Предлагаемое устройство самонаведения относится к навигационной технике и предназначено, главным образом, для решения проблем самонаведения методом параллельного сближения кратковременно взаимодействующих малоразмерных летательных аппаратов.
Проблема управления взаимным перемещением в пространстве объектов возникает во многих практических случаях. Так, например, процесс самонаведения методом параллельного сближения часто необходим на заключительных стадиях управления движением кратковременно взаимодействующих объектов при встрече авиационно-космических объектов с целью стыковки, аварийной помощи, управления механизмом самого объекта для достижения конечной цели - приведения в рабочее состояние стыковочных устройств, выдачи команд в систему телеметрии и т.п. (см. Коган И.М. Ближняя радиолокация. Теоретические основы. М.: Сов. Радио, 1973, 272 с.).
Несмотря на то что поиски путей возможного самонаведения малоразмерных беспилотных летательных аппаратов, таких как, например, боеприпасы (ракеты) класса «земля-воздух», «воздух-воздух» и др., ведутся уже десятилетиями еще со времен начала их разработок, тем не менее, до настоящего времени проблема создания устройства их самонаведения методом параллельного сближения не решена (см. Локк А.С. Управление снарядами. Перевод с англ. М.: Гос. изд. ФМЛ, 1958, 775 с.).
Известны различные устройства самонаведения, использующие решение поставленной задачи управления траекторией полета летательных аппаратов методом параллельного сближения, описанные в литературе:
1) Л.С.Гуткин, Ю.П.Борисов, А.А.Валуев и др. Радиоуправление реактивными снарядами и космическими аппаратами./Под общ. ред. Л.С.Гуткина. М.: Сов. радио. 1968, 680 с. (с.116).
2) Максимов М. В., Горгонов Г. И. Радиоуправление ракетами. Сов. радио. М.: 1964, 644 с.
3) Волковский С.А., Оноприенко Е.И., Савинов В.А. Радиоустройства систем управления летательными аппаратами. М.: Машиностроение, 1972, 408 с.
4) Березин Л.В., Вейцель В.А., Волковский С.А. и др. Основы радиоуправления. Учебное пособие для вузов./Под ред. В.А. Вейцеля, В.Н. Типугина. М.: Сов. Радио, 1973, 464 с.
5) Патент №1301041 (Англия). Устройство самонаведения. МКИ F41G.
6) Патент №2325897 (Франция). Система наведения ракет. Заявл. 24.09.75, опубл. 27.05.77. МКИ F41G; и другие.
Из известных наиболее близким по технической сущности является устройство самонаведения, описанное в литературе:
1. Л.С.Гуткин, Ю.П.Борисов, А.А.Валуев и др. Радиоуправление реактивными снарядами и космическими аппаратами./Под общ. ред. Л.С.Гуткина. М.: Сов. Радио, 1968, 680 с. (с.116) (прототип).
Такое устройство самонаведения содержит: антенну, радиолокатор, таймер, гироскоп, стабилизированную платформу, мотор начальной установки, угломерный радиодатчик и устройство управления. В таком устройстве самонаведения по сообщению командного пункта мотор начальной установки устанавливает антенну на стабилизированной платформе таким образом, что ось ее равносигнальной зоны совпадает с направлением на цель. В начальном процессе самонаведения радиолокатор по команде, поступившей с таймера, совместно с гироскопом измеряет угол отклонения направления на цель от направления равносигнальной зоны антенны. Сигнал ошибки с выхода радиолокатора поступает на устройство управления, корректирующее траекторию движения ракеты.
Однако такая относительно сложная и громоздкая система практически не может быть реализована в малоразмерных устройствах, к которым относятся и боеприпасы ограниченных объемов. Следовательно, возникает главная проблема создания устройства самонаведения методом параллельного сближения боеприпасов ограниченных объемов.
Техническим результатом реализации предлагаемого устройства самонаведения является упрощение конструкции и расширение возможности управления кинематикой движения боеприпасов ограниченных объемов методом параллельного сближения.
Технический результат достигается тем, что для упрощения конструкции и расширения возможности управления кинематикой движения боеприпасов ограниченных объемов методом параллельного сближения устройство, содержащее антенну, радиолокатор, таймер и устройство управления, отличается тем, что оно снабжено двумя блоками вычисления, электронным ключом, двумя блоками памяти и логическим устройством, при этом антенна соединена с первым входом радиолокатора, выход которого соединен с первым входом первого блока вычисления и входом первого блока памяти, выход первого блока вычисления соединен с первым входом второго блока вычисления и с последовательно соединенными электронным ключом и вторым блоком памяти, выход которого соединен со вторым входом второго блока вычисления, выход которого через первый вход логического устройства соединен с входом устройства управления, причем на второй вход логического устройства подан сигнал нормированной единицы, причем выход устройства управления является выходом устройства самонаведения, а радиолокатор, второй вход которого соединен с выходом таймера, выполнен с возможностью измерения дальности до цели или скорости сближения с ней.
На фиг.1 представлена структурная схема предлагаемого устройства самонаведения, на котором обозначено
1 - антенна,
2 - радиолокатор,
3 - первый блок памяти,
4 - первый блок вычисления,
5 - электронный ключ,
6 - второй блок памяти,
7 - второй блок вычисления,
8 - логическое устройство,
9 - устройство управления,
10 - таймер.
Предлагаемое устройство самонаведения содержит антенну 1, радиолокатор 2, первый блок памяти 3, первый блок вычисления 4, электронный ключ 5, второй блок памяти 6, второй блок вычисления 7, логическое устройство 8, устройство управления 9, таймер 10 таким образом, что антенна 1 соединена с первым входом радиолокатора 2, выход которого соединен с первым входом первого блока вычисления 4 и входом первого блока памяти 3, выход первого блока вычисления 4 соединен с первым входом второго блока вычисления 7 и с последовательно соединенными электронным ключом 5 и вторым блоком памяти 6, выход которого соединен со вторым входом второго блока вычисления 7, выход которого через первый вход логического устройства 8 соединен со входом устройства управления 9, на второй вход логического устройства 8 подается нормированный сигнал единицы, а выход устройства управления является выходом всего устройства, причем радиолокатор 2, второй вход которого соединен с выходом таймера 10, может являться измерителем дальности или скорости сближения.
В предлагаемом устройстве самонаведения радиолокатор 2 может выполнять одну из двух функций: либо измерять дальность (тогда радиолокатор 2 является дальномером), либо измерять скорость сближения (тогда радиолокатор 2 является измерителем скорости сближения по оценке доплеровской частоты).
Начало работы предлагаемого устройства самонаведения задается таймером 10 по команде «пуск» (фиг.1) (эта команда может быть подана, например, при выстреле боеприпаса). В качестве таймера 10 может быть использован, например, входящий в состав радиовзрывателя ПИМ (предохранительно-исполнительный механизм) с часовым механизмом (см. Дорофеев А.Н. Взрыватели ракет. М.: Военное изд. МО СССР, 1963, 86 с. и др.).
Рассмотрим работу предлагаемого устройства самонаведения.
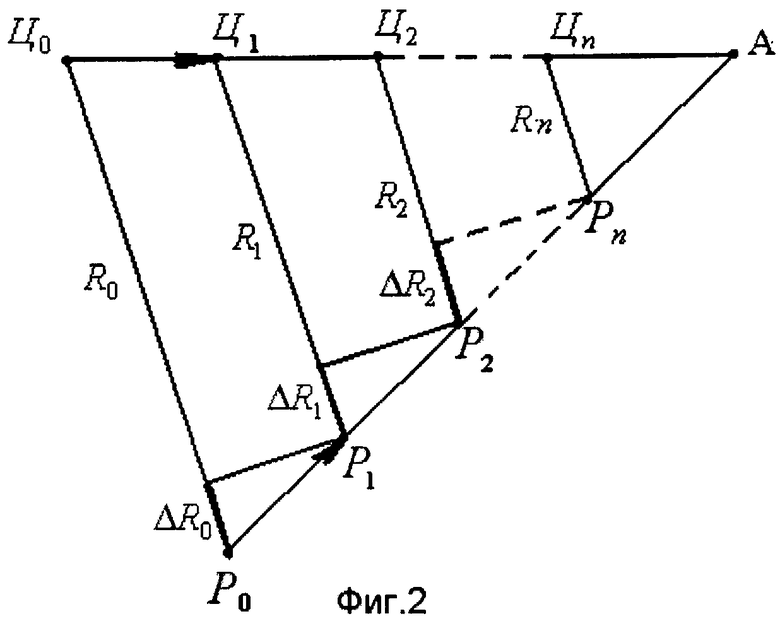
Известно (см. Л.С.Гуткин, Ю.П.Борисов, А.А.Валуев и др. Радиоуправление реактивными снарядами и космическими аппаратами./Под общ. ред. Л.С.Гуткина. М.: Сов. Радио, 1968, 680 с. и др.), что метод параллельного самонаведения боеприпаса (например, ракеты) на цель заключается в том, что вектор скорости движения ракеты (Р) в каждый момент времени направлен в упрежденную точку (А), положение которой соответствует этому моменту времени (фиг.2).
На фиг.2 представлена картина взаимодействия боеприпаса (Р) и цели (Ц) в меридиональной плоскости (вдоль строительной оси боеприпаса) при самонаведении по методу параллельного сближения. При таком самонаведении вектор направления «боеприпас-цель» (РЦ) сохраняет в пространстве постоянное направление, т.е. перемещается параллельно самому себе, а измеряемое расстояние боеприпас-цель (РЦ) за одинаковое дискретное время Δt, изменяется на некоторую постоянную величину ΔR.
Совокупность геометрических точек, характеризующих положение цели в экваториальной плоскости (плоскости, перпендикулярной оси боеприпаса), образует вид спиральной линии (фиг.3) с центром в точке расположения боеприпаса (в точке Р). Такая форма возможного положения цели в экваториальной плоскости подтверждает возможность практической реализации метода параллельного сближения при любом пространственном взаимодействии боеприпаса и цели, что позволяет рассматривать их взаимодействие в одной, например, меридиональной плоскости, не нарушая общности принципа (см. 1) Патент №1301041 (Англия). Устройство самонаведения. МКИ F41G; 2) Патент №2325897 (Франция). Система наведения ракет. Заявл.24.09.75, опубл. 27.05.77, МКИ F41G).
Таким образом, при самонаведении методом параллельного сближения линия визирования (вектор расстояния РЦ=R) между боеприпасом и наблюдаемой целью при каждом текущем измерении перемещается параллельно самой себе, так что  и при этом угловая скорость перемещения равна нулю. Если при самонаведении это условие соблюдается, тогда согласно теореме Фалеса (см. Алтынов П.И., Баврин И.И., Бойченко Е.М. Математика. Большой справочник. М.: Изд. Дрофа, 2004, 848 с.) имеем:
и при этом угловая скорость перемещения равна нулю. Если при самонаведении это условие соблюдается, тогда согласно теореме Фалеса (см. Алтынов П.И., Баврин И.И., Бойченко Е.М. Математика. Большой справочник. М.: Изд. Дрофа, 2004, 848 с.) имеем:
 откуда
откуда 
где Ц1Ц2 - расстояние между отдельными точками Ц1 и Ц2 траектории движения воздушной цели;
Р1Р2 - расстояние между отдельными точками Р1 и Р2 траектории движения боеприпаса.
Принимается, что для достаточно малых значений времени Δt во время самонаведения значения скоростей цели и боеприпаса остаются постоянными Vц=const и Vp=const, а измерение расстояний R1, R2, R3, …, Rn производится дискретно через равные промежутки времени Δt.
Тогда при этих условиях расстояния, например Ц1Ц2 и Р1Р2, будут соответственно равны Ц1Ц2=VцΔt и Р1Р2=VрΔt, откуда
 .
.
Из последнего выражения следует, что при постоянстве скоростей сближения ракеты Vp=const и цели Vц=const имеет место постоянство величин отношений как измеряемых дальностей
 ,
,
так и скоростей сближения
 .
.
При постоянстве скоростей ракеты и цели, естественно, будет постоянной величиной и их результирующая скорость Vрц.
Тогда имеем
 ,
,
где  ,
,
Vсбл - радиальная составляющая вектора скорости Vрц.
Тогда значение αV определяется по соотношению
 .
.
Таким образом, в предлагаемом устройстве самонаведения параметром рассогласования может быть выбрана одна из двух величин: либо дальномерная αR, либо скоростная αV.
Дальномерный параметр рассогласования αR, характеризует собой числовое значение отношения значений Ri измеренного расстояния между боеприпасом и целью в текущий момент времени ti и Ri-1 - измеренное расстояние между боеприпасом и целью в предшествующий момент времени ti-1, и определяется выражением  .
.
Параметр рассогласования по скорости сближения αV характеризует собой числовое значение отношения значений измеренных скоростей сближения боеприпаса с целью Vсбл.i в текущий момент времени ti и в предшествующий ti-1 текущему моменту времени Vсбл.i-1.
Тогда параметр рассогласования αV скорости сближения в общем виде определяется выражением
 .
.
Принимаем, что воздушная цель (Ц), имея сосредоточенный характер (см. Коган И.М. Ближняя радиолокация. Теоретические основы. М.: Сов. радио, 1973, 272 с.). движется со скоростью Vц, а боеприпас движется со скоростью Vp. Тогда, как отмечалось ранее, при стрельбе и точном наведении боеприпаса по методу параллельного сближения происходит контактная встреча боеприпаса с целью в некоторой упрежденной точке А (фиг.2) (или, по крайней мере, может произойти их встреча в некоторой области пространства вокруг этой точки А с допустимым минимальным радиусом дальности).
Дальнейшую работу предлагаемого устройства самонаведения (фиг.1) рассмотрим в двух вариантах: при измерении радиолокатором 2 дальности R и при измерении радиолокатором 2 скорости сближения Vсбл.
Рассмотрим вариант 1.
Радиолокатор 2 является измерителем дальности (дальномером).
В начальный момент времени t0 по внешней команде «пуск» (например, по команде от временного предохранительно-исполнительного устройства радиовзрывателя) от таймера 10 происходит измерение расстояния R0 между боеприпасом и целью радиолокатором 2. Данные этого первого измерения записывается в первом блоке памяти 3. В следующий момент времени t1 радиолокатор 2 так же измеряет расстояние между боеприпасом и целью R1, значение которого поступает как в первый блок вычисления 4, так и одновременно записывается в первом блоке памяти 3, вытесняя из него значение предыдущего расстояния R0, которое в свою очередь поступает на второй вход первого блока вычисления 4 и в котором производится вычисление отношения  .
.
Затем сигналом из первого блока вычисления 4 включается электронный ключ 5 и через него значение α1 из выхода первого блока вычисления 4 поступает на запись во второй блок памяти 6, после чего электронный ключ 5 выключается и в дальнейшей работе устройства не участвует. В последующий момент времени t2 радиолокатор 2 измеряет расстояние между боеприпасом и целью R2, которое поступает в первый блок вычисления 4, в котором определяется отношение измеренных предшествующей R1 и текущей R2 дальностей  , которое затем поступает во второй блок вычисления 7, куда из блока памяти 6 подается хранимое значение α1. Во втором блоке вычисления 7 определяется отношение
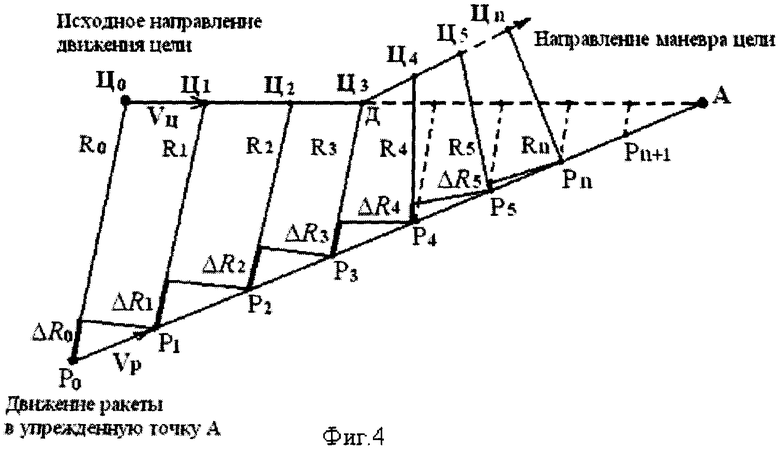
, которое затем поступает во второй блок вычисления 7, куда из блока памяти 6 подается хранимое значение α1. Во втором блоке вычисления 7 определяется отношение  , которое поступает в логическое устройство 8, в котором происходит сравнение величины bi с сигналом нормированной единицы «1». С выхода логического устройства 8 сигнал поступает на вход устройства управления 9, которое в зависимости от значений величин bi>1 или bi<1 подает соответствующую команду на исполнительные органы управления движением боеприпаса (например, «влево» или «направо»). Такая команда подается при маневре цели либо боеприпаса, т.е. при взаимном изменении траектории полета, при котором нарушаются условия метода самонаведения. При этом линии визирования ЦР начиная с момента маневра, например, когда маневрирующая цель находится в точке Д (фиг.4), не будут отличаться между собой на ранее определенную постоянную величину ΔR
, которое поступает в логическое устройство 8, в котором происходит сравнение величины bi с сигналом нормированной единицы «1». С выхода логического устройства 8 сигнал поступает на вход устройства управления 9, которое в зависимости от значений величин bi>1 или bi<1 подает соответствующую команду на исполнительные органы управления движением боеприпаса (например, «влево» или «направо»). Такая команда подается при маневре цели либо боеприпаса, т.е. при взаимном изменении траектории полета, при котором нарушаются условия метода самонаведения. При этом линии визирования ЦР начиная с момента маневра, например, когда маневрирующая цель находится в точке Д (фиг.4), не будут отличаться между собой на ранее определенную постоянную величину ΔR

т.е. появляется неравенство

и при этом линии визирования ЦР между собой будут не параллельны:
 .
.
Таким образом, в дальномерном варианте радиолокатора 2 параметром рассогласования является величина αR, характеризующая собой числовое значение отношения величины измеренного текущего расстояния Ri к значению расстояния предшествующего измерения Ri-1
 .
.
Абсолютная ошибка системы самонаведения при измерении дальности, обусловленная изменением траектории движения цели или боеприпаса, будет  , а относительная ошибка будет
, а относительная ошибка будет  .
.
При безошибочном самонаведении боеприпаса по методу параллельного сближения δR=0 и Z=1.
На фиг.4 показано, что если изменение траектории движения цели произошло, например, в точке Д, то при неизменной траектории движения боеприпаса (Р) относительная ошибка, начиная с этой точки (Д) не равна единице, т.е.  , так как R4>R3 и ΔR4≠ΔR3,
, так как R4>R3 и ΔR4≠ΔR3,
что и регистрируется логическим устройством (8), с которого подается сигнал рассогласования измеряемых величин на устройство управления движением боеприпаса (9). Следовательно, при измерении неравных дальностей R имеем, например, R3-R4≠R2-R3, т.e. ΔRi-1≠ΔRi, в результате чего подается команда с логического устройства (8) на устройство управления (9), изменяющая траекторию движения боеприпаса таким образом, чтобы обеспечивалось условие самонаведения по методу параллельного сближения, т.е. ΔRi-1=ΔRi.
Следовательно, величины δR и Z, характеризующие ошибку траекторного наведения в i-й точке траектории, могут быть значениями, необходимыми для управления системой самонаведения. Знаки «+» или «-» при δR и величины 1<Z>1 характеризуют направление фактической траектории движения боеприпаса и цели по отношению к траектории при безошибочном (точном) наведении.
Рассмотрим вариант 2.
Радиолокатор 2 является измерителем скорости сближения (измерителем доплеровских частот).
Ранее установлено, что в качестве параметра рассогласования при самонаведении боеприпаса по методу параллельного сближения может быть скорость сближения объектов Vсбл, определяемая радиолокатором 2 через оценку частоты Доплера.
С учетом длины волны λ излучаемого сигнала радиолокатором 2 скорость сближения объектов Vсбл является величиной, прямопропорциональной доплеровской частоте (см. Коган И.М. Ближняя радиолокация. Теоретические основы. М.: Сов. радио, 1973, 272 с.), так что
 , откуда
, откуда  .
.
Поэтому в предлагаемом устройстве самонаведения оценка скорости сближения, являющейся параметром рассогласования, может сводиться к определению радиолокатором 2 частоты Доплера Fд.
При самонаведении по методу параллельного сближения и постоянстве скоростей как цели (Vц=const), так и боеприпаса (Vp=const) за равные промежутки времени Δt цель и боеприпас соответственно проходят путь:
 P0P1=PiPi-1=VpΔt,
P0P1=PiPi-1=VpΔt,
где i=0, 1, 2, … n, а линии визирования Ц0Ц1=Ц0Цi-1=VцΔt (фиг.5) в любые моменты времени от начала самонаведения t0 до момента встречи боеприпаса с целью будут между собой параллельны, т.е  .
.
Как видно из фиг.5 и фиг.6, скорость сближения боеприпаса с целью Vсбл определяется углом визирования β0 и суммарной скоростью «боеприпас-цель» Vрц. Если соблюдается условие постоянства скоростей движения боеприпаса и цели, тогда радиальная составляющая суммарной скорости «боеприпас-цель» Vсбл является постоянной величиной в каждой i-й точке траектории Vсбл=Vрцcosβ0=const, так как значения углов β0 между линией визирования на цель и на упрежденную точку А при всех измерениях будут равны, т.е. β0=β1=…=βn. Поэтому при самонаведении методом параллельного сближения доплеровская частота Fдi в каждой точке траектории движения боеприпаса также будет постоянной и равной

При маневре цели или боеприпаса угол визирования β0 изменяется, например, до значения βγ (фиг.6), что приведет к изменению, во-первых, результирующей скорости ракета-цель Vрц, и, во-вторых, изменится значение радиальной составляющей этой измененной скорости Vсбл, что в конечном счете приведет к изменению частоты Доплера F' дi+1.
В этом случае величина ΔFд=Fдi-F' дi+1 является мерой рассогласования траектории движения боеприпаса, самонаводящегося по методу параллельного сближения. Тогда сигнал на выходе радиолокатора 2 характеризуется частотой Доплера. Знак «+» или
«-» при ΔFд соответствует направлению изменения траектории движения боеприпаса.
В дальнейшем при выполнении радиолокатором 2 функций измерителя доплеровских частот работа предлагаемого устройства (фиг.1) аналогична той, которая изложена ранее, при рассмотрении измерений радиолокатором 2 дальностей.
Рассмотренные выше два варианта работы устройства самонаведения, при которых радиолокатор 2 (фиг.1) выполняет функции дальномера или измерителя скорости сближения, свидетельствуют о том, что при использовании радиолокатора 2 в качестве дальномера или частотомера доплеровских частот функциональная работа предлагаемого устройства самонаведения в целом будет одинаковой, имея в виду, что на выходе радиолокатора 2 параметром рассогласования в дальномерном варианте является параметр дальности между боеприпасом и целью, а в частотном варианте - скорость сближения между ними.
Предлагаемое устройство самонаведения методом параллельного сближения отличается от известного простотой технической реализации управления движением боеприпаса ограниченного объема.
В боеприпасах ограниченных объемов широко применяются радиовзрыватели (см. 1) Гуткин Л.С., Борисов Ю.П., Валуев А.А. и др. Радиоуправление реактивными снарядами и космическими аппаратами./Под общ. ред. Л.С.Гуткина. М.: Сов. Радио, 1968, 680 с.; 2) Дорофеев А.Н. Взрыватели ракет. М.: Военное изд. МО СССР, 1963, 86 с.), поэтому в предлагаемом устройстве самонаведения в качестве радиолокатора 2 для оценки параметра рассогласования (дальности или скорости сближения) может быть использован радиотракт радиовзрывателя боеприпаса. Использованием, например, радиотракта импульсного или частотного радиовзрывателя радиолокатор 2 (фиг.1) может быть реализован как дальномер, а при использовании, например, радиотракта автодинного радиовзрывателя радиолокатор 2 (фиг.1) может быть реализован как измеритель скорости сближения через измерения доплеровских частот. Кроме того, применительно к боеприпасам предлагаемое устройство самонаведения позволяет использовать радиовзрыватель боеприпаса путем использования и других его элементов, таких как приемо-передающую антенна и предохранительно-исполнительный механизм (в качестве таймера).
Кроме перечисленных, остальные элементы предлагаемого устройства самонаведения могут быть реализованы известными и широко применяемыми в электронных устройствах аналоговыми элементами и интегральными микросхемами (см. Интегральные микросхемы. Справочник./Под общей ред. Б.В. Тарабрина. М.: Изд. Сов. радио, 1984).
Введением предлагаемых элементов и связей между ними принципиально по-новому решается проблема создания устройства самонаведения летательных аппаратов ограниченных объемов.
Изготовленный макет предлагаемого устройства самонаведения применительно к реальному боеприпасу ограниченного объема класса «земля-воздух», испытанный как в лабораторных, так и в натурных полигонных условиях, показал его работоспособность при различных и случайных маневрах воздушной цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО САМОНАВЕДЕНИЯ | 2011 |
|
RU2466344C1 |
| СИСТЕМА САМОНАВЕДЕНИЯ НА ЦЕЛЬ МАЛОРАЗМЕРНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2539824C1 |
| СПОСОБ САМОНАВЕДЕНИЯ МАЛОРАЗМЕРНЫХ РАКЕТ НА ЦЕЛЬ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2539823C1 |
| Способ обнаружения цели с помощью радиовзрывателя ракеты | 2019 |
|
RU2722904C1 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2332634C1 |
| БОЕПРИПАС С САМОУПРАВЛЯЕМЫМ ПОЛЕМ ПОРАЖЕНИЯ | 2008 |
|
RU2402742C2 |
| СПОСОБ ВЫВОДА РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2542691C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ ПРИ НАВЕДЕНИИ НА ЦЕЛЬ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2311605C2 |
| Способ идентификации цели с помощью радиовзрывателя ракеты с головкой самонаведения | 2019 |
|
RU2722903C1 |



Изобретение относится к навигационной технике и предназначено, главным образом, для решения проблем самонаведения методом параллельного сближения кратковременно взаимодействующих малоразмерных летательных аппаратов. Техническим результатом реализации предлагаемого устройства самонаведения является упрощение конструкции и расширение возможности управления кинематикой движения методом параллельного сближения. Устройство содержит антенну, радиолокатор, таймер и устройство управления. Введены два блока вычисления, электронный ключ, два блока памяти, логическое устройство и устройство управления. При этом антенна соединена с первым входом радиолокатора, выход которого соединен с первыми входами первого блока вычисления и первого блока памяти. Выход первого блока вычисления соединен с первым входом второго блока вычисления и с последовательно соединенными электронным ключом и вторым блоком памяти, выход которого соединен со вторым входом второго блока вычисления, выход которого через первый вход логического устройства соединен с входом устройства управления. На второй вход логического устройства подается нормированный сигнал единицы, а выход устройства управления является выходом всего устройства, причем радиолокатор, второй вход которого соединен с выходом таймера, может являться дальномером или измерителем доплеровской частоты. 6 ил.
Устройство самонаведения боеприпаса на цель методом параллельного сближения, содержащее антенну, радиолокатор, таймер и устройство управления, отличающееся тем, что оно снабжено двумя блоками вычисления, электронным ключом, двумя блоками памяти и логическим устройством, при этом антенна соединена с первым входом радиолокатора, выход которого соединен с первым входом первого блока вычисления и входом первого блока памяти, выход первого блока вычисления соединен с первым входом второго блока вычисления и с последовательно соединенными электронным ключом и вторым блоком памяти, выход которого соединен со вторым входом второго блока вычисления, выход которого через первый вход логического устройства соединен с входом устройства управления, причем на второй вход логического устройства подан сигнал нормированной единицы, причем выход устройства управления является выходом устройства самонаведения, а радиолокатор, второй вход которого соединен с выходом таймера, выполнен с возможностью измерения дальности до цели или скорости сближения с ней.
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ НАВЕДЕНИИ НА ВОЗДУШНУЮ ЦЕЛЬ | 1999 |
|
RU2189556C2 |
| СПОСОБ ПОЛУЧЕНИЯ ЗАМУТНЁННОГО НАПИТКА | 2002 |
|
RU2207785C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РАКЕТОЙ КЛАССА "ВОЗДУХ-ВОЗДУХ" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2099665C1 |
| СПОСОБ СУШКИ МАКАРОННЫХ ИЗДЕЛИЙ | 1973 |
|
SU436215A1 |
| СПОСОБ ПРОИЗВОДСТВА ДЕСЕРТА | 2013 |
|
RU2517818C1 |

