Изобретение относится к измерительной технике и предназначено для решения задач электромагнитной совместимости и экологической безопасности электротехнического и радиоэлектронного оборудования промышленных, транспортных, общественных и бытовых объектов.
Известен способ и устройство определения пространственного распределения характеристик электромагнитного поля в пространстве безэховой камеры, в которой установлен объект для испытания, излучающий электромагнитное поле, заключающийся в том, что пространство безэховой камеры сканируют датчиком напряженности электромагнитного поля, который перемещают по жестко закрепленным в ней направляющим. При этом координаты положения датчика напряженности электромагнитного поля в фиксированных точках пространства безэховой камеры определяют с помощью лазерной системы позиционирования. По величинам напряженности электромагнитного поля в фиксированных точках и их координатам воспроизводят диаграмму распределения напряженности электромагнитного поля в пространстве безэховой камеры [источник: Anechoic chamber related issues for very large automated planar near field range. / S. Christopher Aruna Rao Suma Varughese M.S. Easwaran. / Proceeding of the International Conference on Electromagnetic Interference and compatibility ∗98. 3-6 December 2098 Hyderabad, India, p.p.86-113].
Недостатком этого способа является отсутствие мобильности средств его реализации, что не дает возможности определять пространственное распределение напряженности электромагнитного поля относительно стационарных объектов, излучающих электромагнитные поля, например помещений, насыщенных электрооборудованием и рабочими местами, так как их невозможно установить в безэховой камере. Поэтому известный способ не может быть использован для формирования систем компенсации электромагнитного поля излучаемого электрооборудованием стационарных объектов.
За прототип принят способ определения пространственного распределения напряженности электромагнитного (электрического или магнитного) поля, при котором датчиком пространственного положения сканируют пространство, содержащее материальные объекты, в том числе излучающее это поле электрооборудование. При этом датчиком напряженности электромагнитного поля, совмещенным с указанным датчиком пространственного положения, фиксируют локальные значения напряженности электромагнитного поля. По текущим координатам датчиков и соответствующих им значениям напряженности электромагнитного поля вычисляют пространственное распределение напряженности, которое воспроизводят на экране монитора вычислительного устройства (Патент РФ №2215297).
Недостатком этого способа является высокая трудоемкость моделирования пространственного распределения напряженности электромагнитного поля с привязкой к координатам материальных объектов сложной формы, укомплектованных электрооборудованием, излучающим электромагнитные поля. Это обусловлено тем, что распределение электромагнитного поля, воспроизводимого относительно стереоскопического изображения материальных объектов, расположенных в этом пространстве, позволяет использовать полученные отображения только для субъективных оценок электромагнитной обстановки. Субъективные оценки не могут быть количественно нормированы и использованы в качестве расчетных данных, например, для проектирования системы компенсации электромагнитных полей. Поэтому для моделирования электромагнитной обстановки на объекте, характеризующей распределение напряженности электромагнитного поля в пространстве, насыщенном материальными объектами, необходимо многократное проведение стереосъемок этого пространства с взаимно смещенных позиций, что приводит к увеличению объема исходных данных и значительно усложняет процесс моделирования пространственного распределения напряженности электромагнитного поля с привязкой его характеристик к координатам пространственных объемов сложной формы, укомплектованных электрооборудованием, излучающим электромагнитные поля. Кроме того, в корабельных и производственных условиях такое моделирование также затруднено сложностью преобразования стереоскопических изображений помещений, насыщенных разнообразным оборудованием, кабельными трассами, рабочими местами и другими материальными объектами, особенно корпусными конструкциями, обуславливающей необходимость обработки чрезмерно больших объемов избыточной информации для определения координат материальных объектов.
Техническим результатом настоящего изобретения является снижение трудоемкости и упрощение моделирования пространственного распределения напряженности электромагнитного поля с привязкой его характеристик к координатам пространственных объемов сложной формы, укомплектованных электрооборудованием, излучающим электромагнитные поля.
Для достижения указанного технического результата на габаритных обводах материальных объектов, содержащихся в пространстве, выбирают контрольные точки. Поочередно устанавливая датчик пространственного положения в этих контрольных точках, определяют их координаты и воспроизводят на экране монитора. После чего на экране монитора вычислительного устройства с помощью трехмерного графического редактора воспроизводят трехмерные геометрические фигуры, отображающие габаритные обводы материальных объектов, с контрольными точками, совмещенными с воспроизведенными на экране монитора выбранными контрольными точками материальных объектов. Датчиком пространственного положения сканируют пространство, содержащее материальные объекты, в том числе излучающее поле электрооборудование. Датчиком напряженности электромагнитного поля, совмещенным с указанным датчиком пространственного положения, фиксируют локальные значения напряженности электромагнитного поля. При этом пространственное распределение напряженности электромагнитного поля определяют воспроизведением его относительно пространственного расположения трехмерных фигур, отображающих габаритные обводы моделируемых ими материальных объектов.
При реализации настоящего способа трудоемкость графического отображения габаритов объектов при использовании трехмерного графического редактора пренебрежимо мала по сравнению с трудоемкостью ввода исходных данных для пересчета стереоскопического изображения сложных форм материальных объектов в трехмерные. Математическая модель полученного распределения напряженности электромагнитного поля описывается в той же системе координат, что и трехмерные габаритные изображения материальных объектов, что не требует специального программного обеспечения для применения к ним типовых графических преобразований изображений (например, построения сечений по координатным плоскостям и т.п.). Это и обуславливает положительный эффект от реализации предложения, заключающийся в снижении трудоемкости при относительно невысоких требованиях к вычислительным мощностям, а следовательно, и стоимости реализующей его аппаратуры.
Пример реализации способа определения пространственного распределения напряженности электромагнитного поля поясняется чертежами:
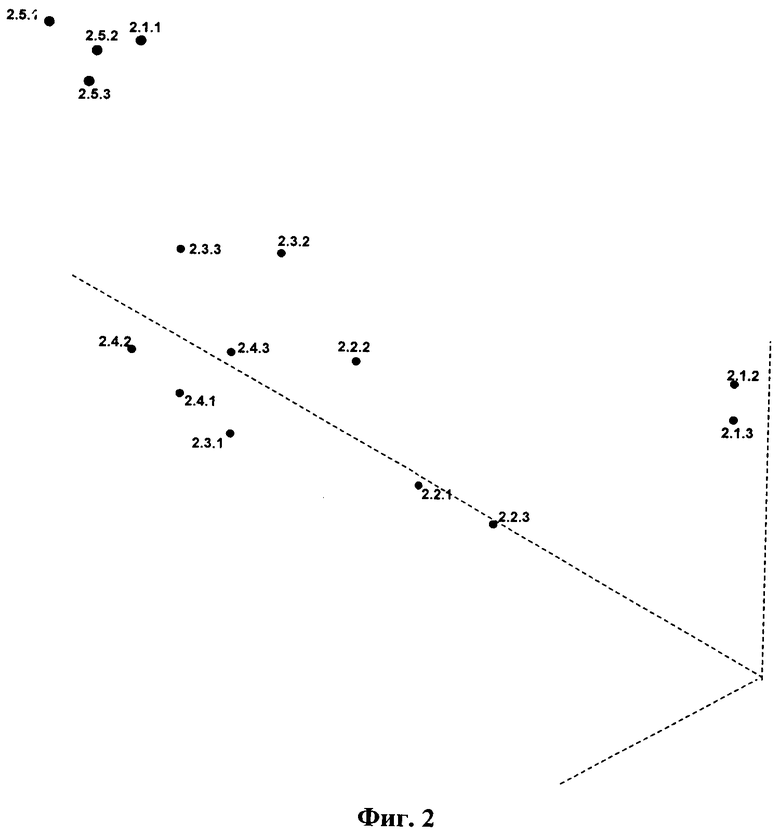
- на Фиг.1 изображено пространство, содержащее материальные объекты, в том числе электрооборудование, излучающее электромагнитное поле;
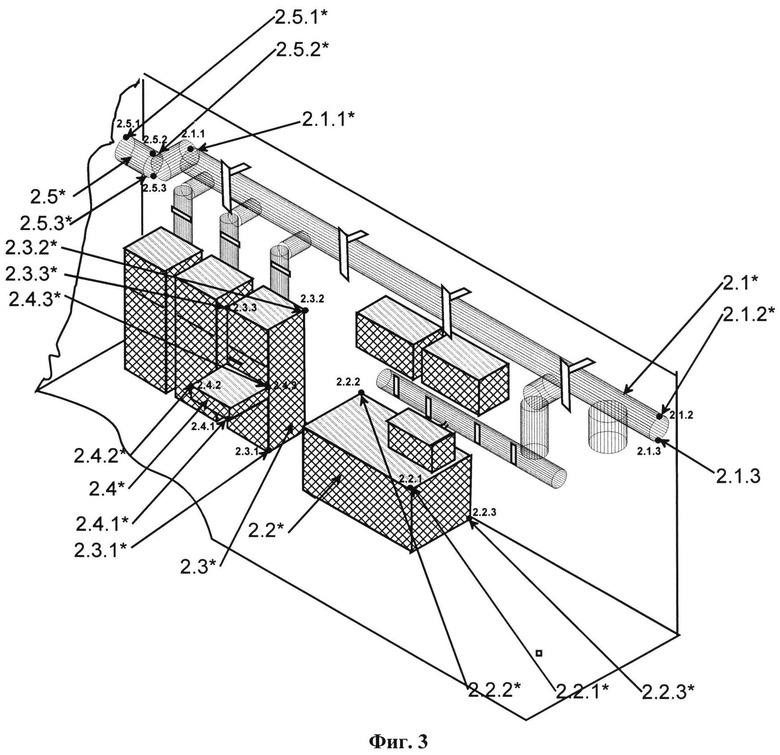
- на Фиг.2 изображено отображение на экране монитора вычислительного устройства контрольных точек габаритных обводов материальных объектов;
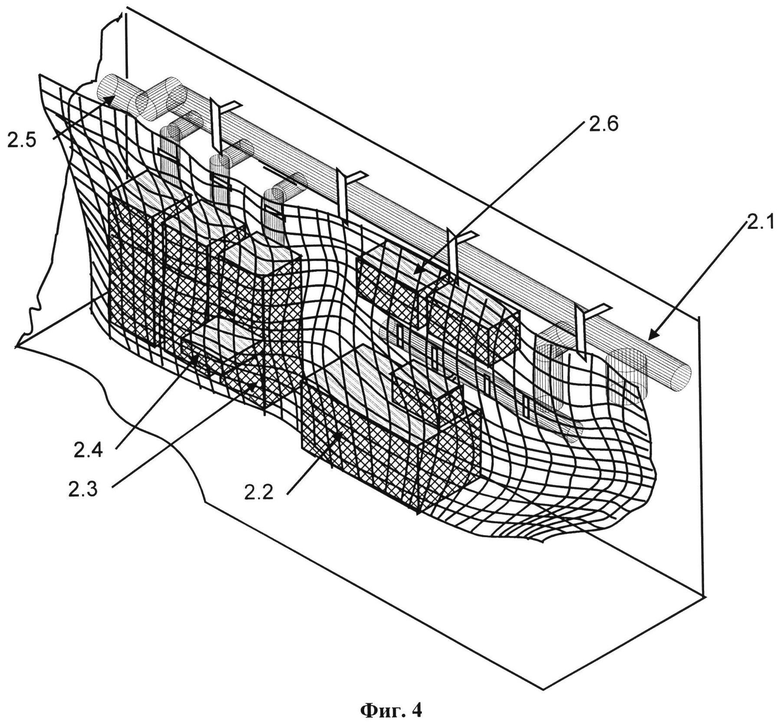
- на Фиг.3 изображено отображение на экране монитора вычислительного устройства геометрических фигур, моделирующих габаритные обводы материальных объектов;
- на Фиг.4 изображено пространственное распределение напряженности электромагнитного поля, воспроизведенное относительно пространственного расположения фигур, отображающих габаритные обводы моделируемых ими материальных объектов.
В ограниченном пространстве 1 (например, в машинном отделении корабля, на участке цеха и т.п.) расположены материальные объекты 2 (2.1, 2.2, …,2.5), в том числе электрооборудование, излучающее электромагнитное поле, помехочувствительное оборудование и рабочие места (Фиг.1). Также могут быть учтены и корпусные конструкции помещения (переборки, шпангоуты, а также двери, трапы и другие материальные объекты), на чертеже не показанные.
В пространстве 1 подвижно размещены перемещаемые вручную и скрепленные друг с другом датчик 3 напряженности электромагнитного поля и датчик 4 пространственного положения, реализуемый в виде ультразвукового передатчика, позиционируемого в системе координат, связанной с этим пространством. Для позиционирования датчика 4 в пространстве 1 также стационарно установлены по меньшей мере три ультразвуковых приемных модуля 5, взаимодействующих с датчиком 4. Приемные модули 5 подключены к модулю управления 6, определяющему в реальном времени положение датчика 4 в координатах пространства 1 путем триангуляции по величинам задержки приходящих от него на модули 5 ультразвуковых сигналов. Датчик 4, приемные модули 5 и модуль управления 6 в комплекте реализуют модульную систему позиционирования, взаимодействующую с вычислительным устройством 7. В качестве такой модульной системы позиционирования может быть использована, например, система RUCAP UM-16 поставляемая ООО «РУКЭП» и взаимодействующая с вычислительным устройством 7, функционирующим на базе операционной системы Windows 7 фирмы Майкрософт и снабженным также программным обеспечением, поддерживающим трехмерный графический редактор, например Autodesk 3ds Мах компании Autodesk Inc.
На мониторе вычислительного устройства 7 могут быть визуально воспроизведены геометрические фигуры 2.1∗, …2.5∗, отображающие материальные объекты 2.1,... 2.5, с контрольными точками соответственно 2.1.1∗, 2.1.2∗, 2.1.3∗, 2.2.1∗, …2.5.2∗, 2.5.3∗, обозначенные номерами, соответствующими отображаемым ими материальным объектам 2.1, …2.5 и выбранным на них контрольным точкам, соответственно 2.1.1, 2.1.2, 2.1.3, 2.2.1, …2.5.2, 2.5.3.
Например, габаритные обводы участка кабельной трассы 2.1 могут быть отображены цилиндром, образующая окружность которого задается выбранными на концах ее диаметра точками 2.1.2 и 2.1.3, а длина - точкой на удаленном конце 2.1.1. Эти точки однозначно определяют размер и положение цилиндра в отображении на экране монитора вычислительного устройства 7 пространства 1. Соответственно, габаритные обводы рабочего места 2 могут быть отображены параллелепипедом 2.2, грани которого параллельны осям выбранной системы координат. Размер и положение параллелепипеда 2.2 в пространстве 1 однозначно задается тремя выбранными контрольными точками, расположенными по его углам, соответственно, 2.2.1, 2.2.2. и 2.2.3.
При расположении габаритных обводов материальных объектов 2.1…2.5 сложной формы не по осям принятой для моделирования системы координат количество выбираемых контрольных точек может соответственно увеличиваться. При моделировании также могут быть применены и типовые операции объединения, вырезания, скашивания, вращения фигур 2.1∗ …2.5∗, предусмотренные в трехмерных графических редакторах.
Для реализации предлагаемого способа в пространстве 1, содержащем материальные объекты 2.1-2.5, выбирают контрольные точки 2.1.1, 2.1.2, 2.1.3, 2.2.1, …2.5.2, 2.5.3, однозначно определяющие расположение габаритных обводов материальных объектов 2.1 …2.5 в сканируемом пространстве.
Поочередно устанавливая датчик пространственного положения в контрольные точки 2.1.1, 2.1.2, 2.1.3, 2.2.1, 2.5.2, 2.5.3, определяют их координаты и воспроизводят на экране монитора вычислительного устройства 7 (Фиг.2).
С помощью трехмерного графического редактора на экране монитора вычислительного устройства 7 изображают трехмерные геометрические фигуры 2.1∗, …2.5∗, отображающие габаритные обводы материальных объектов 2.1 …2.5. При этом совмещают контрольные точки 2.1.1∗, 2.1.2∗, 2.1.3∗, 2.5.1∗, 2.5.2∗, 2.5.3∗ фигур 2.1∗…2.5∗, с воспроизведенными на экране монитора соответствующими им выбранными контрольными точками 2.1.1, 2.1.2, 2.1.3…2.5.1, 2.5.2, 2.5.3 материальных объектов 2.1…2.5 (Фиг.3).
Как вариант (не показано), для определения пространственного распределения напряженности электромагнитного поля геометрические фигуры 2.1∗…2.5∗ предварительно изображают на экране монитора вычислительного устройства 7 с помощью трехмерного графического редактора в произвольном масштабе. С помощью графического редактора трансформируют воспроизведенные на экране монитора геометрические фигуры 2.1∗…2.5∗, совмещая их контрольные точки 2.1.1∗, 2.1.2∗, 2.1.3∗…2.2.1∗, 2.5.2∗, 2.5.3∗ с отображениями воспроизведенных на экране монитора выбранных контрольных точек 2.1.1, 2.1.2, 2.1.3…2.5.1, 2.5.2, 2.5.3.
Датчиками 3 и 4 сканируют пространство, содержащее материальные объекты 2.1...2.5, и ультразвуковыми приемными модулями 5 с модулем управления 6 позиционируют их положение и фиксируют локальные значения напряженности электромагнитного поля в этих положениях.
По текущим координатам датчиков 3 и 4 и соответствующих им значениям напряженности электромагнитного поля вычисляют пространственное распределение этой напряженности, визуальное изображение которого воспроизводят на экране монитора вычислительного устройства 7.
Пространственное распределение напряженности электромагнитного поля определяют воспроизведением его относительно пространственного расположения трехмерных геометрических фигур 2.1∗…2.5∗, отображающих габаритные обводы моделируемых ими материальных объектов 2.1…2.5, совмещая полученные визуальные изображения на экране монитора вычислительного устройства 7 (Фиг.4). При этом математические описания пространственного распределения напряженности электромагнитного поля и геометрических трехмерных фигур 2.1∗…2.5∗ оказываются выраженными в общей системе координат. Общая система координат позволяет использовать полученные математические описания в последующих расчетах, например для оценки электромагнитной совместимости электрооборудования, электромагнитной безопасности, разработки систем компенсации электромагнитных полей и т.п.
В зависимости от эксплуатационных требований и методов математической обработки результатов измерений на мониторе вычислительного устройства 7 могут воспроизводиться и иные формы визуального отображения пространственного распределения напряженности электромагнитного поля. Например, как это принято в области экологических измерений, могут задаваться координаты точек отображения распределения величины напряженности электромагнитного поля на горизонтальных плоскостях, расположенных на высотах 0,5; 1,0 и 1,8 м.
Предложенный способ, за счет возможности моделирования распределения электромагнитного поля в пространстве, прилегающем к электрооборудованию, излучающему электромагнитные поля, позволяет рассчитывать электромагнитную обстановку в пространстве 1 для разработки мероприятий по обеспечению электромагнитной совместимости и по защите персонала от электромагнитных полей. В результате применения способа снижается стоимость и трудоемкость мероприятий по обеспечению электромагнитной совместимости электротехнического и высокочувствительного радиоэлектронного оборудования, а также экологической безопасности жилых, общественных, транспортных и производственных помещений. Использование в предложенном способе векторной графики для математического описания геометрических фигур, отображающих габаритные обводы материальных объектов в пространстве, не требует значительных вычислительных ресурсов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВЫЧИСЛЕНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ИНТЕГРАЛЬНОГО ПОКАЗАТЕЛЯ | 2017 |
|
RU2661749C1 |
| ОСНОВАННЫЙ НА ИНТЕРФЕРОМЕТРЕ САНЬЯКА РАСПРЕДЕЛЁННЫЙ ДАТЧИК РЕГИСТРАЦИИ ВИБРАЦИОННЫХ ВОЗДЕЙСТВИЙ С ПОВЫШЕННОЙ ТОЧНОСТЬЮ ОПРЕДЕЛЕНИЯ КООРДИНАТЫ ВОЗДЕЙСТВИЯ | 2020 |
|
RU2752686C1 |
| УСТРОЙСТВО ДЛЯ ЛИКВИДАЦИИ НЕГЕРМЕТИЧНОСТИ МАГНИТОПРОВОДНОЙ ОБОЛОЧКИ | 2012 |
|
RU2498147C2 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ НА ЭКРАНЕ ИНДИКАТОРА РАДИОЛОКАЦИОННОЙ СТАНЦИИ ТРЕХМЕРНОГО МНОГОЦВЕТНОГО ИЗОБРАЖЕНИЯ МОРСКИХ И БЕРЕГОВЫХ ЦЕЛЕЙ | 2002 |
|
RU2237260C2 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| Оптико-электронный комплекс для оптического обнаружения, сопровождения и распознавания наземных и воздушных объектов | 2019 |
|
RU2701177C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ ОБНАРУЖИТЕЛЬ ДВИЖУЩЕГОСЯ ПОДВОДНОГО ОБЪЕКТА | 2011 |
|
RU2474881C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ПОЛЕЙ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2215297C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ МОРСКОГО БАЗИРОВАНИЯ | 2016 |
|
RU2614864C9 |
| СИСТЕМА ТРАНСПОРТИРОВКИ ГРУЗА | 2022 |
|
RU2797077C1 |
Изобретение относится к измерительной технике и предназначено для решения задач электромагнитной совместимости и экологической безопасности электротехнического и радиоэлектронного оборудования промышленных, транспортных, общественных и бытовых объектов. На габаритных обводах материальных объектов, содержащихся в пространстве, выбирают контрольные точки. Поочередно устанавливая датчик пространственного положения в этих контрольных точках, определяют их координаты и воспроизводят на экране монитора. После чего на экране монитора вычислительного устройства с помощью трехмерного графического редактора воспроизводят трехмерные геометрические фигуры, отображающие габаритные обводы материальных объектов, с контрольными точками, совмещенными с воспроизведенными на экране монитора выбранными контрольными точками материальных объектов. Датчиком пространственного положения сканируют пространство, содержащее материальные объекты, в том числе излучающее поле электрооборудование. Датчиком напряженности электромагнитного поля, совмещенным с указанным датчиком пространственного положения, фиксируют локальные значения напряженности электромагнитного поля. При этом пространственное распределение напряженности электромагнитного поля определяют воспроизведением его относительно пространственного расположения трехмерных фигур, отображающих габаритные обводы моделируемых ими материальных объектов. Предложение обеспечивает снижение стоимости и трудоемкости мероприятий по обеспечению электромагнитной совместимости электротехнического и высокочувствительного радиоэлектронного оборудования, а также экологической безопасности жилых, общественных, транспортных и производственных помещений. Технический результат заключается в снижении трудоемкости и упрощении моделирования пространственного распределения напряженности электромагнитного поля с привязкой его характеристик к координатам пространственных объемов сложной формы, укомплектованных электрооборудованием, излучающим электромагнитные поля. 4 ил.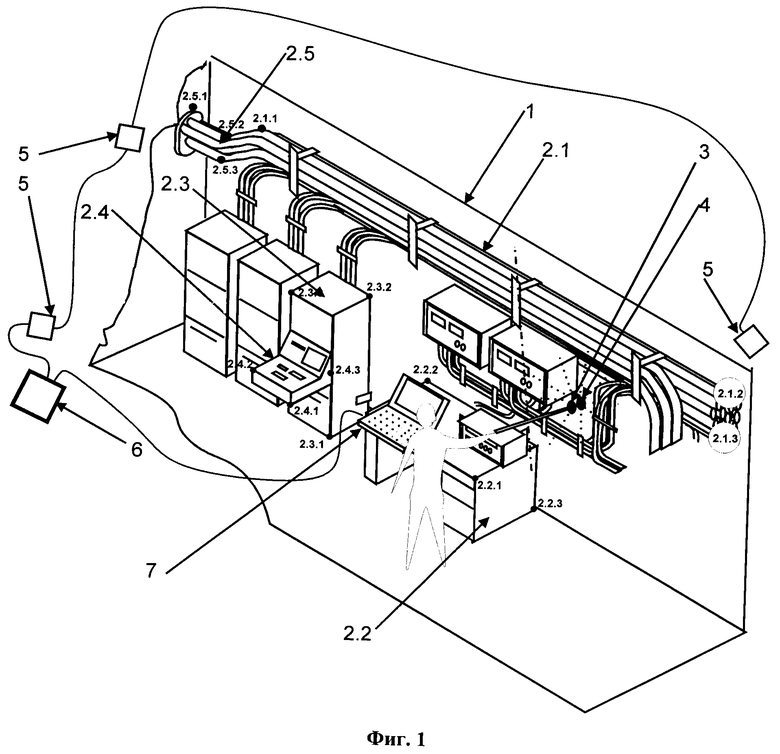
Способ определения пространственного распределения напряженности электромагнитного поля, при котором датчиком пространственного положения сканируют пространство, содержащее материальные объекты, в том числе электрооборудование, излучающее электромагнитное поле, при этом датчиком напряженности электромагнитного поля, скрепленным с указанным датчиком пространственного положения, фиксируют локальные значения напряженности электромагнитного поля, по текущим координатам датчиков и соответствующим им значениям напряженности электромагнитного поля вычисляют пространственное распределение поля, которое воспроизводят на экране монитора вычислительного устройства, отличающийся тем, что на габаритных обводах материальных объектов, содержащихся в пространстве, выбирают контрольные точки, затем определяют их координаты, поочередно устанавливая датчик пространственного положения в этих контрольных точках, и воспроизводят их на экране монитора вычислительного устройства, после чего на экране монитора вычислительного устройства воспроизводят трехмерные геометрические фигуры, отображающие габаритные обводы материальных объектов с контрольными точками, совмещенными с воспроизведенными на экране монитора выбранными контрольными точками материальных объектов, а пространственное распределение напряженности электромагнитного поля определяют воспроизведением его относительно пространственного расположения трехмерных фигур, отображающих габаритные обводы моделируемых ими материальных объектов.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ПОЛЕЙ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2215297C2 |
| СПОСОБ ПОЛУЧЕНИЯ ОПТИЧЕСКОГО ИЗОБРАЖЕНИЯ МАГНИТНОГО ПОЛЯ | 1995 |
|
RU2118832C1 |
| СПОСОБ УКРЕПЛЕНИЯ ЗДОРОВЬЯ ЧЕЛОВЕКА | 2004 |
|
RU2264802C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВНУТРЕННИХ ВОЛН ГИДРОДИНАМИЧЕСКИХ ПОДВОДНЫХ ВОЗМУЩЕНИЙ | 1997 |
|
RU2134433C1 |

