Предлагаемое изобретение относится к оптическому приборостроению и может быть использовано для астроориентации, астрокоррекции и астронавигации космических аппаратов и авиационной техники (далее летательных аппаратов).
Известен углоизмерительный звездный прибор, содержащий объектив, в фокальной плоскости которого располагается фотоприемное устройство, вычислительный блок и канал геометрического эталона (Патент РФ №2442109, МПК G01C 21/24, опубликован 10.02.2012 г.). Прибор имеет широкое неподвижное угловое поле (несколько сотен квадратных градусов) и, благодаря этому, простую конструкцию при высокой точности визирования (погрешность не превышает 25′′).
Недостатком данного прибора является высокая чувствительность к световым помехам, вызванным отражением солнечного излучения от элементов конструкции летательного аппарата, влиянием продуктов сгорания двигательных установок, пыли и т.д., что снижает точность и надежность работы прибора.
Наиболее близким к предлагаемому изобретению по наибольшему количеству совпадающих признаков является астровизирующий прибор с подвижным угловым полем (см. В.И. Федосеев и др. Оптико-электронные приборы ориентации и навигации космических аппаратов. Москва, Логос, 2007 г., стр.142-150).
Астровизирующий прибор содержит входную оптическую систему с объективом, в фокальной плоскости которого установлен приемник излучения, размещенные на внутренней рамке подвеса, а также внешнюю рамку подвеса, и блок обработки информации, первый вход которого подключен к выходу, а первый управляющий выход - к управляющему входу приемника излучения, при этом внутренняя и внешняя рамки подвеса снабжены приводами, входы которых подключены соответственно ко второму и третьему управляющим выходам блока обработки информации, и измерителями угла поворота. Прибор может изменять положение углового поля относительно базы прибора, т.е. наводиться на произвольную заданную звезду, благодаря чему угловое поле может быть достаточно узким (единицы квадратных градусов), что обеспечивает высокую помехозащищенность по отношению к световым потокам всех видов.
Управление наведением на заданную звезду и удержанием ее в поле зрения объектива осуществляется электронным блоком обработки. При этом системы слежения, обеспечивающие слежение за положением оси объектива, подстройку положения электронного растра приемника излучения и т.д., работают последовательно (см. В.И. Федосеев и др., Оптико-электронные приборы ориентации и навигации космических аппаратов. Москва, Логос, 2007 г., стр.150), что занимает много времени, но в данном приборе не оказывает существенного влияния на результирующую погрешность астровизирования всего прибора в целом, составляющую величину порядка 5′, основная доля которой обусловлена использованием шаговых двигателей, измерителей угла поворота с разрешением в 80′′, приемников-диссекторов.
Для достижения астровизирующим прибором с подвижным угловым полем точности, соизмеримой с точностью углоизмерительного звездного прибора с неподвижным полем по патенту РФ №2442109, погрешность которого не превышает 25′′, необходимо использовать устройства более совершенные и, соответственно, требующие в процессе работы с ними приема, выдачи и обработки гораздо большего, по сравнению с прототипом, объема информации. Последовательное решение всех возникающих в процессе обработки информации задач приведет в итоге к большой продолжительности измерения углового положения заданной звезды. При больших скоростях движения (эволюции) летательного аппарата и соответствующей скорости изменения углового положения наблюдаемых звезд, при высокой скорости изменения положения прибора это приведет к значительной погрешности астровизирования за счет длительной обработки большого объема информации.
Целью предлагаемого изобретения является повышение точности угловых измерений астровизирующего прибора за счет увеличения скорости обработки информации при использовании высокоточных высокоинформативных устройств.
Указанная цель достигается тем, что в астровизирующем приборе, содержащем входную оптическую систему с объективом, в фокальной плоскости которого установлен приемник излучения, размещенные на внутренней рамке подвеса, а также внешнюю рамку подвеса и блок обработки информации, первый вход которого подключен к выходу, а первый управляющий выход - к управляющему входу приемника излучения, при этом внутренняя и внешняя рамки подвеса снабжены приводами, входы которых подключены соответственно ко второму и третьему управляющим выходам блока обработки информации, и измерителями угла поворота, блок обработки информации выполнен в виде многопроцессорного устройства управления, первый и второй многоканальные входы которого подключены соответственно к N-канальному выходу измерителя угла поворота внутренней рамки подвеса и М-канальному выходу измерителя угла поворота внешней рамки подвеса, при этом число каналов N≥1, М≥1 и равно количеству преобразователей угол-код, установленных в соответствующем измерителе угла поворота.
А также тем, что блок обработки информации содержит первое устройство интерфейса, первые вход и выход которого являются соответственно первым входом и первым управляющим выходом блока обработки информации, а вторые вход и выход подключены соответственно к первым выходу и входу первого процессора, вторые вход и выход которого соединены соответственно с первыми выходом и входом второго процессора, вторые вход и выход которого подключены соответственно к первым выходу и входу третьего процессора, второе устройство интерфейса, первые вход и выход которого подключены соответственно к третьему выходу и третьему входу второго процессора, а вторые вход и выход являются соответственно вторым входом и четвертым выходом блока обработки информации, третье устройство интерфейса, N входов которого являются первым многоканальным входом блока обработки информации, а следующие М входов являются его вторым многоканальным входом, первый выход третьего устройства интерфейса подключен к четвертому входу второго процессора, а второй выход - ко второму входу третьего процессора, второй выход которого подключен к входу устройства управления приводами, первый и второй выход которого являются соответственно вторым и третьим управляющими выходами блока обработки информации.
А также тем, что приводы внутренней и внешней рамок подвеса выполнены на бесконтактных индукционных моментных электродвигателях.
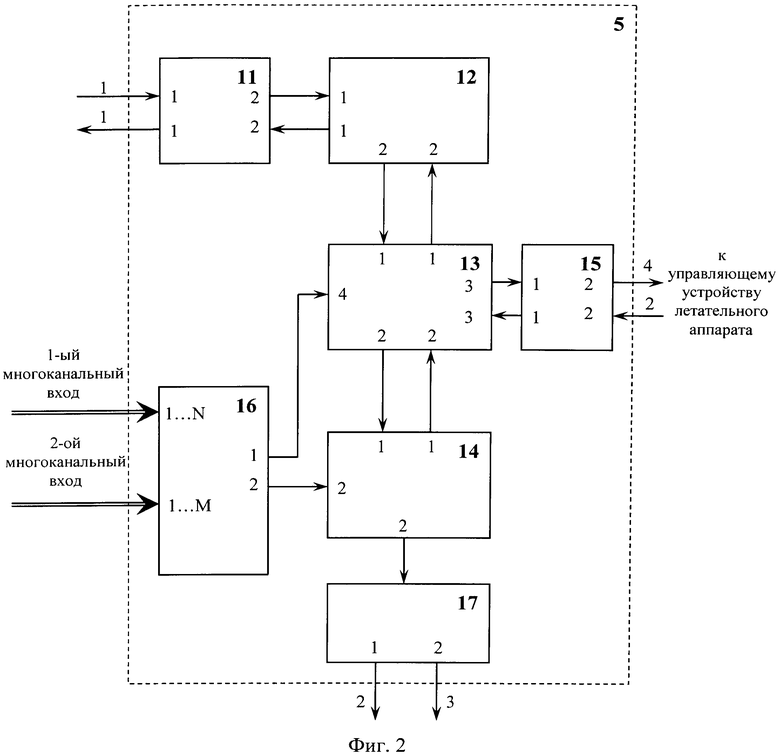
На фиг.1 представлена функциональная схема астровизирующего прибора.
На фиг.2 представлена функциональная схема блока обработки информации.
Астровизирующий прибор содержит входную оптическую систему 1 с объективом 2, в фокальной плоскости которого установлен приемник излучения 3, в качестве которого может быть использован, например, высокоскоростной матричный приемник CMV-4000 с числом пикселей матрицы 2048×2048, размещенные на внутренней рамке 4 подвеса, и блок обработки информации 5, первый вход которого подключен к выходу, а первый управляющий выход - к управляющему входу приемника излучения 3, при этом внутренняя рамка 4 и внешняя рамка 6 подвеса снабжены приводами 7 и 8, в качестве которых могут быть использованы, например, бесконтактные индукционные моментные электродвигатели типа МД с электромагнитной редукцией частоты вращения ротора и возбуждением от высокоэрцетивных постоянных магнитов, входы приводов 7 и 8 подключены соответственно ко второму и третьему управляющим выходам блока обработки информации 5. Внутренняя 4 и внешняя 6 рамки подвеса снабжены также соответствующими измерителями угла поворота 9 и 10, выполненными, например, с использованием высокоскоростных оптических угловых энкодеров SIGNUM RESM с разрешением до 0,01′′.
Блок обработки информации 5 выполнен в виде многопроцессорного устройства управления с возможностью осуществления параллельного взаимодействия с приводом 7 внутренней рамки 4 подвеса, приводом 8 внешней рамки 6 подвеса, приемником 3 излучения, измерителем угла поворота 9 внутренней рамки 4 подвеса, измерителем угла поворота 10 внешней рамки 6 подвеса. Первый и второй многоканальные входы блока обработки информации 5 подключены соответственно к N-канальному выходу измерителя угла поворота 9 внутренней рамки 4 подвеса и М-канальному выходу измерителя угла поворота 10 внешней рамки 6 подвеса. При этом число каналов N≥1, М≥1 и равно количеству преобразователей угол-код (91-9N) и (101-10M), установленных в соответствующем измерителе угла поворота 9 и 10. Блок обработки информации 5 содержит первое устройство 11 интерфейса, первые вход и выход которого являются соответственно первым входом и первым управляющим выходом блока обработки информации 5, а вторые вход и выход подключены соответственно к первым выходу и входу первого процессора 12. Все процессоры блока обработки информации 5 могут быть построены, например, на базе микросхемы TMS320DM642AGDK7. Вторые вход и выход первого процессора 12 соединены соответственно с первыми выходом и входом второго процессора 13, вторые вход и выход которого подключены соответственно к первым выходу и входу третьего процессора 14, второе устройство 15 интерфейса, первые вход и выходы которого подключены соответственно к третьему выходу и третьему входу второго процессора 13, а вторые вход и выход являются соответственно вторым входом и четвертым выходом блока обработки информации 5, третье устройство 16 интерфейса, N входов которого являются первым многоканальным входом блока обработки информации 5, а следующие М входов его являются вторым многоканальным входом, первый выход третьего устройства 16 интерфейса подключен к четвертому входу второго процессора 13, а второй выход - ко второму входу третьего процессора 14, второй выход которого подключен к входу устройства 17 управления приводами, первый и второй выход которого являются соответственно вторым и третьим управляющими выходами блока обработки информации 5.
Работает астровизирующий прибор следующим образом.
Предварительно, до начала работы астровизирующего прибора, управляющее устройство летательного аппарата (на фиг.1 не показано), используя данные навигационной системы (например, инерциальной системы, выполненной на гироплатформе), рассчитывает ожидаемое угловое положение заданной звезды, т.е. ожидаемое угловое положение оси объектива 2 астровизирующего прибора, наведенной на заданную звезду, относительно базы астровизирующего прибора. Для измерения углового положения заданной звезды, т.е. выполнения основной задачи, решаемой астровизирующим прибором, с управляющего устройства летательного аппарата в блок обработки информации 5 поступает команда на определение углового положения заданной звезды, содержащая информацию о ее ожидаемом угловом положении. Эта команда в виде двоичных кодов подается через второе устройство 15 интерфейса на второй процессор 13. Второй процессор 13 формирует и передает в третий процессор 14 соответствующую команду на определение разности между ожидаемым угловым положением звезды и фактическим угловым положением оптической оси объектива 2. Данные о фактическом положении оси объектива 2 поступают в третий процессор 14 через третье устройство 16 интерфейса с преобразователей угол-код (91-9N) и (101-10M) измерителей угла поворота 9 и 10 внутренней 4 и внешней 6 рамок подвеса. Третий процессор 14 периодически рассчитывает разность между ожидаемым угловым положением звезды и фактическим угловым положением внутренней 4 и внешней 6 рамок подвеса, т.е. угловым положением оптической оси объектива 2. Для упрощения расчетов и уменьшения времени их проведения могут приниматься данные только с одного из N преобразователей угол-код измерителя угла поворота 9 внутренней рамки 4 подвеса, и с одного из М преобразователей угол-код измерителя угла поворота 10 внешней рамки 6 подвеса. Затем третий процессор 14 преобразует периодически получаемые значения разности между ожидаемым угловым положением звезды и фактическим угловым положением оси объектива 2, например, реализует их пропорционально-интегрально-дифференциальное преобразование, характер которого может автоматически изменяться в зависимости от величины разности, условий эксплуатации и т.д., с целью обеспечения максимально быстрого и точного выхода оси объектива 2 в заданное положение и, исходя из результатов, рассчитывает величины напряжений для каждой из фаз привода 7 внутренней рамки 4 подвеса и привода 8 внешней рамки 6 подвеса для каждого момента времени (каждого значения разности). Эти рассчитанные значения в виде двоичных кодов поступают на вход устройства 17 управления приводами, которое преобразует их в соответствующие напряжения, усиливает и выдает эти напряжения на фазовые обмотки приводов 7 и 8 внутренней 4 и внешней 6 рамок подвеса. Использование бесконтактных индукционных моментных электродвигателей с электромагнитной редукцией частоты вращения ротора и возбуждением от постоянных магнитов в приводах 7 и 8 позволяет исключить многоступенчатые редукторные передачи и существенно повысить точностные показатели работы. Объектив 2 устанавливается в заданное угловое положение и с максимально высокой точностью в течение всего времени, необходимого для измерения углового положения заданной звезды, удерживается с отработкой всех возмущающих воздействий в этом положении третьим процессором 14. Одновременно изображение заданного участка звездного неба через объектив 2 поступает на приемник излучения 3 и далее, после преобразования в нем, в виде двоичных кодовых посылок через первое устройство 11 интерфейса в первый процессор 12, который выделяет изображение заданной звезды, анализирует его и через первое устройство 11 интерфейса устанавливает оптимальный для данного конкретного случая режим работы приемника излучения 3, проводит обработку оптимизированного изображения, определяет с учетом размеров изображения и т.д. положение центра изображения заданной звезды на матрице приемника 3 излучения.
Второй процессор 13 сразу после установки объектива 2 в заданное угловое положение принимает через третье устройство 16 интерфейса данные с N-преобразователей угол-код измерителя угла поворота 9 внутренней рамки 4 подвеса и М-преобразователей угол-код измерителя угла поворота 10 внешней рамки 6 подвеса и осуществляет по ним уточненный расчет углового положения оси объектива 2 относительно базы астровизирующего прибора. Количество преобразователей угол-код N и М измерителей угла поворота 9 и 10 внутренней 4 и внешней 6 рамки подвеса выбирается из условия обеспечения требуемой точности учета деформации кручения валов внутренней 4 и внешней 6 рамок подвеса, их радиальных биений и т.д. и обычно равно 4 с каждой стороны каждого из валов, т.е., как правило, N=8 и М=8. Затем с учетом поступившей с первого процессора 12 информации о расположении центра изображения заданной звезды на матрице приемника излучения 3 второй процессор 13 рассчитывает угловое положение заданной звезды относительно базы астровизирующего прибора и и выдает его через второе устройство 15 интерфейса на управляющее устройство летательного аппарата для корректировки курса.
В заявляемом астровизирующем приборе при использовании высокоточных приводов на бесконтактных индукционных моментных электродвигателях, высокоинформативных измерителей угла поворота внутренней и внешней рамок подвеса, высокоскоростного матричного приемного устройства с большим разрешением блок обработки информации, выполненный в виде многопроцессорного устройства управления, позволяет осуществлять параллельно:
- управление приводами внутренней и внешней рамок подвеса и точное удержание оси объектива в заданном угловом положении в процессе измерений;
- управление режимом работы приемника излучения 3 с обработкой выдаваемой им информации (выделение изображения заданной звезды и определение его положения на матрице приемника излучения 3);
- обработку сигналов с преобразователей угол-код измерителей угла поворота внутренней и внешней рамок подвеса и расчет углового положения заданной звезды относительно базы астровизирующего прибора.
Таким образом, при увеличении объема исходных данных для обработки, повышающем точность измерения, существенно уменьшается время измерения углового положения заданной звезды, и, тем самым, значительно снижается, особенно при больших скоростях изменения углового положения звезды относительно базы астровизирующего прибора погрешность астровизирования (до 20′′).
| название | год | авторы | номер документа |
|---|---|---|---|
| АСТРОВИЗИРУЮЩИЙ ПРИБОР | 2022 |
|
RU2793940C1 |
| АСТРОВИЗИРУЮЩИЙ ПРИБОР | 2018 |
|
RU2682260C1 |
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
| СПОСОБ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2442108C1 |
| Устройство измерения высоты небесных светил | 2022 |
|
RU2794558C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| СИСТЕМА АСТРООРИЕНТАЦИИ И СЛЕЖЕНИЯ | 1971 |
|
SU428211A1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО | 2017 |
|
RU2663537C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
Изобретение относится к области навигационного приборостроения и может найти применение в системах астроориентации и астронавигации космических аппаратов и авиационной техники. Технический результат - повышение точности. Для этого прибор содержит входную оптическую систему с объективом, в фокальной плоскости которого установлен приемник излучения, размещенные на внутренней рамке подвеса, а также внешнюю рамку подвеса и блок обработки информации, первый вход которого подключен к выходу, а первый управляющий выход - к управляющему входу приемника излучения, при этом внутренняя и внешняя рамки подвеса снабжены приводами, входы которых подключены соответственно ко второму и третьему управляющим выходам блока обработки информации, и измерителями угла поворота. Повышение точности угловых измерений достигается за счет увеличения скорости обработки информации при использовании высокоточных высокоинформативных устройств. 2 з.п. ф-лы, 2 ил.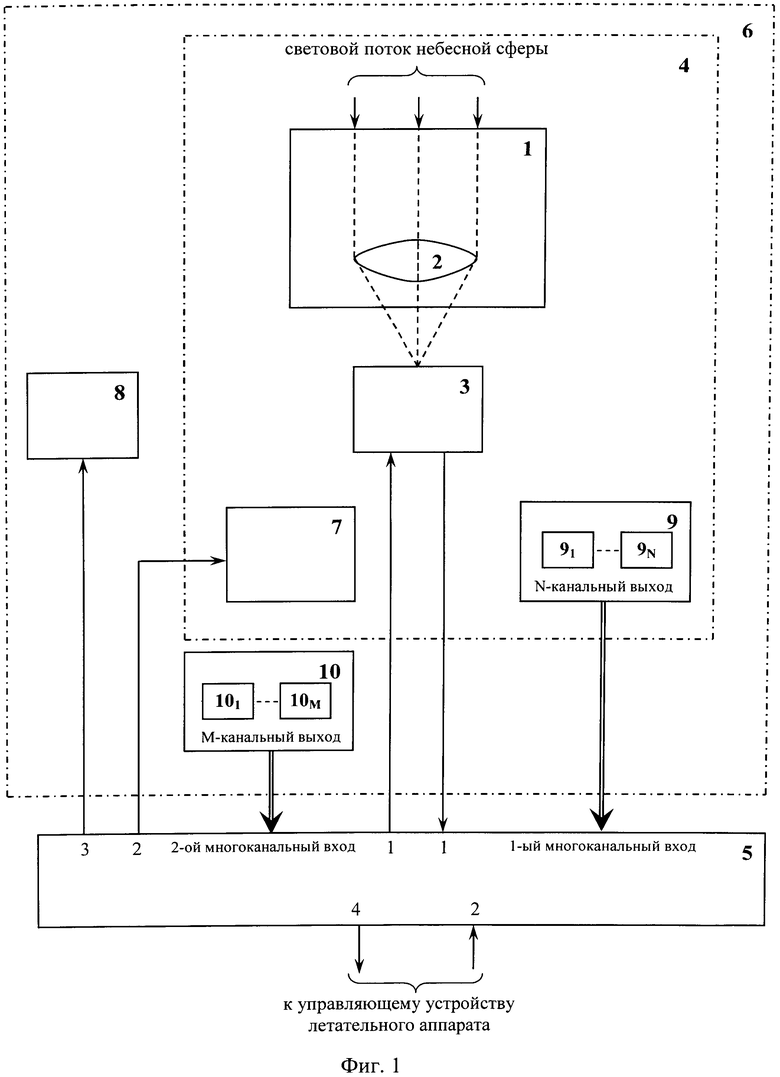
1. Астровизирующий прибор, содержащий входную оптическую систему с объективом, в фокальной плоскости которого установлен приемник излучения, размещенные на внутренней рамке подвеса, а также внешнюю рамку подвеса и блок обработки информации, первый вход которого подключен к выходу, а первый управляющий выход - к управляющему входу приемника излучения, при этом внутренняя и внешняя рамки подвеса снабжены приводами, входы которых подключены соответственно ко второму и третьему управляющим выходам блока обработки информации, и измерителями угла поворота, отличающийся тем, что блок обработки информации выполнен в виде многопроцессорного устройства управления, первый и второй многоканальные входы которого подключены соответственно к N-канальному выходу измерителя угла поворота внутренней рамки подвеса и М-канальному выходу измерителя угла поворота внешней рамки подвеса, при этом число каналов N≥1, М≥1 и равно количеству преобразователей угол-код, установленных в соответствующем измерителе угла поворота.
2. Астровизирующий прибор по п.1, отличающийся тем, что блок обработки информации содержит первое устройство интерфейса, первые вход и выход которого являются соответственно первым входом и первым управляющим выходом блока обработки информации, а вторые вход и выход подключены соответственно к первым выходу и входу первого процессора, вторые вход и выход которого соединены соответственно с первыми выходом и входом второго процессора, вторые вход и выход которого подключены соответственно к первым выходу и входу третьего процессора, второе устройство интерфейса, первые вход и выход которого подключены соответственно к третьему выходу и третьему входу второго процессора, а вторые вход и выход являются соответственно вторым входом и четвертым выходом блока обработки информации, третье устройство интерфейса, N входов которого являются первым многоканальным входом блока обработки информации, а следующие М входов являются его вторым многоканальным входом, первый выход третьего устройства интерфейса подключен к четвертому входу второго процессора, а второй выход - ко второму входу третьего процессора, второй выход которого подключен к входу устройства управления приводами, первый и второй выход которого являются соответственно вторым и третьим управляющими выходами блока обработки информации.
3. Астровизирующий прибор по п.1, отличающийся тем, что приводы внутренней и внешней рамок подвеса выполнены на бесконтактных индукционных моментных электродвигателях.
| В.И | |||
| ФЕДОСЕЕВ и др., Оптико-электронные приборы ориентации и навигации космических аппаратов | |||
| Москва, Логос, 2007 г., стр.142-150 | |||
| АСТРОВИЗИРНОЕ УСТРОЙСТВО | 2006 |
|
RU2319109C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ КОСМОНАВТОВ (АСТРОНАВТОВ) К ВНЕКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ (ВАРИАНТЫ) | 2013 |
|
RU2524503C1 |
| US 3981566 A1, 21.09.1976 | |||
| US 5914783 A1, 22.06.1999 | |||

