Область техники, к которой относится изобретение
Настоящее изобретение относится к способу для создания функции стоимости (целевой функции) согласно родовому понятию пункта 1 формулы изобретения, к блоку управления согласно родовому понятию пункта 18 формулы изобретения и к моторному транспортному средству согласно родовому понятию пункта 19 формулы изобретения. Настоящее изобретение относится также к компьютерной программе и компьютерному программному продукту.
Уровень техники
В моторных транспортных средствах, например пассажирских автомобилях, грузовых автомобилях, автобусах или подобных, функции стоимости (целевые функции) часто применяются в различных алгоритмах оптимизации, чтобы определять различные параметры, которые используется для управления функциями транспортного средства. Такие алгоритмы оптимизации используются, например, в управлении системами автоматического поддержания скорости движения, управлении выбором передач и управлении переключением передач в автоматических системах переключения передач, и в регулировке реакции двигателя, в регулировке вентилятора двигателя или в регулировке выбросов, образующихся при сгорании. В этом описании изобретение иллюстрируется для использования в системе автоматического поддержания скорости движения, например, прогностической системе автоматического поддержания скорости движения (LACC), т.е. интеллектуальной системе автоматического поддержания скорости движения, которая использует знание об особенностях дороги впереди. Однако изобретение имеет отношение к общему созданию функции стоимости и поэтому не ограничено вариантом осуществления, который здесь приведен в качестве примера, в системе автоматического поддержания скорости движения. Изобретение может поэтому использоваться по меньшей мере там, где используются алгоритмы оптимизации, как выше.
Задача системы автоматического поддержания скорости движения состоит в том, чтобы достигать равномерной предварительно определенной скорости транспортного средства и чтобы ограничивать наивысшую скорость, которую моторное транспортное средство может иметь. Если транспортное средство превосходит наивысшую скорость, которую она ему разрешила, системе автоматического поддержания скорости движения разрешается тормозить транспортное средство. Важнейшая задача системы автоматического поддержания скорости движения состоит в том, чтобы удерживать потребление топлива настолько низким, насколько возможно, так как это является фактором, который очень сильно влияет на рентабельность для владельцев транспортного средства, например, компаний транспортировки или подобных.
Опытный водитель, ведущий транспортное средство без системы автоматического поддержания скорости движения, может уменьшать потребление топлива посредством приспособления его/ее вождения к характеристикам дороги впереди, так что можно избежать излишнего торможения и/или потребляющего топливо ускорения. Настоящие системы LACC пытаются имитировать приспособление вождения транспортного средства опытным водителем на основе знания о дороге впереди, так чтобы потребление топлива могло удерживаться на настолько низком уровне, насколько возможно.
Чтобы достигать наименьшего возможного потребления топлива, настоящие системы LACC поэтому пытаются выбирать оптимальный профиль скорости транспортного средства на основе их знания дороги впереди. Это знание может, например, основываться на информации, относящейся к топологии и кривизне дороги, к превалирующей дорожной ситуации или к состоянию участка дороги впереди. Такая информация является доступной, в частности, из карт, систем позиционирования, например GPS (глобальной системы позиционирования), и сообщений погоды.
На основе такой информации система автоматического поддержания скорости движения может вычислять оптимальный профиль скорости для транспортного средства, чтобы ему следовать. Эти вычисления оптимизации часто применяют функции стоимости, в этом случае оптимизация основана на минимизации одной или более таких функций стоимости. Другими словами, проблема оптимизации системы автоматического поддержания скорости движения может быть выражена как
min ƒ(x) (уравнение 1)
где
- ƒ(x) является функцией стоимости, и
- x∈X, где X представляет все допустимые состояния для переменной x.
Функция стоимости также может быть многомерной, т.е. она может зависеть от более чем одной переменной/аспекта, примерами таких аспектов являются время поездки и вес потребленного топлива. В ранее известных системах автоматического поддержания скорости движения, аспект времени поездки взвешивается в отношении к аспекту потребленного топлива. Функция стоимости затем определяется так, что эти аспекты являются взвешенными по отношению один к другому линейным образом посредством весовых коэффициентов:
ƒ=a1T+a2M (уравнение 2)
где
- f является функцией стоимости,
- T является временем поездки,
- M является весом потребленного топлива, и
- a1 и a2 являются весовыми коэффициентами.
Для них:
и
 (уравнение 3)
(уравнение 3)
где
- ν является скоростью транспортного средства,
- mf является потребленным топливом в расчете на единицу пройденного расстояния, и
- Stot является длиной участка дороги, охваченного оптимизацией.
Величина весовых коэффициентов относительно одного к другому управляет решением для проблемы оптимизации в уравнении 1 либо в направлении к более короткому времени поездки с высоким потреблением топлива, либо в направлении к более длительному времени поездки с низким потреблением топлива. В получении этого решения и, следовательно, требуемого управления системы автоматического поддержания скорости движения, выбор весовых коэффициентов является очень важным. Их величина является также очень важной в том, что это оказывает влияние на вычислительную сложность, когда уравнение 1 вычисляется.
Определение этих весовых коэффициентов для ранее известных систем автоматического поддержания скорости движения, так что требуемое решение для проблемы оптимизации достигается наряду с тем, что в то же время сложность численных вычислений удерживается на приемлемом уровне, ранее вело к значительной вычислительной работе.
Более того, к линейной функции стоимости согласно уравнению 2 очень трудно добавлять дополнительные аспекты, так как все весовые коэффициенты должны тогда вычисляться снова.
Линейная функция стоимости также приводит к тому, что процедура оптимизации, т.е. поиск минимума согласно уравнению 1, становится неэффективным. Это описывается более подробно ниже.
Краткое описание изобретения
Задачей настоящего изобретения является предложить решение вышеописанной проблемы.
Настоящее изобретение относится к вышеупомянутому способу для создания функции стоимости (целевой функции) согласно отличительной части пункта 1 формулы изобретения, к вышеупомянутому блоку управления согласно отличительной части пункта 18 формулы изобретения и к вышеупомянутому моторному транспортному средству согласно отличительной части пункта 19 формулы изобретения. Настоящее изобретение относится также к вышеупомянутой компьютерной программе и вышеупомянутому компьютерному программному продукту.
Проблемы, указанные выше, решаются посредством настоящего изобретения посредством того, что функцию стоимости, созданную согласно изобретению, очень легко расширять, чтобы она содержала, по существу, любое требуемое количество членов. Это достигается посредством функции стоимости, которая конфигурируется таким образом, что при введении зависимости от по меньшей мере одного дополнительного члена она поддерживает взаимное отношение между исходными по меньшей мере первым и вторым членами и также показывает взаимное отношение между упомянутым по меньшей мере одним дополнительным членом и исходными по меньшей мере первым и вторым членами.
Каждый из этих членов основан на аспекте, который является релевантным для проблемы оптимизации. Использование функции стоимости согласно изобретению поэтому допускает возможность ее приспособления к зависимости от подходящего количества аспектов. Это делает легким приспосабливать функцию стоимости к разным вариантам осуществления, которые зависят от разных аспектов и/или разных количеств аспектов.
Согласно одному варианту осуществления настоящего изобретения аспектные значения, которые формируют часть функции стоимости, стандартизируются. Эта стандартизация аспектных значений дает в результате масштабирование функции стоимости, что делает функцию стоимости подходящей для численных вычислений, так как значение функции может удерживаться на подходящей величине.
Стандартизация аспектных значений может делаться с помощью, например, опорных значений, полученных от стандартной системы автоматического поддержания скорости движения, например, с помощью опорного значения для аспекта времени поездки и опорного значения для аспекта веса потребленного топлива. Такая стандартизация означает, что функция стоимости согласно изобретению и ее оптимизация помещаются в прямое отношение с соответствующей функцией стоимости и оптимизацией для стандартной системы автоматического поддержания скорости движения. Таким образом, получается прямое сравнение между оптимизацией функции стоимости согласно изобретению и оптимизацией функции стоимости стандартной системы автоматического поддержания скорости движения.
Согласно одному варианту осуществления изобретения, соответственные по меньшей мере первый и второй члены каждый основаны на стандартизированном аспектном значении, при этом эта стандартизация обеспечивается использованием опорного значения для каждого аспекта. Если соответственные аспектные значения каждое принимают значение, которое является близким к этим опорным значениям, функция стоимости принимает значение функции, которое равняется, по существу, единице (1). Такое значение функции очевидно хорошо подходит для численных вычислений.
Если аспектное значение для упомянутого по меньшей мере одного дополнительного члена держится на значениях, которые этот аспект обычно принимает, т.е. значениях, близко соответствующих значениям для стандартной системы автоматического поддержания скорости движения, функция стоимости поддерживает, по существу, значение функции, которое она имела до введения упомянутой по меньшей мере одной дополнительной зависимости. При обычном вождении транспортного средства аспектное значение для упомянутого по меньшей мере одного дополнительного члена будет принимать значения, близкие к значениям для стандартной системы автоматического поддержания скорости движения. Значение функции может поэтому удерживаться на подходящей величине даже после введения зависимости от по меньшей мере одного дополнительного члена.
Согласно одному варианту осуществления настоящего изобретения аспектные значения, которые формируют часть функции стоимости, возводятся в квадрат. Это возведение в квадрат аспектных значений служит причиной того, что наклон функции стоимости является таким, что решение направлено к желательным точкам, тем самым упрощая численные вычисления и также делая вычисления эффективными.
Варианты осуществления для настоящего изобретения показываются в зависимых пунктах формулы изобретения и описываются более подробно ниже.
Краткий список чертежей
Изобретение объясняется более подробно ниже со ссылкой на прилагаемые чертежи, на которых аналогичные ссылочные позиции используются для аналогичных элементов, и на которых
Фиг. 1 - является графиком стандартизированной круговой функции стоимости,
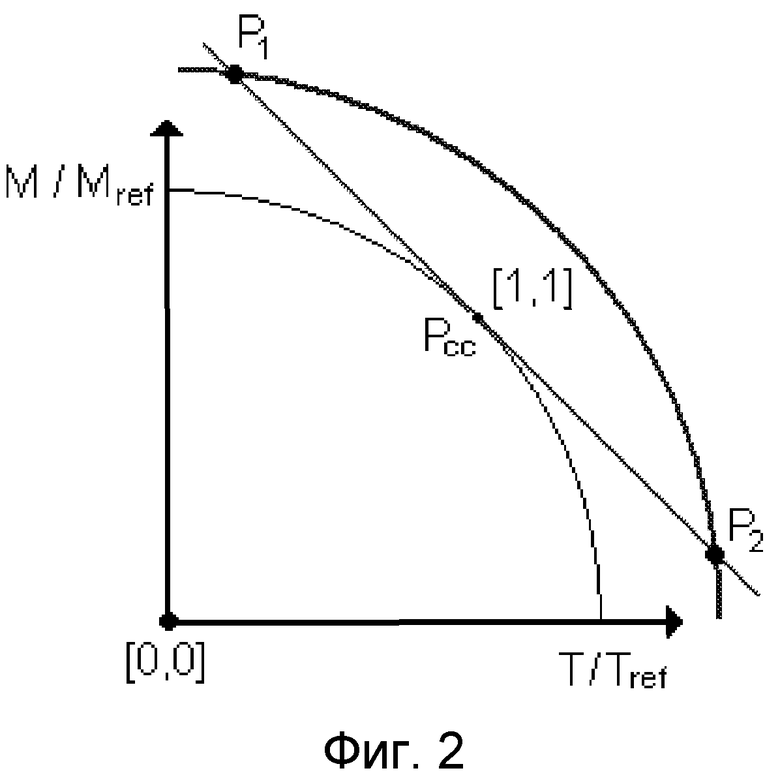
Фиг. 2 - является графиком стандартизированной круговой функции стоимости и традиционной линейной функции стоимости,
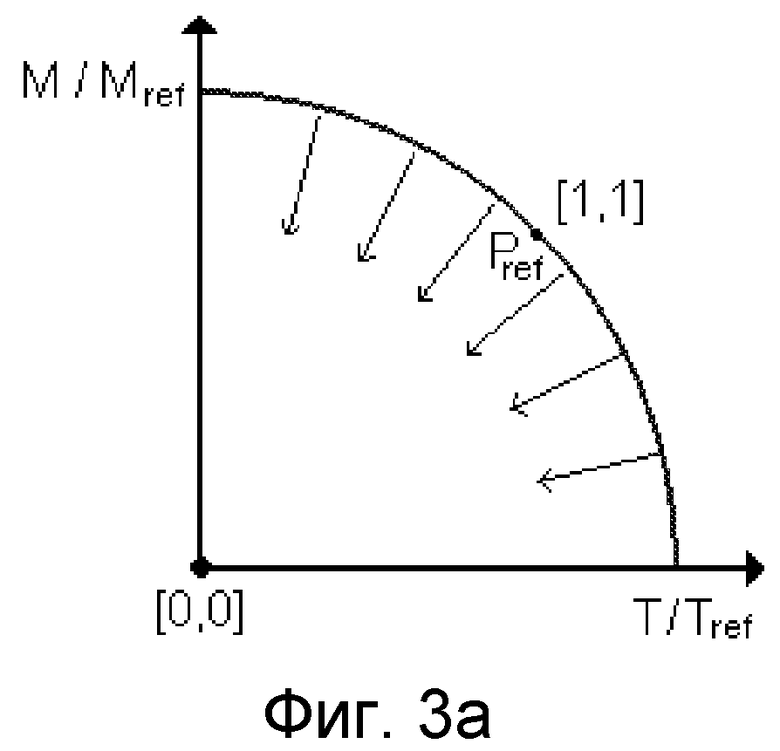
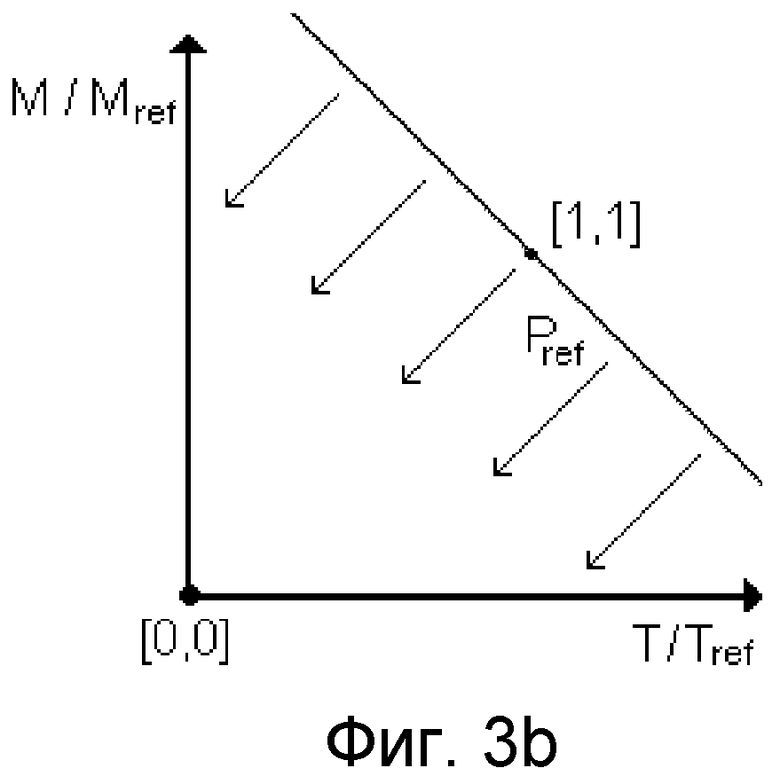
Фиг. 3 - является графиком стандартизированной круговой функции стоимости и традиционной линейной функции стоимости, и
Фиг. 4 схематически изображает блок управления.
Описание предпочтительных вариантов осуществления
Согласно настоящему изобретению, функция стоимости (целевая функции) создана так, что она зависит от по меньшей мере первого члена и второго члена, которые имеют взаимное отношение между ними. Функция стоимости также сконфигурирована таким образом, что она может расширяться, чтобы охватывать один или более дополнительных членов. Согласно изобретению, функция стоимости создана так, что, когда она расширяется, чтобы зависеть от первого члена, второго члена и по меньшей мере одного дополнительного члена, она все еще поддерживает то же взаимное отношение между первым членом и вторым членом. Функция стоимости также показывает взаимное отношение между упомянутым по меньшей мере одним дополнительным членом и первым и вторым членами.
Функция стоимости также определяется так, что, когда аспектное значение для упомянутого по меньшей мере одного дополнительного члена является близким по величине к его опорному значению, она имеет, по существу, одно и то же значение функции, когда она зависит только от первого члена и второго члена и когда она зависит от первого члена, второго члена и упомянутого по меньшей мере одного дополнительного члена.
Тот факт, что взаимные отношения между первым и вторым членами и между первым и вторым членами и упомянутым по меньшей мере одним дополнительным членом вместе с тем фактом, что значение функции поддерживается на приблизительно одном и том же значении, даже когда функция стоимости расширяется, чтобы зависеть от большего количества членов, делает легким расширение функции стоимости, чтобы она зависела от большего количества членов. Как описано более подробно ниже, каждый из этих членов основан на аспекте, который является релевантным для проблемы оптимизации. Наличие возможности расширять функцию стоимости является очень предпочтительным, так как управление некоторыми параметрами, например, в системе автоматического поддержания скорости движения или в автоматической системе переключения передач, фактически зависит от более чем двух аспектов. Более того, зависимости могут расти со временем, так что параметр может зависеть в течение некоторого периода времени от двух аспектов, но в течение другого периода времени зависеть от более чем двух аспектов. Чтобы иметь возможность оптимизировать управление транспортным средством, например, так, чтобы могло достигаться минимальное потребление топлива для разных транспортных средств, или для одного и того же транспортного средства в течение разных периодов времени, необходимо регулировать функцию стоимости так, чтобы она зависела от большего количества, или меньшего количества, аспектов. Это легко достигается с помощью настоящего изобретения.
Согласно одному варианту осуществления настоящего изобретения члены в функции стоимости, т.е. соответственный первый, второй и по меньшей мере один дополнительный член, каждый, основаны на одном аспекте, который относится к упомянутому транспортному средству. Соответственные первый и второй члены обычно связаны, в случае системы автоматического поддержания скорости движения, с временем поездки и весом потребленного топлива. Упомянутый по меньшей мере один дополнительный член, согласно одному варианту осуществления настоящего изобретения, может быть связанным с опытом вождения. Это описывается более подробно ниже. Как должен понимать специалист в данной области техники, для функции стоимости также могут использоваться другие аспекты, относящиеся к транспортному средству.
Согласно одному варианту осуществления настоящего изобретения члены в функции стоимости, т.е. соответствующий первый, второй и упомянутый по меньшей мере один дополнительный член, каждый, принимают вид стандартизированного аспектного значения. Аспектные значения, каждый, стандартизируются с помощью соответствующего опорного значения для каждого аспекта. Например, значение для аспекта времени поездки стандартизируется с помощью опорного значения для времени поездки, и значение для аспекта веса потребленного топлива стандартизируется с помощью опорного значения для веса потребленного топлива.
Стандартизация аспектных значений в функции стоимости означает, что масштабирование функции стоимости является подходящим для численных вычислений, так как значение функции может удерживаться на величине, соответствующей этой цели. Это делает возможным, если для стандартизации аспектных значений выбираются подходящие опорные значения, управлять масштабированием функции стоимости, т.е. величиной функции стоимости. Следовательно, является возможным посредством стандартизации выбирать величину функции стоимости, так что она имеет, для обычно встречающихся величин аспектных значений, значение, которое является подходящим для численных вычислений, и поэтому уменьшает вычислительную сложность системы. Подходящее такое значение является единицей (1). Другими словами, стандартизация функции стоимости так, что она имеет значение функции, близкое к единице, уменьшает вычислительную сложность. Специалист в данной области техники должен понимать, что разные процессоры или другие вычислительные устройства могут иметь разные наиболее предпочтительные значения функции, для которых они осуществляют их вычисления, и также, что стандартизация может адаптироваться так, чтобы получать такие подходящие значения функции, когда такие процессоры или другие вычислительные устройства используются для этих вычислений.
Согласно одному варианту осуществления настоящего изобретения в качестве опорных значений используются соответствующие значения от стандартной системы автоматического поддержания скорости движения. Таким образом, то, что используется в качестве опорного времени поездки, является временем поездки, которое бы достигалось стандартной системой автоматического поддержания скорости движения, и то, что используется в качестве опорного значения для веса потребленного топлива, является весом потребленного топлива, который бы достигался стандартной системой автоматического поддержания скорости движения и так далее для других аспектных значений.
Использование опорных значений от стандартной системы автоматического поддержания скорости движения обеспечивает гарантию использования опорных значений подходящих величин, так как может предполагаться, что аспектные значения для системы автоматического поддержания скорости движения, которые применяет настоящее изобретение, будут относительно близки к значениям для стандартной системы автоматического поддержания скорости движения. Это означает, что масштабирование функции стоимости побуждает ее принимать значения, которые являются близкими к единице. Это дает в результате, как описано выше, вычислительные преимущества.
Стандартизация с помощью соответствующих значений для стандартной системы автоматического поддержания скорости движения также предоставляет дополнительное преимущество в том, что производительность для системы автоматического поддержания скорости движения согласно изобретению может быть напрямую связана со стандартной системой автоматического поддержания скорости движения. Это иллюстрируется и описывается более подробно ниже.
Согласно одному варианту осуществления настоящего изобретения члены в функции стоимости принимают вид возведенных в квадрат стандартизированных аспектных значений. Аспектные значения, таким образом, в этом случае будут сначала стандартизироваться с помощью подходящего опорного значения, например, соответствующего значения для стандартной системы автоматического поддержания скорости движения, и будут после этого возводиться в квадрат.
Функция стоимости, содержащая два таких возведенных в квадрат стандартизированных аспектных значения, может рассматриваться как круговое представление функции стоимости, которое отличается от традиционного линейного представления, такого как выражено, например, в уравнении 2 выше. Согласно круговому представлению функции стоимости стоимость рассматривается как радиус круга с его центром в начале координат. Это иллюстрируется на фиг. 1, на которой ось x обозначает стандартизированное и возведенное в квадрат время поездки и ось y стандартизированный и возведенный в квадрат вес потребленного топлива. Функция стоимости, описанная здесь, определяется как

где
- T является временем поездки,
- Tref является опорным временем поездки,
- M является весом потребленного топлива, и
- Mref является опорным значением для веса потребленного топлива.
В этом круговом представлении функции стоимости начало координат [0,0] является оптимальным решением, но не является практически возможным решением, так как время поездки и вес потребленного топлива тогда оба были бы нулевыми. Другие решения в плоскости  , которые находятся на одном и том же расстоянии от начала координат, имеют равное значение. Другими словами, решения вдоль заданной дуги являются равным образом хорошими решениями, тогда как решения, которые находятся дальше от начала координат, чем эта дуга, являются плохими решениями. Это иллюстрируется на фиг. 1, которая показывает, что, если для стандартизации используются, например, опорные значения для стандартной системы автоматического поддержания скорости движения, как описано выше, дуга, на которой располагается точка Pref, представляет решения, которые являются в точности такими же хорошими, как решения для стандартной системы автоматического поддержания скорости движения, так как
, которые находятся на одном и том же расстоянии от начала координат, имеют равное значение. Другими словами, решения вдоль заданной дуги являются равным образом хорошими решениями, тогда как решения, которые находятся дальше от начала координат, чем эта дуга, являются плохими решениями. Это иллюстрируется на фиг. 1, которая показывает, что, если для стандартизации используются, например, опорные значения для стандартной системы автоматического поддержания скорости движения, как описано выше, дуга, на которой располагается точка Pref, представляет решения, которые являются в точности такими же хорошими, как решения для стандартной системы автоматического поддержания скорости движения, так как  для этих решений. Точка P1, которая представляет решение для системы автоматического поддержания скорости движения согласно настоящему изобретению, является более близкой к началу координат, чем Pref, что дает в результате более оптимизированное решение, чем то, что представлено посредством Pref. P2 находится дальше от начала координат, чем Pref, что показывает, что P2 представляет более плохое решение, чем посредством стандартной системы автоматического поддержания скорости движения.
для этих решений. Точка P1, которая представляет решение для системы автоматического поддержания скорости движения согласно настоящему изобретению, является более близкой к началу координат, чем Pref, что дает в результате более оптимизированное решение, чем то, что представлено посредством Pref. P2 находится дальше от начала координат, чем Pref, что показывает, что P2 представляет более плохое решение, чем посредством стандартной системы автоматического поддержания скорости движения.
Как ясно показано посредством иллюстрации из фиг. 1, квадратичные и стандартизированные члены в функции стоимости дают в результате очень легко понимаемое сравнение между системой автоматического поддержания скорости движения согласно изобретению и стандартной системой автоматического поддержания скорости движения, так как все решения, которые являются более хорошими, чем стандартная система автоматического поддержания скорости движения, дают в результате значения функции, которые находятся в пределах дуги, сформированной посредством всех точек со значением функции единица для функции стоимости.
Является также возможным переписать уравнение 4 без использования квадратных корней, без потери преимуществ использования возведенных в квадрат аспектных значений. Это иллюстрируется для других уравнений ниже.
Фиг. 2 дополнительно иллюстрирует различия между линейным представлением и круговым представлением функции стоимости. Традиционно используемое линейное представление функции стоимости представлено на фиг. 2 посредством прямой линии между точками P1, Pcc и P2, где Pcc соответствует Pref из фиг. 1 выше. Согласно этому традиционно используемому представлению соответствующие решения, соответствующие P1, Pcc и P2, являются равным образом действительными, так как они находятся на одной и той же прямолинейной линии. Рассмотрение фиг. 2 более подробно, однако показывает ясно, что решения в P1 и P2 находятся далеко от решения для стандартной системы автоматического поддержания скорости движения, т.е. они находятся далеко от решений на дуге со значением функции единица. Решения в P1 и P2 на практике являются нежелательными в том, что их профили скорости находятся слишком далеко от профиля скорости для стандартной системы автоматического поддержания скорости движения. Другими словами, соответствующие профили скорости, соответствующие P1 и P2, находятся далеко от установленной скорости, которая выбирается водителем, чтобы служить в качестве входного сигнала для системы автоматического поддержания скорости движения.
В противоположность круговое представление ясно показывает, что решения в точках P1 и P2 не являются желательными, так как они располагаются вне дуги и находятся поэтому дальше от начала координат, чем точки решения для стандартной системы автоматического поддержания скорости движения. Другими словами, круговое представление показывает, что P1 и P2 находятся на другой дуге, нежели Pcc, которая располагается более близко к началу координат. Таким образом, соответствующие стандартизированные возведенные в квадрат функции стоимости для точек P1 и P2 принимают более высокое значение, чем значение для стандартизированной возведенной в квадрат функции стоимости для точки Pcc.
Фиг. 3a-b иллюстрируют схематически различия между наклонами традиционно используемого линейного представления для функции стоимости и круговым образом представленной функции стоимости согласно изобретению. Наклоны линейно представленной функции стоимости идут вниз влево, согласно стрелкам на фиг. 3b. В случае круговым образом представленной функции стоимости согласно настоящему изобретению, изображенной на фиг. 3a, все наклоны идут вместо этого напрямую в направлении к началу координат, давая в результате решения, расположенные в желательных точках, с соизмеримыми увеличениями по времени и по топливу. Направление наклонов управляет решением в направлении к диагонали, которая проходит через начало координат с углом 45° к горизонтальной оси. Это происходит из-за того, что точки, расположенные далеко от диагонали, рассматриваются как менее желательные, когда используется круговым образом представленная функция стоимости. Оптимизация круговой функции стоимости поэтому обеспечивает поиск решения в направлении к этим желательным точкам вдоль диагонали, таким образом, оптимизация будет направлена к этой диагонали. Решение, близкое к этой диагонали, является желательным в том, что оно ощущается как хорошее и естественное для водителя транспортного средства, так как решения, близкие к диагонали, дают в результате профили скорости, сходные с профилями стандартных систем автоматического поддержания скорости движения.
В случае традиционно используемого линейного представления только некоторые наклоны идут в направлении к желательным точкам вдоль диагонали, как проиллюстрировано на фиг. 3b, тогда как большая часть идут в направлении к неоптимальным точкам в сторону от диагонали. Более быстрое решение для проблемы оптимизации, таким образом, получается посредством использования функции стоимости согласно настоящему изобретению, чем посредством использования линейно представленной функции стоимости, так как точки, которые находятся далеко от диагонали, оцениваются хуже посредством круговым образом представленной функции стоимости, чем посредством линейно представленной функции стоимости. Это также иллюстрируется на фиг. 2, на которой точки P1 и P2 являются такими же желательными, как диагональная точка Pcc согласно линейно представленной функции стоимости, тогда как они являются менее желательными, чем Pcc согласно круговым образом представленной функции стоимости согласно изобретению.
Посредством весовых коэффициентов является возможным показывать отношение между составляющими членами функции стоимости, так что различным членам даются разные веса в функции стоимости, т.е. они оцениваются различным образом. Функция стоимости может тогда рассматриваться как эллиптическое представление, так как различным весовым коэффициентам даются взаимно разные значения, что дает в результате разные протяженности вдоль оси x и оси y в плоскости  .
.
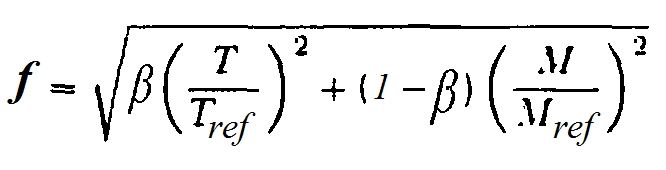
Согласно одному варианту осуществления настоящего изобретения взаимное отношение между членами в функции стоимости принимает вид выпуклых комбинаций. Весовые коэффициенты в функции стоимости поэтому здесь принимают вид выпуклых комбинаций. Когда выпуклые комбинации используются для весовых коэффициентов, результирующие значения находятся между нулем и единицей, и суммарное значение весовых коэффициентов остается единицей. Примером такой функции стоимости является
 (уравнение 5)
(уравнение 5)
где
- T является временем поездки,
- Tref является опорным временем поездки,
- M является весом потребленного топлива,
- Mref является опорным значением для веса потребленного топлива, и
- β является весовым коэффициентом, где β
Как показано выше, функция стоимости согласно уравнению 5 также может быть записана в форме, в которой квадратный корень не используется, как, например,
 (уравнение 6)
(уравнение 6)
где
- T является временем поездки,
- Tref является опорным временем поездки,
- M является весом потребленного топлива,
- Mref является опорным значением для веса потребленного топлива, и
- β является весовым коэффициентом, где β
Использование выпуклых комбинаций в качестве весовых коэффициентов обеспечивает гарантию того, что функция стоимости будет иметь значение функции, близкое к единице, если применяется стандартизация и если аспектные значения принимают значения, относительно близкие к их соответствующим опорным значениям, как выше. Эта величина значения функции облегчает численные вычисления, связанные с функцией стоимости, и поэтому генерирует меньшую вычислительную сложность. Использование выпуклых комбинаций в качестве весовых коэффициентов, чтобы показывать отношение между членами в функции стоимости, поэтому означает, что взаимные отношения между коэффициентами на значение функции для функции стоимости не влияют, так как их суммарное значение сводится к единице.
Согласно традиционно используемым функциям стоимости, таким как те, что показаны в уравнении 2, весовые коэффициенты a1 и a2 могут принимать любые требуемые значения, часто ведя к значениям функции значительно более большим чем единица и, следовательно, также к увеличенной вычислительной сложности.
Уравнения 5 и 6 используют не только выпуклые комбинации для отношения между членами, но также стандартизацию аспектных значений. Как описано выше, эта стандартизация также означает, что значение функции для функции стоимости удерживается около единицы в случае обычно возникающих аспектных значений. Комбинация стандартизации и использования выпуклых комбинаций дает в результате согласно настоящему изобретению функцию стоимости, принимающую значение функции, которое является очень хорошо подходящим для дальнейших численных вычислений.
Также возможно согласно одному варианту осуществления изобретения расширять функцию стоимости, чтобы она зависела от по меньшей мере одного дополнительного аспекта в дополнение к аспектам времени поездки и веса потребленного топлива. Примером такого дополнительного аспекта является опыт вождения. Тот факт, что функция стоимости согласно изобретению создается так, что новые члены могут добавляться в ее без изменения отношения между членами, уже содержащимися ней, делает легким добавление дополнительных членов. Если функция стоимости, таким образом, делается зависящей от трех членов, результат является сферическим представлением функции стоимости. Аналогичным образом как для двух исходных членов, различные члены могут взвешиваться по отношению один к другому.
Другими словами, функция стоимости конфигурируется таким образом, что взаимное отношение между упомянутыми по меньшей мере двумя исходными составляющими членами функции стоимости, в этом примере они относятся к времени поездки и весу потребленного топлива, поддерживается, когда к ней добавляются дополнительные члены. В то же время для упомянутого по меньшей мере одного дополнительного члена задается отношение в отношении упомянутых по меньшей мере двух исходных членов.
Согласно одному варианту осуществления настоящего изобретения взаимное отношение между упомянутыми по меньшей мере двумя исходными составляющими членами и отношение между упомянутым по меньшей мере одним дополнительным членом и упомянутыми по меньшей мере двумя исходными членами принимают вид выпуклых комбинаций. Члены также принимают вид стандартизированных и возведенных в квадрат аспектных значений. Это делает возможным и легким добавление новых членов к функции стоимости, так как значение функции для функции стоимости во время их дополнения, по существу, поддерживает свое значение функции для аспектных значений, близких к соответствующему опорному значению, т.е. функция стоимости, по существу, поддерживает значение, близкое к единице.
Функция стоимости, которая зависит от времени поездки, веса потребленного топлива и опыта вождения, может, согласно одному варианту осуществления настоящего изобретения, определяться как
 (уравнение 7)
(уравнение 7)
где
- T является временем поездки,
- Tref является опорным временем поездки,
- M является весом потребленного топлива,
- Mref является опорным значением для веса потребленного топлива,
- κ является значением для опыта вождения,
- κref является опорным значением для опыта вождения,
- β является весовым коэффициентом, где β
- γ является весовым коэффициентом, где γ
Как показано выше, уравнение 7 также может записываться в форме, в которой используется квадратный корень из заданного выражения.
Специалист в данной области техники должен понимать, что аспект опыта вождения может определяться и устанавливаться различными способами. Один способ определения значения для аспекта опыта вождения согласно одному варианту осуществления изобретения состоит в том, чтобы определять его как зависящий от двух членов, соответственно, на основе изменения ускорения для транспортного средства и восприятия скорости для водителя.
Изменение ускорения ("рывки") может использоваться как мера опыта вождения, так как это скорее всего ощущается как неблагоприятное воздействие на комфорт вождения. Таким образом, рывки могут определяться как
 (уравнение 8)
(уравнение 8)
где
-  является изменением ускорения.
является изменением ускорения.
Мера степени, до которой рывки затрагивают комфорт, также может представляться как
 (уравнение 9)
(уравнение 9)
где суммируются рывки в N точках. Абсолютная величина означает, что рывки в обоих положительных и отрицательных направлениях суммируются, давая в результате все типы рывков, которые рассматриваются как влияющие на комфорт.
Восприятие скорости может определяться как
 (уравнение 10)
(уравнение 10)
где
- vref является опорной скоростью, и
- vk является мгновенной скоростью транспортного средства.
Здесь предполагается, что скорость неблагоприятно влияет на восприятие скорости, когда находится ниже опорной скорости, что может быть, например, в случае наличия ограничения допустимой скорости на участке дороги.
Если необходимо принимать в рассмотрение недовольство в случае, когда скорость выше опорной скорости, взамен может использоваться следующее выражение для восприятия скорости:
 (уравнение 11)
(уравнение 11)
где
- vref является опорной скоростью, и
- vk является мгновенной скоростью транспортного средства.
С использованием определения опыта вождения, как выше, может представляться следующее выражение для восприятия скорости:
 (уравнение 12)
(уравнение 12)
где
- κ является значением для опыта вождения,
- κref является опорным значением для опыта вождения,
- J является значением для изменения ускорения,
- Jref является опорным значением для изменения ускорения,
- Y является значением для восприятия скорости,
- Yref является опорным значением для восприятия скорости, и
- ψ является весовым коэффициентом, где ψ
Уравнение 7 и уравнение 12 также могут записываться вместе как полное выражение для функции стоимости, когда она зависит от времени поездки, веса потребленного топлива и опыта вождения. Такое выражение может записываться как
 (уравнение 13)
(уравнение 13)
где γ,β,ψ∈[0,1] и элементы в векторе, содержащем весовые коэффициенты, т.е. элементы в векторе
суммируются к значению единица, так как они принимают вид выпуклых комбинаций. Как результат стандартизации, возведения в квадрат и использования выпуклых комбинаций в качестве весовых коэффициентов, эта расширенная функция стоимости согласно настоящему изобретению все еще имеет значение функции, которое является, по существу, неизменным после расширения, если дополнительное аспектное значение находится относительно близко к его опорному значению. Значение функции будет, таким образом, также, по существу, единицей для расширенной функции, если все аспектные значения в функции стоимости находятся относительно близко к их соответствующим опорным значениям.
Настоящее изобретение проиллюстрировано выше для варианта осуществления в системе автоматического поддержания скорости движения, но, как должен понимать специалист в данной области техники, функция стоимости согласно изобретению может применяться во многих контекстах в моторном транспортном средстве. Функция стоимости согласно настоящему изобретению может использоваться для, по существу, всех типов регулирования, которые включают в себя некоторое количество разных аспектов, которые взвешиваются вместе в функции стоимости. Такие аспекты могут, возможно, даже быть взаимно противоречивыми. Некоторые неограничивающие примеры использования функции стоимости находятся в оптимизации параметра, который относится к управлению интеллектуальной системой автоматического поддержания скорости движения, автоматической коробкой передач, регулировкой реакции двигателя, регулировкой вентилятора двигателя, регулировкой выбросов, образующихся при сгорании.
Как должен понимать специалист в данной области техники, эти различные оптимизации и регулировки требуют разных входных сигналов и основаны на разных аспектах. Специалисты должны поэтому принимать во внимание, что аспекты, проиллюстрированные выше, такие как время поездки, вес потребленного топлива и опыт вождения, могут в вариантах осуществления, других, нежели для системы автоматического поддержания скорости движения, заменяться в членах функции стоимости другими подходящими аспектами. Другими словами, функция стоимости согласно настоящему изобретению не ограничивается вариантом осуществления в системах автоматического поддержания скорости движения, или зависимостью от аспектов, проиллюстрированных выше.
Как показано выше, все выражения для функций стоимости могут выражаться с или без использования обозначений, содержащих квадратный корень.
Специалисты должны понимать, что способ для создания функции стоимости согласно настоящему изобретению также может осуществляться в компьютерной программе, которая, когда исполняется на компьютере, побуждает компьютер применять упомянутый способ. Компьютерная программа содержится на машиночитаемом носителе компьютерного программного продукта, который принимает вид подходящей памяти, например, ROM (постоянное запоминающее устройство), PROM (программируемое постоянное запоминающее устройство), EPROM (стираемое PROM), флэш-память, EEPROM (электрически стираемое PROM), устройство жесткого диска и т.д.
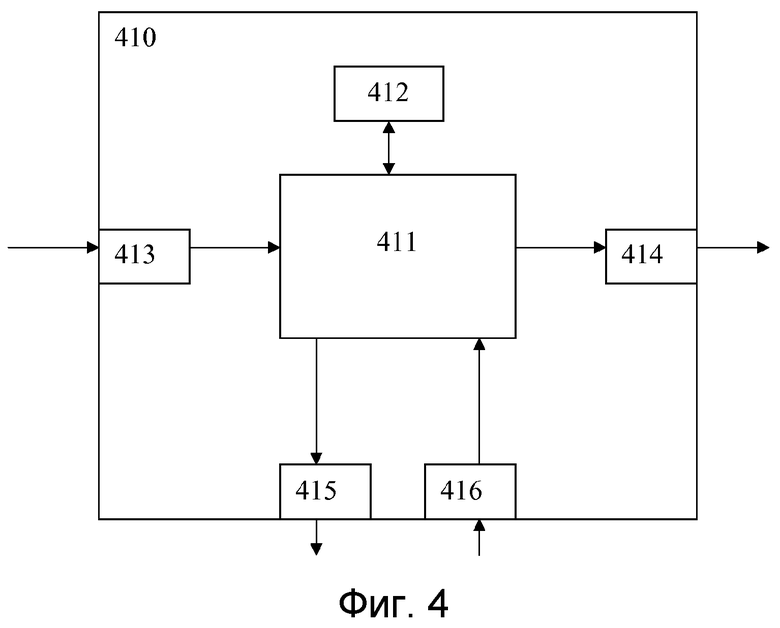
Фиг. 4 схематически изображает блок 410 управления. Блок 410 управления содержит блок 411 вычисления, который может принимать вид, по существу, любого подходящего типа процессора или микрокомпьютера, например, схемы для цифровой обработки сигналов (цифрового сигнального процессора, DSP), или схемы с предварительно определенной специальной функцией (специализированной интегральной схемы, ASIC). Блок 411 вычисления соединен с запоминающим устройством 412, которое содержится в блоке 410 управления и которое обеспечивает блок 411 вычисления, например, сохраненным программным кодом и/или сохраненными данными, которые необходимы блоку 411 вычисления, чтобы он мог выполнять вычисления. Блок 411 вычисления также адаптирован, чтобы хранить частичные или конечные результаты вычислений в запоминающем устройстве 412.
Блок 410 управления дополнительно обеспечивается соответствующими устройствами 413, 414, 415, 416 для приема входных сигналов и отправки выходных сигналов. Эти входные и выходные сигналы могут содержать волновые формы, импульсы или другие признаки, которые устройства 413, 416 приема сигналов могут обнаруживать как информацию и которые могут преобразовываться в сигналы, которые могут обрабатываться блоком 411 вычисления. Блок 411 вычисления затем обеспечивается этими сигналами. Устройства 414, 415 отправки сигналов адаптированы для преобразования сигналов, принятых от блока 411 вычисления, чтобы, например, посредством модулирования их, создавать выходные сигналы, которые могут передаваться в другие части системы. Входные сигналы в систему обеспечиваются стандартными способами, например, посредством датчиков, посредством использования моделей или некоторым другим аналогичным способом, известным специалистам.
Каждое из соединений с соответствующими устройствами для приема входных сигналов и отправки выходных сигналов может принимать вид одного или более из кабеля, шины данных, например, шины CAN (локальной сети контроллеров), шины MOST (механизма транспортировки для систем, ориентированных на мультимедиа) или некоторой другой шинной конфигурации, или беспроводного соединения. Специалист в данной области техники должен понимать, что вышеупомянутый компьютер может принимать вид блока 411 вычисления, и что вышеупомянутая память может принимать вид запоминающего устройства 412.
Блок управления согласно изобретению адаптирован для создания функции стоимости для использования в моторном транспортном средстве, при этом эта функция стоимости зависит от по меньшей мере первого и второго члена, показывает взаимное отношение между этими по меньшей мере первым и вторым членами и принимает значение функции. Блок управления дополнительно адаптируется для конфигурирования функции стоимости, так что в функцию стоимости может легко вводиться зависимость от по меньшей мере одного дополнительного члена. При таком введении функция стоимости поддерживает взаимное отношение между упомянутыми по меньшей мере первым и вторым членами и также показывает взаимное отношение между упомянутым по меньшей мере одним дополнительным членом и этими по меньшей мере первым и вторым членами.
Согласно одному варианту осуществления блока управления функция стоимости поддерживает, по существу, одно и то же значение функции даже после введения одного или более дополнительных членов, если аспектное значение для этого по меньшей мере одного дополнительного члена находится относительно близко к опорному значению, с помощью которого она стандартизирована.
Специалисты должны также принимать во внимание, что вышеописанный блок управления может адаптироваться для осуществления различных вариантов осуществления способа согласно изобретению. Изобретение относится также к моторному транспортному средству, например грузовому автомобилю или автобусу, содержащему по меньшей мере один такой блок управления для создания функции стоимости согласно изобретению.
Настоящее изобретение не является ограниченным описанными выше вариантами осуществления изобретения, но относится к и содержит все варианты осуществления, которые попадают в пределы объема защиты прилагаемых независимых пунктов формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И МОДУЛЬ ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2534114C2 |
| ВЗАИМОДЕЙСТВИЕ С ВОДИТЕЛЕМ, ОТНОСЯЩЕЕСЯ К ЭКОНОМИЧНОМУ АВТОМАТИЧЕСКОМУ ПОДДЕРЖАНИЮ СКОРОСТИ | 2012 |
|
RU2594059C2 |
| МОДУЛЬ И СПОСОБ, ОТНОСЯЩИЕСЯ К ВЫБОРУ РЕЖИМА ПРИ ОПРЕДЕЛЕНИИ ЗНАЧЕНИЙ КОНТРОЛЬНОЙ ТОЧКИ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2556829C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2568151C2 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО ДЛЯ ПЛАНИРОВАНИЯ ЗАВИСЯЩЕГО ОТ ВРЕМЕНИ МАРШРУТА | 2006 |
|
RU2407060C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАСХОДА ЭНЕРГИИ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2012 |
|
RU2608196C2 |
| ОЦЕНКА СТИЛЯ ВОЖДЕНИЯ АВТОМОБИЛЕЙ, ОРИЕНТИРОВАННОГО НА ЭКОНОМИЮ ТОПЛИВА | 2012 |
|
RU2616487C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ, СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ И ЭНЕРГОНЕЗАВИСИМЫЙ НОСИТЕЛЬ ДАННЫХ | 2020 |
|
RU2749742C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПТИМИЗАЦИИ ЭНЕРГОПОТРЕБЛЕНИЯ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2014 |
|
RU2640919C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2561478C1 |
Изобретение относится к системам круиз контроля транспортных средств. Функция стоимости представляет собой круговое представление функции стоимости. Стоимость рассматривается как радиус круга с его центром в начале координат. Ось х обозначает стандартизованное и возведенное в квадрат время поездки, ось у стандартизованный и возведенный в квадрат вес потребленного топлива. Функция стоимости определяется как
где
- T является временем поездки,
- Tref является опорным временем поездки,
- M является весом потребленного топлива, и
- Mref является опорным значением для веса потребленного топлива. Достигается удержание потребления топлива на низком уровне. 3 н. и 13 з.п. ф-лы, 4 ил.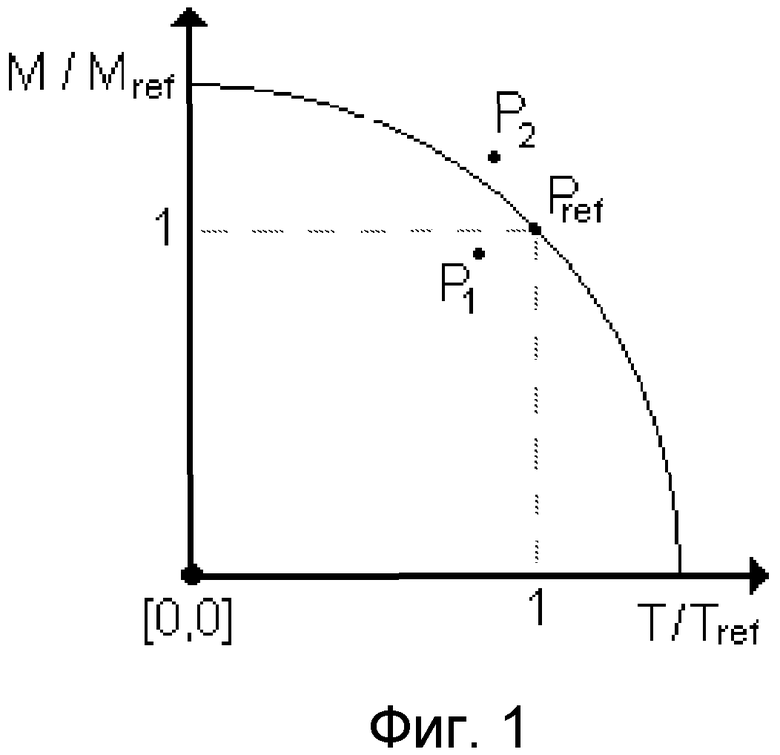
1. Способ для оптимизации параметра в моторном транспортном средстве, причем упомянутая оптимизация основана на функции стоимости, при этом упомянутая функция стоимости зависит от по меньшей мере первого и второго члена, показывает взаимное отношение между упомянутыми по меньшей мере первым и вторым членами и принимает значение функции, отличающийся тем, что:
- упомянутую функцию стоимости конфигурируют так, что в упомянутую функцию стоимости может вводиться зависимость от по меньшей мере одного дополнительного члена посредством конфигурирования упомянутых по меньшей мере первого и второго членов и упомянутого по меньшей мере одного дополнительного члена, чтобы каждый был основан на соответственном аспекте, относящемся к упомянутому моторному транспортному средству, и чтобы каждый принимал вид соответственного возведенного в квадрат стандартизированного аспектного значения, при этом стандартизацию осуществляют посредством опорного значения для каждого аспекта; при этом
- упомянутая функция стоимости после этого поддерживает упомянутое взаимное отношение между упомянутыми по меньшей мере первым и вторым членами и показывает взаимное отношение между упомянутым по меньшей мере одним дополнительным членом и упомянутыми по меньшей мере первым и вторым членами.
2. Способ по п.1, в котором упомянутое опорное значение принимает вид соответствующего значения, полученного посредством стандартной системы автоматического поддержания скорости движения.
3. Способ по любому из пп.1-2, в котором упомянутые взаимные отношения между упомянутыми по меньшей мере первым и вторым членами принимают вид выпуклых комбинаций.
4. Способ по любому из пп.1-2, в котором упомянутые взаимные отношения между упомянутым по меньшей мере одним дополнительным членом и упомянутыми первым и вторым членами принимают вид выпуклых комбинаций.
5. Способ по п.4, в котором упомянутая функция стоимости при упомянутом введении, по существу, поддерживает упомянутое значение функции, если упомянутый по меньшей мере один дополнительный член основан на стандартизированном аспектном значении, стандартизацию которого осуществляют посредством опорного значения для каждого аспекта, и упомянутое аспектное значение принимает значение, которое является близким к упомянутому опорному значению.
6. Способ по любому из пп.1-2 или 5, в котором упомянутая функция стоимости зависит от двух членов, основанных, соответственно, на времени поездки и весе потребленного топлива.
7. Способ по п.6, в котором упомянутую функцию стоимости определяют согласно
где
- T является временем поездки,
- Tref является опорным временем поездки,
- M является весом потребленного топлива,
- Mref является опорным значением для веса потребленного топлива, и
- β является весовым коэффициентом, где β [0,1].
[0,1].
8. Способ по любому из пп.1-2 или 5, в котором упомянутая функция стоимости зависит от трех членов, основанных, соответственно, на времени поездки, весе потребленного топлива и опыте вождения.
9. Способ по п.8, в котором упомянутая функция стоимости определяется согласно

где
- T является временем поездки,
- Tref является опорным временем поездки,
- M является весом потребленного топлива,
- Mref является опорным значением для веса потребленного топлива,
- κ является значением для упомянутого опыта вождения,
- κref является опорным значением для упомянутого опыта вождения,
- β является весовым коэффициентом, где β[0,1], и
- γ является весовым коэффициентом, где γ[0,1].
10. Способ по п.8, в котором член для опыта вождения зависит от двух членов, основанных, соответственно, на изменении ускорения и восприятии скорости.
11. Способ по п.9, в котором член для опыта вождения зависит от двух членов, основанных, соответственно, на изменении ускорения и восприятии скорости.
12. Способ по п.10, в котором член для опыта вождения определяется согласно

где
- κ является значением для упомянутого опыта вождения,
- κref является опорным значением для упомянутого опыта вождения,
- J является значением для изменения ускорения,
- Jref является опорным значением для изменения ускорения,
- Y является значением для восприятия скорости,
- Yref является опорным значением для восприятия скорости, и
- ψ является весовым коэффициентом, где ψ[0,1].
13. Способ по любому из пп.1-2 или 5, в котором упомянутое значение функции является, по существу, единицей, если упомянутые по меньшей мере первый и второй члены, каждый, основаны на соответственном стандартизированном аспектном значении, стандартизацию которого осуществляют посредством опорного значения для каждого аспекта, и соответственные аспектные значения, каждое, принимают значение, которое является близким к упомянутому опорному значению.
14. Способ по любому из пп.1-2 или 5, в котором упомянутый параметр, который оптимизируют, относится к управлению любым из следующего:
- интеллектуальной системой автоматического поддержания скорости движения,
- автоматической коробкой передач,
- регулировкой реакции двигателя,
- регулировкой вентилятора двигателя, и
- регулировкой выбросов, образующихся при сгорании.
15. Блок управления, адаптированный для оптимизации параметра в моторном транспортном средстве, при этом упомянутая оптимизация основана на функции стоимости, при этом упомянутая функция стоимости зависит от по меньшей мере первого и второго члена, показывает взаимное отношение между упомянутыми по меньшей мере первым и вторым членами и принимает значение функции, отличающийся тем, что
- упомянутый блок управления адаптирован для конфигурирования упомянутой функции стоимости так, что в упомянутую функцию стоимости может быть введена зависимость от по меньшей мере одного дополнительного члена посредством конфигурирования упомянутых по меньшей мере первого и второго членов и упомянутого по меньшей мере одного дополнительного члена, чтобы каждый был основан на соответственном аспекте, относящемся к упомянутому моторному транспортному средству, и чтобы каждый принимал вид соответственного возведенного в квадрат стандартизированного аспектного значения, при этом блок управления адаптирован для осуществления стандартизации посредством опорного значения для каждого аспекта; при этом
- упомянутая функция стоимости после этого поддерживает упомянутое взаимное отношение между упомянутыми по меньшей мере первым и вторым членами и показывает взаимное отношение между упомянутым по меньшей мере одним дополнительным членом и упомянутыми по меньшей мере первым и вторым членами.
16. Моторное транспортное средство, отличающееся тем, что упомянутое транспортное средство содержит блок управления по п.15.
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

