ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное изобретение относится к визуализации структур в медицинских изображениях с использованием метода, известного как планарное преобразование криволинейных структур, и, в частности, к определению поверхности среза для визуализации объекта в данных изображения.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Для 3-мерных (3D) или 4-мерных (4D) данных изображения необходима функция проецирования, выполняющая отображение на 2-мерную (2D) плоскость изображения дисплея. Общие методы визуализации включают отображение планарных срезов (то есть поперечных срезов) данных изображения, методы проецирования, такие как проекции максимальной интенсивности (MIP) и методы объемного рендеринга на основе передаточных функций. Другими методами являются планарные и мультипланарные преобразования (MRP), описанные, например, в работе: S.E.J. Connor и C. Flis, «The contribution of high-resolution multiplanar reformats of the skull base to the detection of skull-base fractures», Клиническая радиология, том 60, издание 8, 2005, стр. 878-885, и их обобщение - планарное преобразование криволинейных структур (CPR) - описанное, например, в докладе: Armin Kanitsar, Dominik Fleischmann, Rainer Wegenkittl, Petr Felkel и Meister Eduard Gröller, CPR - curved planar reformation, Материалы конференции по Визуализации '02, Бостон, Массачусетс, РАЗДЕЛЫ: Раздел P1: медицинская визуализация, стр.37-44 (также доступном на http://www.cg.tuwien.ac.at/research/publications/2002/kanitsar-2002-CPRX/TR-186-2-02-06Paper.pdf), именуемые в дальнейшем как Ссылка 1. Задачей CPR является сделать сосудистую структуру видимой по всей длине в пределах одного изображения. С этой целью получают осевую линию структуры. Данная осевая линия и представляющий интерес произвольный вектор, выбираемый пользователем, определяют поверхность повторной выборки, как описано во введении к разделу 3 Способов CPR Ссылки 1. Повторно выбранные данные могут визуализироваться с использованием проецированного CPR, протяженного CPR или спрямленного CPR, как описано в разделах 3.1, 3.2 или 3.3 Ссылки 1, соответственно.
Проблема способа, описанного в Ссылке 1, заключается в том, что он основан на определении осевой линии, и, таким образом, способ разработан специфически для сосудистых структур и не может быть с легкостью адаптирован для визуализации других объектов, таких как человеческое сердце или мозг.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Было бы выгодным иметь систему, способную определять поверхность среза для визуализации объекта в данных изображения, причем объект представляет собой несосудистый объект.
Таким образом, в одном аспекте данного изобретения обеспечивается система визуализации объекта в данных изображения с использованием первой поверхности среза, связанной с моделью объекта, причем данная система содержит:
блок модели для адаптации данной модели к объекту в данных изображения;
блок поверхности для адаптации первой поверхности среза к адаптированной модели на основе связи между первой поверхностью среза и моделью; и
блок визуализации для вычисления изображения из данных изображения на основе адаптированной первой поверхности среза.
Первая поверхность среза может использоваться для определения среза данных изображения для визуализации полезных признаков объекта. Для вычисления изображения на основе данного среза данных изображения, определенного посредством первой поверхности среза, блоком визуализации может использоваться любой подходящий метод рендеринга, например, проекция максимальной интенсивности (MIP). Поскольку первая поверхность среза согласно данному изобретению связана с моделью, то положение, ориентация и/или форма поверхности определяется посредством модели, адаптированной к объекту в данных изображения. Преимущественно, адаптация модели к объекту в данных изображения и связь между первой поверхностью среза и моделью обеспечивают возможность адаптации первой поверхности среза к данным изображения. Таким образом, форма, ориентация и/или положение адаптированной первой поверхности среза основывается/основываются на форме, ориентации и/или положении адаптированной модели. Адаптация первой поверхности среза напрямую к объекту на основе признаков в данных изображения с целью достижения аналогичного эффекта была бы менее надежной и менее точной, поскольку поверхность содержит меньшее количество признаков объекта, чем модель.
В одном варианте осуществления, система дополнительно выполнена с возможностью использования второй поверхности среза, связанной с моделью объекта, причем:
блок поверхности дополнительно выполнен с возможностью адаптации данной второй поверхности среза к адаптированной модели на основе связи между второй поверхностью среза и моделью; и
изображение, вычисленное из данных изображения посредством блока визуализации, дополнительно основывается на данной адаптированной второй поверхности среза.
Таким образом, форма, ориентация и/или положение адаптированной второй поверхности среза также основывается на форме, ориентации и/или положении адаптированной модели и, следовательно, косвенно, на данных изображения.
В одном варианте осуществления системы, первая поверхность среза является жесткой и подвижно связана с моделью. Например, поверхность может представлять собой прямоугольник, а плоскость прямоугольника может определяться посредством трех неколлинеарных точек, определяемых признаками модели. Блок поверхности может быть выполнен с возможностью адаптации прямоугольника к модели так, чтобы (i) поверхность прямоугольника определялась посредством трех точек адаптированной модели, (ii) центр прямоугольника определялся посредством центра масс трех точек, и (iii) ось прямоугольника определялась посредством линии, получаемой из линейной регрессии к трем точкам адаптированной модели.
В одном варианте осуществления системы, первая поверхность среза является упругой. Например, поверхность может выполняться в виде сетки на поверхности, содержащей множество узлов. Соседствующие узлы могут взаимодействовать друг с другом посредством упругих сил. Упругие силы являются легкими для выполнения и вычисления. Дополнительно, упругие силы будут описывать ожидаемую деформацию поверхности, результирующую из деформации модели объекта. Однако специалисту в области техники будет в полной мере понятно, что в альтернативном варианте осуществления некоторые узлы могут взаимодействовать друг с другом посредством неупругих сил.
В одном варианте осуществления системы, первая поверхность среза содержит множество контрольных точек, жестко или упруго связанных с моделью. Например, положения множества контрольных точек могут основываться на признаках модели. В случае жесткой связи, координаты контрольных точек являются фиксированными относительно модели. В случае упругой связи, положения множества контрольных точек определяются посредством их упругого взаимодействия с моделью. Упругое взаимодействие может описываться посредством упругих сил, таких как гармонические силы. Поверхность может определяться посредством контрольных точек, используя, например, методы интерполяции. Специалисту будет понятно, что также возможно и использование неупругой связи.
В дополнительном аспекте данного изобретения, упомянутая система содержится в системе отчетности для создания отчета, причем данный отчет содержит изображение, вычисленное из данных изображения посредством блока визуализации, на основе адаптированной первой поверхности среза.
В дополнительном аспекте данного изобретения, система содержится в устройстве получения изображений.
В дополнительном аспекте данного изобретения, система содержится в рабочей станции.
В дополнительном аспекте данного изобретения, обеспечивается способ визуализации объекта в данных изображения с использованием первой поверхности среза, связанной с моделью объекта, причем данный способ содержит:
этап модели, на котором адаптируют модель к объекту в данных изображения;
этап поверхности, на котором адаптируют первую поверхность среза к адаптированной модели на основе связи между первой поверхностью среза и моделью; и
этап визуализации для вычисления изображения из данных изображения на основе адаптированной первой поверхности среза.
В дополнительном аспекте данного изобретения, обеспечивается компьютерный программный продукт для загрузки посредством компьютерного устройства, причем данный компьютерный программный продукт содержит инструкции для визуализации объекта в данных изображения с использованием первой поверхности среза, связанной с моделью объекта, данное компьютерное устройство содержит блок обработки и память, компьютерный программный продукт после загрузки обеспечивает вышеуказанный блок обработки возможностью выполнения операций:
адаптации модели к объекту в данных изображения;
адаптации первой поверхности среза к адаптированной модели на основе связи между первой поверхностью среза и моделью; и
вычисления изображения из данных изображения на основе адаптированной первой поверхности среза.
Специалистам в области техники будет в полной мере понятно, что два или более из вышеупомянутых вариантов осуществления, исполнений и/или аспектов данного изобретения могут комбинироваться любым, считающимся полезным, образом.
На основе настоящего описания специалистом в области техники могут выполняться модификации и вариации системы отчетности, устройства получения изображений, рабочей станции, способа и/или компьютерного программного продукта, соответствующие описанным модификациям и вариациям системы.
Специалист в области техники в полной мере поймет, что способ может применяться к многомерным данным изображения, например, к 3-мерным или 4-мерным изображениям, получаемым посредством различных способов получения, таких как, но не ограничиваясь этим, стандартная рентгеновская визуализация, компьютерная томография (CT), магнитно-резонансная визуализация (MRI), ультразвуковая эхография (US), позитронно-эмиссионная томография (PET), однофотонная эмиссионная компьютерная томография (SPECT) и ядерная медицина (NM).
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты данного изобретения станут очевидными из разъяснения относительно исполнений и вариантов осуществления, описываемых в настоящем документе, и со ссылкой на прилагаемые чертежи, в которых:
Фиг. 1 схематично демонстрирует блок-схему примера варианта осуществления системы;
Фиг. 2 иллюстрирует несколько примеров поверхностей срезов, определяемых относительно модели позвоночного столба;
Фиг. 3 демонстрирует изображение части позвоночного столба с грудными позвонками Т3, Т4, Т5 и Т6 на основе двух изображений срезов;
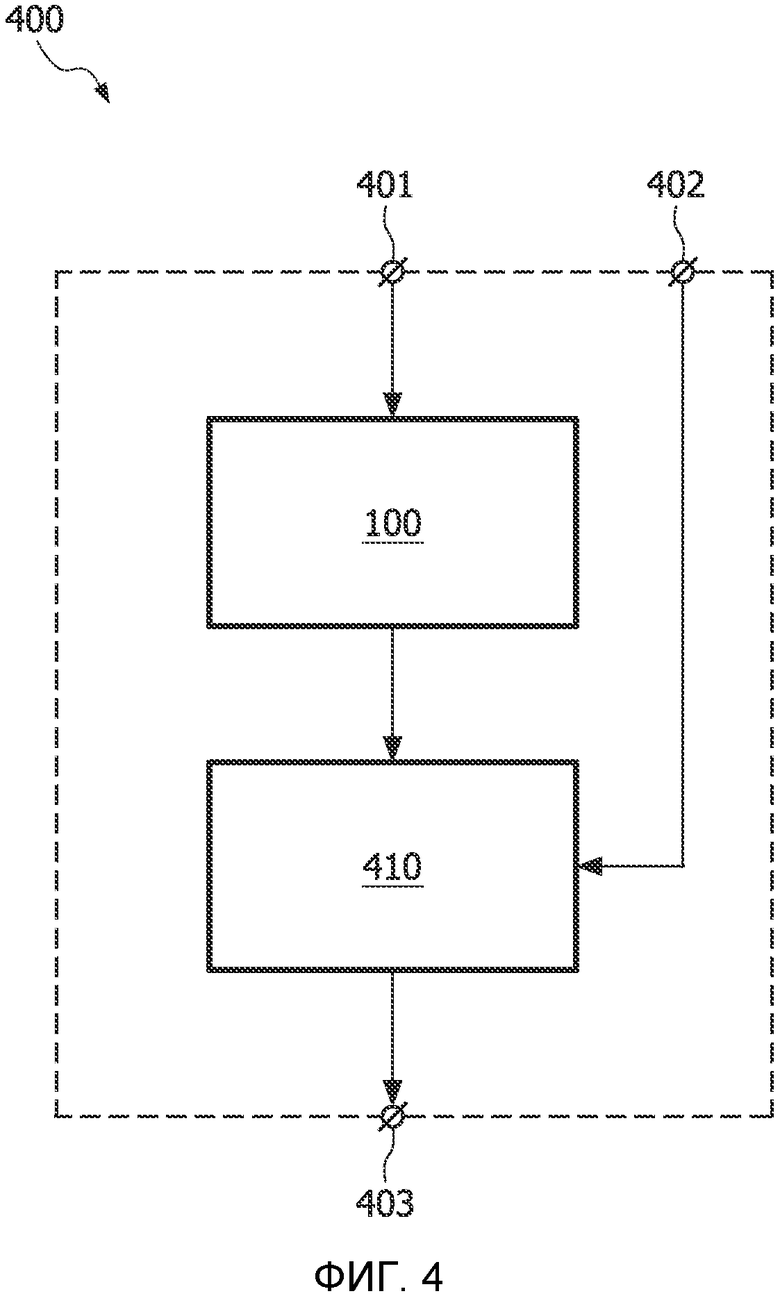
Фиг. 4 схематично демонстрирует пример варианта осуществления системы отчетности;
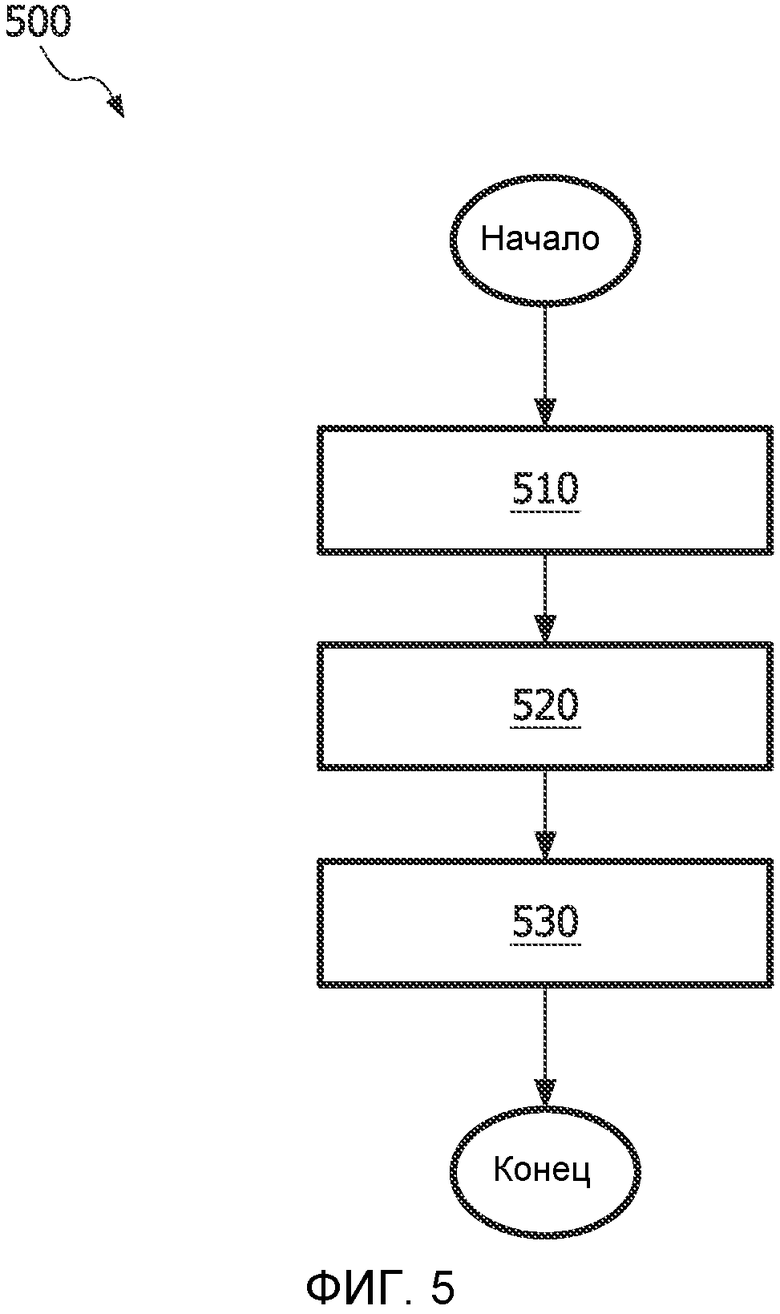
Фиг. 5 демонстрирует блок-схему последовательности операций примера варианта осуществления способа;
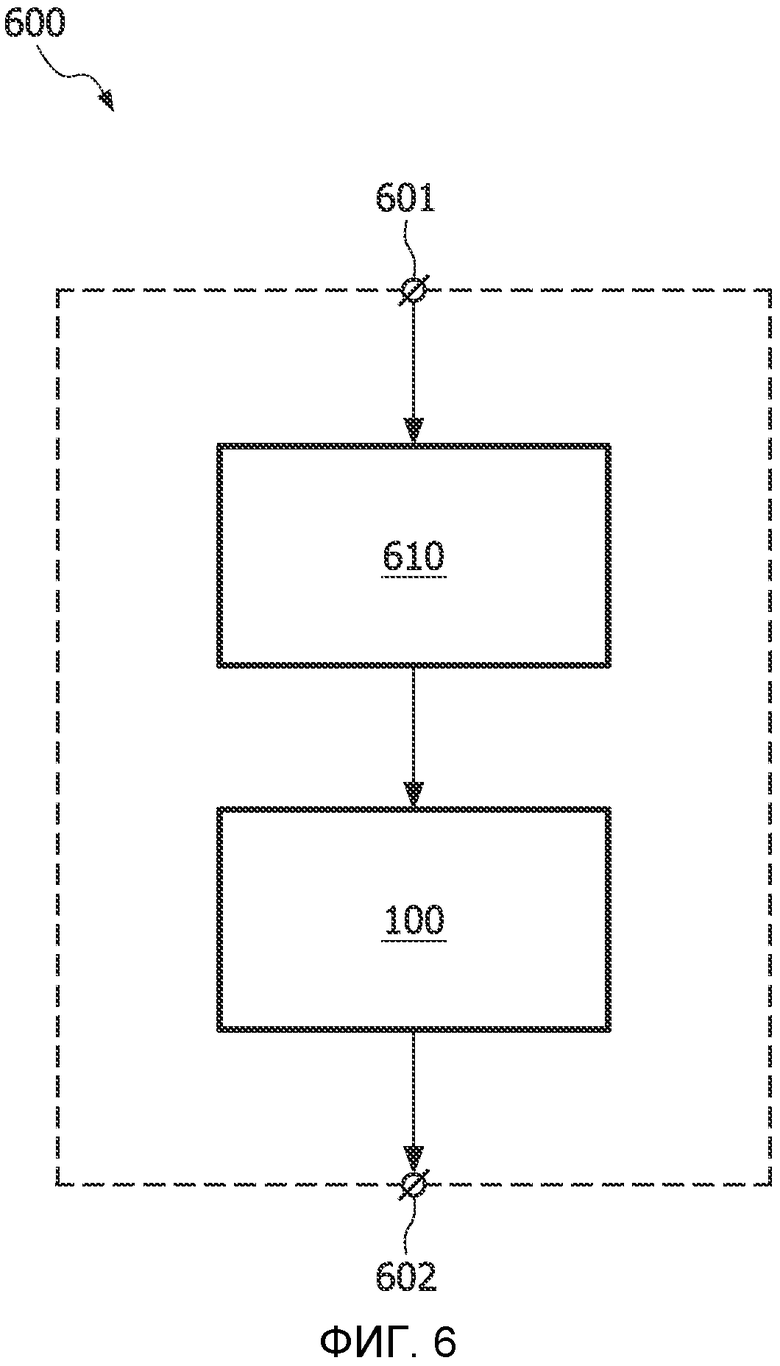
Фиг. 6 схематично демонстрирует пример варианта осуществления устройства получения изображений; и
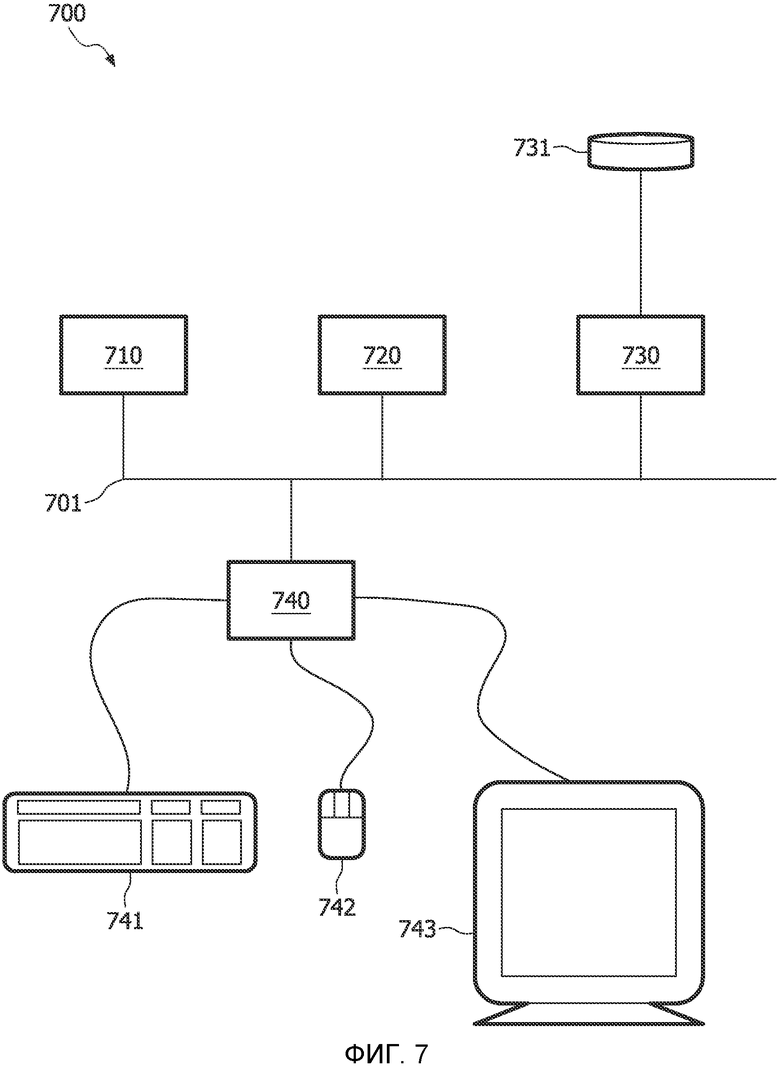
Фиг. 7 схематично демонстрирует пример варианта осуществления рабочей станции.
Для обозначения схожих частей на фигурах используются идентичные ссылочные обозначения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Фиг. 1 схематично демонстрирует блок-схему примера варианта осуществления системы 100 визуализации объекта в данных изображения с использованием первой поверхности среза, связанной с моделью объекта, причем данная система содержит:
блок 110 модели для адаптации данной модели к объекту в данных изображения;
блок 120 поверхности для адаптации первой поверхности среза к адаптированной модели на основе связи между первой поверхностью среза и моделью; и
блок 130 визуализации для вычисления изображения из данных изображения на основе адаптированной первой поверхности среза.
Пример варианта осуществления системы 100 дополнительно содержит следующие блоки:
блок 160 управления для управления потоком операций в системе 100;
интерфейс 165 пользователя для осуществления связи с пользователем системы 100; и
блок 170 памяти для хранения данных.
В одном варианте осуществления системы 100, имеются три входных разъема 181, 182 и 183 для входных данных. Первый входной разъем 181 выполнен с возможностью приема данных, поступающих из средства хранения данных, такого как, но не ограничиваясь этим, жесткий диск, магнитная лента, флэш-память или оптический диск. Второй входной разъем 182 выполнен с возможностью приема данных, поступающих от устройства ввода данных пользователем, такого как, но не ограничиваясь этим, мышь или сенсорный экран. Третий входной разъем 183 выполнен с возможностью приема данных, поступающих от устройства ввода данных пользователем, такого как клавиатура. Входные разъемы 181, 182 и 183 соединены с блоком 180 управления вводом.
В одном варианте осуществления системы 100, имеются два выходных разъема 191 и 192 для выходных данных. Первый выходной разъем 191 выполнен с возможностью вывода данных на средство хранения данных, такое как жесткий диск, магнитная лента, флэш-память или оптический диск. Второй выходной разъем 192 выполнен с возможностью вывода данных на устройство отображения. Выходные разъемы 191 и 192 принимают соответствующие данные посредством блока 190 управления выводом.
Специалист в области техники поймет, что существует много путей соединения устройств ввода с входными разъемами 181, 182 и 183, а также устройств вывода с выходными разъемами 191 и 192 системы 100. Данные пути содержат, но не ограничиваются этим, проводное и беспроводное соединение, цифровую сеть, такую как, но не ограничиваясь этим, локальная сеть (LAN), глобальная сеть (WAN), Интернет, цифровая телефонная сеть и аналоговая телефонная сеть.
В одном варианте осуществления системы 100, система 100 содержит блок 170 памяти. Система 100 выполнена с возможностью приема данных ввода от внешних устройств через любой из входных разъемов 181, 182 и 183 и сохранения принятых данных ввода в блоке 170 памяти. Загрузка данных ввода в блок 170 памяти предоставляет блокам системы 100 возможность быстрого доступа к соответствующим фрагментам данных. Данные ввода могут содержать, например, данные изображения. Блок 170 памяти может быть реализован посредством устройств, таких как, но не ограничиваясь этим, микросхема оперативной памяти (RAM), микросхема постоянной памяти (ROM), и/или накопитель на жестком диске и жесткий диск. Блок 170 памяти может быть дополнительно выполнен с возможностью сохранения данных вывода. Данные вывода могут содержать, например, изображение, вычисленное из данных изображения на основе адаптированной первой поверхности среза. Блок 170 памяти может также быть выполнен с возможностью приема данных от и/или доставки данных к блокам системы 100, содержащей блок 110 модели, блок 120 поверхности, блок 130 визуализации, блок 160 управления и интерфейс 165 пользователя, посредством шины 175 памяти. Блок 170 памяти дополнительно выполнен с возможностью предоставления доступа внешним устройствам к данным вывода через любой из выходных разъемов 191 и 192 вывода. Сохранение данных из блоков системы 100 в блоке 170 памяти может выгодно улучшать работу блоков системы 100, а также скорость передачи данных вывода из блоков системы 100 на внешние устройства.
В альтернативном варианте, система 100 может не содержать блок 170 памяти и шину 175 памяти. Данные ввода, используемые системой 100, могут поступать по меньшей мере с одного внешнего устройства, такого как внешняя память или процессор, соединенный с блоками системы 100. Схожим образом, данные вывода, создаваемые системой 100, можно выводить на по меньшей мере одно внешнее устройство, такое как внешняя память или процессор, соединенный с блоками системы 100. Блоки системы 100 могут быть выполнены с возможностью приема данных друг от друга через внутренние соединения или посредством шины данных.
В одном варианте осуществления системы 100, система 100 содержит блок 160 управления для управления потоком операций в системе 100. Блок управления может быть выполнен с возможностью приема данных управления из и обеспечения данных управления на блоки системы 100. Например, после адаптации модели к объекту в данных изображения блок 110 модели может быть выполнен с возможностью обеспечения данных управления «модель в процессе адаптации» на блок 160 управления, а блок 160 управления может быть выполнен с возможностью обеспечения данных управления «адаптация первой поверхности среза к модели» на блок 120 поверхности. В альтернативном варианте, функция управления может выполняться в блоке системы 100.
В одном варианте осуществления системы 100, система 100 содержит интерфейс 165 пользователя для осуществления связи с пользователем системы 100. Данный интерфейс 165 пользователя может быть выполнен с возможностью приема ввода пользователя для выбора модели и/или первой или второй поверхностей срезов, связанных с моделью. Интерфейс 165 пользователя может также обеспечивать пользователя информацией, например, он может отображать изображение, вычисленное из данных изображения на основе адаптированной первой поверхности среза. Дополнительно, интерфейс пользователя может принимать ввод пользователя для выбора режима работы системы, такой как, например, для выбора связывающих сил для связывания первой поверхности среза с моделью. Специалист в области техники поймет, что в интерфейсе 165 пользователя системы 100 может предпочтительно выполняться большее количество функций.
В одном варианте осуществления, система 100 используется с целью визуализации позвонков позвоночного столба пациента. Блок 110 адаптации выполнен с возможностью использования модели позвоночного столба, содержащей множество деформируемых моделей отдельных позвонков на сетке, и адаптации данных моделей отдельных позвонков на сетке к позвонкам объекта позвоночного столба в данных изображения КТ пациента. Модель для сегментации позвоночного столба описана, например, в работе: Tobias Klinder, Cristian Lorenz, Jens von Berg, Sebastian P. M. Dries, Thomas Büllow, Jörn Ostermann: Automated Model-Based Rib Cage Segmentation and Labeling in CT Images, материалы конференции MICCAI (2) 2007: стр. 195-202.
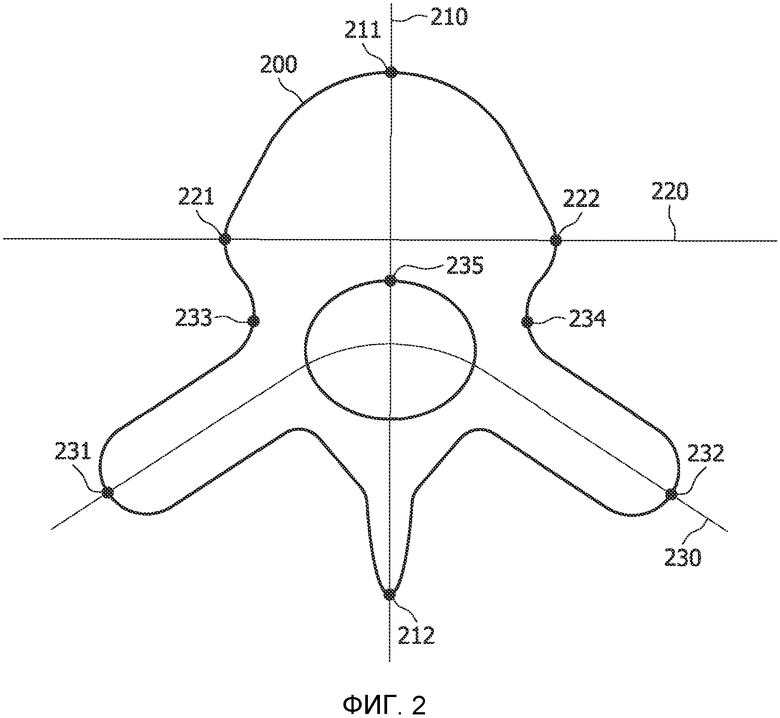
Блок 120 поверхности выполнен с возможностью адаптации первой и второй поверхности среза к адаптированной модели. Поскольку модель позвоночного столба является по существу симметричной, первая поверхность среза может представлять собой плоскость симметрии позвоночного столба. В альтернативном варианте, первая поверхность среза определяется посредством контрольных точек. Фиг. 2 иллюстрирует несколько примеров поверхностей срезов, определяемых относительно модели позвоночного столба на основе контрольных точек, расположенных на каждом позвонке модели. Фиг. 2 демонстрирует срез 200 позвонка по плоскости, по существу перпендикулярной по отношению к осевой линии спинного мозга и пересекающей тело позвонка по существу в середине его высоты. Для определения поверхностей срезов позвонков используется множество таких срезов позвонков, по одному срезу 200 позвонка из множества срезов позвонков для каждого позвонка модели. Первая поверхность 210 среза определяется парой контрольных точек 211 и 212 на каждом срезе 200 позвонка. Первая контрольная точка 211 расположена вверху тела позвонка, а вторая контрольная точка 212 расположена на конце остистого отростка. Вторая поверхность 220 среза является перпендикулярной по отношению к первой поверхности 210 среза и определяется посредством двух контрольных точек 221 и 222 на каждом срезе позвонка в положениях, находящихся на наибольшем расстоянии от первой поверхности среза, одна точка на левой стороне и одна точка на правой стороне тела позвонка. Расстояние между второй поверхностью среза и первой контрольной точкой 221 является таким же, как и расстояние между второй поверхностью среза и второй контрольной точкой 222. Третья поверхность 230 среза также является перпендикулярной по отношению к первой поверхности 210 среза и определяется посредством пяти контрольных точек 231, 232, 233, 234 и 235 на каждом срезе позвонка. Две контрольные точки 231 и 232 расположены по существу на концах поперечных отростков. Данные две точки находятся на поверхности среза. Две контрольные точки 233 и 234 расположены на каждом срезе позвонка в противоположных друг другу положениях, находящихся на наименьшем расстоянии от позвоночного отверстия, одна точка на левой дужке и другая точка на правой дужке. Данные две точки выполнены с возможностью привлечения третьей поверхности среза. Последняя контрольная точка 235 расположена на позвоночном отверстии и выполнена с возможностью отражения поверхности 230 среза.
В одном варианте осуществления, каждая поверхность среза является упругой. Минимальная энергия упругой деформации соответствует плоской поверхности среза. Контрольные точки 211, 212, 221, 222, 231 определяют некоторые ограничения поверхности. Данные точки могут легко скользить по своим соответствующим поверхностям срезов. Взаимодействие между третьей поверхностью среза и каждой из контрольных точек 233 и 234 основывается на потенциале, зависимом от квадрата расстояния между каждой точкой и третьей поверхностью среза. Взаимодействие между третьей поверхностью среза и контрольной точкой 235 основывается на потенциале, обратно пропорциональном расстоянию между данной точкой и третьей поверхностью среза. Поверхность среза соответствует минимуму суммарной потенциальной энергии.
После адаптации модели посредством блока 110 модели, находят новые положения контрольных точек на адаптированных моделях позвонков. Блок 120 поверхности вычисляет поверхность среза на основе этих новых положений контрольных точек и суммарной потенциальной энергии, создавая тем самым адаптированные поверхности срезов, соответствующие минимуму потенциальной энергии. Данные адаптированные поверхности срезов предоставляют возможность визуализации отдельных характеристик позвоночного столба пациента посредством блока 130 визуализации.
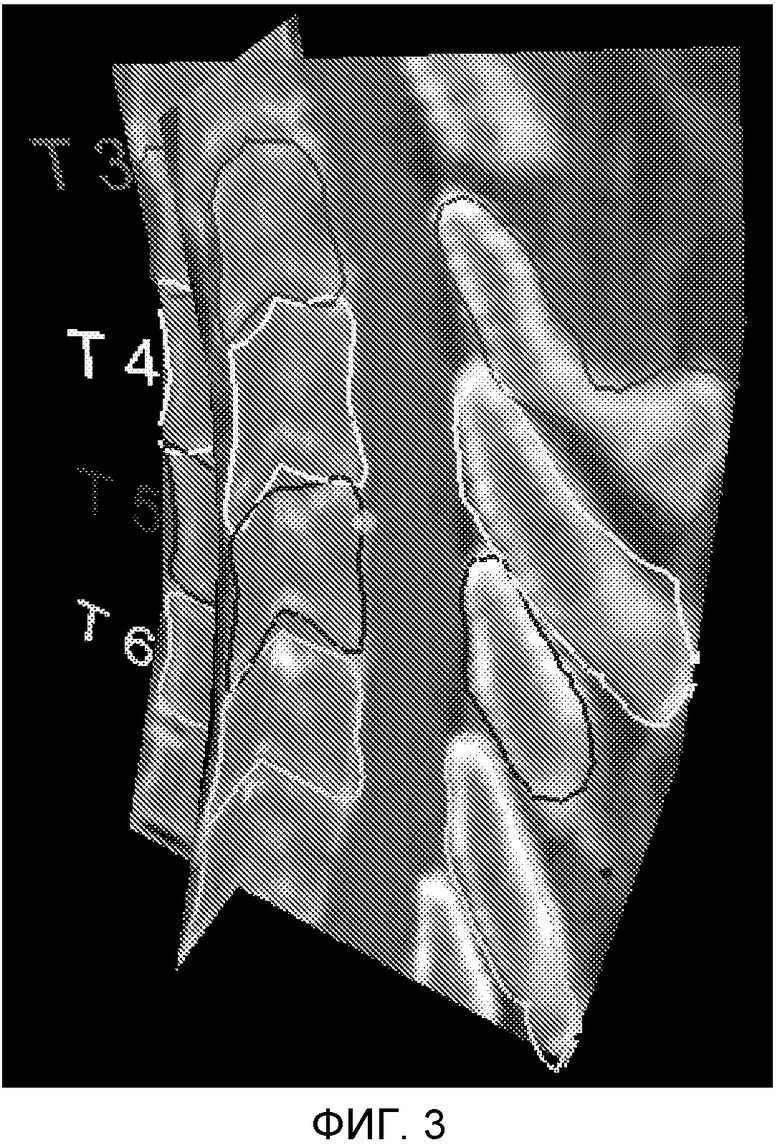
Фиг. 3 демонстрирует изображение части позвоночного столба с грудными позвонками Т3, Т4, Т5 и Т6. Данное изображение основано на двух изображениях срезов, определенных посредством первой и второй поверхности среза, определенных как описано со ссылкой на фиг. 2.
Для рендеринга интенсивности изображения, могут быть использованы различные способы рендеринга, такие как рейкастинг (метод бросания лучей), сплэттинг («бросание, разбрызгивание») пикселей или отображение текстур. В изображениях, демонстрируемых на фиг. 3, было следующим образом использовано отображение текстуры:
- во-первых, в качестве триангулированной поверхности представляется геометрия рендеринга;
- затем, в виде 2D изображения (так называемого изображения текстуры) собираются значения интенсивности изображения, соответствующие поверхности каждого отдельного треугольника; и
- наконец, вместе с геометрией треугольника и соответствующими изображениями текстуры обеспечивается механизм рендеринга (например, как часть графической карты или модуля рендеринга с программным обеспечением открытой графической библиотеки).
Специалист поймет, что данная система может быть полезной для отображения изображений планарных или криволинейных срезов различных анатомических структур, таких как, но не ограничиваясь этим, сердце, кровеносные сосуды и мозг.
Предпочтительно, система 100 может содержаться в системе 400 отчетности. Таким образом, изображения, вычисленные посредством блока 130 визуализации системы 100, могут включаться в медицинский отчет, создаваемый посредством блока 410 отчетности, вместе с аннотациями врача, изучавшего данные изображения. В одном варианте осуществления, система 400 отчетности содержит первый входной разъем 401 для системы отчетности для получения данных для системы 100 и второй входной разъем 402 для системы отчетности для получения других данных, таких как аннотации пользователя, имя и возраст пациента, результаты других тестов и обследований, комментарии врача, осуществляющего подготовку отчета, и так далее. Блок 410 отчетности выполнен с возможностью приема изображения, вычисленного посредством блока 130 визуализации системы 100, и других данных от второго ввода 402 для подготовки отчета. Данный отчет выводится через выходной разъем 403 системы отчетности.
Специалисты в области техники дополнительно поймут, что также возможны и другие варианты осуществления системы 100. Возможным является, среди всего прочего, повторно задать блоки системы и перераспределить их функции. Хотя описываемые варианты осуществления применяются к медицинским изображениям, также возможны и другие применения системы, не относящиеся к медицинским применениям.
Блоки системы 100 могут выполняться с использованием процессора. Обычно их функции выполняются под управлением программного продукта системы программного обеспечения. Во время выполнения, данный программный продукт системы программного обеспечения обычно загружается в память, такую как RAM, и с помощью нее приводится в действие. Программа может загружаться из фонового запоминающего устройства, такого как ROM, жесткий диск или запоминающее устройство на магнитном и/или оптическом носителе, или может загружаться через сеть, такую как Интернет. Дополнительно, описываемую функциональность может обеспечивать специализированная интегральная схема.
Фиг. 5 демонстрирует блок-схему последовательности операций примера варианта осуществления способа 500 визуализации объекта в данных изображения с использованием первой поверхности среза, связанной с моделью объекта. Способ 500 начинается с этапа 510 модели, на котором адаптируют модель к объекту в данных изображения. После этапа 510 модели, способ переходит к этапу 520 поверхности, на котором адаптируют первую поверхность среза к адаптированной модели на основе связи между первой поверхностью среза и моделью. После этапа 520 поверхности, способ переходит к этапу 530 визуализации, на котором вычисляют изображение из данных изображения на основе адаптированной первой поверхности среза. После этапа 530 визуализации, способ 500 завершается.
Специалист в области техники может менять порядок некоторых этапов или выполнять некоторые этапы параллельно, используя модели работы в потоках, многопроцессорные системы или множественные процессы, без отклонения от идеи согласно настоящему изобретению. Дополнительно, два или более этапов способа согласно настоящему изобретению могут быть скомбинированы в один этап. Например, этап 510 модели и этап 520 поверхности могут быть скомбинированы в один этап адаптации, содержащий множество частных этапов адаптации, причем каждый частный этап адаптации предусмотрен для адаптации модели к объекту в данных изображения с последующей адаптацией первой поверхности среза к модели, до тех пор пока количество частичных этапов адаптации не будет равным предварительно определенному количеству. Дополнительно, этап способа согласно настоящему изобретению может быть разделен на множество этапов.
Фиг. 6 схематично демонстрирует пример варианта осуществления устройства 600 получения изображений, использующего систему 100, причем указанное устройство 600 получения изображений содержит блок 610 получения изображений КТ, соединенный посредством внутреннего соединения с системой 100, входной разъем 601 и выходной разъем 602. Такая компоновка в предпочтительном варианте увеличивает возможности устройства 600 получения изображений, обеспечивая указанное устройство 600 получения изображений выгодными возможностями системы 100.
Фиг. 7 схематично демонстрирует пример варианта осуществления рабочей станции 700. Данная рабочая станция содержит системную шину 701. Процессор 710, память 720, адаптер 730 ввода/вывода (I/O) диска и интерфейс 740 пользователя (UI) функционально соединены с системной шиной 701. Дисковое устройство 731 хранения функционально соединено с адаптером 730 I/O диска. Клавиатура 741, мышь 742 и дисплей 743 функционально соединены с UI 740. Система 100 согласно данному изобретению, выполненная в виде компьютерной программы, сохраняется в дисковом устройстве 731 хранения. Рабочая станция 700 выполнена с возможностью загрузки программы и данных ввода в память 720 и выполнения программы процессором 710. Пользователь может вводить информацию в рабочую станцию 700, используя клавиатуру 741 и/или мышь 742. Рабочая станция выполнена с возможностью вывода информации на устройство 743 отображения и/или на диск 731. Специалист в области техники поймет, что существует множество других вариантов осуществления рабочей станции 700, известное в уровне техники, и что настоящий вариант осуществления служит в целях иллюстрирования данного изобретения и не должен интерпретироваться как ограничивающий данное изобретение этим конкретным вариантом осуществления.
Следует отметить, что вышеупомянутые варианты осуществления иллюстрируют, а не ограничивают данное изобретение, и что специалисты в области техники будут в состоянии создать альтернативные варианты осуществления, без отклонения от объема прилагаемой формулы изобретения. В формуле изобретения любые ссылочные обозначения, заключенные в скобки, не следует рассматривать как ограничивающие данную формулу изобретения. Термин «содержит» не исключает наличия элементов или этапов, не перечисленных в формуле изобретения или в описании. Формы единственного числа, представляющие элемент, не исключают наличие множества таких элементов. Данное изобретение может выполняться посредством аппаратного оборудования, содержащего несколько отдельных элементов, и посредством запрограммированного компьютера. В пунктах формулы изобретения, касающихся системы, перечисляющих некоторое количество блоков, некоторое количество из этих блоков может осуществляться посредством одного и того же элемента аппаратного оборудования или программного обеспечения. Использование числительных «первый», «второй», «третий» и так далее, не означает какое-либо упорядочивание. Данные числительные должны интерпретироваться в качестве названий.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОВРЕМЕННАЯ ОСНОВАННАЯ НА МОДЕЛИ СЕГМЕНТАЦИЯ ОБЪЕКТОВ, УДОВЛЕТВОРЯЮЩИХ ЗАРАНЕЕ ЗАДАННЫМ ПРОСТРАНСТВЕННЫМ СООТНОШЕНИЯМ | 2009 |
|
RU2505860C2 |
| ВЫБОР МОДЕЛИ АНАТОМИЧЕСКОГО ВАРИАНТА ДЛЯ СЕГМЕНТАЦИИ ИЗОБРАЖЕНИЯ | 2011 |
|
RU2609084C2 |
| ПЕРСОНАЛЬНАЯ И АВТОМАТИЧЕСКАЯ КОРРЕКТИРОВКА РЕНТГЕНОВСКОЙ СИСТЕМЫ НА ОСНОВЕ ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ИНТЕРПРЕТАЦИИ ТРЕХМЕРНОЙ СЦЕНЫ | 2013 |
|
RU2640566C2 |
| УСТРОЙСТВО СОВМЕЩЕНИЯ ИЗОБРАЖЕНИЙ | 2011 |
|
RU2595757C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ДЕКОРАТИВНЫХ ПАНЕЛЕЙ С НАДЛЕЖАЩИМ ЦВЕТОМ | 2019 |
|
RU2767019C1 |
| СЕГМЕНТАЦИЯ ПРИ МР-ВИЗУАЛИЗАЦИИ СЕРДЦА В ПРОЕКЦИИ ПО ДЛИННОЙ ОСИ С ПОЗДНИМ УСИЛЕНИЕМ КОНТРАСТА | 2009 |
|
RU2522038C2 |
| Система осуществления планирования и моделирования вариантов установки и прогнозирования успешности установки систем фиксации и эндопротезов элементов позвоночно-тазового комплекса | 2021 |
|
RU2802670C2 |
| КЛАССИФИКАЦИЯ ИЗОБРАЖЕНИЯ НА ОСНОВЕ СЕГМЕНТАЦИИ ИЗОБРАЖЕНИЯ | 2009 |
|
RU2513905C2 |
| СПОСОБ ВЫЧИСЛЕНИЯ ПЛАНА ХИРУРГИЧЕСКОЙ ОПЕРАЦИИ | 2014 |
|
RU2678080C2 |
| СИСТЕМА КОМБИНИРОВАННОЙ ВИЗУАЛИЗАЦИИ И РАБОЧАЯ СТАНЦИЯ С ПОДДЕРЖКОЙ СТРУКТУРИРОВАННОЙ ПРОВЕРКИ ГИПОТЕЗ | 2007 |
|
RU2481061C2 |
Группа изобретений относится к планарному преобразованию криволинейных структур. Технический результат заключается в обеспечении адаптации преобразований к разнообразным формам структур. Система содержит блок модели для адаптации модели к объекту в данных изображения, блок поверхности для адаптации данной первой поверхности среза к адаптированной модели на основе связи между первой поверхностью среза и моделью, и блок визуализации для вычисления изображения из данных изображения на основе адаптированной первой поверхности среза, которая используется для определения среза данных изображения с визуализацией полезных признаков объекта и вычисления изображения на основе данного среза данных. Причем форма, ориентация и/или положение адаптированной первой поверхности среза основывается/основываются на форме, ориентации и/или положении адаптированной модели. 6 н. и 6 з.п. ф-лы, 7 ил.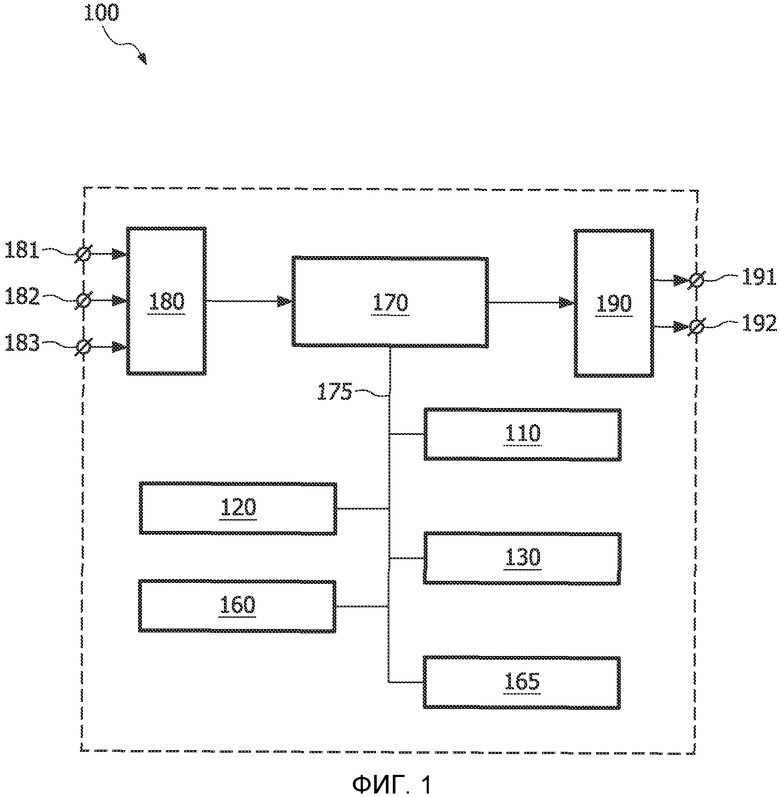
1. Система (100) визуализации объекта в данных изображения с использованием первой поверхности среза, связанной с деформируемой моделью объекта, при этом упомянутая модель содержит признаки объекта, причем данная система содержит:
блок (110) модели для адаптации данной модели к объекту в данных изображения;
блок (120) поверхности для адаптации первой поверхности среза к адаптированной модели на основе связи между первой поверхностью среза и моделью; и
блок (130) визуализации для вычисления изображения из данных изображения на основе адаптированной первой поверхности среза.
2. Система (100) по п.1, дополнительно выполненная с возможностью использования второй поверхности среза, связанной с моделью объекта, и в которой:
блок (120) поверхности дополнительно выполнен с возможностью адаптации данной второй поверхности среза к адаптированной модели на основе связи между второй поверхностью среза и моделью; и
изображение, вычисленное из данных изображения посредством блока (130) визуализации, дополнительно основывается на упомянутой адаптированной второй поверхности среза.
3. Система (100) по п.1, в которой первая поверхность среза является жесткой и подвижно связана с моделью.
4. Система (100) по п.1, в которой первая поверхность среза является упругой.
5. Система (100) по п.1, в которой первая поверхность среза содержит множество контрольных точек, жестко или упруго связанных с моделью.
6. Система (400) отчетности для создания отчета, причем данная система (400) отчетности содержит систему (100) в соответствии с п.1 или 2, и данный отчет содержит изображение, вычисленное посредством блока (130) визуализации.
7. Устройство (600) получения изображений, содержащее систему (100) по п.1.
8. Рабочая станция (700), содержащая систему (100) по п.1.
9. Способ (500) визуализации объекта в данных изображения с использованием первой поверхности среза, связанной с деформируемой моделью объекта, при этом упомянутая модель содержит признаки объекта, причем данный способ содержит:
этап (510) модели, на котором адаптируют модель к объекту в данных изображения;
этап (520) поверхности, на котором адаптируют первую поверхность среза к адаптированной модели на основе связи между первой поверхностью среза и моделью; и
этап (530) визуализации для вычисления изображения из данных изображения на основе адаптированной первой поверхности среза.
10. Способ (500) по п. 9, дополнительно выполненный с возможностью использования второй поверхности среза, связанной с моделью объекта, и в котором:
этап (520) поверхности дополнительно предусмотрен для адаптации упомянутой второй поверхности среза к адаптированной модели на основе связи между второй поверхностью среза и моделью; и
изображение, вычисленное из данных изображения на этапе (530) визуализации, дополнительно основывается на упомянутой адаптированной второй поверхности среза.
11. Способ (500) по п.9, в котором первая поверхность среза содержит множество контрольных точек, жестко или упруго связанных с моделью.
12. Считываемый компьютером носитель для загрузки в компьютерное устройство, причем носитель содержит инструкции для реализации способа визуализации объекта в данных изображения с использованием первой поверхности среза, связанной с деформируемой моделью объекта, причем упомянутая модель содержит признаки объекта, при этом данное компьютерное устройство содержит блок обработки и память, а способ содержит этапы для выполнения:
адаптации модели к объекту в данных изображения;
адаптации первой поверхности среза к адаптированной модели на основе связи между первой поверхностью среза и моделью; и
вычисления изображения из данных изображения на основе адаптированной первой поверхности среза.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| СПОСОБ ПОЛУЧЕНИЯ ТОМОГРАФИЧЕСКОГО ИЗОБРАЖЕНИЯ МЕТОДОМ МАГНИТНОЙ ИНДУКЦИОННОЙ ТОМОГРАФИИ | 1996 |
|
RU2129406C1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

