Изобретение относится к области транспортного машиностроения, в частности к исполнительным механизмам в системах рулевого управления колесных транспортных средств.
Рулевое управление обеспечивает движение автомобиля в заданном направлении. Рулевое управление состоит из рулевого механизма и рулевых приводов поворота колес. Рулевой механизм служит для передачи на рулевые приводы поворота колес управляющих команд, сформированных водителем. Рулевой привод поворота колеса предназначен для усиления этой команды и обеспечения поворота колеса на заданный угол.
Из уровня техники известны рулевые приводы поворота колеса, в состав которых входят гидравлические цилиндры, штоки которых, через рычаги, связаны с поворотным суппортом колеса, вращающимся относительно поворотного кулака (см. Б.Н. Белоусов, СБ. Шухман. «Прикладная механика наземных тягово-транспортных средств». - М.: Агроконсалт, 2013, стр.453-455, рис.10.19-10.33, вкладка VI-3…7, а также US №2007/0131474 A1, B62D 7/00, 2007-06-14). Недостатком указанных рулевых приводов является переменная, зависящая от величины угла поворота колеса, величина плеча, через которое поступательное перемещение штока гидравлического цилиндра преобразуется в угловое перемещение колеса, что приводит к изменению, в зависимости от угла поворота колеса, момента, действующего относительно оси поворота колеса, при неизменном усилии на штоке (при больших углах поворота колеса значение момента стремится к нулю). Для того чтобы обеспечить заданный момент на всех углах поворота колеса, возникает необходимость в увеличении плеча, что приводит к увеличению хода штока для обеспечения заданного угла поворота колеса и к увеличению расхода рабочей жидкости для обеспечения заданной угловой скорости поворота колеса. В результате увеличиваются габариты исполнительного механизма, возрастают энергетические затраты на его управление или ограничиваются углы поворота колеса.
Известен неполноповоротный исполнительный механизм, в состав которого входит двуплечий рычаг, преобразующий поступательное перемещение штока гидравлического цилиндра во вращательное выходного звена, рабочие поверхности двуплечего рычага выполнены по эвольвенте (см Патент RU 131430, дата публикации 20.08.2013 г., F15B 15/00). Преимущество такого механизма заключается в постоянстве величины плеча, через которое поступательное перемещение штока гидравлического цилиндра преобразуется в угловое перемещение выходного звена. Это обстоятельство обеспечивает независимость от угла поворота выходного звена момента, действующего относительно оси вращения выходного звена, при неизменном усилии на штоке. Однако недостатком этого механизма является объединение всех входящих в исполнительный механизм узлов в единый блок, поскольку это затрудняет или делает невозможным использование такого механизма в составе рулевого привода поворота колеса из-за его больших габаритов. Данное решение принято за прототип.
Предложенное решение позволяет устранить описанные выше недостатки и обеспечить достижение технического результата, заключающегося в уменьшении размеров рулевого привода поворота колеса и как следствие в уменьшении энергетических затрат на его управление без ограничения углов поворота колеса.
Сущность изобретения заключается в том, что все входящие в исполнительный механизм узлы не объединены в единый блок, а выполнены самостоятельно. Указанный технический результат достигается тем, что корпуса гидравлических цилиндров закреплены неподвижно в поворотном кулаке, а двуплечий рычаг закреплен неподвижно на поворотном суппорте колеса. Для специалистов очевидно, что при такой конструкции рулевого привода возникает необходимость защиты роликов и рабочей поверхности двуплечего рычага от попадания грязи и пыли. Для этой цели предусмотрен чехол замкнутого коробчатого сечения, одна сторона которого закреплена на поворотном кулаке, а вторая - на поворотном суппорте колеса.
Сущность изобретения поясняется чертежами.
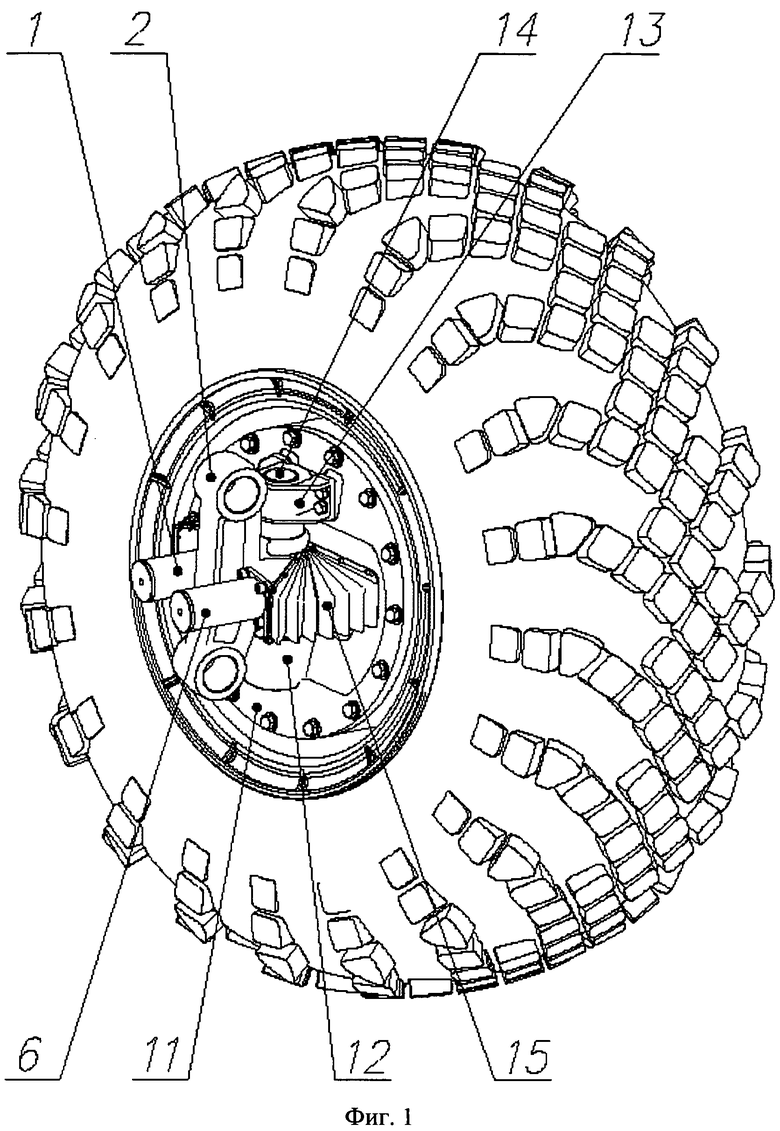
На Фиг.1 приведен общий вид колеса с рулевым приводом поворота колеса.
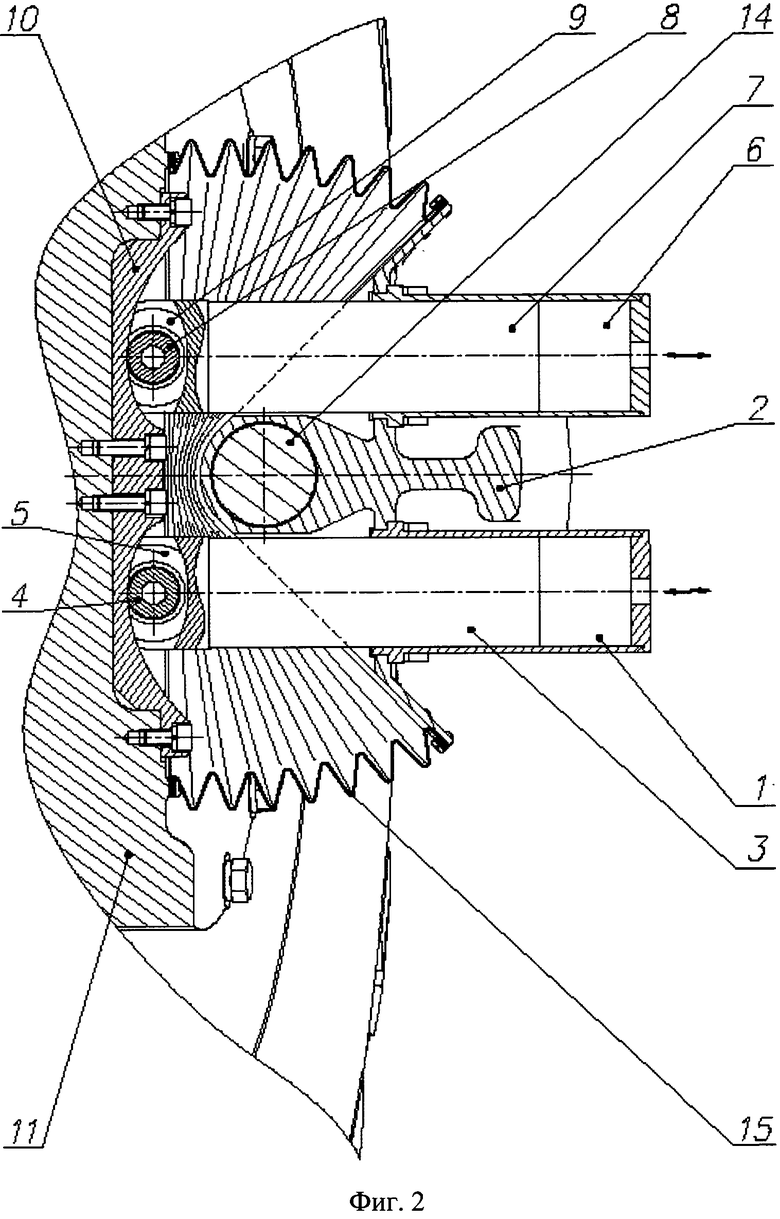
На Фиг.2 приведен разрез рулевого привода поворота колеса по плоскости, перпендикулярной оси поворота колеса, для среднего положения колеса.
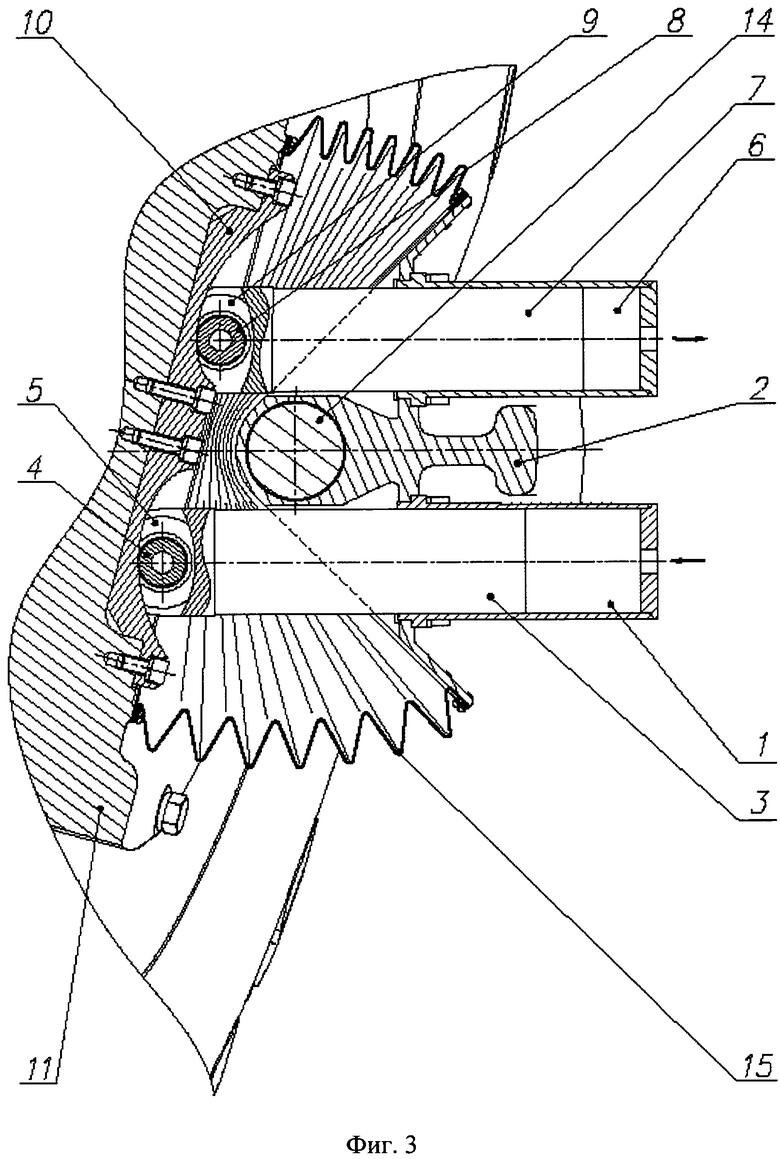
На Фиг.3 приведен разрез гидравлического цилиндра рулевого привода поворота колеса по плоскости, перпендикулярной оси поворота колеса, для колеса, повернутого по часовой стрелке.
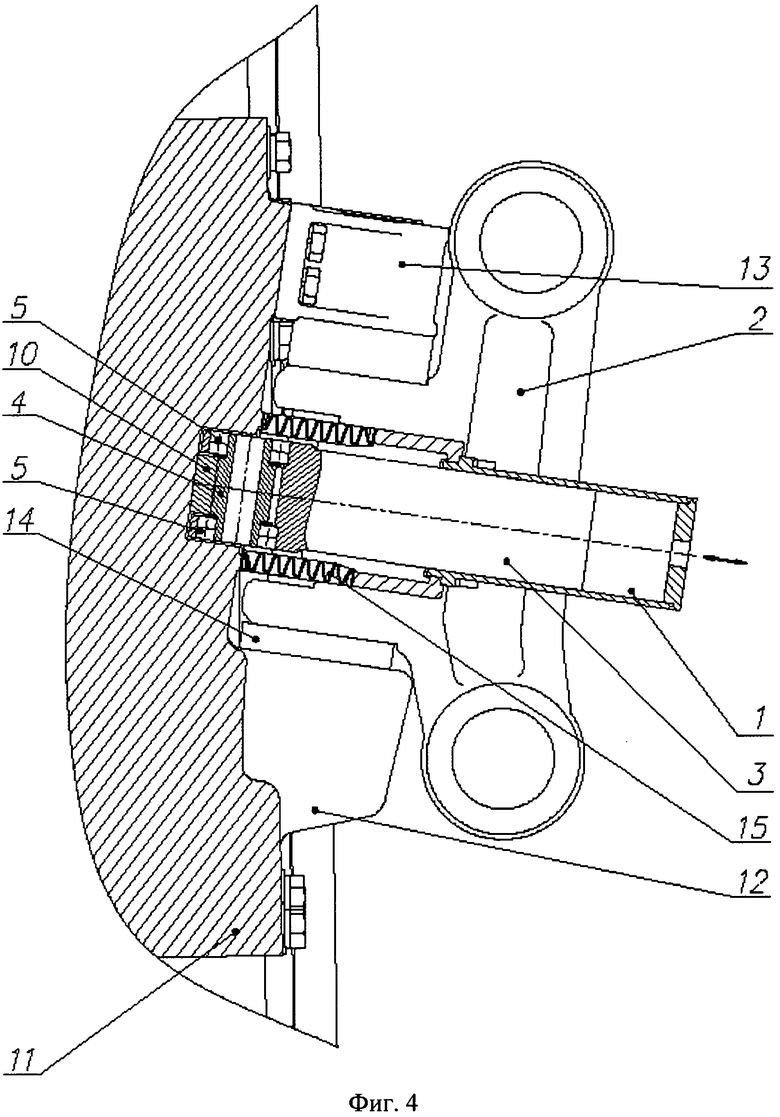
На Фиг.4 приведен разрез гидравлического цилиндра рулевого привода поворота колеса по плоскости, параллельной оси поворота колеса.
Рулевой привод поворота колеса включает гидравлические цилиндры 1 и 6, которые неподвижно закреплены в поворотном кулаке 2. Гидравлический цилиндр 1 содержит шток 3 с роликом 4, установленным в подшипниках 5, а гидравлический цилиндр 6 включает шток 7 с роликом 8, установленным в подшипниках 9, закрепленных в штоке 7. Двуплечий рычаг 10, рабочие поверхности которого выполнены по эвольвенте, неподвижно закреплен в поворотном суппорте колеса 11 с опорами 12 и 13, в которых подвижно крепится ось поворота колеса 14. Ось поворота колеса 14 связывает поворотный суппорт колеса 11 с поворотным кулаком 2. Рулевой привод включает защитный чехол замкнутого коробчатого сечения 15, одна сторона которого закреплена на поворотном кулаке 2, а вторая - на поворотном суппорте колеса 11.
Рулевой привод поворота колеса работает следующим образом.
В исходном положении штоки 3 и 7, связанный с ними через двуплечий рычаг 10 поворотный суппорт колеса 11, следовательно, колесо в целом находятся в среднем положении (см. фиг.2, фиг.4). При подключении рабочей полости гидравлического цилиндра 1 к линии нагнетания гидросистемы, а рабочей полости гидравлического цилиндра 6 к линии слива гидросистемы шток 3 начинает выдвигаться (см. Фиг.3, Фиг.4). Поступательное перемещение штока 3 передается через подшипники 5, ролик 4 двуплечему рычагу 10 и преобразуется в угловое перемещение по часовой стрелке поворотного суппорта 11 с опорами 12 и 13 и колеса в целом относительно оси поворота колеса 14. Одновременно угловое перемещение двуплечего рычага 10 преобразуется в поступательное движение ролика 8 и штока 7. При подключении рабочей полости гидравлического цилиндра 6 к линии нагнетания гидросистемы, а рабочей полости гидравлического цилиндра 1 к линии слива гидросистемы колесо поворачивается против часовой стрелки. Таким образом, поступательное перемещение поршней гидравлических цилиндров преобразуется в угловое перемещение колеса относительно поворотного кулака, при этом соотношения между линейными и угловыми параметрами (скорость, перемещение, усилие и момент) во всем диапазоне поворота колеса остаются неизменными.
Чехол замкнутого коробчатого сечения 15 при повороте колеса растягивается с одной стороны и сжимается с другой (см. Фиг.3), обеспечивая защиту от попадания грязи и пыли на ролики 4 и 8 и рабочие поверхности двуплечего рычага 10 на всех углах поворота колеса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рулевой привод управляемых ракеты и снаряда | 2017 |
|
RU2661944C1 |
| ШЛИФОВАЛЬНО-ОБДИРОЧНЫЙ СТАНОК | 1964 |
|
SU222895A1 |
| Мост ведущий управляемый комбинированный | 2023 |
|
RU2816386C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЭЛЕМЕНТОВ ПЕРЕДНЕЙ ПОДВЕСКИ ЛЕГКОВЫХ АВТОМОБИЛЕЙ | 2011 |
|
RU2483287C2 |
| Устройство для затылования | 1984 |
|
SU1199458A2 |
| Устройство к металлорежущему станку для обработки фасонных поверхностей инструментов | 1986 |
|
SU1371875A1 |
| АНТИБЛОКИРОВОЧНАЯ АНТИЗАНОСНАЯ ТОРМОЗНАЯ СИСТЕМА АЗОВО-ЧЕРНОМОРСКОЙ АГРОИНЖЕНЕРНОЙ АКАДЕМИИ ДЛЯ АВТОПОЕЗДОВ | 2002 |
|
RU2221716C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2794243C1 |
| Тормоз наката с механизмом стабилизации движения одноосного прицепа | 2023 |
|
RU2820724C1 |
| ГИДРОСИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ДЛЯ БОЛЬШЕГРУЗНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2016 |
|
RU2625695C1 |
Привод предназначен для систем рулевого управления колесных транспортных средств. В приводе корпуса гидравлических цилиндров закреплены неподвижно в поворотном кулаке, а двуплечий рычаг закреплен неподвижно на поворотном суппорте колеса. Для защиты роликов и рабочей поверхности двуплечего рычага от попадания грязи и пыли предусмотрен чехол замкнутого коробчатого сечения, одна сторона которого закреплена на поворотном кулаке, а вторая - на поворотном суппорте колеса. Технический результат - уменьшение размеров рулевого привода поворота колеса. 4 ил.
Рулевой привод поворота колеса, включающий гидравлические цилиндры, содержащие штоки с роликами, установленными в подшипниках, закрепленные в соответствующих штоках, поворотный кулак, двуплечий рычаг, рабочие поверхности которого выполнены по эвольвенте, отличающийся тем, что корпуса гидравлических цилиндров закреплены неподвижно в поворотном кулаке, двуплечий рычаг закреплен неподвижно на поворотном суппорте колеса, а чехол замкнутого коробчатого сечения одной стороной закреплен на поворотном кулаке, а второй - на поворотном суппорте колеса.
| Цилиндрическая трубчатая печь | 1959 |
|
SU131430A1 |
| РОТАЦИОННО-ПОРШНЕВАЯ МАШИНА, РУЛЕВОЙ ПРИВОД КОЛЕСА И ПРИВОД ВРАЩЕНИЯ КОЛЕСА С РОТАЦИОННО-ПОРШНЕВОЙ МАШИНОЙ | 2007 |
|
RU2426914C2 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2008 |
|
RU2378539C1 |
| US 3437166 A, 08.04.1969 | |||
| 1972 |
|
SU410942A1 | |

