ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу и системе эксплуатации транспортного средства. В частности, изобретение относится к способу и системе эксплуатации транспортного средства для движения упомянутого транспортного средства вперед в ситуациях, где преобладает требование пониженной мощности при движении транспортного средства вперед. Изобретение также относится к компьютерной программе и компьютерному программному продукту, который реализует способ согласно настоящему изобретению.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Устройства автоматического поддержания скорости движения сейчас являются обычными средствами в моторизированных транспортных средствах, например легковых автомобилях, грузовиках и автобусах. Цель устройства автоматического поддержания скорости движения заключается в достижении постоянной предварительно определенной скорости транспортного средства, и устройство автоматического поддержания скорости движения может быть традиционного типа, предназначенного для поддержания постоянной скорости транспортного средства.
Это может быть достигнуто в результате адаптации крутящего момента двигателя для того, чтобы избежать замедления, например в результате увеличения крутящего момента на подъеме. Общая цель для устройства автоматического поддержания скорости движения заключается в достижении подходящей эксплуатации транспортного средства и также большего удобства для его водителя.
Водитель транспортного средства, оснащенного устройством автоматического поддержания скорости движения, обычно устанавливает скорость Vcc в качестве скорости, которую он/она желает, чтобы транспортное средство поддерживало до тех пор, пока функция устройства автоматического поддержания скорости движения по какой-либо причине не будет отключена. Устройство автоматического поддержания скорости движения затем определяет опорную скорость vref, которую оно запрашивает от части системы управления транспортным средством, которая управляет двигателем транспортного средства, например блока управления двигателем.
Если функция устройства автоматического поддержания скорости движения, как указывалось выше, традиционного типа Vref, будет равной заданной скорости Vcc, то транспортное средство будет постоянно стремиться поддерживать заданную водителем скорость Vcc. Таким образом, работа устройства автоматического поддержания скорости движения этого вида побуждает транспортное средство обеспечивать поддержание скорости, установленной независимо от того, движется оно на подъеме, спуске или по горизонтальной поверхности дорожного покрытия. Это означает, что транспортное средство может ускоряться при переезде через вершину холма, только чтобы немедленно притормозить на последующем нисходящем уклоне, чтобы избежать превышения заданной скорости. Таким образом, этот способ является неэкономичным способом эксплуатации транспортного средства, особенно в случае с тяжелыми транспортными средствами.
Обычно случается так, что, не считая стоимости покупки транспортного средства, основные статьи расходов на его текущую эксплуатацию включают в себя зарплату водителя, ремонт и техническое обслуживание и на топливо для приведения транспортного средства в действие, и стоимость топлива может очень сильно повлиять на рентабельность для владельца транспортного средства, например, транспортного предприятия или тому подобного.
По этой причине, имеются функции устройства автоматического поддержания скорости движения, которые стремятся корректировать эксплуатацию транспортного средства на основании знаний о дороге, находящейся впереди, так чтобы потребление топлива могло быть настолько низким, насколько это возможно. Это может достигаться, например, посредством функций устройства автоматического поддержания скорости движения, посредством которых для опорной скорости Vref может быть предоставлена возможность отклонения от скорости Vcc, выбранной водителем, на основании знаний о маршруте транспортного средства, для того чтобы посредством этого эксплуатировать транспортное средство более экономичным по топливу способом.
Примером такого устройства автоматического поддержания скорости движения является такой, который использует так называемую функцию "упреждения". Устройство автоматического поддержания скорости движения с функцией упреждения (LACC) является устройством автоматического поддержания скорости движения, которое использует знания о предстоящих участках дороги, то есть знания о характере предстоящей дороги, для того, чтобы определить сигнал Vref для управления опорной скоростью, и также соответственно для того, чтобы корректировать скорость транспортного средства в соответствии с изменениями дороги, по которой едет транспортное средство.
Тяжелые транспортные средства часто имеют автоматически управляемые коробки передач, при помощи чего управление переключением передач осуществляется посредством соответствующей бортовой системы управления, например системы управления коробкой передач. Поддержка системы управления транспортным средством LACC также может быть более значительной в результате применения одной или более систем управления транспортного средства так, чтобы транспортное средство эксплуатировалось настолько экономично, насколько это возможно, например, в результате некоторого снижения его скорости при окончании восходящего уклона, следующего за нисходящим уклоном, на котором транспортное средство будет подвергаться составляющей положительного ускорения, обеспечиваемого силой тяжести в направлении движения, и вследствие этого снова будет ускоряться до желаемой скорости.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения состоит в том, чтобы предложить способ эксплуатации транспортного средства, который сможет дополнительно сократить потребление топлива транспортными средствами, приводимыми в действие двигателем внутреннего сгорания, особенно во время эксплуатации на спусках. Эта задача решается с помощью способа по пункту 1 формулы изобретения.
Настоящее изобретение относится к способу эксплуатации транспортного средства, предусмотренному с двигателем, например двигателем внутреннего сгорания, который может избирательно присоединяться к по меньшей мере одному ведущему валу для подачи движущей силы на упомянутый ведущий вал для движения упомянутого транспортного средства вперед. Когда упомянутое транспортное средство находится в движении, способ содержит этапы, на которых
- определяют, приближается ли транспортное средство к нисходящему уклону, и, когда транспортное средство приближается к упомянутому нисходящему уклону, отсоединяют упомянутый двигатель от упомянутого по меньшей мере одного ведущего вала перед тем, как транспортное средство достигнет упомянутого нисходящего уклона.
Это дает преимущество в том, что, согласно настоящему изобретению, снижение скорости может достигаться перед нисходящим уклоном, по меньшей мере, частично посредством размыкания силовой передачи (так называемым движением накатом). Это предоставляет возможность снижения скорости транспортного средства перед нисходящим уклоном экономичным способом и использования последующего нисходящего уклона снова для ускорения транспортного средства до желаемой скорости. Размыкание силовой передачи, вместо простого прекращения подачи топлива в двигатель, приводит к экономии топлива таким образом, что скорость снижается и, как следствие, снижение потребления топлива может происходить на более раннем этапе, чем это было возможно ранее.
Другие признаки настоящего изобретения и его преимущества указаны посредством подробного описания примеров вариантов осуществления, изложенных ниже, и прилагаемых чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1А изображает силовую передачу в транспортном средстве, в котором может быть использовано настоящее изобретение;
Фиг. 1В изображает блок управления в системе управления транспортным средством;
Фиг. 2 изображает пример нисходящего уклона, к которому может применяться настоящее изобретение;
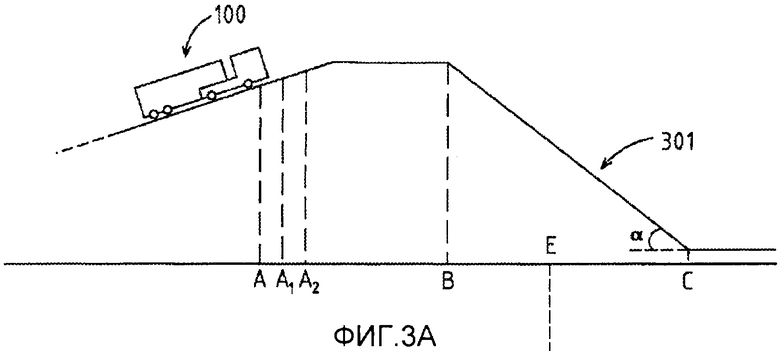
Фиг. 3А изображает транспортное средство на нисходящем уклоне с таким углом наклона, что транспортное средство будет ускоряться как при движении накатом, так и при торможении двигателем;
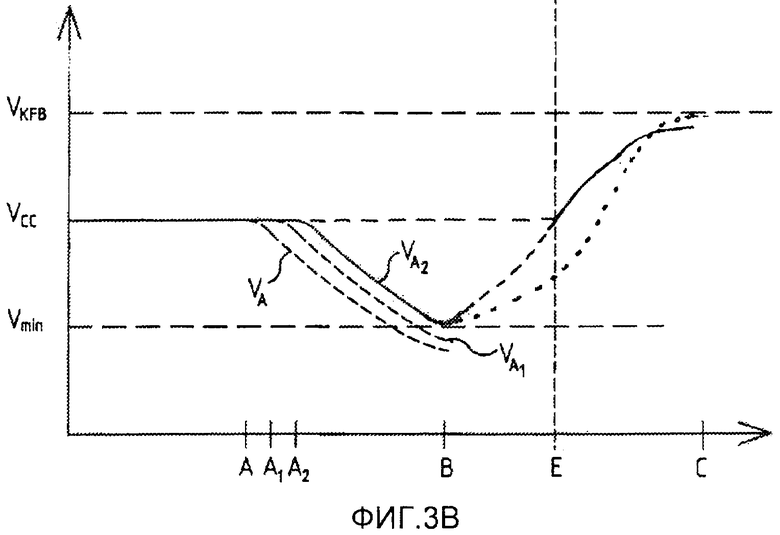
Фиг. 3В схематически изображает соответствующие скорости транспортного средства при движении накатом и при торможении двигателем на нисходящем уклоне, изображенном на Фиг. 3А;
Фиг. 3С схематически изображает соответствующие потребления топлива транспортным средством, изображенным на Фиг. 3А, при движении накатом и при торможении двигателем;
Фиг. 4 иллюстрирует пример способа согласно настоящему изобретению.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
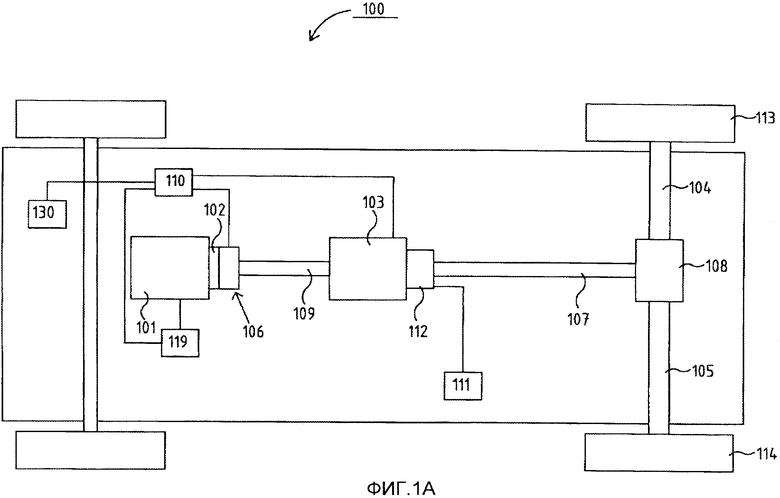
Фиг. 1А схематически изображает силовую передачу в транспортном средстве 100 согласно варианту осуществления настоящего изобретения. Силовая передача содержит двигатель внутреннего сгорания 101, который присоединяется обычным способом, посредством выходного вала двигателя, обычно посредством маховика 102, к входному валу 109 коробки передач 103 посредством муфты 106 сцепления. Муфта сцепления, например, может принимать форму муфты сцепления с автоматическим управлением и может быть управляемой посредством системы управления транспортным средством через блок 110 управления. Блок 110 управления также управляет коробкой передач 103. Транспортное средство 100 дополнительно содержит ведущие валы 104, 105, которые присоединяются к ведущим колесам 113, 114 транспортного средства и приводятся в движение посредством выходного вала 107 коробки передач 103 посредством шестерни оси 108, например простого дифференциала.
Транспортное средство 100 дополнительно содержит другие различные системы торможения, например простую рабочую систему торможения, которая может, например, содержать тормозные диски, соединенные с тормозными колодками (не изображены), расположенные смежно с каждым колесом. Рабочая система торможения управляется системой управления транспортным средством посредством блока 111 управления тормозом, который обычным образом посылает сигналы, например, на регулятор или регуляторы, которые регулируют усилие торможения в рабочей системе торможения.
Блок 111 управления тормозом может также быть выполнен с возможностью управления другими бортовыми системами торможения транспортного средства, а также рабочей системой торможения. Тяжелые транспортные средства часто обеспечиваются дополнительными системами торможения, например, в виде обычных замедлителей 112 и/или других дополнительных систем торможения, таких как различные виды систем дросселирования выхлопа при торможении двигателем и тормоза двигателя. На основании команд, инициируемых водителем транспортного средства и/или другими блоками управления, блок 111 управления (или какой-нибудь другой подходящий блок управления) отправляет сигналы управления на подходящие блоки системы, чтобы запросить желаемую силу торможения от требуемых систем торможения. Дополнительные системы торможения также могут непосредственно управляться водителем, например, посредством кнопок или педалей, в случае когда педаль или рычаг может быть непосредственно присоединенным к еще одному блоку управления, который отправляет информацию, например, на блок управления тормозом-замедлителем.
Системы управления в современных транспортных средствах в целом содержат системы шин связи, состоящие из одной или более шин связи для соединения нескольких электронных блоков управления (ECUs) вместе или контроллеров и различных бортовых компонентов транспортного средства. Такая система управления может содержать большое количество блоков управления и ответственность за конкретную функцию может быть разделена между двумя или более из них. Транспортные средства данного типа, имеющие отношение к материалам настоящей заявки, вследствие этого, часто предусматриваются со значительно большим количеством блоков управления, чем изображено на Фиг. 1A, как обязательно будет приниматься во внимание специалистом в данной области техники.
В изображенном варианте осуществления, настоящее изобретение реализовано в блоке 130 управления, но может также быть реализовано полностью или частично в одном или нескольких других блоках управления уже находящихся на борту транспортного средства или блоке управления, предназначенном для настоящего изобретения. Транспортное средство, изображенное на Фиг. 1А, также предусмотрено с блоком 130 управления, в котором функция упреждения для использования, например, в так называемом устройстве автоматического поддержания скорости движения (LACC) с функцией упреждения, как реализовано выше.
Управление, осуществляемое блоком 110 управления посредством коробки передач 103, таким образом, будет зависеть не только, например, от блока управления 119 двигателем, но также от информации, принятой из блока 130 управления.
Блоки управления данного типа, имеющие отношение к материалам настоящей заявки, обычно, выполнены с возможностью приема сигналов датчиков из различных частей транспортного средства, например, блок 110 управления может принимать сигналы датчиков коробки передач 103 и сигналы, например, блока 111 управления тормозом и блока 119 управления двигателем, а также блока 130 управления. Блоки управления данного типа, имеющие отношение к материалам настоящей заявки, также обычно выполнены с возможностью передачи сигналов управления к различным частям и узлам транспортного средства. В настоящем примере, блок 130 управления передает сигналы блоку 110 управления, который сам передает сигналы на различные устройства управления для того, чтобы потребовать необходимые передаточные числа в коробке 103 передач и размыкание/смыкание муфты 106.
Управление часто регулируется посредством программных инструкций, обычно в виде компьютерной программы, которая при выполнении на компьютере или блоке управления побуждает компьютер/блок управления осуществлять желаемые формы управляющего воздействия, например этапы способа, согласно настоящему изобретению. Компьютерная программа обычно принимает форму компьютерного программного продукта 129, который хранится на цифровом носителе данных 121 (см. Фиг. 1В), например ROM (постоянном запоминающем устройстве), PROM (программируемом постоянном запоминающем устройстве), EPROM (электрически-стираемом программируемом ПЗУ), флэш-памяти, EEPROM (электронно-перепрограммируемой постоянной памяти), жестком диске и т.д., или соединен с блоком управления, и который реализуется посредством блока управления. Поэтому поведение транспортного средства в конкретной ситуации можно корректировать посредством изменения инструкций компьютерной программы.
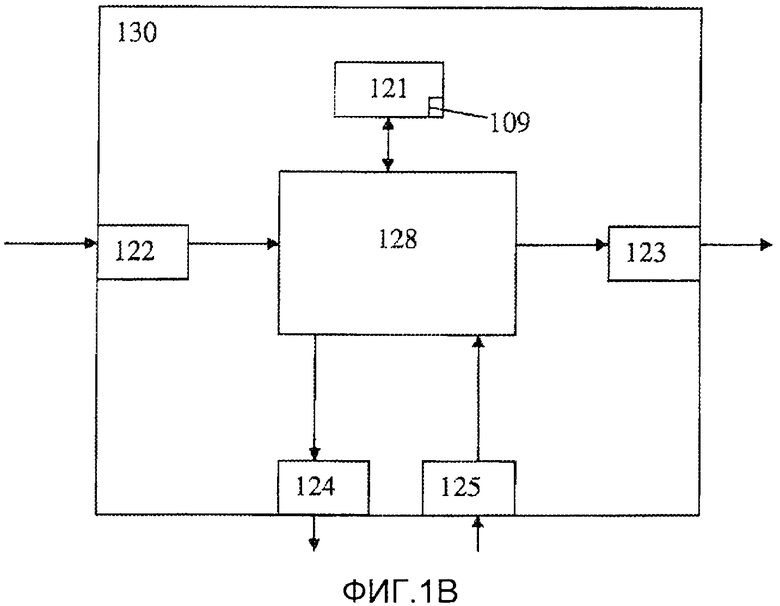
Пример блока управления (блока 130 управления) изображен схематически на Фиг. 1В, может содержать вычислительное устройство 128, которое может, например, принимать форму какого-нибудь процессора или микрокомпьютера подходящего типа, например схемы для цифрового сигнального процессора (DSP) или схемы с заранее определенной функцией (Специализированной Интегральной Схемы, ASIC). Вычислительное устройство 128 подключается к запоминающему устройству 121, которое предусматривается, например, с сохраненной управляющей программой 129 и/или сохраненными данными, которые необходимы вычислительному устройству для того, чтобы иметь возможность выполнять вычисления. Вычислительное устройство 128 также выполнено с возможностью сохранять частные или окончательные результаты вычислений в запоминающем устройстве 121.
Блок управления дополнительно предусмотрен с соответствующими устройствами 122, 123, 124, 125 для приема и отправки входящих и выходящих сигналов. Эти входные и выходные сигналы могут содержать формы сигнала, импульсы или другие характерные свойства, которые принимающие устройства 122, 125 входного сигнала могут обнаруживать в качестве информации и которые могут быть преобразованы в сигналы, которые может обрабатывать вычислительное устройство 128. По этой причине, сигналы передаются на вычислительное устройство 128. Передающие устройства 123, 124 выходного сигнала выполнены с возможностью преобразования сигналов, принятых из вычислительного устройства 128 для того, чтобы, например, посредством их модуляции, создать выходные сигналы, которые могут передаваться в другие части системы управления транспортным средством и/или узлу/узлам для которых предназначены данные сигналы. Каждое из соединений с соответствующими устройствами для приема и передачи входных и выходных сигналов может принимать форму одного или более из числа кабелей, шину передачи данных, например CAN (сети контроллеров) шины, MOST (передачи данных мультимедийных систем) шины или шины другой конфигурации, или беспроводного соединения.
Как упоминалось выше, экономия топлива транспортным средством может быть улучшена посредством использования LACC (устройства автоматического поддержания скорости движения с функцией упреждения), предназначенного для того, чтобы уменьшать скорость транспортного средства в конце восходящего уклона или на ровном участке дороги, который предшествует нисходящему уклону, для того, чтобы впоследствии извлечь выгоду от снижения требования движущей силы на последующем нисходящем уклоне, где это требование часто является отрицательным, то есть так, что транспортное средство может ускоряться путем позитивных вкладов силы тяжести, без подачи топлива, которое должно подаваться в двигатель.
Однако, согласно настоящему изобретению, потребление топлива может дополнительно сокращаться посредством способа, которым осуществляется снижение скорости перед нисходящим уклоном, который будет описан со ссылкой на Фиг. 3А-В, и способа 400, который изображен на Фиг. 4. Способ 400 начинается с этапа 401, на котором определяют, приближается ли транспортное средство к нисходящему уклону. Это определение может проводиться непрерывно до тех пор, пока не будет определено, что транспортное средство достигнет нисходящего уклона в пределах, например определенного промежутка времени, например, определенного количества секунд или в пределах определенного расстояния, например определенного количества метров, например 100 м, 200 м, 300 м и т.д.
Это определение выполняется посредством функции упреждения, которая, вследствие этого, реализуется в блоке 130 управления на Фиг. 1А, но может также быть реализована в каком-либо другом бортовом блоке управления. Как упомянуто выше, LACC использует знания будущего маршрута транспортного средства для того, чтобы корректировать скорость транспортного средства, в соответствии с преобладающими обстоятельствами. Знание участка дороги впереди может, например, содержать преобладающий рельеф, кривизну дороги, дорожную ситуацию, состояние дороги и ограничение скорости для участка, лежащего впереди, и также дорожных знаков, расположенных рядом с дорогой.
На основании этой информации и информации о местоположении транспортного средства, которая может, например, быть получена в виде информации из подходящих систем позиционирования и/или навигационных систем, таких как телемачтовая система и/или навигационная спутниковая система, например информации GPS (глобальная система позиционирования), функция LACC может определять, как много времени и/или расстояния осталось до того, как транспортное средство достигнет нисходящего уклона. Прогнозы погоды/данные от метеорологических приборов также могут быть использованы в описанных ниже вычислениях, согласно настоящему изобретению, когда, например, сильный попутный/встречный ветер может повлиять на движущую силу, требуемую для движения транспортного средства вперед.
Фиг. 3А изображает нисходящий уклон 301 с углом наклона (градиентом), который, как сказано ниже, является таким, что транспортное средство 100, приведенное для примера, по меньшей мере, ускоряется, когда движется накатом. Когда после этого этап 401 определяет, что транспортное средство приближается к нисходящему уклону, который может быть, например, в местоположении А на Фиг. 3А, то есть еще когда транспортное средство по-прежнему находится на восходящем уклоне, способ переходит на этап 402.
Согласно настоящему изобретению, перед нисходящим уклоном снижение скорости осуществится, по меньшей мере, частично посредством движения накатом.
Исторически снижение скорости осуществлялось за счет сокращения потребности в положительном крутящем моменте двигателя (то есть двигателя, передающего тяговую мощность в направлении движения посредством ведущих колес) или торможения двигателем. Торможение двигателем означает эксплуатацию транспортного средства с сомкнутой силовой передачей, то есть с двигателем, присоединенным к ведущим колесам, но без подачи топлива в двигатель. Преимущество этого типа заключается в том, что, так как подача топлива прекращена, то и потребление топлива также будет нулевым. Тем не менее, это означает, что двигатель будет приводиться в действие ведущими колесами посредством силовой передачи, состояние, известное как "торможение двигателем", при котором внутренние потери двигателя приводят к усилию торможения, то есть транспортное средство тормозит двигателем.
Настоящее изобретение применяет это вместо движения накатом, что означает, что двигатель 101 транспортного средства отсоединен от ведущих колес 113, 114, то есть силовая передача разомкнута. Это отсоединение посредством размыкания силовой передачи может достигаться, например, за счет переключения коробки 103 передач в нейтральное положение или путем размыкания муфты 106 сцепления. Отсоединение двигателя от ведущих колес, когда транспортное средство находится в движении, указывается ниже ссылкой как движение накатом. Движение накатом приведет к сокращению потребления топлива, и причина для этого подробно описана в параллельной заявке на выдачу патента Швеции 1150527-8 под названием "Способ и система, относящиеся к транспортным средствам I", с той же датой подачи изобретателем и заявителем как в настоящей заявке.
Следовательно, на этапе 402 определяют, должна ли уже быть разомкнута силовая передача, и транспортное средство, таким образом, побуждаться к движению накатом, в местоположении А для того, чтобы достичь требуемого снижения скорости до того, как начнется нисходящий уклон, или должна ли силовая передача оставаться сомкнутой с запросом на положительный крутящий момент на дополнительный период времени.
Это определение может быть сделано посредством функции LACC и подходящих данных из системы управления транспортным средством, например текущих данных нагрузки двигателя из блока 119 управления двигателем. На основании преобладающей нагрузки двигателя и данных LACC, как упоминалось выше, вес транспортного средства может быть оценен, и также возможно будет оценить, как будет изменяться его скорость, когда разомкнута силовая передача.
Если силовая передача не должна размыкаться, способ переходит к этапу 403 и остается там до тех пор, пока таймер t1 не достигнет времени T1, которое может быть, например, одной секундой или короче или более длинным периодом времени. Этот период может, например, также управляться преобладающей скоростью транспортного средства. Когда таймер t1 достигает времени T1, способ возвращается к этапу 402 для другого определения, должна ли быть разомкнута силовая передача.
Согласно этому варианту осуществления, транспортное средство, таким образом, будет проходить расстояние, соответствующее времени Т1 между определениями на этапе 402, так что последующие определения для местоположения являются A1, A2 и т.д. на Фиг. 3А.
Определение на этапе 402 может выполняться несколькими различными способами и на основании различных критериев. Это, например, возможно определить на этапе 402, как далеко и/или до какого уровня упадет скорость транспортного средства в начале нисходящего уклона, если двигатель отсоединен от ведущих колес в местоположениях А (или какого бы местоположения транспортное средство ни достигло в одном или более случаев, когда время t1, как описано выше, достигает времени T1, то есть A1, A2 и т.д.).
В зависимости от оставшегося расстояния до начала нисходящего уклона, то есть местоположения В на Фиг. 3А, и в зависимости от того, где на восходящем уклоне транспортное средство находится в это время, его скорость будет уменьшаться в большей или меньшей степени, когда двигатель отсоединяется и положительная движущая сила, следовательно, больше не передается на его ведущие колеса.
Скорость транспортного средства проиллюстрирована на Фиг. 3B. Скорость VCC может быть, например, скоростью, установленной водителем транспортного средства, которая является также скоростью, которую транспортное средство будет поддерживать, если оно было оборудовано традиционным устройством автоматического поддержания скорости движения, которое будет стремиться к тому, чтобы заданная скорость поддерживалась как при движении на подъем, так и при движении на спуске. Она также является скоростью, которую транспортное средство поддерживает (по меньшей мере) до местоположения А. Если в местоположении А двигатель отсоединяется, скорость транспортного средства начнет падать и снижение скорости будет продолжаться, по меньшей мере, до местоположения В, где начинается нисходящий уклон. Этап 402 может, например, определить, оценена ли скорость транспортного средства, чтобы падать ниже скорости Vmin, и силовая передача не размыкается до тех пор, пока результат оценки будет таков, что скорость транспортного средства снизится ниже Vmin.
Скорость vmin может, например, быть наиболее низкой скоростью, которая считается уместной для избежания слишком большого дискомфорта для водителя транспортного средства. Если установлено слишком низкое значение скорости vmin, водитель также может переживать состояние напряжения от участников дорожного движения, когда транспортные средства не имеют преимуществ таких систем, которые оказывают помощь в сокращении потребления топлива. Если будет допущена слишком низкая скорость транспортного средства, с точки зрения водителя это может быть негативным. В соответствии со временем, также может быть установлена скорость vmin. Если скорости транспортного средства предоставляется возможность отклоняться на слишком большую величину от VCC, общее время его поездки может пострадать вследствие более высоких затрат с точки зрения зарплаты водителя и т.д. Скорость Vmin следовательно, может быть выбрана согласно функции стоимости, например, могут быть использованы стратегии, согласно способу, упомянутому в заявке на выдачу патента Швеции 1050809-1. Скорость vmin также может быть определена, по меньшей мере, частично на основании повышения скорости, которой, как ожидается, будет подвергнуто транспортное средство при движении с горы.
Вместо того чтобы на основании скорости, которая будет достигнута, определить, должна ли размыкаться силовая передача, решение на каждом этапе вместо этого может быть основано на функции стоимости. Так же, как и со ссылкой на SE1000716, как указано выше, можно использовать стоимостную функцию типа
чтобы определить местоположения для размыкания силовой передачи. CstA1 означает стоимость размыкания силовой передачи в местоположении Ai, стоимость которого может быть сравнена для различных местоположений Ai и предоставляет возможность размыкания силовой передачи в каком бы ни было местоположении Ai, приводящем к наиболее низкой стоимости. FuelA является совокупным расходом топлива, если силовая передача разомкнута в местоположении Ai, и fuelVcc - совокупный расход топлива, если транспортное средство продолжают эксплуатировать на скорости VCC. Подобным образом, timeA является временем, которое требуется, чтобы привести в движение транспортное средство, если силовая передача в местоположении Ai разомкнута, тогда как timev является временем, которое требуется для приведения в действие транспортного средства на скорости vcc. c1, c2 являются соответствующими весовыми постоянными, которые регулируют значения меньших сбережений топлива по отношению к более длительному времени поездки. Множество постоянных c1, c2 могут, например, быть равными 1. Таким образом, определение стоимости размыкания силовой передачи в различных местоположениях предоставляет ей возможность размыкаться при каких бы то ни было результатах определения местоположения при наиболее низкой общей стоимости в соответствии с приведенным выше уравнением.
Принятие решений, согласно функции стоимости, также может быть сопряжено с определенными вторичными условиями, например решения, которые бы привели к скорости транспортного средства, снижающейся ниже Vmin, могут быть отклонены.
Также возможно, чтобы сравнить функцию стоимости для движения накатом с соответствующей функцией стоимости для движения с торможением двигателем, в результате чего низшая стоимость, при условии применимости вторичных условий, приводит к оптимальному управлению.
В настоящем примере, на основании определения скорости, как указано выше, скорость транспортного средства, если силовая передача разомкнута в местоположении A, будет падать ниже Vmin, как проиллюстрировано прерывистой линией VA от местоположения А до местоположения В на Фиг. 3В. Вследствие этого, как указано выше, способ, после определения в местоположении А, переходит к этапу 203 и остается там в течение времени Т1, до того как будет выполнено определение. Во время этого промежутка времени транспортное средство будет, как сказано выше, двигаться до местоположения A1. В местоположении А1 все еще обнаруживается, что скорость транспортного средства будет падать до слишком низкого уровня, за ломаную линию VA1, таким образом, для другого определения, способ вновь ожидает период T1 на этапе 403, когда транспортное средство проедет немного дальше. Это повторяется до тех пор, пока не будет обнаружено на этапе 402, что скорость транспортного средства не снизится ниже Vmin, которая, в данном примере, имеет место в местоположении А2. В этой ситуации, этап 402, таким образом, определяет, что силовая передача должна быть разомкнута, так что способ переходит к этапу 404, на котором силовая передача размыкается сразу, как только транспортное средство уже будет в местоположении А2, например посредством размыкания муфты 103 сцепления или переключением коробки передач в нейтральное положение.
Когда силовая передача была разомкнута, скорость транспортного средства будет, как упомянуто выше, снижаться и в местоположении В будет достигать Vmin (или, по меньшей мере, скорости, близкой к Vmin, в зависимости от того, когда размыкание силовой передачи действительно имеет место, например, по причине задержек в системе и т.д.), так что начало нисходящего уклона побуждает транспортное средство, как описано выше, ускоряться вновь путем положительного вклада от силы тяжести.
Таким образом, определение времени для размыкания силовой передачи транспортного средства описано выше, в соответствии со способом, посредством которого транспортное средство движется между определениями. В соответствии с альтернативным вариантом осуществления, однако, определения времени/местоположения для размыкания силовой передачи имеют место, уже когда транспортное средство достигает местоположения A. Этот случай включает в себя использование способа, подобного проиллюстрированному этапами 402-403 на Фиг. 4, за исключением того, который имеет место на этапе 403 местоположения Ai (где при первом определении Ai = А), таймер незамедлительно увеличивается на расстояние S1, которое, например, может быть 1 метр, 5 метров, 10 метров, 20 метров какого-нибудь другого подходящего расстояния. Расстояние может, например, также определяться в результате того, как далеко транспортное средство движется на текущей скорости в течение определенного промежутка времени, например время определяется в соответствии с вышеупомянутым таймером t1.
Затем на этапе 402 выполняется определение скорости, которую будет иметь транспортное средство в местоположении В, если в местоположении Ai силовая передача разомкнута, что в данном варианте осуществления означает, что на практике оценка уже сделана до того, как транспортное средство достигнет местоположения Ai. Это достигается в результате использования текущих данных о, например, скорости транспортного средства, приложенном крутящем моменте и данных LACC для оценки, как будет вести себя транспортное средство, если силовая передача разомкнута в местоположении Ai. Если определено, что скорость транспортного средства будет слишком низкой, если силовая передача разомкнута в местоположении Ai, способ возвращается к этапу 403 для приращения другого расстояния (Ai=Ai+s1), и на этапе 402 имеет место еще одно определение. Это повторяется до тех пор, пока местоположение Ai не будет определено, при котором удовлетворяется режим скорости.
Большое различие в этом варианте осуществления, таким образом, заключается в том, что скорость транспортного средства в местоположении В уже оценивается для множества местоположений Ai, по существу, в местоположении А, предпочтительней не раньше, чем достигнуто местоположение Ai (транспортное средство, конечно, может покинуть местоположение А, перед тем как определение закончено, в зависимости от того, сколько времени занимает оценка). Когда местоположение для размыкания силовой передачи было, согласно этому варианту осуществления, определено на этапе 402, транспортное средство практически ожидает достижения местоположения Ai и на этапе 404 силовая передача может быть разомкнута.
Когда двигатель, таким образом, на этапе 404 был отсоединен от ведущих колес и транспортное средство, вследствие этого, движется накатом, способ переходит к этапу 405, который определяет, как должно эксплуатироваться транспортное средство, когда оно достигает местоположения B, то есть когда начинается нисходящий уклон.
Для снижения потребления топлива на спуске могут быть предприняты различные меры. Одна такая мера является эксплуатацией транспортного средства при торможении двигателем. Как указано выше, однако, это приводит к действию торможения, то есть транспортное средство тормозит двигателем.
Внутренние потери двигателя, как правило, относятся к его собственной частоте вращения таким образом, что они увеличиваются с повышением частоты вращения двигателя, и, следовательно, силе торможения двигателем тоже. Так, торможение двигателем управляется на такой высокой передаче, насколько возможно сцепление в коробке передач (то есть в таком низком передаточном отношении, насколько это возможно), чтобы снизить частоту вращения двигателя, а следовательно, и его потери во время торможения двигателем.
По этой причине, это может быть выгодно вместо того, чтобы позволить транспортному средству двигаться накатом на спуске.
Однако, в случае движения накатом, ведущие колеса не подвергаются какому-либо эффекту торможения двигателем, что означает, что транспортное средство будет катиться по нисходящему склону более свободно и, тем самым, достигать более высокой скорости в конце нисходящего уклона по сравнению с торможением двигателем (транспортное средство может ускоряться до более высокой скорости или замедляться меньше, чем при торможении двигателем). Увеличение скорости в результате движения накатом, однако, достигается за счет потребления топлива, необходимого для поддержания эксплуатации двигателя на холостом ходу.
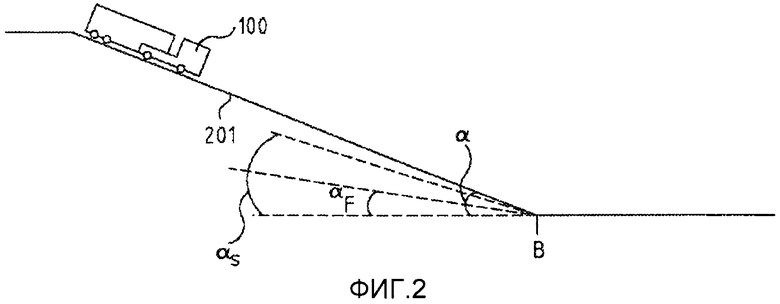
В зависимости от величины угла α наклона транспортное средство будет вести себя по-разному, когда, соответственно, будет тормозить двигателем и двигаться накатом. Фиг. 2 изображает пример нисходящего уклона с углом α наклона. В зависимости от величины угла α, транспортное средство будет подвергаться большему или меньшему положительному ускорению в направлении движения, то есть положительный вклад от силы тяжести будет оказывать содействие в движении транспортного средства, таким образом, потребность в движущей силе двигателя снижается или полностью исчезает. Если угол на Фиг. 2 является меньшим, чем угол αF, транспортное средство будет замедляться как при торможении двигателем, так и при движении накатом (хотя при движении накатом оно не будет замедляться так, как при торможении двигателем). Если α=αF, транспортное средство будут продолжать замедляться при торможении двигателем, но его ускорение во время движения накатом будет нулевым, то есть во время движения транспортного средства накатом, данный постоянный уклон с данным углом (αF), будет сохранять скорость, которую имел в начале нисходящего уклона. Если угол впоследствии увеличивается до α>αF, транспортное средство, с отсоединенным двигателем, при движении на спуске будет ускоряться и поэтому достигать в конце нисходящего уклона скорости, которая превышает ту, которую он имел в начале нисходящего уклона. Увеличивающийся угол приведет к большему ускорению, когда силовая передача разомкнута, в то время как замедление во время торможения двигателем также становится все меньше и меньше. Если угол α составляет αs, который является большим углом чем αF, ускорение транспортного средства во время торможения двигателем будет нулевым, то есть транспортное средство будет поддерживать свою скорость даже при торможении двигателем. Наконец, если угол α больше, чем αs, транспортное средство будет ускоряться как при торможении двигателем, так и при движении накатом.
Предварительно, только в ситуациях, в которых двигатель был отсоединен от ведущих колес, и поэтому транспортное средство двигалось накатом, были те, которые удовлетворяли условию α<αs, то есть только на нисходящих уклонах, где может быть возможным ускорение, когда транспортное средство двигается накатом, но не при торможении двигателем. Торможение двигателем используется, если угол α превышает αs. Это понятно, что торможение двигателем также приводит к ускорению при углах α>αs и в то же время к потреблению топлива, в отличие от случая движения накатом, равного нулю.
В противоположность, упомянутая параллельная заявка на выдачу патента Швеции 1150527-8, озаглавленная «Способ и система, относящаяся к транспортным средствам I", с той же датой подачи, изобретателем и заявителем, как и в настоящей заявке, описывает способ и систему, посредством которой транспортному средству предоставляется возможность движения накатом даже в ситуациях, когда α>αs, то есть, где транспортное средство будет ускоряться при торможении двигателем. Такой способ здесь также может быть использован.
Этап 405 определяет, должна ли силовая передача быть снова сомкнута, когда транспортное средство достигает местоположения B. Подобно вышеупомянутому, это определение может быть выполнено с возможностью иметь место, только когда транспортное средство достигает местоположения B, и этап 405 может предшествовать этапу ожидания, на котором способ остается до тех пор, пока транспортное средство не достигнет местоположения В. Согласно варианту осуществления, однако, определение уже начинается до того, как транспортное средство достигнет местоположения B, как описано выше относительно размыкания силовой передачи. Определение на этапе 405 может быть также использовано посредством функции LACC и данных из системы управления транспортным средством, как описано выше.
Транспортные средства данного типа, имеющие отношение к материалам настоящей заявки, часто имеют верхний предел скорости Vkfb, который находится выше, чем VCC, и не должен превышаться, например, вследствие действующих нормативных правовых актов или потому, что производитель автомобиля установил максимальную скорость. Скорость Vkfb также может задаваться водителем транспортного средства. Если эта скорость достигнута, обычно транспортное средство автоматически начинает использовать дополнительные системы торможения, чтобы гарантировать, что она не будет превышена.
По этой причине, этап 405, следовательно, определяет, после того, как транспортное средство достигло местоположения В, будет ли риск ускорения в результате последующего нисходящего уклона до скорости, превышающей упомянутую заданную скорость Vkfb.
В противном случае, то есть, если будет установлено, что транспортное средство может проехать весь нисходящий уклон, то есть до местоположения C, без достижения скорости Vkfb, оно эксплуатируется с отсоединенным от силовой передачи двигателем по всему нисходящему уклону, что предоставляет ему возможность ускориться на всем отрезке пути. В предшествующем уровне техники не применялось движение накатом на нисходящих уклонах, которые являются таковыми, так что транспортное средство будет ускоряться даже при торможении двигателем. В настоящем изобретении, наоборот, движение накатом используется даже в таких ситуациях, по меньшей мере, до тех пор, пока не будет достигнута скорость Vkfb. Это означает, что в местоположении С транспортное средство будет передвигаться быстрее, чем на скорости Vcc, так что оно может продолжать движение накатом за пределы местоположения С до тех пор, пока его скорость не снизится до Vcc. Это представлено на Фиг. 4 этапом 406, в котором способ остается пока скорость транспортного средства не упадет до VCC, после чего силовая передача смыкается на этапе 407 для нормального движения транспортного средства вперед. Способ затем возвращается к этапу 401 до другого уклона.
Если, наоборот, этап 405 определяет, что скорость Vkfb на нисходящем уклоне будет достигнута, в результате чего одна или более систем торможения транспортного средства должна быть введена в работу, чтобы предотвратить повышение скорости за пределы Vkfb, способ переходит к этапу 408.
Сценарий, в котором транспортное средство вначале ускоряется посредством движения накатом, только чтобы впоследствии притормозить, является нежелательным потому, что движение накатом приводит к потреблению топлива, чтобы поддерживать эксплуатацию двигателя на холостом ходу, которого по другому, по меньшей мере, частично могли бы избежать. Следовательно, этап 408 определяет, будет ли достигнута скорость VKFB, даже когда транспортное средство эксплуатируют с сомкнутой силовой передачей и никакой подачи топлива нет, то есть при торможении двигателем. Если скорость Vkfb будет достигнута даже при торможении двигателем, способ переходит к этапу 409, при котором силовая передача сомкнута, когда транспортное средство достигает местоположения B, с момента, когда торможение двигателем приводит к снижению потребления топлива, чем при движении накатом к местоположению, где будет достигнута скорость Vkfb. Такая ситуация представлена на Фиг. 3B посредством пунктирной линии из местоположения В.
Затем способ переходит к этапу 410, который определяет, достигло ли транспортное средство местоположения C. Способ остается на этапе 410, пока транспортное средство не достигнет местоположения С, и поэтому проходит нисходящий уклон. Способ затем переходит к этапу 411, на котором двигатель вновь отсоединяется от ведущих колес для возобновления движения накатом.
Так как его скорость в этом случае выше, чем VCC, транспортное средство может двигаться накатом, пока его скорость вновь не упадет до VCC. Поэтому, как сказано выше, способ переходит от этапа 411 на этап 406.
Если этап 408 определяет, что скорость Vkfb не будет достигнута, если транспортное средство эксплуатируют с сомкнутой силовой передачей на протяжении всего нисходящего уклона, но она должна достигаться, когда осуществляется движение накатом, как на этапе 405, способ переходит к этапу 412, который определяет, будет ли достигнута скорость Vkfb, если торможение двигателем начинается во время Т2 (или на расстоянии S2) после того, как транспортное средство проехало местоположение В. Время T2/расстояние S2 может быть любым подходящим временем/расстоянием, как описано выше, и может, например, быть постоянным или зависеть от преобладающего угла наклона нисходящего уклона. Это означает, что транспортному средству предоставляется возможность двигаться накатом определенный промежуток времени или расстояние, во время которого определяют, достигло ли оно скорости VKFB, если оно переключается в это время к торможению двигателем. В противном случае, таймер t2/расстояние s2 инкрементируется посредством дополнительного интервала T2/S2 и на этапе 413 и на этапе 412 выполняется другое определение.
Это определение может, таким образом, быть использовано посредством любого из способов, описанных выше относительно этапов 402-403, то есть оно может быть использовано для местоположения, где транспортное средство находится в это время, в этом случае итерация продолжается до тех пор, пока не будет определено, что скорость Vkfb достигнута, и в случае, в котором на этапе 414 силовая передача сомкнута, когда обнаружено, что скорость Vkfb будет достигнута посредством движения накатом. Альтернативно, определение может иметь место еще до того, как транспортное средство достигнет местоположения B, с определением местоположения для смыкания силовой передачи (после ее размыкания в местоположении В), и, когда транспортное средство достигает этого конкретного местоположения, на этапе 414, силовая передача может быть сомкнута.
Когда на этапе 414, силовая передача была сомкнута, таким образом, транспортное средство будет осуществлять торможение двигателем, чтобы использовать для исключения возможности достижения скорости Vkfb торможения двигателем. Способ затем переходит к этапу 415 для того, чтобы определить, отключена ли вновь силовая передача. Это может, например, быть обнаружено, когда транспортное средство ускоряется до скорости, близкой к Vkfb, что его скорость начинает снижаться, например, из-за того, что оно достигло конца нисходящего уклона или угол наклона уменьшился. Таким образом, необходимость торможения двигателем может иметь место только на более короткий промежуток, прежде чем силовая передача может быть разомкнута вновь, чтобы в результате движения накатом, без достижения скорости Vkfb предоставить транспортному средству возможность ускорения. В этой ситуации, как сказано выше, является выгодным размыкать силовую передачу, для того чтобы двигаться накатом, пока скорость транспортного средства не снизится до Vcc. Когда, таким образом, на этапе 415, определяют, что силовая передача должна быть разомкнута, это выполняется на этапе 416 и способ затем, как описано выше, переходит к этапу 406.
Способ, описанный выше, является таким, что транспортное средство сначала движется накатом, а впоследствии осуществляет торможение двигателем, если оно будет достигать скорости Vkfb, когда движется накатом, но не при торможении двигателем. Способ может, однако, также наоборот быть таким, что силовая передача является сомкнутой в местоположении В, прежде чем разомкнуться в местоположении Е между В и С, для которых определено, что скорость Vkfb не будет достигнута, когда силовая передача разомкнута.
Способ также может включать в себя разомкнутую силовую передачу и смыкаемую более чем один раз во время движения по нисходящему уклону, в зависимости от его длины и/или изменений угла его наклона.
Приведенное выше описание описывает движение накатом согласно способу, в соответствии с которым двигатель, при движении накатом, эксплуатируется на холостом ходу, приводя к потреблению топлива. Согласно варианту осуществления, когда осуществляется движение накатом, двигатель выключен, приводя к дополнительному снижению потребления топлива, по сравнению с ситуациями, где двигатель просто отсоединяется от ведущих валов и ситуациями, где транспортное средство осуществляет торможение двигателем. Двигатель может быть отключен для всего или одного или более промежутков времени, когда транспортное средство движется накатом.
Согласно варианту осуществления, двигатель отключается только в тех случаях, когда определено, что это является выгодным. Это, предоставляет возможность определять, например, может ли двигатель быть отключен в течение первого периода времени до его вынуждения быть перезапущенным. Это определение может быть, например, сделано, как указано выше, с помощью функции просмотра вперед. Промежуток времени может, например, быть основан на экономии топлива, достигаемой за счет отключения упомянутого двигателя, и может быть, например, промежутком, который, по меньшей мере, приводит к снижению потребления топлива, соответствующего тому, который возникает при перезапуске упомянутого двигателя стартером. Параллельная заявка на выдачу патента Швеции, озаглавленная "Метод и система, относящаяся к транспортным средствам III", с той же датой подачи, изобретателем и заявителем в качестве настоящей заявки, описывает способ и систему, при которой двигатель транспортного средства отключен во время движения накатом, когда отключение возможно для по меньшей мере первого периода времени. Такой способ здесь также может использоваться.
Настоящее изобретение не ограничено вышеописанными вариантами осуществления изобретения, но имеет отношение и содержит все варианты осуществления в пределах объема прилагаемой формулы изобретения. В упомянутом выше примере, движение накатом используется для снижения всей скорости вплоть до начала нисходящего уклона. Однако, согласно варианту осуществления, движение накатом может быть использовано вначале в случае, в котором уменьшение скорости может заканчиваться торможением двигателем. Преимущество этого состоит в том, что снижение скорости может быть быстро завершено, например, если будет установлено, что снижение займет больше чем определенное время, в ситуации, когда долгий период снижения скорости может вызвать неудобство для водителя транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2564066C2 |
| СПОСОБ И СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2570855C2 |
| СПОСОБ И МОДУЛЬ ДЛЯ ОПРЕДЕЛЕНИЯ, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО ОПОРНОГО ЗНАЧЕНИЯ | 2011 |
|
RU2598494C2 |
| ВЗАИМОДЕЙСТВИЕ С ВОДИТЕЛЕМ, ОТНОСЯЩЕЕСЯ К ЭКОНОМИЧНОМУ АВТОМАТИЧЕСКОМУ ПОДДЕРЖАНИЮ СКОРОСТИ | 2012 |
|
RU2594059C2 |
| ВЗАИМОДЕЙСТВИЕ С ВОДИТЕЛЕМ, ИМЕЮЩЕЕ ОТНОШЕНИЕ К СИСТЕМЕ КРУИЗ-КОНТРОЛЯ С РЕГУЛИРОВАНИЕМ РАСЧЕТНОЙ СКОРОСТИ | 2012 |
|
RU2598496C2 |
| МОДУЛЬ И СПОСОБ, ОТНОСЯЩИЕСЯ К ВЫБОРУ РЕЖИМА ПРИ ОПРЕДЕЛЕНИИ ЗНАЧЕНИЙ КОНТРОЛЬНОЙ ТОЧКИ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2556829C2 |
| СПОСОБ И СИСТЕМА ВОЖДЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2514610C2 |
| СПОСОБ И МОДУЛЬ ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2535833C2 |
| МОДУЛЬ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2010 |
|
RU2493025C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2011 |
|
RU2561658C1 |
Изобретение относится к области транспортного машиностроения, в частности к способам эксплуатации транспортных средств, содержащих двигатель, избирательно присоединяющийся к ведущему валу для подачи движущей силы на ведущий вал для движения транспортного средства. Способ содержит этапы, на которых определяют, приближается ли транспортное средство к нисходящему уклону, и, когда оно приближается к упомянутому нисходящему уклону, отсоединяют упомянутый двигатель от ведущего вала перед тем, как транспортное средство достигнет нисходящего уклона. Достигается сокращение потребления топлива транспортными средствами. 13 з.п. ф-лы, 6 ил.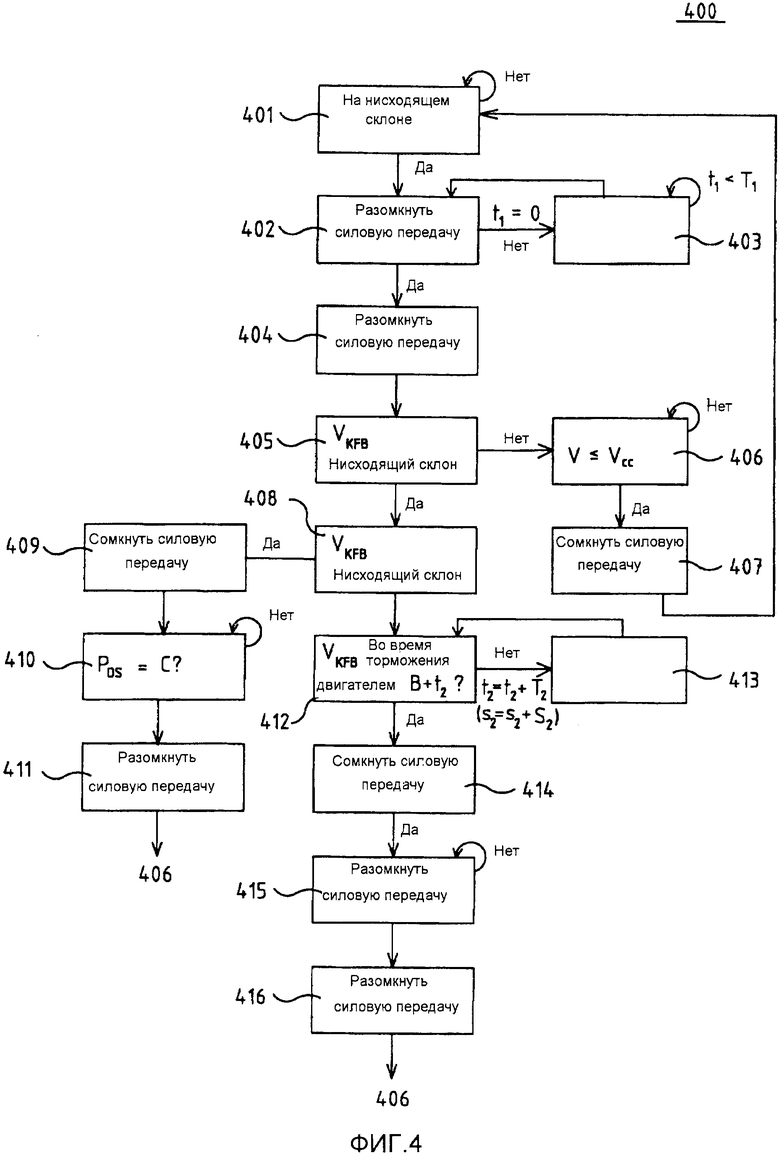
1. Способ эксплуатации транспортного средства (100), причем упомянутое транспортное средство (100) содержит двигатель (101), который может избирательно присоединяться к по меньшей мере одному ведущему валу (104, 105) для подачи движущей силы на упомянутый ведущий вал (104, 105) для движения упомянутого транспортного средства (100) вперед, причем способ, который во время эксплуатации упомянутого транспортного средства (100) содержит этапы, на которых:
определяют, приближается ли транспортное средство (100) к нисходящему уклону, и,
когда транспортное средство (100) приближается к упомянутому нисходящему уклону, отсоединяют упомянутый двигатель (101) от упомянутого, по меньшей мере, ведущего вала (104, 105) перед тем, как транспортное средство (100) достигнет упомянутого нисходящего уклона,
отличающийся тем, что, когда упомянутое транспортное средство достигает упомянутого нисходящего уклона,
определяют, достигнет ли скорость транспортного средства максимально допустимой установленной для него скорости при эксплуатации с упомянутым двигателем (101), отсоединенным от упомянутого ведущего вала (104, 105), и,
если транспортное средство (100) достигнет упомянутой максимально допустимой установленной для него скорости, эксплуатируют, по меньшей мере, частично на упомянутом нисходящем уклоне с упомянутым двигателем (101), соединенным с упомянутым ведущим валом (104, 105) без подачи топлива на упомянутый двигатель (101).
2. Способ по п. 1, дополнительно содержащий этап, на котором
проводят упомянутое определение посредством по меньшей мере одного блока (130) управления, расположенного в системе управления транспортным средством.
3. Способ по п. 1 или 2, дополнительно содержащий этап, на котором
определяют первое местоположение (Ai), в котором упомянутый двигатель (101) должен быть отсоединен от упомянутого по меньшей мере одного ведущего вала (104, 105).
4. Способ по п. 3, дополнительно содержащий этап, на котором
определяют упомянутое первое местоположение (Ai) на основании определения скорости, которую будет иметь транспортное средство (100), когда оно достигнет упомянутого нисходящего уклона, и/или определения снижения скорости, которому подвергнется упомянутое транспортное средство (100) от упомянутого первого местоположения (Ai), пока не достигнет упомянутого нисходящего уклона.
5. Способ по п. 3, дополнительно содержащий этап, на котором
определяют упомянутое первое местоположение (Ai) на основании снижения максимально допустимой скорости для упомянутого транспортного средства (100) и/или наиболее низкой допустимой скорости для упомянутого транспортного средства перед тем, как оно достигнет упомянутого нисходящего уклона.
6. Способ по п. 4, дополнительно содержащий этап, на котором
определяют упомянутое первое местоположение (Ai) на основании снижения максимально допустимой скорости для упомянутого транспортного средства (100) и/или наиболее низкой допустимой скорости для упомянутого транспортного средства перед тем, как оно достигнет упомянутого нисходящего уклона.
7. Способ по любому из пп. 1-2, 4-6, дополнительно содержащий этапы, на которых:
определяют ожидаемую скорость транспортного средства и/или ожидаемое снижение скорости в начале нисходящего уклона для множества местоположений (Ai) и
отсоединяют упомянутый двигатель (101) от упомянутого по меньшей мере одного ведущего вала (104, 105) в местоположении (Ai), для которого определено, что транспортное средство (100) будет, по существу, подвергнуто снижению максимально допустимой скорости и/или, по существу, достигнет наиболее низкой допустимой скорости перед тем, как оно достигнет упомянутого нисходящего уклона.
8. Способ по п. 5 или 6, в котором снижение упомянутой допустимой скорости и/или наиболее низкая допустимая скорость определяются, по меньшей мере, частично на основании потери времени, вызванной снижением скорости при упомянутом отсоединении упомянутого двигателя (101) от упомянутого по меньшей мере одного ведущего вала (104, 105).
9. Способ по п. 5 или 6, в котором снижение упомянутой максимально допустимой скорости и/или наиболее низкая допустимая скорость определяются, по меньшей мере, частично на основании повышения скорости, которому, как ожидается, подвергнется упомянутое транспортное средство (100) на упомянутом нисходящем уклоне.
10. Способ по любому из пп. 1-2, 4-6, дополнительно содержащий этап, на котором
определяют, подъедет ли транспортное средство (100) к нисходящему уклону и когда упомянутый двигатель (101) должен быть отсоединен от упомянутого по меньшей мере одного ведущего вала (104, 105) на основании данных, относящихся к будущему маршруту транспортного средства, например данных, относящихся к градиенту его маршрута, и/или на основании данных, относящихся к рельефу будущего маршрута транспортного средства (100), и/или местоположения транспортного средства.
11. Способ по любому из пп. 1-2, 4-6, дополнительно содержащий этап, на котором, когда упомянутое транспортное средство (100) достигает упомянутого нисходящего уклона,
эксплуатируют упомянутое транспортное средство (100) на упомянутом нисходящем уклоне с упомянутым двигателем (101), отсоединенным от упомянутого по меньшей мере одного ведущего вала (104, 105).
12. Способ по любому из пп. 1-2, 4-6, содержащий этап, на котором, когда упомянутое транспортное средство (100) достигает окончания упомянутого нисходящего уклона, эксплуатируют его с двигателем (101), отсоединенным от по меньшей мере одного ведущего вала (104, 105), по меньшей мере, до тех пор, пока транспортное средство перемещается со скоростью, выше заданной скорости (Vcc).
13. Способ по любому из пп. 1-2, 4-6, дополнительно содержащий этап, на котором определяют первое местоположение (Ai), в котором упомянутый двигатель (101) должен быть отсоединен от упомянутого по меньшей мере одного ведущего вала (104, 105), причем упомянутое первое местоположение (A1) определяется, по меньшей мере, частично на основании стоимостной функции со взвешенным значением сэкономленного топлива при движении накатом и потери времени при движении накатом.
14. Способ по любому из пп. 1-2, 4-6, дополнительно содержащий этап, на котором отключают упомянутый двигатель (101), по меньшей мере, на некоторое время, когда он отсоединен от упомянутого по меньшей мере одного ведущего вала (104, 105).
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |

