Изобретения относятся к области радиолокации и могут быть использованы при обнаружении отражающих радиоизлучение целей, находящихся на больших дальностях, скрытно и с минимальными энергетическими затратами.
Из уровня техники известен способ радиолокационного обнаружения целей (патент RU №2233456, МПК 7 G01S 13/00), основанный на приеме излучений из контролируемых направлений, измерении параметров излучений с помощью пассивной радиолокационной станции (ПРЛС), на поиске источников излучений и на получении ПРЛС через ретранслятор, расположенный в зоне прямой видимости источника излучений и ПРЛС, информации о сигнале источника излучений, измерении корреляции между этим сигналом и сигналами, отраженными от целей, и принятии решения об обнаружении цели, если сигнал, пропорциональный измеренной величине корреляции, превышает пороговый уровень.
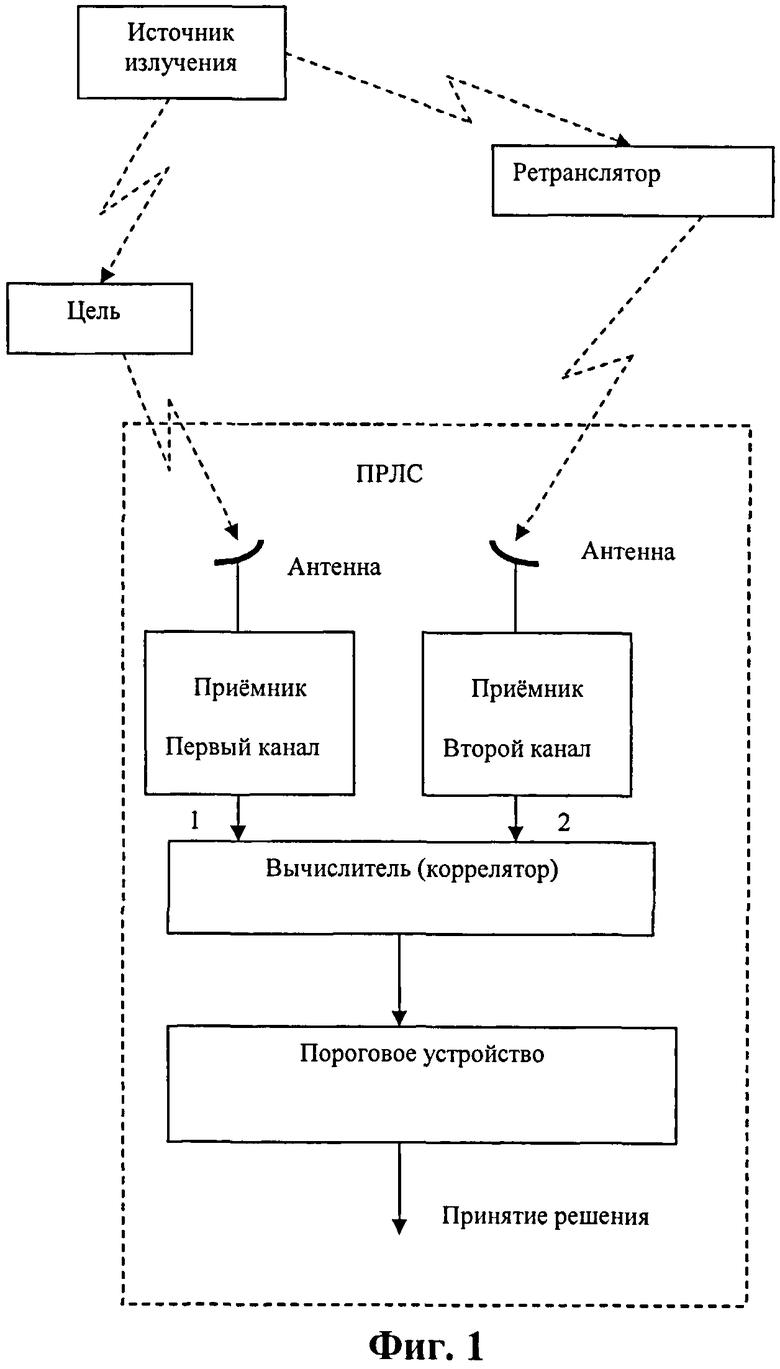
Из уровня техники известен комплекс (патент RU №2233456, МПК 7 G01S 13/00) (фиг.1), содержащий ПРЛС и ретранслятор, ПРЛС включает две антенны и приемники первого и второго каналов, вычислитель (коррелятор) и пороговое устройство. Выходы антенн подключены к соответствующим входам приемников первого и второго каналов ПРЛС, а их выходы подключены к первому и второму входам вычислителя, выход вычислителя подключен ко входу порогового устройства. Ретранслятор удален от ПРЛС в пределах прямой видимости.
Комплекс работает следующим образом: сигнал, отраженный от цели, облучаемой источником излучений, принимают первой антенной и подают на вход приемника первого канала ПРЛС, сигнал от источника излучений, переизлученный ретранслятором, расположенным в области прямой видимости источника излучений и ПРЛС, принимают второй антенной и подают на вход приемника второго канала ПРЛС. Сигналы с выходов первого и второго каналов ПРЛС подают на первый и второй входы вычислителя, который вырабатывает сигнал, пропорциональный уровню корреляции сигналов на его входе, и подают его на пороговое устройство. Превышение порога фиксируют, как обнаружение цели в контролируемом направлении.
Преимущество способа и комплекса состоит в том, что он обеспечивает скрытность его работы и возможность обнаружения целей, подсвечиваемых источником излучения, т.е. без затрат энергии на облучение пространства.
Недостаток способа и комплекса состоит в том, что, обеспечив обнаружение цели и определение ее угловых координат в контролируемом направлении, он не позволяет измерять дальность до этой цели.
Кроме того, из-за неизвестных параметров сигналов источников излучений невозможно обеспечить квазисогласованный прием, что снижает дальность обнаружения цели, а из-за непредсказуемой работы случайного источника излучений использование пассивного режима обнаружения целей по отражениям от целей сигналов, излучаемых источником, может быть лишь эпизодическим; кроме того, необходимо иметь ретранслятор.
Известен наиболее близкий к предлагаемому способ определения координат целей, облучаемых посторонним источником радиоизлучений, основанный на измерении угловых координат целей по отраженным ими радиоизлучениям и вычислении дальности до цели с помощью ПРЛС, расположенных в разнесенных в пространстве пунктах приема (Теоретические основы радиолокации / Под редакцией Я.Д. Ширмана. М.: Сов. Радио, 1970, с.494-495). В этом способе «из-за отсутствия информации о периоде излучения…» для определения всех координат цели требуется комплекс двух или более разнесенных в пространстве ПРЛС с согласованным обзором пространства.
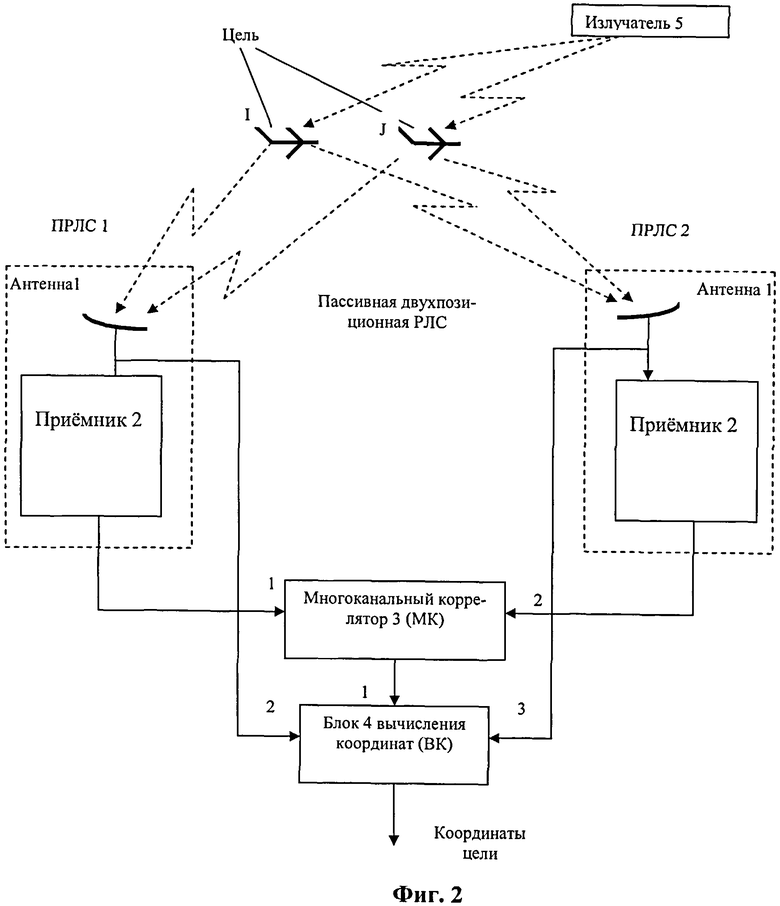
Известна двухпозиционная радиолокационная станция - комплекс (Теоретические основы радиолокации / Под редакцией Я.Д. Ширмана. М.: Сов. Радио, 1970, с.500), реализующий наиболее близкий известный способ (Фиг.2), содержащий разнесенные в пространстве ПРЛС 1 и ПРЛС 2, каждая из которых включает антенну 1 и приемник 2, а также содержит блок 3 многоканальный коррелятор (МК) и блок 4 вычисления координат целей (ВК). Выходы антенн 1 подключены к входам приемников 2, а их выходы подключены к первому и второму входам блока 3 МК соответственно, выход его подключен к первому входу блока 4 ВК, а координатные выходы антенн 1 ПРЛС 1 и ПРЛС 2 подключены ко второму и третьему входам блока 4 ВК соответственно.
Достоинством этих известных способа и комплекса является определение угловых координат и дальности при скрытности его работы и простота его реализации при наличии в зоне, облучаемой источником излучений, одной цели.
Недостатком является значительное усложнение реализации способа при увеличении числа целей (источников излучений или источников отражений) (там же ст.495 последний абзац). При этом кроме необходимости увеличения числа разнесенных в пространстве ПРЛС будут увеличиваться затраты времени на определение координат целей при последовательном согласованном осмотре угловых направлений одновременно несколькими ПРЛС, а это при использовании постороннего источника излучений создает нестабильность функционирования способа и возможность пропуска целей.
Кроме того, недостаток заключается еще и в том, что при использовании случайных посторонних источников излучений невозможно обеспечить квазисогласованный прием отраженного сигнала, что исключает возможность использования способа для контроля дальних зон.
Решаемой задачей (техническим результатом) является стабильное, т.е. непрерывное в течение длительного времени, и скрытное определение всех координат целей в дальней зоне контроля при сокращении числа разнесенных в пространстве ПРЛС.
Поставленная задача (технический результат) решается тем, что в способе определения координат целей, облучаемых посторонним источником радиоизлучений, основанном на измерении угловых координат целей по отраженным ими радиоизлучениям и вычислении дальности до цели с помощью ПРЛС, согласно изобретению в качестве источника радиоизлучений выбирают радиолокационную станцию, расположенную за горизонтом (ЗРЛС), с известными ее координатами и параметрами сигналов (зондов), с постоянным или переменным периодом их излучений, облучающую контролируемую зону, определяют момент приема зонда, отраженного целью, вычисляют момент излучения зонда ЗРЛС, определяют дальности до других целей, от которых хотя бы одной из ПРЛС принят отраженный зонд, осуществляют их первичный захват и переходят к их автосопровождению с помощью этой ПРЛС, при приеме отраженного зонда устанавливают вероятное положение момента излучения зонда и вычисляют дальности до вновь обнаруженных целей, облученных этим зондом, в необходимых случаях вновь вычисляют момент излучения зонда, по его значению уточняют дальности до целей и их скорости.
Поставленная задача (технический результат) решается также тем, что при постоянном периоде излучения зонда момент его излучения в последующие интервалы времени наблюдения вычисляют на основе известного периода излучения, а уточняют момент излучения зонда при выходе сопровождаемой цели из строба сопровождения.
Поставленная задача (технический результат) решается также тем, что при переменном периоде излучения зонда и сопровождении одной цели повторно вычисляют момент излучения зонда через интервал времени, за который погрешность прогнозирования ее положения, возникающая из-за погрешности оценки ее скорости, может не обеспечить заданную точность определения дальности.
Поставленная задача (технический результат) решается также тем, что при переменном периоде излучения зонда и сопровождении двух или более целей, облучаемых одним и тем же зондом, момент его излучения определяют как среднее значение моментов излучения зонда, вычисленное для каждой цели по ее прогнозируемому положению, а повторно вычисляют момент излучения зонда, если вычисленный момент излучения зонда для одной или более целей превысит допустимую величину отклонения от среднего значения, при этом допустимую величину отклонения устанавливают в зависимости от допустимой ошибки в определении дальности.
Поставленная задача (технический результат) достигается тем, что заявленный комплекс для определения координат целей, представляющий собой многопозиционный радиолокатор, включающий не менее двух ПРЛС, каждая из которых включает антенну и приемник, содержит блок вычисления координат (ВК), выходы антенн подключены к входам приемников, согласно изобретению введены блок вычисления момента излучения зонда (ВМИЗ), блок сопровождения целей (СЦ) и блок датчика единого времени (ДЕВ), выходы приемников подключены к первому и второму входам блока ВМИЗ, выход которого подключен к входу блока ВК, выход блока ВК подключен к входу блока СЦ, выход блока ДЕВ подключен к третьему входу блока ВМИЗ.
Поставленная задача (технический результат) достигается также тем, что в заявленном комплексе антенны одной или нескольких ПРЛС выполнены многолучевыми с диаграммами направленности антенн (ДНА), охватывающими зону или ее часть, облучаемую ЗРЛС.
Поставленная задача (технический результат) достигается также тем, что в заявленном комплексе для определения координат целей антенны одной или нескольких ПРЛС выполнены с возможностью перемещения ДНА в пределах зоны, облучаемой ЗРЛС.
Суть изобретения состоит в следующем. В качестве источника излучений выбирают ЗРЛС с известными ее координатами и параметрами зонда с постоянным или переменным периодом повторений, которая облучает контролируемую зону, так как при этом:
- ЗРЛС обеспечивает подсвечивание контролируемой зоны сравнительно высоким уровнем энергии удаленной для точки приема отраженного зонда, но ближней к зоне ЗРЛС, а известность параметров зонда обеспечивает возможность квазисогласованного приема ее зондов. Все это позволяет увеличить дальность обнаружения цели и определять ее координаты с требуемой точностью и разрешающей способностью, определяемой параметрами ЗРЛС (а не случайного источника), при этом в качестве ЗРЛС целесообразно выбирать наземную стационарную или перевозимую РЛС, поскольку координаты ее не изменяются или изменяются через большие промежутки времени и легко определяются;
- обеспечивается стабильность работы источника излучений, поскольку в задачи ЗРЛС входит постоянный контроль пространства;
- дополнительно будет увеличена дальность обнаружения для целей, находящихся вблизи линии, соединяющей ПРЛС и ЗРЛС, поскольку их ЭПР значительно возрастает. (Справочник по радиолокации под редакцией М. Скольника, т.4, стр.209);
Все эти преимущества можно получить, например, при выборе в качестве источника излучения станции ПРО, размещаемых (или размещенных) в Европе.
После обнаружения отраженных от целей зондов выбранной ЗРЛС, облучающей контролируемую зону, осуществляют первичный захват и автосопровождение целей с помощью ПРЛС (С.З. Кузьмин - Основы проектирования систем цифровой обработки радиолокационной информации стр.109). Для этого с помощью двух ПРЛС, расположенных в разнесенных пунктах пространства, методом триангуляции (Теоретические основы радиолокации / Под редакцией Я.Д. Ширмана. Сов. Рад. М., 1970 г. стр.495) определяют координаты до одной из обнаруженных целей и вычисляют момент излучения зонда ЗРЛС. При этом в едином времени отмечают моменты приема отражений от других целей хотя бы одной из ПРЛС и по вычисленному моменту излучения зонда ЗРЛС определяют дальность до них. Операции расчета начальных значений параметров (скорости, направления движения) и прогнозирования положения отметки на следующий обзор реализуют при первичном захвате с помощью специального алгоритма фильтрации (С.З. Кузьмин - Основы проектирования систем цифровой обработки радиолокационной информации стр.140) и на основании этого ведут автосопровождение с помощью одной ПРЛС, благодаря чему совместную работу ПРЛС в отличие от прототипа можно использовать только эпизодически для уточнения момента излучения зонда и только по одной цели, что упрощает взаимодействие ПРЛС и сокращает время определения и уточнения координат. Уточнение момента излучения зонда зависит от условий, возникающих при сопровождении целей одной ПРЛС, и определяется допустимой погрешностью вычисления дальности сопровождаемых целей. Если период излучения зонда постоянен, то ошибка в определении дальности и момента излучения зонда зависит только от изменения скорости цели и носит случайный характер. При этом повторное взаимодействие двух ПРЛС для уточнения момента излучения зонда необходимо лишь тогда, когда сопровождаемая цель выйдет из строба автосопровождения.
Если период следования зонда переменный и сопровождают одну цель, то уточняют момент излучения зонда через интервал времени наблюдения, за который погрешность прогнозирования ее положения, возникающая из-за погрешности измерения ее скорости, может не обеспечить заданную точность определения дальности, исходя из следующего:
если погрешность измерения скорости равна ΔV (первоначально определяется параметрами ПРЛС), то за время наблюдения tc погрешность определения дальности до цели составит ΔD=tc×ΔV. При допустимой погрешности определения дальности ΔDдоп (она может устанавливаться в зависимости от удаленности контролируемой зоны), интервал времени наблюдения Δtc, через который необходимо уточнять момент излучения зонда, будет определяться из выражения Δtc≤ΔDдоп/ΔV.
Ошибка в определении скорости в процессе сопровождения определяется не только параметрами ПРЛС, но и изменениями скорости цели в процессе ее наблюдения. При этом ошибка ΔD, полученная после измерения дальности по уточненному моменту излучения зонда через интервал Δtc, будет больше ΔDдоп и интервал времени наблюдения Δtc автоматически уменьшают. Автоматическое отслеживание величины Δtc обеспечивает поддержание погрешности определения дальности на заданном уровне.
При переменном периоде излучения зонда и автосопровождении n≥2 целей, облучаемых одним и тем же зондом, момент его излучения tn определяют как среднее значение моментов излучения зонда, вычисленное для i-й цели, где i=1…n, по ее прогнозируемому положению, 
Момент излучения зонда опережает момент приема отраженного зонда от облучаемой цели, дальность до которой определена с помощью взаимодействия ПРЛС, на величину суммарного времени прохождения зонда от ЗРЛС до цели и от этой цели до ПРЛС.
Изобретение иллюстрируется чертежами:
фиг.1 - РЛС, реализующая способ-аналог;
фиг.2 - комплекс, реализующий способ-прототип;
фиг.3 - диаграммы, поясняющие процесс вычисления момента излучения зонда по заявленному способу;
фиг.4 - заявленный комплекс, реализующий предлагаемый способ.
Заявленный комплекс (Фиг.4) для определения координат целей, представляющий собой многопозиционный радиолокатор, включающий не менее двух ПРЛС 1 и ПРЛС 2, каждая из которых включает антенну 1 и приемник 2, содержит блок 4 вычисления координат (ВК), блок 6 вычисления момента излучения зонда (ВМИЗ), блок 7 сопровождения целей (СЦ) и блок 8 датчика единого времени (ДЕВ), выходы антенн 1 подключены к входам приемников 2, выходы приемников 2 подключены к первому и второму входам блока 6 ВМИЗ, выход которого подключен к входу блока 4 ВК, выход блока 4 ВК подключен к входу блока 7 СЦ, выход блока 8 ДЕВ подключен к третьему входу блока 6 ВМИЗ.
Рассмотрим более подробно реализуемость способа и комплекса (Фиг.3, 4) на конкретном примере. В качестве излучателя выбирают стационарную ЗРЛС 5 с известными координатами и параметрами зондов, с постоянным или переменным периодом повторения и облучающую контролируемую зону. С помощью ПРЛС 1 или ПРЛС 2 определяют моменты приема отраженного от цели ее зонда, после измерения дальности до этой цели методом триангуляции вычисляют момент излучения зонда с помощью блока 6 ВМИЗ по формуле (2) и используют его для вычисления дальности по формуле (3) с помощью блока 4 ВК до других целей, облучаемых этим же зондом и от которых хотя бы в одной из ПРЛС принят отраженный зонд, вычисляют скорости этих целей, осуществляют первичный захват и ведут их автосопровождение с помощью ПРЛС 1 или ПРЛС 2 и блока 7 СЦ, а в необходимых случаях повторно определяют дальность хотя бы до одной из них методом триангуляции при взаимодействии ПРЛС 1 и ПРЛС 2 и уточняют момент излучения зонда с помощью блока 6 ВМИЗ, по его значению уточняют дальности до других целей и их скорости.
При постоянном периоде излучения зонда момент его излучения в последующие интервалы времени наблюдения вычисляют на основе известного периода излучения зонда, вычисленного с помощью блока 6 ВМИЗ. Если сопровождаемая цель выходит из строба сопровождения, то делают вывод о том, что изменился период излучения зонда или изменилась скорость цели. При этом вновь методом триангуляции с помощью ПРЛС 1 и ПРЛС 2 измеряют дальность до одной из сопровождаемых целей, уточняют момент излучения зонда и уточняют параметры автосопровождения с помощью ПРЛС 1 или ПРЛС 2 и блока 7 СЦ.
При переменном периоде повторения излучения зонда ЗРЛС 5 и обнаружении одной цели уточняют ее дальность триангуляционным методом путем совместной работы ПРЛС 1 и ПРЛС 2 через интервал времени наблюдения, за который погрешность прогнозирования ее положения в блоке 7 СЦ, возникающая из-за погрешности оценки ее скорости, может не обеспечить заданную точность определения дальности, вычисляемой с помощью блока 4 ВК.
При переменном периоде излучения зонда и автосопровождении с помощью ПРЛС 1 или ПРЛС 2 и блока 7 СЦ двух или более целей, облучаемых одним и тем же зондом, момент его излучения определяют с помощью блока 6 ВМИЗ как среднее значение моментов излучения зонда, вычисленное для каждой цели по ее прогнозируемому положению. Прогнозируют положение целей с помощью блока 7 СЦ, а уточняют момент излучения зонда путем уточнения дальности до одной цели триангуляционным методом при совместной работе ПРЛС 1 и ПРЛС 2 в случае его отклонения от среднего значения более порогового уровня, заданного в блоке 6 ВМИЗ для одной или более целей, исходя из допустимой ошибки в определении дальности.
В предлагаемом способе для определения дальности до целей с помощью одной ПРЛС необходимо знать момент излучения зонда tз в едином времени. Определяют tз следующим образом:
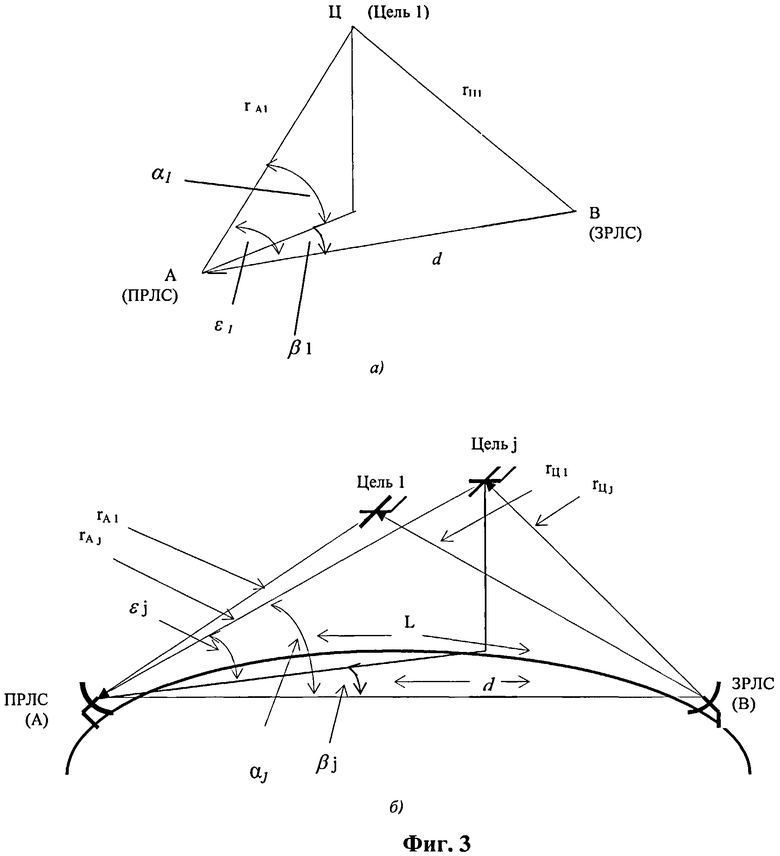
1. Триангуляционным методом с помощью двух ПРЛС определяют дальность rA1 от ПРЛС до 1-й цели (Фиг.3а) (цель, до которой этим методом измеряют дальность, условно пронумерована 1-й, а все остальные 2…n, где n - количество целей);
2. Определяют дальность rЦ1 от ЗРЛС до 1-й цели из треугольника АЦВ (Фиг.3а) по формуле

где: С - скорость света; 
d - расчетное расстояние по прямой от ЗРЛС до ПРЛС; а 1 - угол между направлениями на 1-ю цель и на ЗРЛС, определяется по формуле

где β1 и ε1 - азимут и угол места 1-й цели.
3. По известному в едином времени моменту приема tпр1 отраженного зонда от 1-й цели, найденным значениям rA1 и rЦ1, вычисляют tз по формуле

где: (τA1+τЦ1) - суммарное время распространения зонда от ЗРЛС до 1-й цели и от этой цели до ПРЛС; 
4. Вычисляют расстояние rAj до j-й цели, при j=2…n (Фиг.3б), по формуле (3), выведенной путем решения двух уравнений, полученных из треугольника АЦВ

где tnpj и a j - время приема отраженного зонда от j-й цели и угол между направлениями на эту цель и на ЗРЛС.
При измеренных азимуте βj и угле места εj j-й цели (Фиг., 3б) угол a j рассчитывают по формуле (1), заменив индекс «1» на «j».
Наиболее целесообразно в качестве источника излучения выбирать стационарную ЗРЛС сопредельного государства.
При выборе в качестве источника перевозимой ЗРЛС необходимо после ее развертывания определить ее координаты. Способы определения координат известны: либо по излучению (патент №2217773), либо визуально со спутника.
Таким образом, суть заявленных технических решений заключается в выборе ЗРЛС в качестве источника излучения, оптимального для решения задачи контроля удаленной зоны и в определении (прогнозировании) моментов излучения его зондов, которое основывается на определении дальности до одной из целей с помощью двух ПРЛС триангуляционным способом, на ведении сопровождения цели с помощью одной ПРЛС с эпизодическим уточнением дальности до цели тем же способом. Знание моментов излучения зондов источника с известными его координатами позволяет определять с помощью лишь одной ПРЛС дальности до всех целей, облучаемых этим источником. То есть для определения дальности до целей вместо постоянного измерения угловых направлений нескольких целей с помощью более чем двух ПРЛС на основе известного триангуляционного способа, в заявленном способе используют метод триангуляции лишь вначале при обнаружении цели и лишь по одной цели, для чего достаточно лишь эпизодически привлекать вторую ПРЛС, что, кроме того, упрощает процесс осмотра одной зоны прогнозируемого положения одной цели двумя антеннами.
Таким образом, сохраняется скрытность, обеспечивается стабильность и сокращение числа ПРЛС до двух, упрощение и сокращение времени взаимодействия ПРЛС, а также увеличение дальности, чем и достигается заявленный технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2530808C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ (ВАРИАНТЫ) И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2013 |
|
RU2540982C1 |
| СПОСОБ РАСПОЗНАВАНИЯ СИГНАЛОВ ИСТОЧНИКА ИМПУЛЬСНОЙ ПОМЕХИ (ВАРИАНТЫ) И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2013 |
|
RU2538195C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |
| Способ сопровождения траектории цели в активно-пассивной радиолокационной системе | 2021 |
|
RU2769566C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ЦЕЛЕЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2524923C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ-ПОСТАНОВЩИКА ОТВЕТНОЙ ПОМЕХИ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ, ОБЛУЧАЕМЫХ ПОСТАНОВЩИКОМ ОТВЕТНОЙ ПОМЕХИ | 2012 |
|
RU2531803C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ (ВАРИАНТЫ) И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2298805C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2217773C2 |
| ТРИАНГУЛЯЦИОННО-ГИПЕРБОЛИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОИЗЛУЧАЮЩИХ ВОЗДУШНЫХ ОБЪЕКТОВ В ПРОСТРАНСТВЕ | 2012 |
|
RU2503969C1 |
Изобретения относятся к области радиолокации. Достигаемый технический результат - непрерывное в течение длительного времени и скрытное определение всех координат целей в дальней зоне контроля при сокращении числа разнесенных в пространстве пассивных радиолокационных станций (ПРЛС). Указанный результат достигается тем, что в способе, основанном на измерении угловых координат целей по отраженным ими радиоизлучениям и вычислении дальности до цели с помощью ПРЛС, в качестве источника радиоизлучений выбирают радиолокационную станцию, расположенную за горизонтом (ЗРЛС), с известными ее координатами и параметрами сигналов (зондов), с постоянным или переменным периодом их излучений, облучающую контролируемую зону, определяют момент приема зонда, отраженного целью, вычисляют момент излучения зонда ЗРЛС, определяют дальности до других целей, от которых хотя бы одной из ПРЛС принят отраженный зонд, осуществляют их первичный захват и переходят к их автосопровождению с помощью этой ПРЛС, при приеме отраженного зонда устанавливают вероятное положение момента излучения зонда и вычисляют дальности до вновь обнаруженных целей, облученных этим зондом, в необходимых случаях повторно вычисляют момент излучения зонда, по его значению уточняют дальности до целей и их скорости. Заявленный способ реализуется с помощью комплекса для определения координат целей, представляющего собой многопозиционный радиолокатор, выполненный определенным образом. 2 н. и 5 з.п. ф-лы, 4 ил.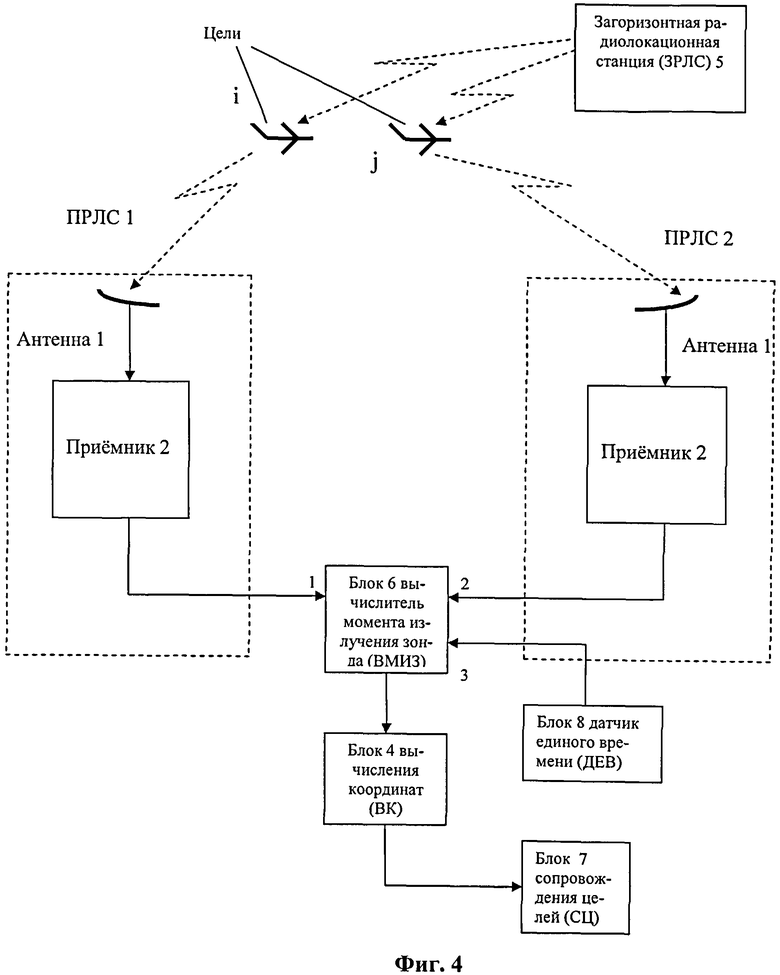
1. Способ определения координат целей, облучаемых посторонним источником радиоизлучений, основанный на измерении угловых координат целей по отраженным ими радиоизлучениям и вычислении дальности до цели с помощью пассивных радиолокационных станций (ПРЛС), отличающийся тем, что в качестве источника радиоизлучений используют радиолокационную станцию, расположенную за горизонтом (ЗРЛС), с известными ее координатами и параметрами сигналов (зондов) с постоянным или переменным периодом их излучений, облучающую контролируемую зону, и определяют момент приема зонда, отраженного этой целью, вычисляют момент излучения зонда ЗРЛС, определяют дальности до других целей, от которых хотя бы одной из ПРЛС принят отраженный зонд, осуществляют их первичный захват и переходят к их автосопровождению с помощью этой ПРЛС, при приеме отраженного зонда устанавливают вероятное положение момента излучения зонда и вычисляют дальности до вновь обнаруженных целей, облученных этим зондом, в необходимых случаях вновь вычисляют момент излучения зонда, по его значению уточняют дальности до целей и их скорости.
2. Способ по п.1, отличающийся тем, что при постоянном периоде излучения зонда момент его излучения в последующие интервалы времени наблюдения вычисляют на основе известного периода излучения, а уточняют момент излучения зонда при выходе сопровождаемой цели из строба.
3. Способ по п.1, отличающийся тем, что при переменном периоде излучения зонда и сопровождении одной цели повторно вычисляют момент излучения зонда через интервал времени, за который погрешность прогнозирования ее положения, возникающая из-за погрешности оценки ее скорости, может не обеспечить заданную точность определения дальности.
4. Способ по п.1, отличающийся тем, что при переменном периоде излучения зонда и сопровождении двух или более целей, облучаемых одним и тем же зондом, момент его излучения определяют как среднее значение моментов излучения зонда, вычисленное для каждой цели по ее прогнозируемому положению, а повторно вычисляют момент излучения зонда, если вычисленный момент излучения зонда для одной или более целей превысит допустимую величину отклонения от среднего значения, при этом допустимая величина отклонения зависит от допустимой ошибки в определении дальности.
5. Комплекс для определения координат целей, представляющий собой многопозиционный радиолокатор, включающий не менее двух пассивных радиолокационных станции (ПРЛС), каждая из которых включает антенну и приемник, содержит блок вычисления координат (ВК), выходы антенн подключены к входам приемников, отличающийся тем, что введены блок вычисления момента излучения зонда (ВМИЗ), блок сопровождения целей (СЦ) и блок датчика единого времени (ДЕВ), выходы приемников подключены к первому и второму входам блока ВМИЗ, выход которого подключен к входу блока ВК, выход блока ВК подключен к входу блока СЦ, выход блока ДЕВ подключен к третьему входу блока ВМИЗ.
6. ПРЛС по п.5, отличающаяся тем, что антенны одной или нескольких ПРЛС выполнены многолучевыми с диаграммами направленности антенн (ДНА), охватывающими зону или ее часть облучаемой ЗРЛС.
7. ПРЛС по п.5, отличающаяся тем, что антенны одной или нескольких ПРЛС выполнены с возможностью перемещения ДНА в пределах зоны, облучаемой ЗРЛС.
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2001 |
|
RU2233456C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2469347C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2000 |
|
RU2158004C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2009 |
|
RU2410712C1 |
| US 5191342 A, 02.03.1993 | |||
| US 5373297 A, 13.12.1994 | |||
| 0 |
|
SU412884A1 | |
| WO 2008094293 A3, 09.10.2008 | |||

