Изобретение относится к области приборостроения - высокоточным астроинерциальным навигационным системам для применения в составе пилотируемых авиационно-космических объектов и беспилотных летательных аппаратах.
Известен способ и устройство астроинерциальной навигации, включающее стабилизированную платформу с тремя карданными подвесами, на которую установлено астровизирующее устройство с двумя степенями свободы, разработанное для слежения за звездами днем или ночью. Платформа несет два поплавковых гироскопа и три акселерометра. Астроинерциальный прибор соединен интерфейсом с цифровым вычислителем. Вычислитель хранит данные позиционирования для 61 звезды, реализует алгоритмы платформенной инерциальной системы и осуществляет коррекцию определенных инерциальной системой навигационных параметров по результатам астрономических измерений. Высокая точность астроинерциальных измерений обуславливается качеством привязки оси визирования звезд к местной вертикали, которая реализуется инерциальной навигационной системой посредством установки платформы в горизонтальное положение. Астрокоррекция уменьшает погрешность определения истинного курса летательного аппарата и ошибку ее позиционирования независимо от времени полета "Northrop star tracer aboard B-1B. Julian Moxom. Air Force Association Show. October 1983", а также из работы "NAS-21 astro/inertial navigation system (United States). Jane's Avionics, July, 1997".
Однако данным системам присущи существенные недостатки. Точность и надежность систем ограничивается большим количеством вращающихся рамок (не менее пяти), необходимостью ультравысокой точности от преобразователей, а также требованием регулярных наземных калибровок.
Дополнительно бортовые стабилизированные платформы включают контактные кольца рамок, которые увеличивают стоимость и сложность системы и уменьшают ее надежность.
Наиболее близким техническим решением, т.е. прототипом заявленного способа, является способ астроинерциальной навигации, основанный на формировании электрических сигналов от трех гироскопов и трех акселерометров, установленных на общем базовом основании и ориентированных соответственно по осям X, Y, Z трехмерной системы координат и электрического сигнала изображения отклика фотоприемника астровизора, который ориентирован на оптическое излучение от рабочей звезды, а также на формировании соответствующих этой ориентации электрических сигналов от датчиков угла крена и тангажа и формировании сигнала навигационных ошибок параметров (US Patent №5396326; G02B 27/32; G01B 11/26; Date Mar. 7, 1995).
Основными недостатками способа являются: повышенное энергопотребление, большая стоимость и ограниченная точность выходных параметров астроинерциальной навигационной системы.
Техническим результатом заявленного способа является повышение точности выходных параметров астроинерциальной навигационной системы.
Сущность предложенного способа астроинерциальной навигации, основанного на формировании электрических сигналов от трех гироскопов и трех акселерометров, установленных на общем базовом основании и ориентированных соответственно по осям X, Y, Z трехмерной системы координат и электрического сигнала изображения отклика фотоприемника астровизора, который ориентирован на оптическое излучение от рабочей звезды, а также на формировании соответствующих этой ориентации электрических сигналов от датчиков угла крена и тангажа и формировании сигнала навигационных ошибок параметров, а также тем, что дополнительно сформирован параллельный световой поток от вновь установленного искусственного источника светового излучения, который парциально разделен на три направления, причем первое направление обеспечивает оптическую связь непосредственно между искусственным источником светового излучения и объективом астровизора, второе направление обеспечивает оптическую связь между искусственным источником светового излучения, базовым основанием инерциальной навигационной системы и объективом астровизора, а третье направление обеспечивает оптическую связь между искусственным источником светового излучения, базовым основанием инерциальной навигационной системы, стенкой корпуса астронавигационной системы, на которой установлен искусственный источник светового излучения, и объективом астровизора, при этом последовательно изображения откликов для каждого светового луча устанавливают на минимальном расстоянии от центра координатной матрицы с собственной декартовой системой координат, совмещают центр координатной матрицы с изображением отклика от первого луча, а для второго и третьего луча экспериментально определяют и запоминают постоянные коэффициенты преобразования угловых перемещений К2 и К3, которые имеют размерность [угловая сек/мм], дополнительно вводят координатную матрицу и фиксируют координаты отклонения изображения откликов второго (Р2, θ2) и третьего (Р3) лучей от центра координатной матрицы, преобразовывают их в цифровой электрический сигнал и запоминают, переводят систему в режим эксплуатации, для чего выключают искусственный источник светового излучения, ориентируют астровизор на излучение от рабочей звезды и вычисляют навигационные ошибки:
крена Δγ=θ2·К2; тангажа Δυ=Р2·К2; курса Δψ=Р3·К3, где Δγ, Δυ, Δψ измеряют в [углов. мин], θ2, P1, P2 - замеренные отклонения второго и третьего лучей на координатной матрице с размерностью [мм] К2 и К3 - коэффициенты преобразования угловых перемещений с размерностью [углов. мин/мм], а затем определяют истинные значения пилотажных параметров:
курса ψист=ψ-Δψ; тангажа υист=υ-Δυ; крена γист=γ-Δγ, где - ψ, υ, γ - вычисленные пилотажные параметры объекта в инерциальной системе координат с размерностью [углов. мин], при этом периодически корректируют значения ранее определенных отклонений θ2, P2, P3, для чего в вычислителе формируют управляющий сигнал, который подают на блок управления поворотными механизмами и вновь устанавливают астровизор в положение настройки, включают искусственный источник светового излучения и повторяют процедуру вычисления значений координат отклонения для трех опорных лучей, причем отсчет отклонений ведут от истинного положения отклика изображения первого луча на координатной матрице для текущего момента времени, модифицируют соответствующий раздел блока памяти и используют их в следующем периоде эксплуатации.
Наиболее близким техническим решением заявленного устройства, т.е. прототипом, является устройство для реализации способа, содержащее первый корпус, в котором установлены сориентированные по каждой из осей трехмерной координатной системы три гироскопа и три акселерометра, установленные на общем базовом основании, каждый из которых соответственно через первый и второй аналогово-цифровые преобразователи сигналов соединены с первым и вторым входом блока памяти, последовательно соединенного с вычислителем и блоком исполнительных механизмов, а также содержащее блок управления поворотными механизмами, первый выход которого соединен с первым блоком поворотных механизмов, первый выход которого подключен к внешней рамке первого поворотного механизма, соединенного с датчиком крена, выход которого через третий аналогово-цифровой преобразователь сигнала подключен к третьему входу блока памяти, а второй выход первого блока поворотных механизмов последовательно соединен с внутренней рамкой второго поворотного механизма, датчиком тангажа, четвертым аналогово-цифровым преобразователем сигнала и четвертым входом блока памяти, при этом третий выход блока поворотных механизмов подключен к астровизору, который содержит последовательно соединенные объектив астровизора, фотоприемник и пятый аналогово-цифровой преобразователь сигнала, выход которого подключен к пятому входу блока памяти.
Недостатками указанного устройства являются ограниченная точность выходных параметров, повышенное энергопотребление и большая стоимость астроинерциальной навигационной системы.
Техническим результатом заявленного устройства является повышение точности выходных параметров астроинерциальной системы навигации, значительное уменьшение потребляемой мощности, габаритов и стоимости изделия.(US Patent №5396326; G02B 27/32; G01B 11/26; Date Mar.7, 1995).
Сущность предложенного устройства для реализации способа астроинерциальной навигации, содержащее первый корпус, в котором установлены сориентированные по каждой из осей трехмерной координатной системы три гироскопа и три акселерометра, установленные на общем базовом основании, каждый из которых соответственно через первый и второй аналогово-цифровые преобразователи сигналов соединены с первым и вторым входом блока памяти, последовательно соединенного с вычислителем и блоком исполнительных механизмов, а также содержащее блок управления поворотными механизмами, первый выход которого соединен с первым блоком поворотных механизмов, первый выход которого подключен к внешней рамке первого поворотного механизма, соединенного с датчиком крена, выход которого через третий аналогово-цифровой преобразователь сигнала подключен к третьему входу блока памяти, а второй выход первого блока поворотных механизмов последовательно соединен с внутренней рамкой второго поворотного механизма, датчиком тангажа, четвертым аналогово-цифровым преобразователем сигнала и четвертым входом блока памяти, при этом третий выход блока поворотных механизмов подключен к астровизору, который содержит последовательно соединенные объектив астровизора, фотоприемник и пятый аналогово-цифровой преобразователь сигнала, выход которого подключен к пятому входу блока памяти, а также тем, что дополнительно в систему введен второй корпус, при этом первый корпус жестко соединен как с общим базовым основанием, так и с вторым корпусом в плоскости УZ, причем в общей стенке между первым и вторым корпусами сформировано оптическое окно, а на внутренней стенке второго корпуса установлен искусственный источник светового излучения, входящий в состав блока формирования светового потока, который также содержит соединенные оптически последовательно конденсор и движущуюся шторку с диафрагмой, к которой электрически подключен второй блок поворотных механизмов на три положения, вход которого подсоединен к второму выходу блока управления поворотными механизмами, а на выходах блока формирования светового потока сформированы три опорных луча, причем в первом положении движущейся шторки с диафрагмой непосредственно оптически соединены первый оптический выход блока формирования светового потока с первым оптическим входом объектива астровизора, во втором положении движущейся шторки с диафрагмой второй оптический луч подан через второй оптический выход блока формирования светового потока и первый вход первого блока оптической привязки, содержащего оптически последовательно соединенные первую отражающую грань первой призмы, оптическое окно, первое зеркало, оптическое окно, вторую отражающую грань первой призмы на оптический третий вход объектива астровизора, а в третьем положении движущейся шторки с диафрагмой третий опорный оптический луч через третий оптический выход блока формирования светового потока подан на оптический вход второго блока оптической привязки, содержащий оптически последовательно соединенные первую отражающую грань второй призмы, отражающую грань третьей призмы, второе зеркало, отражающую грань третьей призмы, вторую отражающая грань второй призмы, второй оптический вход объектива астровизора, при этом фотоприемник дополнительно снабжен координатной матрицей, а четвертый оптический вход объектива астровизора направлен на световое излучение от рабочей звезды, причем первый выход вычислителя подключен к входу блока управления поворотными механизмами.
Техническая реализация заявленного астроинерциального навигационного устройства осуществляется на аппаратно-программном комплексе с использованием элементной базы компьютерной техники, современной микроэлектроники, а также путем использования элементов построения оптических систем и высокоточной механики.
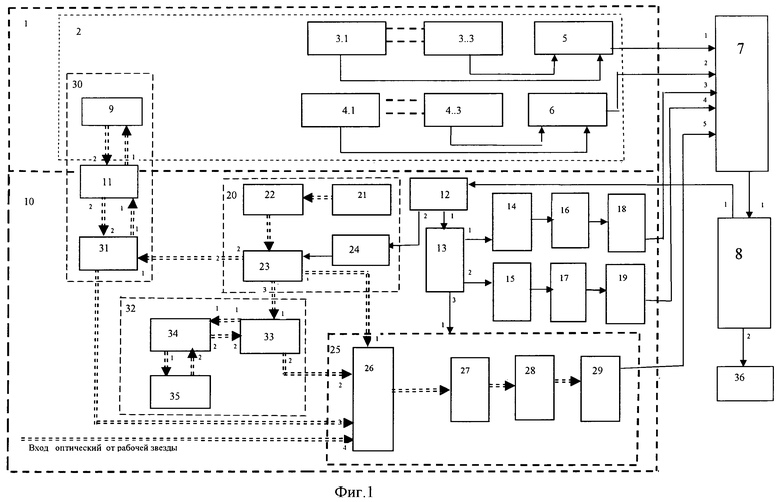
На Фиг.1 изображена функциональная схема заявленного устройства астроинерциальной навигационной системы, где: первый корпус 1, общее базовое основание 2, гироскоп 3.1-3.3, акселерометр 4.1-4.3, первый аналогово-цифровой преобразователь сигнала 5, второй аналогово-цифровой преобразователь сигнала 6, блок памяти 7, вычислитель 8, первое зеркало 9, второй корпус 10, оптическое окно 11, блок управления поворотными механизмами 12, первый блок поворотных механизмов 13, внешняя рамка первого поворотного механизма 14, внутренняя рамка второго поворотного механизма 15, датчик крена 16, датчик тангажа 17, третий аналогово-цифровой преобразователь сигнала 18, четвертый аналогово-цифровой преобразователь сигнала 19, блок формирования светового потока 20, искусственный источник светового излучения 21, конденсор 22, движущаяся шторка с диафрагмой 23, второй блок поворотных механизмов 24, астровизор 25, объектив астровизора 26, фотоприемник 27, координатная матрица 28, пятый аналогово-цифровой преобразователь сигнала 29, первый блок оптической привязки 30, первая призма 31, второй блок оптической привязки 32, вторая призма 33, третья призма 34, второе зеркало 35, блок исполнительных механизмов 36.
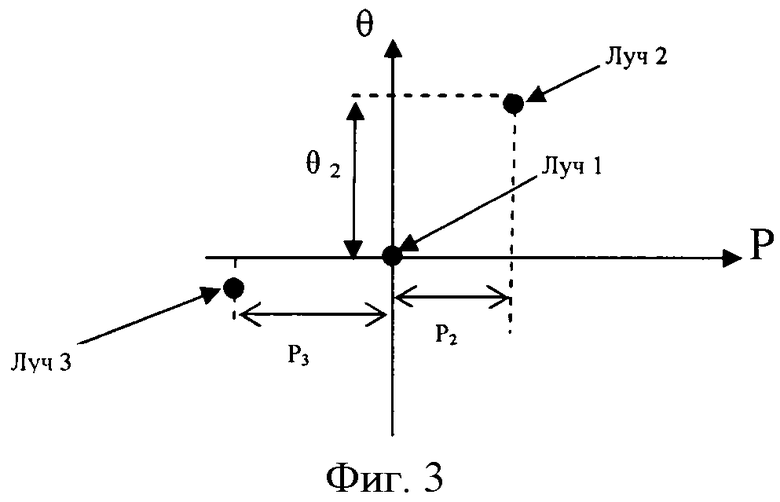
На Фиг.2 изображена схема прохождения оптических лучей, где: первый корпус 1, общее базовое основание 2, первое зеркало 9, второй корпус 10, оптическое окно 11, искусственный источник светового излучения 21, конденсор 22, движущаяся шторка с диафрагмой 23, объектив астровизора 26, фотоприемник 27, координатная матрица 28, первая призма 31, вторая призма 33, третья призма 34, второе зеркало 35.
На Фиг.3 изображен пример вида координатной матрицы при измерении отклонения лучей.
Реализация заявленного способа астроинерцильной навигации поясняется работой устройства.
В первом корпусе 1 (фиг.1) устанавливают датчики инерциальной навигационной системы определения координат движущегося объекта, для чего на общем базовом основании 2 размещают, ориентируют в пространстве в трехмерной системе координат и жестко закрепляют три гироскопа 3.1-3.3 и три акселерометра 4.1-4.3, (число датчиков может изменяться, например, по одному трехосному датчику угловых скоростей и угловых ускорений), выходы которых соответственно через первый и второй аналогово-цифровые преобразователи сигналов 5 и 6 подключены к блоку памяти 7 через его первый и второй входы, при этом выход блока памяти 7 соединен с входом вычислителя 8.
К первому корпусу 1 жестко закрепляют в плоскости YZ предварительно ориентированный в пространстве второй корпус 10, в котором размещены блоки астровизирующей системы, а между ними формируют оптическое окно 11.
Во втором корпусе 10 установлены на поворотном механизме (например, карданном подвесе) внешняя рамка 14 (поворачивающаяся вокруг оси α, которая соответствует оси Х приборной системы координат) и внутренняя рамка 15 (поворачивающаяся вокруг оси β, перпендикулярной оси α, и направлена вдоль оси Y), при этом ось Z приборной системы координат направлена перпендикулярно плоскости XY.
На осях α и β соответственно закреплены датчик крена 16 и датчик тангажа 17, которые через третий и четвертый аналогово-цифровые преобразователи сигналов 18 и 19 подключены к третьему и четвертому входам блока памяти 7.
На этапе настройки астроинерциальной навигационной системы осуществляется оптическая привязка приборных систем координат инерциальной и астровизирующей навигационных систем. На первом выходе блока управления поворотными механизмами 12 формирует электрические сигналы, которые подают на вход первого блока поворотных механизмов 13 и через его первый и второй выходы устанавливают внешнюю рамку первого поворотного механизма 14 и внутреннюю рамку второго поворотного механизма 15 в положение привязки по искусственному источнику светового излучения 21. При этом на третьем выходе блока управления поворотными механизмами 13 формируют соответствующий сигнал и поворачивают астровизор 25 таким образом (Фиг.3), чтобы ось визирования объектива астровизора 26 вышла за пределы конуса обзора астроориентиров.
Осуществление оптической взаимной привязки систем координат инерциальной и астровизирующей навигационных систем минимизирует погрешности измерений параметров движения летательного объекта. Для этого устанавливают искусственный источник светового излучения 21, например светодиод, луч которого направляют на конденсор 22, с помощью которого получают параллельный световой поток, который парциально разделяют на три луча и пространственно фильтруют.
На первом этапе настройки на выходе блока управления поворотными механизмами 12 формируются электрические сигналы, которые подают на вход блока поворотных механизмов 13 и через его третий выход устанавливают астровизор 25 в положение привязки по искусственному источнику излучения и включают искусственный источник светового излучения 21 (Фиг.2), а на выходе конденсора 22 формируют параллельный световой поток, устанавливают пространственный фильтр, например движущуюся шторку с диафрагмой 24 в положение, когда в объектив астровизора 26 подают только луч 1 (перекрывают прохождение лучей 2 и 3), который затем через фотоприемник 27 фиксирует оптическое излучение (луч 1) на координатной матрице 28 в собственной системе координат, например Р, θ. Изменяют и жестко фиксируют угловое положение искусственного источника светового излучения 21 в пространстве таким образом, чтобы изображение луча 1 находилось в центре координатной матрицы 28.
На втором этапе настройки (Фиг.2) в блоке формирования светового потока 20 перекрывают движущейся шторкой с диафрагмой 23 лучи 1 и 3, а часть параллельного светового пучка (луч 2) с выхода конденсора 22 направляют в первый блок оптической привязки 30 на первую призму 31 с двумя отражающими гранями. Отраженный от первой грани первой призмы 31 луч (луч 2) направляют через оптическое окно 11 на первое зеркало 9, а от зеркала 9 - на вторую грань первой призмы 31 таким образом, чтобы отраженный от второй грани первой призмы 31 луч был направлен параллельно исходному лучу в объектив астровизора 26 и через фотоприемник 27 на координатную матрицу 28, на которой фиксируют координаты принятого изображения (относительно собственных координатных осей Р и θ), устанавливают изображение луча 2 на минимально возможном расстоянии от центра координатной матрицы 28 путем регулировки пространственного положения первой призмы 31, а соответствующий сигнал подают через пятый аналогово-цифровой преобразователь 29, на пятый вход блока памяти 7 и запоминают в соответствующем разделе.
На третьем этапе настройки перекрывают движущейся шторкой с диафрагмой 23 лучи 1 и 2 и соответствующую часть светового пучка (луч 3) с третьего выхода блока формирования светового потока 20 направляют (Фиг.2) во второй блок оптической привязки 32 на вторую призму 33.
Отраженный от первой грани второй призмы 33 луч (луч 3) направляют на третью призму 34, а от нее - на второе зеркало 35. После отражения от второго зеркала 35 луч 3 вновь направляют через третью призму 34 и вторую грань второй призмы 33 в объектив астровизора 26, а затем через фотоприемник 27 на координатную матрицу 28, фиксируют координаты принятого изображения, устанавливают изображение луча 3 на минимально возможном расстоянии от центра координатной матрицы 28 путем регулировки положения второй призмы 33, а соответствующий сигнал подают на вход пятого аналогово-цифрового преобразователя 29, на выходе которого формируют цифровой электрический сигнал, который подают на пятый вход блока памяти 7 и запоминают в соответствующем разделе.
В процессе настройки экспериментально определяют и запоминают в блоке памяти 7 коэффициенты преобразования угловых перемещений K1 и К2 [углов. мин/мм], численные значения которых постоянны и зависит от архитектуры оптикоэлектронной схемы.
На фиг.3 приведен в качестве примера вариант изображения откликов оптических сигналов на координатной матрице, по которой определяют величину перекоса осей приборной системы координат Δψ (курс), Δυ (тангаж), Δγ (крен), причем луч 2 выявляет Δυ и Δγ, а луч 3 - Δψ, которые вычисляют по формулам:
Δγ=θ2·K1; Δυ-Р2·K1; Δυ=Р3·К1, Δψ=P3·K2,
θ2, P2, P3 - замеренные отклонения лучей на координатной матрице.
Перекос обусловлен как конструктивными причинами (допуска на изготовление корпусов, точностью их установки на объекте), так и эксплуатационными (температурными и механическими воздействиями, перепадом давления окружающей среды, износом амортизаторов).
Истинные значения пилотажных параметров определяют по формулам: ψи=ψ-Δψ; υи=υ-Δυ; γи=γ-Δγ, где - ψ, υ, γ вычисленные пилотажные параметры объекта (Бромбер П.В. Теория инерциальных систем навигации. - М.: Наука. 1979).
В режиме эксплуатации отключают искусственный источник светового излучения 21, а астровизор 25 переключают в режим наведения на небесное светило. Далее периодически уточняют величину взаимного расхождения приборных систем координат, для чего формируют на первом выходе вычислителя 8 управляющий сигнал, который подают на вход блока управления поворотными механизмами 12, формируют на его первом выходе соответствующие управляющие сигналы, которые подают на вход блока поворотных механизмов 13, и через его первый и второй выходы устанавливают внешнюю рамку первого поворотного механизма 14 и внутреннюю рамку второго поворотного механизма 15 в положение привязки по искусственному источнику излучения и определяют новые значения (θ2, P2, P3), которые запоминают в блоке памяти 7 и затем замещают ими ранее использованные значения для расчетов навигационных параметров летательного аппарата.
Вычисленные величины навигационных параметров с выхода вычислителя поступают в блок исполнительных механизмов 36, например в органы управления движением летательного аппарата, на двигатели стабилизации радиолокационных антенн, на пульт управления летчика.
Использование заявленного изобретения позволит существенно уменьшить погрешность измерения истинного курса, углового и пространственного положения объекта, что соответственно приведет к повышению безопасности в системах управления объектами авиационно-космического комплекса и в других сферах применения астроинерциальных систем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2375679C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КАЧКИ АВИАНОСЦА И МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2408848C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| СПОСОБ ОПТИМАЛЬНОГО ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И ЕЁ КОРРЕКЦИИ ПО НЕПОДВИЖНОМУ НАЗЕМНОМУ ОРИЕНТИРУ С ИЗВЕСТНЫМИ ГЕОГРАФИЧЕСКИМИ КООРДИНАТАМИ | 2019 |
|
RU2713582C1 |
| Способ астроинерциальной ориентации и устройство для его осуществления | 2022 |
|
RU2836748C2 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
Изобретение относится к высокоточным астроинерциальным навигационным системам. Для построения астроинерциальной навигационной системы объединяют изготовленные в индивидуальных корпусах инерциальную и астронавигационную системы путем жесткого объединения их корпусов в плоскости Y2, создают в общей стенке между ними оптическое окно, формируют сигналы оптической привязки приборных систем координат, по которым вычисляют навигационные ошибки и истинные значения пилотажных параметров. Устройство для реализации способа содержит установленные в первом корпусе на общем базовом основании три гироскопа и три акселерометра, а во втором корпусе - астровизор, при этом в обоих корпусах дополнительно располагают элементы блоков оптической коррекции от искусственного источника света, формируют на координатной матрице изображение сигналов погрешности навигационных ошибок крена, тангажа и курса, которые учитывают при вычислении истинных значений пилотажных параметров. Изобретение позволяет уменьшить погрешности измерения истинного курса, углового и пространственного положения объекта. 2 н.п. ф-лы, 3 ил.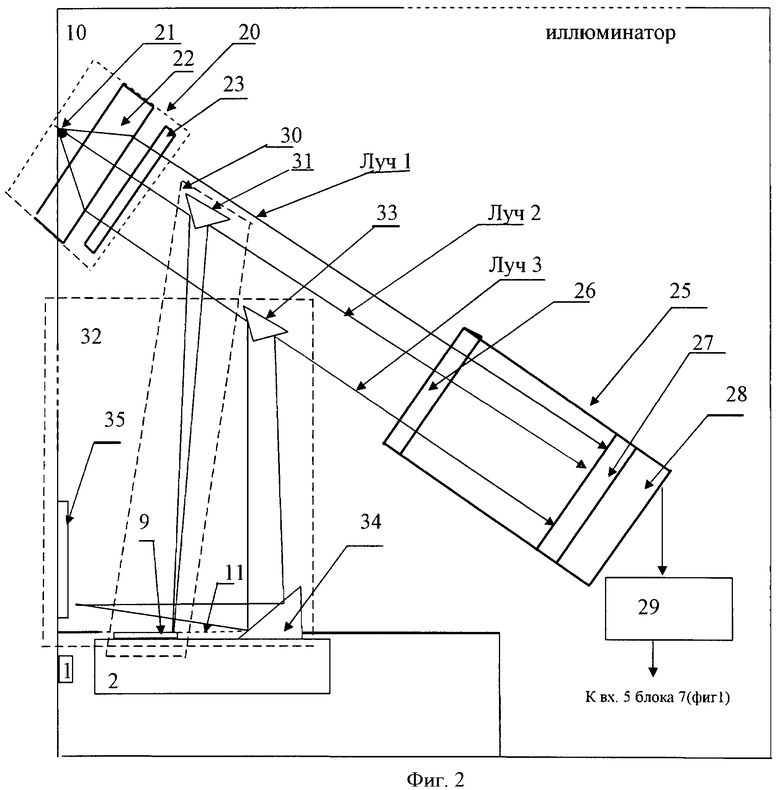
1. Способ астроинерциальной навигации, основанный на формировании электрических сигналов от трех гироскопов и трех акселерометров, установленных на общем базовом основании и ориентированных соответственно по осям X, Y, Z трехмерной системы координат, и электрического сигнала изображения отклика фотоприемника астровизора, который ориентирован на оптическое излучение от рабочей звезды, а также на формировании соответствующих этой ориентации электрических сигналов от датчиков угла крена и тангажа и формировании сигнала навигационных ошибок параметров, отличающийся тем, что дополнительно сформирован параллельный световой поток от вновь установленного искусственного источника светового излучения, который парциально разделен на три направления, причем первое направление обеспечивает оптическую связь непосредственно между искусственным источником светового излучения и объективом астровизора, второе направление обеспечивает оптическую связь между искусственным источником светового излучения, базовым основанием инерциальной навигационной системы и объективом астровизора, а третье направление обеспечивает оптическую связь между искусственным источником светового излучения, базовым основанием инерциальной навигационной системы, стенкой корпуса астронавигационной системы, на которой установлен искусственный источник светового излучения, и объективом астровизора, при этом последовательно изображения откликов для каждого светового луча устанавливают на минимальном расстоянии от центра координатной матрицы с собственной декартовой системой координат, совмещают центр координатной матрицы с изображением отклика от первого луча, а для второго и третьего лучей экспериментально определяют и запоминают постоянные коэффициенты преобразования угловых перемещений К2 и К3, которые имеют размерность [угловая с/мм], дополнительно вводят координатную матрицу и фиксируют координаты отклонения изображения откликов второго (Р2, θ2) и третьего (Р3) лучей от центра координатной матрицы, преобразовывают их в цифровой электрический сигнал и запоминают, переводят систему в режим эксплуатации для чего выключают искусственный источник светового излучения, ориентируют астровизор на излучение от рабочей звезды и вычисляют навигационные ошибки:
крена Δγ=θ2·К2; тангажа Δυ=Р2·К2; курса Δψ=Р3·К3,
где Δγ, Δυ, Δψ измеряют в [углов. мин], θ2, Р2, Р3 - замеренные отклонения второго и третьего лучей на координатной матрице с размерностью [мм], К2 и К3 - коэффициенты преобразования угловых перемещений с размерностью [углов. мин/мм],
а затем определяют истинные значения пилотажных параметров:
курса ψист=ψ-Δψ; тангажа υист=υ-Δυ; крена γист=γ-Δγ,
где ψ, υ, γ - вычисленные пилотажные параметры объекта в инерциальной системе координат с размерностью [углов. мин], при этом периодически корректируют значения ранее определенных отклонений θ2, Р2, Р3, для чего в вычислителе формируют управляющий сигнал, который подают на блок управления поворотными механизмами и вновь устанавливают астровизор в положение настройки, включают искусственный источник светового излучения и повторяют процедуру вычисления значений координат отклонения для трех опорных лучей, причем отсчет отклонений ведут от истинного положения отклика изображения первого луча на координатной матрице для текущего момента времени, модифицируют соответствующий раздел блока памяти и используют их в следующем периоде эксплуатации.
2. Устройство для реализации способа, содержащее первый корпус, в котором установлены сориентированные по каждой из осей трехмерной координатной системы три гироскопа и три акселерометра, установленные на общем базовом основании, каждый из которых соответственно через первый и второй аналогово-цифровые преобразователи сигналов соединены с первым и вторым входом блока памяти, последовательно соединенного с вычислителем и блоком исполнительных механизмов, а также содержащее блок управления поворотными механизмами, первый выход которого соединен с первым блоком поворотных механизмов, первый выход которого подключен к внешней рамке первого поворотного механизма, соединенного с датчиком крена, выход которого через третий аналогово-цифровой преобразователь сигнала подключен к третьему входу блока памяти, а второй выход первого блока поворотных механизмов последовательно соединен с внутренней рамкой второго поворотного механизма, датчиком тангажа, четвертым аналогово-цифровым преобразователем сигнала и четвертым входом блока памяти, при этом третий выход блока поворотных механизмов подключен к астровизору, который содержит последовательно соединенные объектив астровизора, фотоприемник и пятый аналогово-цифровой преобразователь сигнала, выход которого подключен к пятому входу блока памяти, отличающееся тем, что дополнительно в систему введен второй корпус, при этом первый корпус жестко соединен как с общим базовым основанием, так и с вторым корпусом в плоскости YZ, причем в общей стенке между первым и вторым корпусами сформировано оптическое окно, а на внутренней стенке второго корпуса установлен искусственный источник светового излучения, входящий в состав блока формирования светового потока, который также содержит соединенные оптически последовательно конденсор и движущуюся шторку с диафрагмой, к которой электрически подключен второй блок поворотных механизмов на три положения, вход которого подсоединен к второму выходу блока управления поворотными механизмами, а на выходах блока формирования светового потока сформированы три опорных луча, причем в первом положении движущейся шторки с диафрагмой непосредственно оптически соединены первый оптический выход блока формирования светового потока с первым оптическим входом объектива астровизора, во втором положении движущейся шторки с диафрагмой второй оптический луч подан через второй оптический выход блока формирования светового потока и первый вход первого блока оптической привязки, содержащего оптически последовательно соединенные первую отражающую грань первой призмы, оптическое окно, первое зеркало, оптическое окно, вторую отражающую грань первой призмы на оптический третий вход объектива астровизора, а в третьем положении движущейся шторки с диафрагмой третий опорный оптический луч через третий оптический выход блока формирования светового потока подан на оптический вход второго блока оптической привязки, содержащего оптически последовательно соединенные первую отражающую грань второй призмы, отражающую грань третьей призмы, второе зеркало, отражающую грань третьей призмы, вторую отражающую грань второй призмы, второй оптический вход объектива астровизора, при этом фотоприемник дополнительно снабжен координатной матрицей, а четвертый оптический вход объектива астровизора направлен на световое излучение от рабочей звезды, причем первый выход вычислителя подключен к входу блока управления поворотными механизмами.
| US 5396326 А, 07.03.1995 | |||
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| ИНФОРМАЦИОННАЯ СИСТЕМА МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ | 2002 |
|
RU2222781C2 |
| CN 101793523 А, 04.08.2010 | |||
| CN 101275844 А, 01.10.2008 | |||
| СПОСОБ ЛЕЧЕНИЯ ХРОНИЧЕСКИХ ГЕПАТИТОВ | 1998 |
|
RU2175237C2 |

