Изобретения относятся к области радиолокации и могут быть использованы в бортовых пассивных радиолокационных станциях (ПРЛС), расположенных на летательных аппаратах, спутниках, аэростатах и других объектах, находящихся в прямой видимости внешней радиолокационной станции (ВРЛС) с известными ее координатами и параметрами зондирующих сигналов, облучающей контролируемую зону, в которой осуществляют обнаружение и определение угловых координат отражающих радиоизлучение целей, находящихся на больших дальностях, скрытно и с минимальными энергетическими затратами.
Из уровня техники известен способ (патент RU №2233456 МПК 7 G01S 13/00) радиолокационного обнаружения объектов, основанный на приеме излучений из контролируемых направлений, измерении параметров излучений и принятии решения об обнаружении цели (объекта), при этом производят поиск источников излучений, принимают излучения этих источников излучения, измеряют корреляцию принимаемых излучений с излучениями из контролируемых направлений, и этот измеренный параметр сравнивают с порогом, осмотр пространства осуществляют с помощью ретранслятора, расположенного в зоне прямой видимости источника излучения и пассивной радиолокационной станции (ПРЛС).
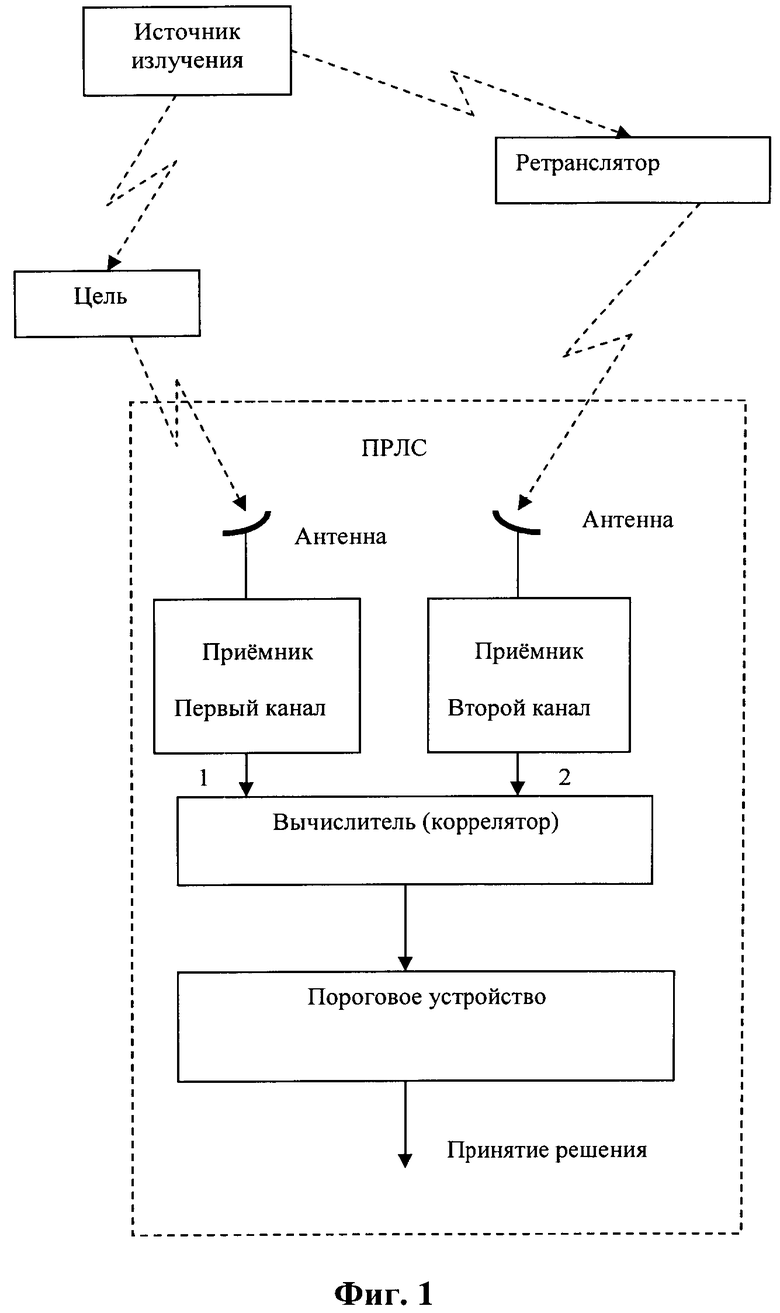
Из уровня техники известен комплекс (патент RU №2233456 МПК 7 G01S 13/00) (фиг.1), включающий ПРЛС и ретранслятор, ПРЛС содержит две антенны и приемники первого и второго каналов, вычислитель (коррелятор) и пороговое устройство. Выходы антенн подключены к соответствующим входам приемников первого и второго каналов ПРЛС, а их выходы подключены к первому и второму входам вычислителя, выход вычислителя подключен к входу порогового устройства. Ретранслятор удален от ПРЛС в пределах прямой видимости.
Комплекс работает следующим образом: сигнал, отраженный от цели, облучаемой внешним источником излучений, принимают первой антенной и подают на вход приемника первого канала ПРЛС, сигнал от источника излучений, переизлученный ретранслятором, расположенным в области прямой видимости источника излучений и ПРЛС, принимают второй антенной и подают на вход приемника второго канала ПРЛС. Сигналы с выходов первого и второго каналов ПРЛС подают на первый и второй входы вычислителя, который вырабатывает сигнал, пропорциональный уровню корреляции сигналов на его входе, и подают его на пороговое устройство. Превышение порога фиксируют как обнаружение цели в контролируемом направлении.
Преимущество способа и комплекса состоит в том, что он обеспечивает скрытность его работы и возможность обнаружения целей, подсвечиваемых внешним источником излучения, т.е. без затрат собственной энергии на облучение пространства.
Недостаток способа и комплекса состоит в том, что обеспечив обнаружение цели в контролируемом направлении, он не позволяет измерять дальность до этой цели.
Кроме того, из-за неизвестных параметров сигналов внешних источников излучений невозможно обеспечить квазисогласованный прием, что снижает дальность обнаружения цели, а из-за непредсказуемой работы случайного источника излучений использование пассивного режима обнаружения целей по отражениям от целей сигналов, излучаемых источником, может быть лишь эпизодическим.
Известен наиболее близкий способ к предлагаемым вариантам способов определения координат целей, облучаемых внешним источником радиоизлучений, основанный на определении угловых координат и дальности до целей по отраженным ими радиоизлучениям с помощью пассивных радиолокационных станций (ПРЛС), представляющих собой приемные каналы (ПК), расположенные в разнесенных в пространстве пунктах приема. (Теоретические основы радиолокации. Под ред. Я.Д. Ширмана. М., Сов. Радио, 1970, с.494- 495). В этом способе «из-за отсутствия информации о периоде излучения…» для определения всех координат цели требуется комплекс двух или более разнесенных в пространстве ПРЛС с согласованным обзором пространства.
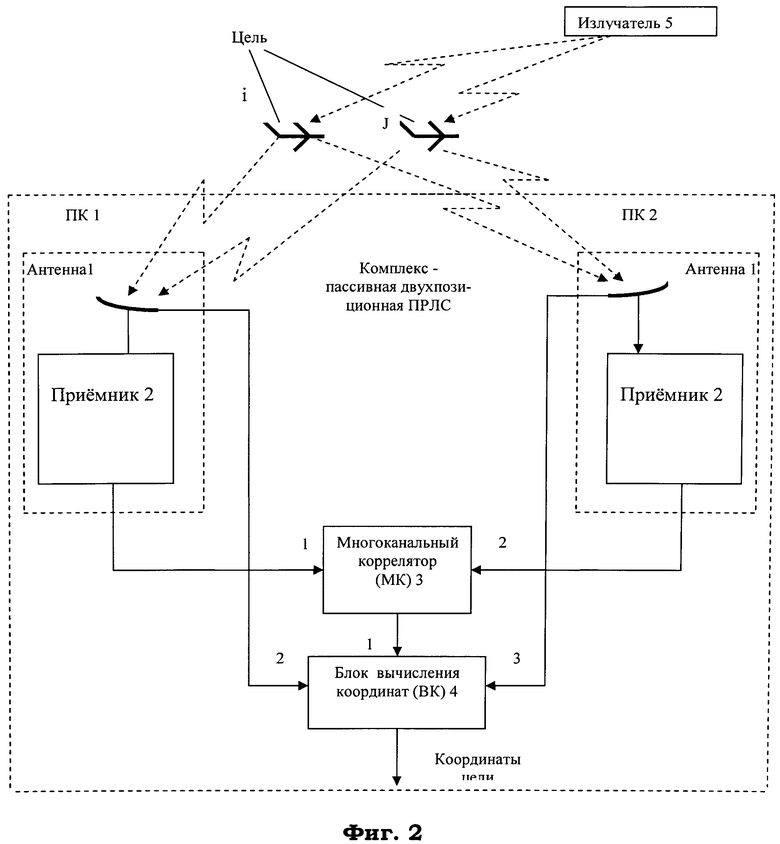
Известен наиболее близкий к предлагаемым вариантам комплекс, представляющий собой двухпозиционную радиолокационную станцию (Теоретические основы радиолокации. Под ред. Я.Д. Ширмана. М., Сов. Радио, 1970, с.500), реализующий наиболее близкий известный способ (Фиг.2), содержащий разнесенные в пространстве ПК 1 и ПК 2, каждый из которых включает антенну 1 и приемник 2, а также содержит блок - многоканальный коррелятор (МК) 3 и блок вычисления координат целей (ВК) 4. Выходы антенн 1 подключены к входам приемников 2, а их выходы подключены к первому и второму входам блока МК 3 соответственно, выход его подключен к первому входу блока ВК 4, а координатные выходы антенн 1 ПК 1 и ПК 2 подключены ко второму и третьему входам блока ВК 4 соответственно.
Комплекс работает следующим образом: сигнал, отраженный от цели, облучаемой внешним источником излучений 5, принимают антеннами 1 и подают соответственно на входы приемников 2 ПК 1 и ПК 2, а с их выходов сигналы поступают на соответствующие входы МК 3, в котором происходит идентификация цели по наличию корреляции принятых от нее сигналов обоими ПК. При этом на второй и третий входы блока ВК 4 поступают сигналы с координатных выходов антенн 1 ПК 1 и ПК 2 и сигнал с выхода МК 3 на первый вход ВК 4, по которым в блоке ВК 4 определяют координаты конкретной цели.
Достоинством этих известных способа и комплекса является определение угловых координат и дальности при скрытности его работы и простота его реализации при наличии в зоне, облучаемой посторонним источником излучений, одной цели.
Недостатком наиболее близких способа и комплекса является значительное усложнение реализации способа при увеличении числа целей (источников излучений или источников отражений) (там же, с.495, последний абзац). При этом, кроме необходимости увеличения числа разнесенных в пространстве ПК будут увеличиваться затраты времени на определение координат целей при последовательном согласованном осмотре угловых направлений одновременно несколькими ПК, а это при использовании внешнего источника излучений создает нестабильность функционирования способа и возможность пропуска целей.
Кроме того, недостаток заключается еще и в том, что из-за неизвестных параметров сигналов источников излучений невозможно обеспечить квазисогласованный прием, что снижает дальность обнаружения цели, а из-за непредсказуемой работы случайного источника излучений использование пассивного режима обнаружения целей по отражениям от целей сигналов, излучаемых источником, может быть лишь эпизодическим.
Таким образом, решаемой задачей (техническим результатом) является измерение дальности до обнаруженной цели, находящейся на большом удалении при сохранении скрытности работы и без затрат энергии на излучение.
Поставленная задача (технический результат) решается тем, что в первом варианте способа определения координат целей, облучаемых внешним источником радиоизлучения, основанном на определении угловых координат цели по отраженному ею радиоизлучению с помощью пассивной радиолокационной станции, согласно изобретению в качестве источника радиоизлучения выбирают расположенную в прямой видимости ПРЛС внешнюю радиолокационную станцию с известными ее координатами и облучающую просматриваемую зону, принимают и измеряют момент приема отраженного целью зондирующего сигнала и ее угловые координаты, а также принимают прямой зондирующий сигнал ВРЛС и вычисляют момент его излучения, на основе измеренного момента приема отраженного целью зондирующего сигнала и вычисленного момента его излучения вычисляют дальность до цели.
Поставленная задача (технический результат) по второму варианту решается тем, что в способе определения координат целей, облучаемых внешним источником радиоизлучения, основанном на определении угловых координат цели по отраженному ею радиоизлучению с помощью пассивной радиолокационной станции, согласно изобретению в качестве источника радиоизлучения выбирают внешнюю радиолокационную станцию с известными ее координатами и облучающую просматриваемую зону, с помощью бортовой радиолокационной станции (БРЛС), размещенной в зоне прямой видимости ВРЛС, принимают ее прямой зондирующий сигнал, вычисляют момент его излучения и вычисленное значение в едином времени передают на n≥1 ПРЛС, с помощью которых принимают и измеряют также в едином времени моменты приема отраженных целями зондирующих сигналов и их угловые координаты и на основе измеренных моментов приема отраженных целями зондирующего сигнала и принятого от БРЛС значения момента его излучения вычисляют дальность до целей.
Поставленная задача (технический результат) решается тем, что комплекс для определения координат целей по первому варианту, представляющий собой ПРЛС, содержащей два ПК и блок ВК, каждый канал содержит антенну и приемник, выходы антенн подключены к соответствующим входам приемников первого и второго каналов, координатные выходы антенн соединены с третьим и пятым входами блока ВК соответственно, согласно изобретению в состав ПРЛС введены блок вычисления момента излучения зонда (ВМИЗ), блок сопровождения цели (СЦ) и датчик единого времени (ДЕВ), выход приемника второго ПК соединен с первым входом блока ВМИЗ, выход приемника первого ПК соединен с первым входом блока ВК, выход блока ВМИЗ соединен со вторым входом блока ВК, его выход соединен с первым входом блока СЦ, выходы ДЕВ соединены с четвертым входом блока ВК, вторым входом блока ВМИЗ и вторым входом блока СЦ.
Поставленная задача (технический результат) решается тем, что комплекс для определения координат целей по второму варианту, содержащий ПРЛС, ПРЛС включает два ПК и блок ВК, каждый канал содержит антенну и приемник, выходы антенн подключены к соответствующим входам приемников первого и второго ПК, координатный выход антенны второго ПК соединен с третьим входом блока ВК, согласно изобретению в состав комплекса введены n>1 ПРЛС и бортовая радиолокационная станцию (БРЛС), а в состав ПРЛС введены блок вычисления задержки (ВЗ), блок СЦ и датчик единого времени ДЕВ, выходы которого соединены с третьим входом блока ВЗ, со вторым входом блока ВК и со вторым входом блока СЦ, выход приемника второго ПК соединен с первым входом блока ВЗ, выход приемника первого ПК соединен со вторым входом блока ВЗ, а его выход соединен с первым входом блока ВК, выход которого соединен с первым входом блока СЦ, БРЛС включает блок вычисления момента излучения зонда ВРЛС.
Суть заявленного способа по первому варианту, (Фиг.3), заключается в том, что в качестве внешнего источника излучения выбирают ВРЛС, находящуюся в прямой видимости ПРЛС, расположенной на возвышении (на вышке, горе, дирижабле, самолете, спутнике и т.п.). Координаты ВРЛС точно известны и заранее определены параметры сигнала. Выбор в качестве внешнего источника излучений ВРЛС дает следующие преимущества:
- легко вскрыть структуру сигнала и обеспечить квазисогласованный прием;
- квазисогласованный прием сигналов ВРЛС позволяет увеличить дальность обнаружения и определять координаты цели с требуемой точностью и разрешающей способностью;
- обеспечивает стабильность работы, поскольку в задачи ВРЛС входит постоянный контроль пространства;
- маловероятна постановка помех с противоборствующей стороны, так как помехи будут воздействовать на ВРЛС;
- ЭПР цели существенно возрастает, если она находится вблизи линии, соединяющей ПРЛС и РЛС, а это позволяет увеличить дальность обнаружения (Справочник по радиолокации. Под ред. М. Скольника, т.4, стр.209);
- мощность излучения достаточна для обнаружения малоразмерных целей, например, при выборе в качестве ВРЛС станции ПРО, размещаемой в Европе.
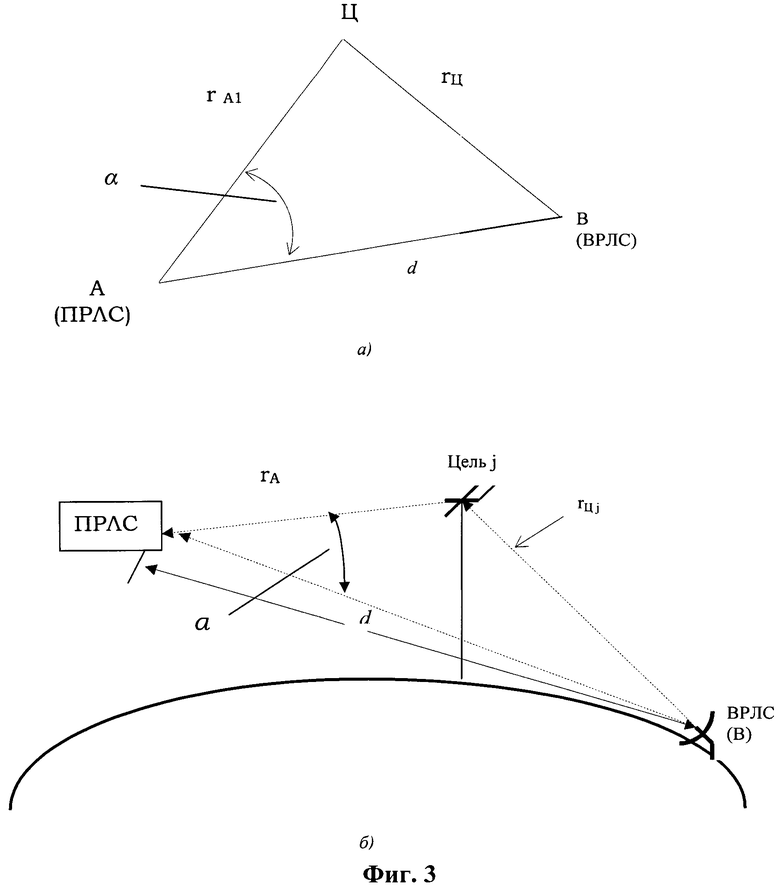
Для определения дальности до цели определяют направление на цель, определяют момент излучения сигнала ВРЛС по известной дальности до нее и моменту прямого приема ее зонда, вычисляют дальность до нее по формуле (3), вывод которой приведен ниже:
1. По определенному углу α между направлением на цель (Фиг.3) и направлением на ВРЛС, прямой задержке ΔT сигнала, излученного ВРЛС и принятого ПК 2 и рассчитанной по известной дальности d, определенной задержке τ отраженного от цели сигнала относительно прямой задержки ΔT сигнала, излученного ВРЛС, вычисляют дальность с помощью блока ВК до этой цели в полярных координатах по следующим формулам:

где C - скорость света; 
rЦ - расстояние от ВРЛС до цели;
a=arcos Cosβ×Cosε.
2. По известному в едином времени моменту приема tпр и вычисленному значению ΔT определяют момент излучения зонда tз по формуле:

где (τА+τЦ) - суммарное время распространения зонда ВРЛС до цели и от нее до ПРЛС; 
3. Вычисляют расстояние rAj до j-й цели, при j=2…n (Фиг. 3,б), по формуле (3), выведенной путем решения двух уравнений, полученных из треугольника АЦВ:

где tпрj - момент приема сигнала, отраженного от j-той цели в едином времени.
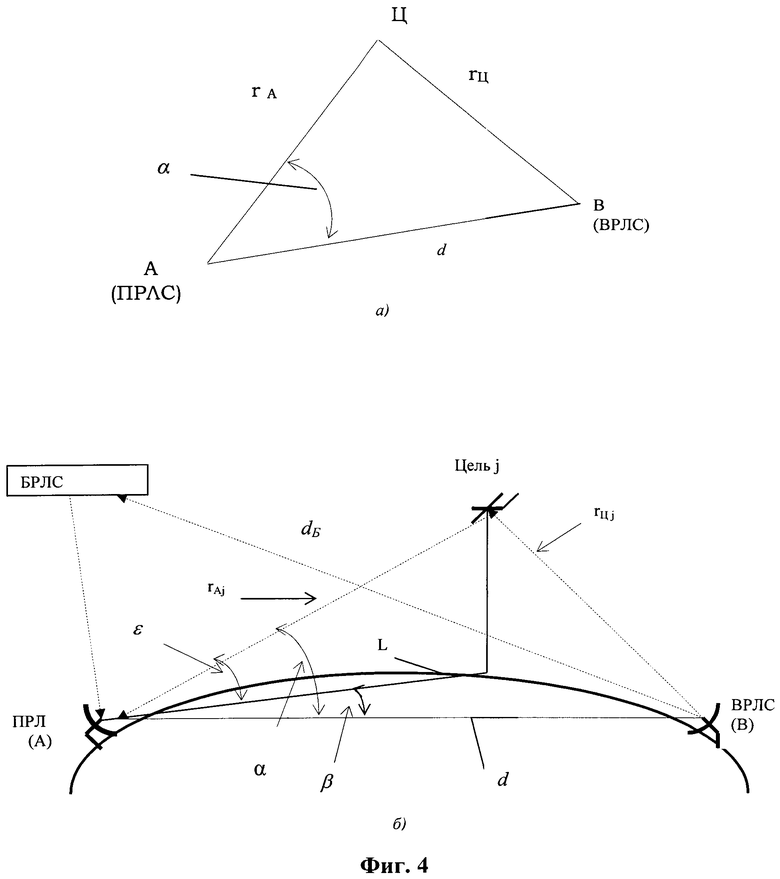
Суть заявленного способа по второму варианту (Фиг.4) заключается в том, что в качестве внешнего источника излучения выбирают ВРЛС, находящуюся в прямой видимости БРЛС. Ее координаты точно известны и заранее определены параметры сигнала. При известных параметрах сигнала ВРЛС возможен квазисогласованный прием, что позволяет повысить дальность обнаружения целей, облучаемых этой ВРЛС. Для определения дальности до цели вначале определяют момент излучения сигнала ВРЛС по известной дальности от БРЛС до ВРЛС и моменту прямого приема ее зонда БРЛС с помощью ее блока ВМИЗ, с помощью ПРЛС определяют направление на цель и вычисляют дальность до нее по формуле (3), аналогично вычислениям первого варианта. Отличие состоит в том, что:


где R - радиус Земли; L - длина дуги по поверхности Земли от пунктов А (ПРЛС) до пункта В (ВРЛС); dБ - расстояние от ВРЛС до БРЛС.
Полученную информацию передают на n≥1 ПРЛС.
Изобретение иллюстрируется чертежами:
фиг.1 - ПРЛС, реализующая способ-аналог;
фиг.2 - комплекс, реализующий способ-прототип;
фиг.3 - диаграммы, поясняющие работу предлагаемого способа по первому варианту;
Фиг.4 - диаграммы, поясняющие работу предлагаемого способа по второму варианту;
Фиг.5 - комплекс, реализующий предлагаемый способ по первому варианту;
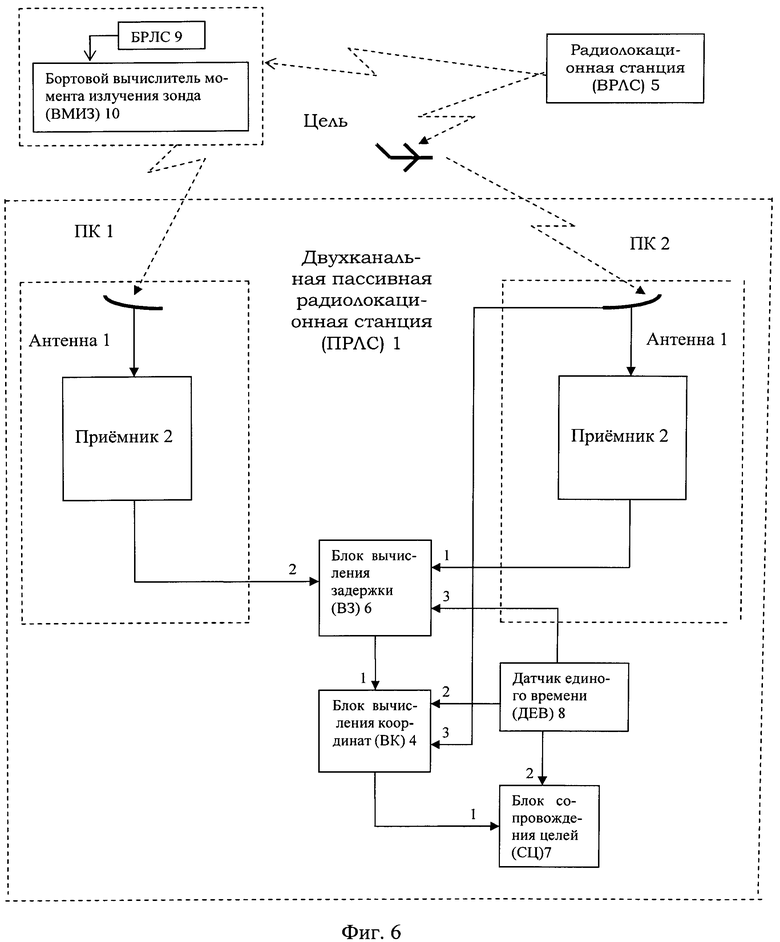
фиг.6 - комплекс, реализующий предлагаемый способ по второму варианту.
Рассмотрим более подробно реализуемость способа и комплекса по первому и второму вариантам на конкретных примерах.
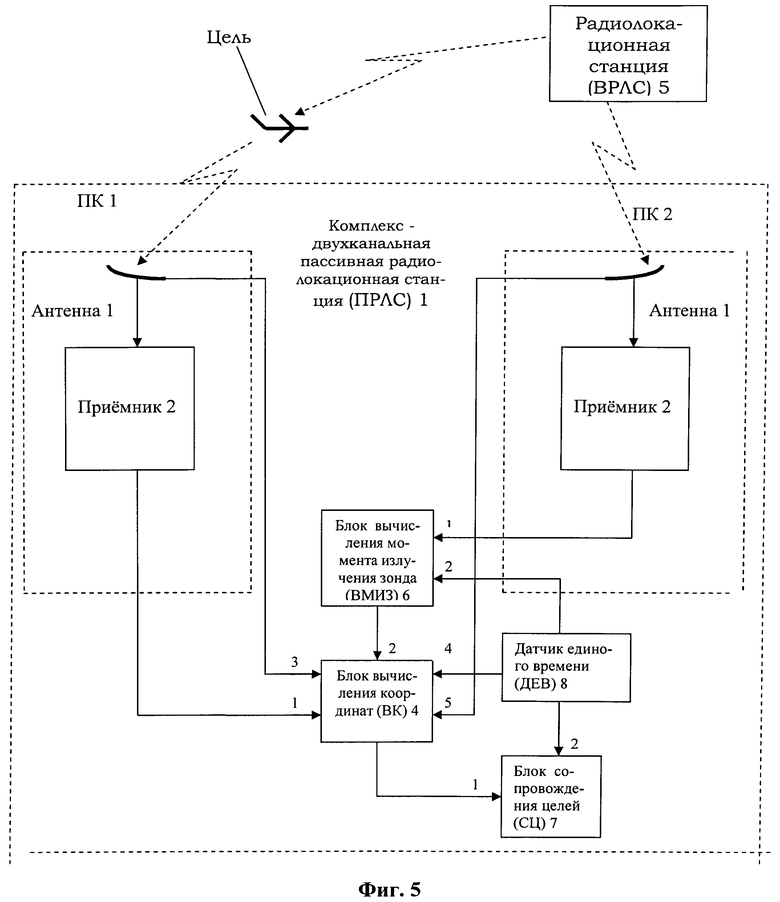
Заявленный комплекс, реализующий заявленный способ определения координат целей по первому варианту (Фиг.5), включающий ПРЛС1, которая содержит два канала - ПК1 и ПК2 и блок ВК 4, каждый канал содержит антенны 1 и приемники 2, выходы каждой антенны 1 подключены к соответствующим входам приемников 2 каналов ПК 1 и ПК 2, координатные выходы этих антенн соединены с третьим и пятым входами блока ВК 4 соответственно, в состав ПРЛС1 введены блок ВМИЗ 6, блок СЦ 7 и датчик единого времени ДЕВ 8, выход приемника 2 канала ПК2 соединен с первым входом блока ВМИЗ 6, выход приемника ПК1 соединен с первым входом блока ВК 4, выход блока ВМИЗ 6 соединен со вторым входов блока ВК 4, его выход соединен со входом блока СЦ 7, выходы ДЕВ 8 соединены с четвертым входом блока ВК 4, вторым входом блока ВМИЗ 6 и вторым входом блока СЦ 7.
Комплекс работает следующим образом. Точно известно относительное расположение ПРЛС 1 и ВРЛС 5. Сигнал, излученный ВРЛС 5, принимают антенной 1 канала ПК 2 и после усиления в приемнике 2 сигнал подают на первый вход блока ВМИЗ 6, где производят вычисление момента излучения зонда ВРЛС 5. С помощью канала ПК1, направленной антенны 1 этого канала и вычисленному с помощью блока ВМИЗ 6 моменту излучения зонда в блоке ВК 4 вычисляют дальность до цели по формуле (3).
Заявленный комплекс, реализующий заявленный по второму варианту способ определения координат целей (Фиг.6), содержит n≥1 ПРЛС и бортовую радиолокационную станцию БРЛС 9, каждая ПРЛС включает два приемных канала ПК 1 и ПК 2, блок ВК 4, блок ВЗ 6, блок СЦ 7 и датчик единого времени ДЕВ 8, каждый приемный канал содержит антенну 1 и приемник 2, выходы антенн 1 подключены к соответствующим входам приемников 2 ПК 1 и ПК 2, выходы ДЕВ 8 соединены соответственно с третьим входом блока ВЗ 6, со вторым входом блока ВК 4 и со вторым входом блока СЦ 7, выход приемника 2 ПК 2 соединен с первым входом блока ВЗ 6, выход приемника 2 ПК 1 соединен со вторым входом блока ВЗ 6, а его выход соединен с первым входом блока ВК 4, выход которого соединен с первым входом блока СЦ 7, координатный выход антенны 1 ПК 2 соединен с третьим входом блока ВК 4, БРЛС 9 включает блок вычисления момента излучения зонда (ВМИЗ) 10.
Комплекс работает следующим образом. Точно известно относительное расположение ПРЛС 1, ВРЛС 5 и БРЛС 9. Сигнал, излученный ВРЛС 5, принимает БРЛС 9, с помощью БВМИЗ 10 вычисляет в едином времени момент излучения зонда ВРЛС 5 и передает эту информацию в виде радиосигнала на ПРЛС 1, в которой сигнал через антенну 1 канала ПК 1 поступает в приемник 2. С помощью антенны 1 канала ПК 2 ПРЛС 1 принимает сигнал, отраженный от цели, и после усиления в приемнике 2 этого канала сигнал поступает на первый вход блока ВЗ 6, на второй вход этого блока поступает сигнал с выхода приемника 2 канала ПК 1, соответствующий моменту излучения зонда ВРЛС 5. В едином времени определяется задержка сигнала, отраженного от цели, относительно момента излучения зонда ВРЛС 5. Эта информация поступает в блок В К 4, в котором вычисляются координаты цели по формуле (3). При наличии нескольких ПРЛС сигнал о моменте излучения зонда в едином времени от БРЛС 9 передается на каждую ПРЛС.
Таким образом решается поставленная задача и достигается заявленный технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2538105C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2530808C1 |
| СПОСОБ РАСПОЗНАВАНИЯ СИГНАЛОВ ИСТОЧНИКА ИМПУЛЬСНОЙ ПОМЕХИ (ВАРИАНТЫ) И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2013 |
|
RU2538195C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ЦЕЛЕЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2524923C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |
| Способ сопровождения траектории цели в активно-пассивной радиолокационной системе | 2021 |
|
RU2769566C2 |
| Способ определения координат летательного аппарата относительно взлётно-посадочной полосы | 2016 |
|
RU2620587C1 |
| СИСТЕМА КОНТРОЛЯ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1994 |
|
RU2092887C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ (ВАРИАНТЫ) И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2298805C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2226701C2 |
Изобретения относятся к области радиолокации. Достигаемый технический результат - измерение дальности до обнаруженной цели, находящейся на большом удалении, при сохранении скрытности работы и без затрат энергии на излучение. Указанный результат достигается тем, что в первом варианте способа определения координат целей, основанном на определении угловых координат цели по отраженному ею радиоизлучению с помощью пассивной радиолокационной станции (ПРЛС), согласно изобретению в качестве источника радиоизлучения выбирают расположенную в прямой видимости ПРЛС внешнюю радиолокационную станцию (ВРЛС) с известными ее координатами и облучающую просматриваемую зону, принимают и измеряют момент приема отраженного целью зондирующего сигнала и ее угловые координаты, а также принимают прямой зондирующий сигнал ВРЛС и вычисляют момент его излучения, на основе измеренного момента приема отраженного целью зондирующего сигнала и вычисленного момента его излучения вычисляют дальность до цели. Указанный технический результат по второму варианту достигается тем, что в способе определения координат целей, основанном на определении угловых координат цели по отраженному ею радиоизлучению с помощью ПРЛС, согласно изобретению в качестве источника радиоизлучения выбирают внешнюю радиолокационную станцию (ВРЛС) с известными ее координатами и облучающую просматриваемую зону, с помощью бортовой радиолокационной станции (БРЛС), размещенной в зоне прямой видимости ВРЛС, принимают ее прямой зондирующий сигнал, вычисляют момент его излучения и вычисленное значение в едином времени передают на n≥1 ПРЛС, с помощью которых принимают и измеряют моменты приема отраженных целями зондирующих сигналов и их угловые координаты и на основе измеренных моментов приема отраженных целями зондирующего сигнала и принятого от БРЛС значения момента его излучения вычисляют дальность до целей. Указанный технический результат достигается также тем, что комплекс для определения координат целей по первому варианту представляет собой ПРЛС, которая содержит два приемных канала (ПК) и блок вычисления координат (ВК), каждый канал содержит антенну и приемник, ПРЛС содержит также блок вычисления момента излучения зонда, блок сопровождения цели и датчик единого времени. Все перечисленные средства определенным образом соединены между собой. Указанный технический результат достигается тем, что комплекс для определения координат целей по второму варианту представляет собой ПРЛС, при этом ПРЛС содержит два ПК и блок ВК, каждый канал содержит антенну и приемник, комплекс содержит также n>1 ПРЛС и бортовую радиолокационную станцию (БРЛС), а ПРЛС также содержит блок вычисления задержки, блок сопровождения цели и датчик единого времени. Все перечисленные средства определенным образом соединены между собой, при этом БРЛС включает блок вычисления момента излучения зонда ВРЛС. 4 н. п. ф-лы, 6 ил.
1. Способ определения координат целей, облучаемых внешним источником радиоизлучения, основанный на определении угловых координат цели по отраженному ею радиоизлучению с помощью пассивной радиолокационной станции (ПРЛС), отличающийся тем, что в качестве источника радиоизлучения выбирают расположенную в прямой видимости ПРЛС внешнюю радиолокационную станцию (ВРЛС) с известными ее координатами и облучающую просматриваемую зону, принимают и измеряют момент приема отраженного целью зондирующего сигнала и ее угловые координаты, а также принимают прямой зондирующий сигнал ВРЛС и вычисляют момент его излучения, на основе измеренного момента приема отраженного целью зондирующего сигнала и вычисленного момента его излучения вычисляют дальность до цели.
2. Комплекс для определения координат целей, представляющий собой пассивную радиолокационную станцию (ПРЛС), содержащую два приемных канала (ПК) и блок вычисления координат (ВК), каждый канал содержит антенну и приемник, выходы антенн подключены к соответствующим входам приемников первого и второго каналов, координатные выходы антенн соединены с третьим и пятым входами блока ВК соответственно, отличающийся тем, что в состав ПРЛС введены блок вычисления момента излучения зонда (ВМИЗ), блок сопровождения цели (СЦ) и датчик единого времени (ДЕВ), выход приемника второго ПК соединен с первым входом блока ВМИЗ, выход приемника первого ПК соединен с первым входом блока ВК, выход блока ВМИЗ соединен со вторым входом блока ВК, его выход соединен с первым входом блока СЦ, выходы ДЕВ соединены с четвертым входом блока ВК, вторым входом блока ВМИЗ и вторым входом блока СЦ.
3. Способ определения координат целей, облучаемых внешним источником радиоизлучения, основанный на определении угловых координат цели по отраженному ею радиоизлучению с помощью пассивной радиолокационной станции (ПРЛС), отличающийся тем, что в качестве источника радиоизлучения выбирают внешнюю радиолокационную станцию (ВРЛС) с известными ее координатами и облучающую просматриваемую зону, с помощью бортовой радиолокационной станции (БРЛС), размещенной в зоне прямой видимости ВРЛС, принимают ее прямой зондирующий сигнал, вычисляют момент его излучения, вычисленное значение в едином времени передают на n≥1 ПРЛС, с помощью которых принимают и измеряют моменты приема отраженных целями зондирующих сигналов в едином времени и их угловые координаты, на основе измеренных моментов приема отраженных целями зондирующего сигнала и принятого от БРЛС значения момента его излучения вычисляют дальность до целей.
4. Комплекс для определения координат целей, содержащий пассивную радиолокационную станцию (ПРЛС), ПРЛС включает два приемных канала (ПК) и блок вычисления координат (ВК), каждый канал содержит антенну и приемник, выходы антенн подключены к соответствующим входам приемников первого и второго ПК, координатный выход антенны второго ПК соединен с третьим входом блока ВК, отличающийся тем, что в состав комплекса введены n>1 ПРЛС и бортовая радиолокационная станция (БРЛС), в состав ПРЛС введены блок вычисления задержки (ВЗ), блок сопровождения цели (СЦ) и датчик единого времени (ДЕВ), выходы которого соединены с третьим входом блока ВЗ, со вторым входом блока ВК и со вторым входом блока СЦ, выход приемника второго ПК соединен с первым входом блока ВЗ, выход приемника первого ПК соединен со вторым входом блока ВЗ, а его выход соединен с первым входом блока ВК, выход которого соединен с первым входом блока СЦ, БРЛС включает блок вычисления момента излучения зонда ВРЛС.
| Теоретические основы радиолокации | |||
| Под ред | |||
| ШИРМАНА Я.Д., Москва, Радио и Связь, 1970, с.500,фиг.2 | |||
| Сушильное устройство камерного типа для сушки, например, переплетных крышек | 1959 |
|
SU126474A1 |
| СПОСОБ ОЦЕНИВАНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ В УГЛОМЕРНОЙ ДВУХПОЗИЦИОННОЙ ПАССИВНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2004 |
|
RU2263927C2 |
| СПОСОБ КОНТРОЛЯ ВОЗДУШНОГО ПРОСТРАНСТВА, ОБЛУЧАЕМОГО ВНЕШНИМИ ИСТОЧНИКАМИ ИЗЛУЧЕНИЯ, И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2285939C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ | 2004 |
|
RU2265233C1 |
| EP 1925948 A1, 28.05.2008 | |||
| US 7119732 B1, 10.10.2006 | |||
| US 20070018884 A1, 25.01.2007 | |||
| WO 2006099800 A1, 28.09.2006 | |||

