учетом данностей, определяющих характеристику структуры крана.
Такой блок оценки использует, например, модель данных, в которую заложены параметры структуры крана, например высота башни, длина стрелы, жесткость, площадные инерционные моменты и т.п. и/или связаны друг с другом, чтобы на основе фактической грузовой нагрузки, т.е. веса принятого на грузовой крюк груза, и фактического вылета стрелы оценить динамические эффекты, т.е. деформации в стальной конструкции и в приводных магистралях для определения действия приводного механизма. В зависимости от такой оценки динамических нагрузок устройство гашения маятникового эффекта включается в подачу команд на приводные механизмы и определяет установочные параметры приводных механизмов для предотвращения или снижения колебательных движений грузового крюка и подъемного троса.
В частности, блок оценки имеет для определения таких структурных деформаций вычислительный блок, высчитывающий эти структурные деформации и вытекающие из них движения структурных элементов на основе заложенной модели вычисления в зависимости от введенных в кабине управления команд управления. Такая модель выполнена по принципу модели конченых элементов или является моделью конечных элементов, причем, однако, предпочтительно используют явно более простую по сравнению с моделью конечных элементов модель, определяемую, например, эмпирически путем фиксирования структурных деформаций после определенных команд управления и/или нагрузочных ситуаций на реальном кране или оборудовании. Такая модель работает, например, с таблицами, в которых деформации соотнесены с определенными командами управления, причем промежуточные параметры команд управления пересчитывают посредством устройства интерполяции в ответствующие деформации.
Альтернативно или дополнительно к оценке или расчету гибких деформаций и динамических движений структурных элементов устройство подавления маятникового эффекта включает также соответствующую систему датчиков, фиксирующих такие гибкие деформации и движения структурных элементов по действием динамических нагрузок. Эта система датчиков включает, например, датчики деформирования в виде тензорезисторов на стальной конструкции крана, например на ферменной конструкции башни и/или стрелы. Альтернативно или дополнительно устанавливают датчики ускорения и/или скорости для фиксирования определенных движений структурных элементов, например ныряние окончания стрелы и/или вращательные динамические эффекты стрелы. Альтернативно или дополнительно устанавливают также датчики наклона или гироскопы, например, на башне, в частности на ее верхнем отрезке, где установлена стрела, чтобы фиксировать динамику башни. Например, подъемные движения рывками вызывают ныряние стрелы, сопровождаемое изгибанием башни, причем резонансные колебания башни вызывают, в свою очередь, ныряние стрелы, сопровождаемое соответствующим движением грузового крюка. Альтернативно или дополнительно датчики движения и/или ускорения устанавливают и на приводных магистралях для фиксирования динамики приводных магистралей. Например, на направляющих роликах подъемного троса грузовой тележки и/или на направляющих роликах тросовой оттяжки наклонной стрелы устанавливают датчики углового положения для фиксирования фактической скорости троса в релевантных точках.
Предпочтительно и на приводных механизмах устанавливают соответствующие датчики скорости и/или ускорения для соответствующего фиксирования приводящих движений приводных механизмов и для соответствующего соотнесения их с оцененными и/или зафиксированными деформациями структурных элементов, например стальной конструкции, и приводных магистралей.
В частности, устройство подавления маятникового эффекта в усовершенствованном варианте изобретения включает блок фильтров или регистратор, фиксирующий реакцию крана при определенных установочных параметрах приводных регуляторов и определяющий на основе зафиксированной реакции крана установочные параметры приводных регуляторов с учетом заданных закономерностей динамической модели крана, которая может быть принципиально разной и которую получают путем анализа и симуляции стальной конструкции.
Такой блок фильтров или регистратор выполнен, в частности, в виде т.н. фильтра Кальмана, на который в качестве входных параметров заводят установочные параметры регуляторов крановых приводов и движения крана, в частности движения грузового крюка, в частности его колебания, и который на основе этих входных параметров и уравнений Кальмана, моделирующих динамическую систему структуры крана, в частности его стальной конструкции и приводных магистралей, соответствующе определяет установочные параметры приводных регуляторов для обеспечения необходимого подавления маятникового эффекта.
В частности, посредством соответствующих датчиков фиксируют положение грузового крюка, в частности и его угол отклонения от вертикали, т.е. отклонение от вертикали подъемного троса, и заводят их в фильтр Кальмана. Блок фиксации положения грузового крюка предпочтительно включает визуализирующие датчики, например камеру, направленную из точки подвеса подъемного троса, например грузовой тележки, главным образом вертикально вниз. Устройство обработки изображения идентифицирует на основе предоставленного визуализирующим датчиком изображения грузовой крюк и его положение или определяет его смещение от центра изображения, характеризующее параметр отклонения крюка крана от вертикали и, тем самым, маятниковое колебание груза.
Датчики положения предназначены, предпочтительно для фиксирования положения груза относительно неподвижной мировой системы координат и/или блок управление перемещением предназначен для расположения груза относительно неподвижной мировой системы координат.
Посредством фиксирования положения груза регулируют подъем троса с отклонением от вертикали, что предотвращает или, по меньшей мере, снижает статическую деформацию от навешенного груза. Чтобы снизить колебательную динамику или полностью ее предотвратить, устройство подавления маятникового эффекта предназначено для управления поворотным механизмом и шасси грузовой тележки таким образом, чтобы обеспечить, по возможности, постоянное вертикальное положение троса относительно груза даже при постоянном увеличении наклона крана вперед с ростом грузового момента. Например, при подъеме груза с земли учитывают наклонное движение крана вследствие его деформирования под действием груза, а шасси грузовой тележки перемещают с учетом зафиксированного положения груза или с учетом упреждающей оценки деформации наклона таким образом, чтобы при возникающей деформации крана подъемный трос проходил вертикально относительно груза. При этом максимальная статическая деформация возникает в точке отрыва груза от земли. В этом случае отпадает необходимость подъема троса с отклонением от вертикали. Соответствующим образом альтернативно или дополнительно и поворотный механизм смещают с учетом зафиксированного положения груза и/или позиционируют с учетом упреждающей оценки поперечной деформации, чтобы при возникающей деформации крана подъемный трос проходил вертикально относительно груза.
Такое регулирование подъема троса с отклонением от вертикали может позднее активировать оператор, используя за счет этого кран в виде манипулятора. За счет этого груз он позиционирует только нажимом и/или тягой. Регулирование подъема троса с отклонением от вертикали соответствует при этом отклонению, вызванному оператором. Это обеспечивает реализацию управления манипулятором.
Указанное устройство подавления маятникового эффекта при ручном управлении краном с использованием таких элементов управления, как джойстики и т.п., мониторит вводимые крановщиком команды управления и, при необходимости, корректирует их, в частности, снижая, например, заданное крановщиком ускорение или автоматически включая противонаправленное движение, если крановщик введенным движением крана вызвал маятниковое колебание груза крана, или может его вызвать.
Альтернативно или дополнительно устройство подавления маятникового эффекта можно использовать и при автоматическом управлении краном, при котором система управления крана перемещает автоматически, как автопилот, грузоподъемное средство крана автоматически, по меньшей мере, между двумя конечными точками вдоль пути его перемещения. В таком автоматическом режиме, в котором модуль определения пути перемещения системы управления определяет отрезок перемещения, например, по принципу контурного программного управления, а автоматический модуль перемещения системы управления управляет приводными регуляторами или приводными механизмами, перемещая грузовой крюк вдоль определенного пути перемещения, устройство подавления маятникового эффекта действует при передаче команд управления на регуляторы приводов через указанный модуль управления перемещением, чтобы перемещать крюк крана без раскачивания или чтобы гасить маятниковые колебания.
Далее изобретение более подробно раскрыто на основе предпочтительных примеров его осуществления с привлечением соответствующих чертежей, на которых представлено следующее:
фиг.1 – схема поворотного башенного крана, у которого положение грузового крюка и угол отклонения троса от вертикали фиксируют датчики и у которого устройство подавления маятникового эффекта воздействует на подачу команд приводным механизмам для предотвращения колебательных движений грузового крюка и подъемного троса,
фиг.2 – схема фильтра Кальмана устройства подавления маятникового эффекта и его действия по изменению установочных параметров приводных регуляторов,
фиг.3 – схема деформаций и видов колебаний поворотного бакенного крана под действием груза и их подавления или предотвращения путем регулирования подъема троса с отклонением от вертикали, причем
фрагмент а) – деформация наклона вперед поворотного башенного крана под действием груза и связанный с этим подъем троса с отклонением от вертикали,
фрагменты b) и c) – аксонометрия поперечной деформации поворотного башенного крана и ее вертикальная проекция,
фрагменты d) и e) – подъем троса с отклонением от вертикали, связанный с такими поперечными деформациями.
Как показано на фиг.1, кран выполнен в виде поворотного башенного крана. Поворотный башенный кран по фиг.1 имеет известную, саму по себе, башню 201, установленную на ней стрелу 202 с противовесной консолью 203 в качестве баланса, на которой установлен контрбаланс 204. Указанную стрелу 202 и противовесную консоль 203 поворачивают вокруг вертикальной оси вращения 205, сосной с осью башни, посредством поворотного механизма. На стреле 202 посредством привода грузовой тележки перемещают грузовую тележку 206, причем с грузовой тележки 206 опущен подъемный трос 207 с закрепленным на нем грузовым крюком 208.
Как также показано на фиг.1, кран 2 имеет при этом электронное устройство 3 управления с установленной, например, на самом кране ЭВМ управления. Указанное устройство 3 управления подает при этом команды на различные исполнительные механизмы, гидравлические контуры, электродвигатели, приводные механизмы и другие рабочие агрегаты соответствующей строительной машины. У указанного крана – это, например, подъемный механизм, поворотный механизм, привод грузовой тележки, привод качания стрелы, если таковой имеется, и т.п.
Указанное электронное устройство 3 управления коммутировано при этом с терминалом 4, установленным в кабине машиниста, выполненным, например, в виде планшета с сенсорным экраном и/или джойстика, поворотных ручек, ползунков и аналогичных манипуляторов, что обеспечивает, с одной стороны, индикацию различной информации от ЭВМ 3 управления на терминал 4 и, с другой стороны, ввод команд управления через терминал 4 для устройства 3 управления.
Указанное устройство 3 управления крана 1 предназначено, в частности, для подачи команд управления на указанные приводные механизмы подъемного механизма, грузовой тележки и поворотного механизма даже в том случае, если устройство 340 подавления маятникового эффекта фиксирует релевантные для маятникового движения параметры.
Для этого кран 1 имеет блок 60 фиксации, фиксирующий подъем троса 207 с отклонением от вертикали и/или отклонение грузового крюка 208 от вертикали 61, проходящей через точку подвеса грузового крюка 208, т.е. через грузовую тележку 206. В частности, фиксируют угол φ подъема троса относительно вертикали силы тяжести, т.е. вертикали 62 (фиг.1).
Предназначенное для этого средство 62 идентификации блока 60 фиксации идентифицирует, например, оптическим способом указанное отклонение. В частности, на грузовой тележке 206 устанавливают камеру 63 или другой визуализирующий датчик, направленный вертикально вниз от грузовой тележки 206 таким образом, чтобы неотклоненный грузовой крюк 208 находился в центре предоставляемого камерой изображения. При отклонении грузового крюка 208 от вертикали 61, например, вследствие рывка грузовой тележки 206 или резкого торможения поворотного механизма, изображение грузового крюка 208 смещается от центра изображения камеры, что идентифицирует блок 64 обработки изображения.
В зависимости от зафиксированного отклонения от вертикали 61, в частности с учетом направления и величины отклонения, устройство 3 управления подает посредством устройства 340 подавления маятникового эффекта команды управления на привод поворотного механизма и привод грузовой тележки, чтобы снова установить грузовую тележку более или менее точно над грузовым крюком 208 и компенсировать маятниковое движение или ослабить его или даже изначально полностью не допустить его.
Для этого устройство 340 подавления маятникового эффекта включает средства 342 идентификации динамических деформаций структурных элементов, причем блок 341 управления устройства 340 подавления маятникового эффекта, определяющий команды управления на приводной механизм для подавления маятникового эффекта, должен учитывать идентифицированные динамические деформации структурных элементов при формировании команд управления приводным механизмам.
При этом средства 342 идентификации имеют блок 343 оценки, обсчитывающий деформации и движения машинной структуры под действием динамических нагрузок, происходящих в зависимости от введенных с пульта управления команд управления и/или в зависимости от определенных действий управления приводных механизмов и/или в зависимости от определенного характера скорости и/или ускорения, и учитывающий отличительные особенности структуры крана. В частности, структурные деформации и вытекающие из них движения структуры рассчитывает вычислительный блок 348 на основе, занесенной в память расчетной модели в зависимости отведенных с пульта управления команд управления.
Альтернативно или дополнительно устройство 340 гашения маятникового эффекта имеет также соответствующие систему 344 датчиков, фиксирующих такие гибкие деформации и движения структурных элементов под воздействием динамических нагрузок. Такая система 344 датчиков включает, например, такие датчики деформации, как тензорезисторы на стальной конструкции крана, например на ферменной конструкции башни 201 или стрелы 202. Альтернативно или дополнительно устанавливают датчики ускорения и/или скорости для фиксирования определенных движений структурных элементов, например наклона окончания стрелы или вращательные динамические эффекты на стреле 202. Альтернативно или дополнительно устанавливают также датчики наклона или гироскопы, например, на башне 201, в частности на ее верхнем отрезке, где установлена стрела, чтобы фиксировать динамику башни 201. Альтернативно или дополнительно устанавливают также датчики движения и/или ускорения на приводных магистралях, чтобы фиксировать динамику приводных магистралей. Например, для направляющих роликов подъемного троса грузовой тележки 206 и/или для направляющих роликов тросовой оттяжки наклонной стрелы устанавливают датчики вращения, чтобы фиксировать фактическую скорость троса в релевантных точках.
Как показано на фиг.2, устройство 340 подавления маятникового эффекта имеет блок фильтров или регистратор 345, регистрирующий реакции крана на определенные установочные параметры регуляторов 347 приводов и определяющий с учетом заданных закономерностей динамической модели крана, которая может быть принципиально разной и которую получают из анализа и симуляции стальной конструкции, установочные параметры регулятора на основе зарегистрированных реакций крана.
Такой блок фильтров или регистратор 345b выполнен, в частности, в виде фильтра Кальмана 346, на который заводят в качестве входных параметров установочные параметры регуляторов 347 привода крана и движения крана, в частности угол φ отклонения подъема троса от вертикали 62 и/или его отклонения по времени или угловую скорость указанного подъема с отклонением от вертикали, и который на основе этих входных параметров и уравнений Кальмана, моделирующих динамическую систему крановой структуры, в частности ее стальных элементов и приводных тросов, соответствующе определяет установочные параметры для приводных регуляторов 347, чтобы обеспечить необходимое гашение маятникового эффекта.
Посредством такого подъема троса с отклонением от вертикали гасят или изначально не допускают, в частности, деформации и колебания поворотного башенного крана под воздействием груза, как показано, например, на фиг.3, причем на фрагменте а) - сначала схематично наклонная деформация поворотного башенного крана под действием груза вследствие прогиба башни 201 и связанного с этим опускания стрелы 202 с соответствующим отклонением подъема троса от вертикали. Далее на фрагментах b) и c) фиг.3 – аксонометрия схематического примера поперечной деформации поворотного башенного крана, а также ее вертикальная проекция с возникающими при этом деформациями башни 201 и стрелы 202.
В заключение на фиг.3 на фрагментах d) и е) показан связанный с этими деформациями подъем троса с отклонением от вертикали.
Для противодействия соответствующей колебательной динамике устройство 340 подавления маятникового эффекта включает регулятор подъема троса с отклонением от вертикали. В частности, средство 62 идентификации фиксирует положение грузового крюка 208, в частности его подъем с отклонением от вертикали, т.е. отклонение подъемного троса 207 от вертикали, и передает его на указанный фильтр Кальмана 346.
Система датчиков положения предназначена предпочтительно для фиксирования груза или грузового крюка относительно неподвижной мировой системы координат, а/или устройство 340 гашения маятникового эффекта предназначено для позиционирования груза относительно неподвижной мировой системы координат.
Фиксированием положения груза обеспечено при этом регулирование подъема с отклонением от вертикали, снижающее статическую деформацию от навешенного груза или, по меньшей мере, снижающее ее. Снижающее или даже изначального не допускающее колебательную динамику устройство 340 подавления маятникового эффекта предназначено для корректирования работы поворотного механизма и шасси грузовой тележки таким образом, чтобы трос был, по возможности, постоянно направлен вертикально относительно груза, даже если кран под действием растущего грузового момента все больше наклоняется вперед.
Например, при отрыве груза от земли учитывают движение наклона крана вследствие его деформации под действием груза и шасси грузовой тележки перемещают с учетом зафиксированного положения груза или позиционируют с учетом заблаговременного расчета деформации наклона таким образом, чтобы подъемный трос при возникшей деформации крана был расположен вертикально относительно груза. Максимальная статическая деформация возникает в точке отрыва груза от земли. В этом случае отпадает необходимость в регулировании подъема с отклонением от вертикали. Альтернативно или дополнительно соответствующим образом перемещают, и поворотный механизм с учетом зафиксированного положения груза и/или позиционируют его с учетом заблаговременного расчета поперечной деформации таким образом, чтобы подъемный трос при возникшей деформации крана был расположен вертикально относительно груза.
Такое регулирование подъема с отклонением от вертикали может быть позднее активировано оператором, который может использовать кран в качестве манипулятора. За счет этого он может корректировать позиционирование груза только посредством давления или тяги. Регулирование подъема с отклонением от вертикали соответствует при этом отклонению, вызванному оператором. Это обеспечивает управление манипулятором.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН | 2017 |
|
RU2734966C2 |
| СИМУЛЯТОР ПОДЪЕМНОГО КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ ИЛИ ВИЛОЧНОГО ПОГРУЗЧИКА | 2017 |
|
RU2730697C2 |
| БАШЕННЫЙ КРАН | 1990 |
|
RU2006449C1 |
| КРАН, А ТАКЖЕ СПОСОБ КОНТРОЛЯ УСТРОЙСТВА ПРЕДОХРАНЕНИЯ ОТ ПЕРЕГРУЗОК УКАЗАННОГО КРАНА | 2016 |
|
RU2709322C2 |
| БАШЕННЫЙ КРАН | 1990 |
|
RU2041155C1 |
| КРАН, А ТАКЖЕ СПОСОБ КОНТРОЛЯ ПРЕДОХРАНЕНИЯ ОТ ПЕРЕГРУЗОК ТАКОГО КРАНА | 2016 |
|
RU2722326C2 |
| БАШЕННЫЙ КРАН | 2007 |
|
RU2345946C1 |
| БАШЕННЫЙ ПОВОРОТНЫЙ КРАН | 2013 |
|
RU2623287C2 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ И/ИЛИ АВТОПОГРУЗЧИКА | 2017 |
|
RU2741456C2 |
| Башенный кран | 1982 |
|
SU1031885A1 |



Настоящее изобретение относится к подъемным устройствам. Поворотный башенный кран, с размещенным на подъемном тросе грузоприемным средством, содержит приводные механизмы для движения нескольких компонентов крана и перемещения грузоприемного средства, устройство управления приводными механизмами для перемещения грузоприемного средства вдоль пути его перемещения, а также устройство подавления маятникового эффекта колебательных движений грузоприемного средства. Устройство подавления маятникового эффекта имеет блок управления для определения команд управления приводными механизмами в зависимости от релевантных для колебательных движений параметров. Достигается подавление маятникового эффекта и улучшение учета разнообразных воздействий структуры крана. 2 н. и 14 з.п. ф-лы, 3 ил.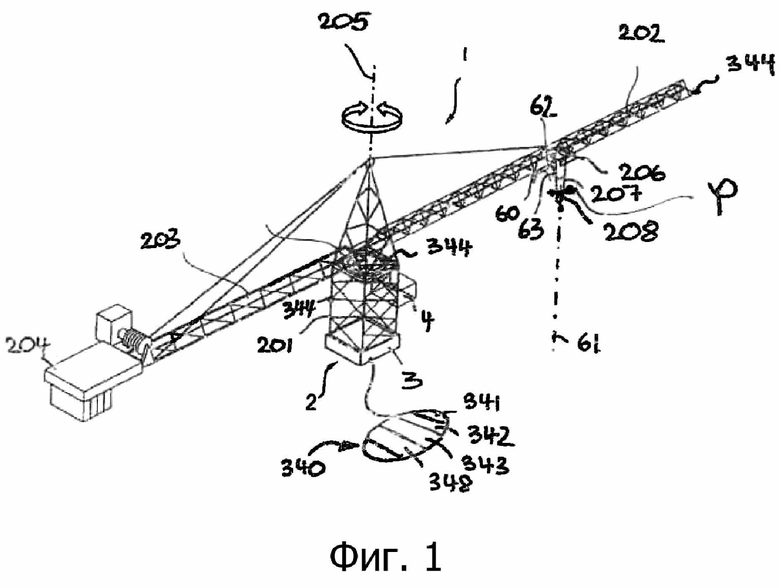
1. Кран, в частности поворотный башенный кран (207), с размещенным на подъемном тросе (208) грузоприемным средством (208), приводными механизмами для движения нескольких компонентов крана и перемещения грузоприемного средства (208), устройством (3) управления приводными механизмами для перемещения грузоприемного средства (208) вдоль пути его перемещения, а также с устройством (340) подавления маятникового эффекта для гашения колебательных движений грузоприемного средства (208) и/или подъемного троса (207), причем устройство (340) гашения маятникового эффекта имеет блок (341) управления для определения команд управления приводными механизмами в зависимости от колебательно-релевантных параметров, отличающийся тем, что устройство (340) подавления маятникового эффекта имеет средство (342) идентификации для определения деформаций и/или движений структурных элементов крана вследствие динамических нагрузок, причем блок (341) управления устройства (340) подавления маятникового эффекта предназначен для учета при определении команд управления приводными механизмами определенных деформаций и/или движений структурных элементов вследствие динамических нагрузок.
2. Кран по п. 1, отличающийся тем, что структурные элементы включают башню (201) и/или стрелу (202), а средство (342) идентификации предназначено для определения деформаций и/или нагрузок башни (201) и/или стрелы (202) вследствие динамических нагрузок.
3. Кран по п. 1 или 2, отличающийся тем, что структурные элементы включают детали приводных линий, например элементы поворотного механизма, привода грузовой тележки и т.п., а средство (342) идентификации предназначено для определения деформаций и/или движений деталей приводных линий вследствие динамических нагрузок.
4. Кран по любому из пп. 1–3, отличающийся тем, что средство (342) идентификации содержит блок (343) оценки деформаций и/или движений структурных элементов вследствие динамических нагрузок на основе цифровых данных модели данных, характеризующей структуру крана.
5. Кран по любому из пп. 1–4, отличающийся тем, что средство (342) идентификации содержит вычислительный блок (348) для обсчета структурных деформаций и соответствующих движений структуры, на основе занесенной в память расчетной модели в зависимости от введенных на пульте управления команд управления.
6. Кран по любому из пп. 1–5, отличающийся тем, что средство (342) идентификации имеет систему (344) датчиков для регистрации деформаций и/или динамических параметров структурных элементов.
7. Кран по любому из пп. 1–6, отличающийся тем, что система (344) датчиков включает датчик наклона и/или ускорения для фиксации наклона и/или ускорения башни, датчик скорости и/или ускорения вращения для фиксации скорости и/или ускорения вращения стрелы и/или датчик наклонного движения и/или ускорения для фиксации наклонных движений и/или ускорений стрелы, и/или датчик скорости и/или ускорения троса для фиксации скорости и/или ускорения подъемного троса (207).
8. Кран по любому из пп. 1–7, отличающийся тем, что установлен блок (60) фиксации угла (φ) отклонения подъемного троса (207) и/или грузоприемного средства (208) от вертикали (61), причем блок (341) управления устройства (340) подавления маятникового эффекта предназначен для определения команд управления на приводные механизмы в зависимости от зафиксированного угла отклонения подъемного троса (207) и/или грузоприемного средства (208) от вертикали (61).
9. Кран по любому из пп. 1–8, отличающийся тем, что блок (60) фиксации имеет систему визуализирующих датчиков, в частности камеру (62), установленную в зоне точки подвеса подъемного троса (207), в частности на грузовой тележке (206), и направленную вертикально вниз, причем установлен блок (64) обработки изображения для обработки изображения, полученного от системы визуализирующих датчиков, относительно местоположения грузоприемного средства (208) на предоставленном изображении и определения угла (φ) отклонения грузоприемного средства (208) и/или подъемного троса (207) и/или скорости отклонения от вертикали (61).
10. Кран по любому из пп. 1–9, отличающийся тем, что устройство (340) подавления маятникового эффекта включает блок фильтров и/или регистратор (345) для определения установочных параметров регулятора привода для подачи команд управления приводным механизмам, причем указанный блок фильтров и/или регистратор (345) предназначен для получения в качестве входных параметров установочных параметров регуляторов (347) приводов и зафиксированных и/или обсчитанных движений элементов крана и/или деформаций и/или движений структурных элементов под действием динамических нагрузок и для определения установочных параметров в зависимости от полученных для определенных установочных параметров движений элементов крана и/или деформаций структурных элементов.
11. Кран по любому из пп. 1–10, отличающийся тем, что блок фильтров и/или регистратор (345) выполнен в виде фильтра Кальмана (346).
12. Кран по любому из пп. 1–11, отличающийся тем, что фильтр Кальмана (346) предназначен для реализации функции зафиксированных и/или обсчитанных, и/или рассчитанных, и/или симулированных и характеризующих динамику структурных элементов крана.
13. Кран по любому из пп. 1–12, отличающийся тем, что устройство (340) подавления маятникового эффекта включает систему датчиков положения, предназначенных для фиксирования грузоприемного средства (208) относительно неподвижной мировой системы координат и/или для позиционирования грузоприемного средства (208) относительно неподвижной мировой системы координат.
14. Кран по любому из пп. 1–13, отличающийся тем, что устройство (340) подавления маятникового эффекта включает регулятор подъема с отклонением от вертикали и предназначено для управления приводными механизмами при движении элементов крана и перемещении грузоприемного средства (208) таким образом, чтобы подъемный трос (207) проходил, по возможности, постоянно вертикально относительно груза, даже при увеличении деформации крана с ростом грузового момента и/или поперечных нагрузок, и/или поперечных скручивающих моментов.
15. Способ управления краном, в частности поворотным башенным краном, с размещенным на подъемном тросе (207) грузоприемным средством (208), перемещаемым посредством приводных механизмов, управляемых крановым устройством (3) управления, причем подачу команд управления на приводные механизмы определяют посредством устройства (340) подавления маятникового эффекта в зависимости от релевантных для колебательных движений параметров, отличающийся тем, что устройство (340) подавления маятникового эффекта определяет команды управления приводными механизмами и учитывает при их определении деформации и/или движения структурных элементов крана, возникающие вследствие динамических нагрузок.
16. Способ по п. 15, отличающийся тем, что устройство (340) подавления маятникового эффекта включает фильтр Кальмана (346), в который в качестве входных параметров заводят установочные параметры приводных регуляторов (347) по управлению приводными механизмами, а также возникающие при этих установочных параметрах движения и/или деформации крана, и/или снижающие динамику движения структурных элементов, причем фильтр Кальмана (346) определяет установочные параметры приводных регуляторов (347) в зависимости от указанных входных параметров.
| DE 10064182 A1, 08.05.2002 | |||
| EP 1880971 A2, 23.01.2008 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ КРАНОМ ДЛЯ УПРАВЛЕНИЯ ПОДЪЕМНЫМ МЕХАНИЗМОМ КРАНА | 2010 |
|
RU2534694C2 |
| DE 4315005 A1, 10.11.1994. | |||

