Изобретение относится к космонавтике, в частности к системам астрокоррекции азимута пуска ракет-носителей.
Целью изобретения является уменьшение массы и габаритов астровизирного устройства (АВУ) и увеличение надежности его работы, что позволит устанавливать АВУ непосредственно на гиростабилизированнную платформу (ГСП) системы управления ракеты-носителя и доприцеливать ракету на активном участке полета после сравнительно грубого прицеливания по азимуту пуска во время предпусковой подготовки. Это позволит также упростить и удешевить наземную систему прицеливания и устранить неустранимые при любом наземном прицеливании погрешности в азимуте пуска, связанные с разрывом по времени между запуском двигательной установки первой ступени ракеты и ее отрывом от пускового устройства.
Сущность изобретения заключается в том, что фоточувствительная часть (ФЧЧ) АВУ выполняется на основе сканирующего пьезоэлемента и одиночного фотоприемника.
Аналогом является АВУ с использованием голографического метода конструирования (см. Математическое моделирование процессов и систем на ЭВМ: В.В.Малинин, ЦИТСГГА, 2003, http://svarka.susu.ас.ru/library/study/mathmodel/index.html. - раздел 8, п.8.1.3.).
Прототипом выбрано АВУ с ПЗС - матрицей в роли фотоприемника (см. Математическое моделирование процессов и систем на ЭВМ: В.В.Малинин, ЦИТ СГГА, 2003, http://svarka.susu.ac.ru/library/study/mathmodel/index.html. - раздел 8, п.8.1.3.).
Эти варианты конструкции АВУ имеют ряд недостатков, среди которых во-первых, наличие механических подвижных частей, что уменьшает надежность работы устройства, во-вторых необходимость постоянного температурного контроля устройств, что приводит к увеличению массы и габаритов и, в-третьих сложность обработки полученного изображения или видеосигнала.
Отличие предлагаемого устройства от прототипа заключается в исполнении ФЧЧ, которая содержит сканирующий элемент и по меньшей мере два фотоприемника (ФП). Сканирующий элемент выполнен в виде пьезоэлемента, закругленная отражающая часть которого применена в качестве усилителя смещения отраженного луча, что аналогично устройству строчной двухкоординатной развертки (см. SU 1219995 А (Попов В.Д. и др.), 1986 г.). В этом случае при малом колебании сканирующего элемента любой луч после объектива, отражаясь от закругленной поверхности, попадает на ФП в момент, связанный с положением оси объектива относительно направления на звезду и характеристиками развертки. Сканирование пьезоэлемента основывается на его основном свойстве изменять геометрические размеры под действием напряжения.
АВУ устроено и работает следующим образом.
Изображение звезды 1 из звездного поля формируется объективом 2 (фиг.1) и направляется на ФП 3 (условно показан один из ФП). В фокальной плоскости объектива 2 находится сканирующая сферическая отражающая поверхность 4, закрепленная на пьезокерамическом элементе 5. Сканирование создается вторичным пьезоэффектом, возникающим под действием двух периодических переменных напряжений Ux и Uy, приложенных через обкладки к пьезокерамическому элементу и соответствующих осям Х и У развертки.
В результате развертки лучи от звезды 1, прошедшие через объектив 2, в какие-то моменты падают на входы ФП 3. Эти моменты связаны с положением луча от звезды относительно оси объектива и траекторией развертки. Так как развертка стабильна (стабильны Ux и Uy), то момент появления сигнала от ФП внутри периода развертки жестко связан с положением луча относительно визирной оси объектива, а положения оси объектива фиксировано размещением АВУ на ГСП.
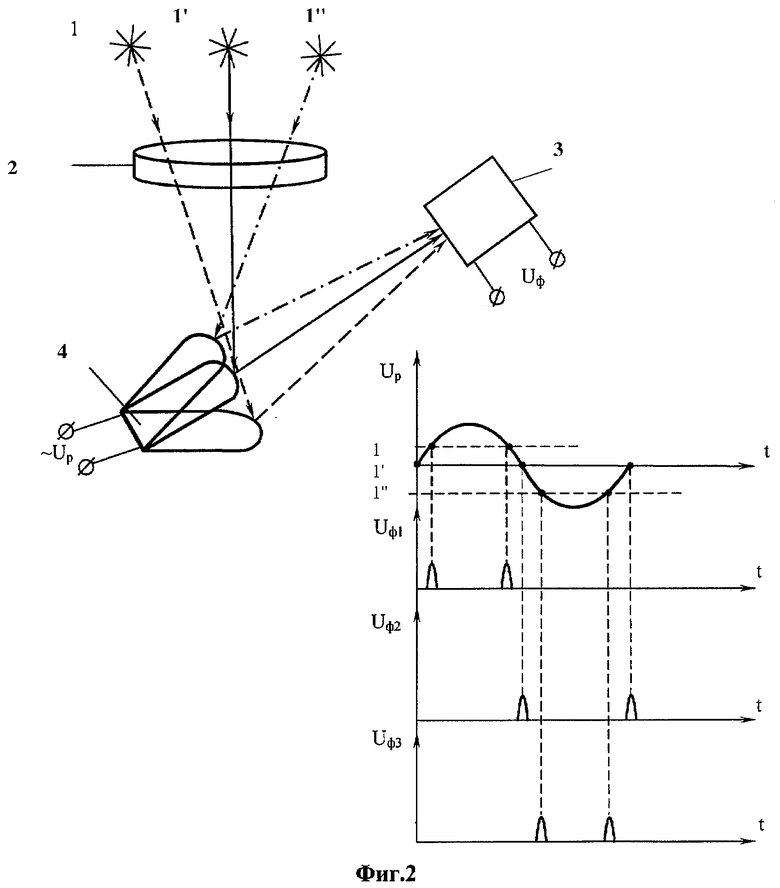
Фиг.2 поясняет работу АВУ относительно одной плоскости, например, проходящей через визирную ось объектива 2 и ось Х (или У) развертки при различных положениях звезды (1, 1', 1''). График поясняет появление сигнала Uф на выходе фотоприемника 3. Здесь Up - напряжение развертки, Uф1, Uф2, и Uф3 - импульс засветки фотоприемника при соответствующем положении звезды и отражающей поверхности пьезокерамического элемента.
При использовании, в частности, двух ФП с различными спектральными характеристиками (например, в голубой и красной частях спектра) обеспечивается возможность корректировать положение ГСП по двум навигационным звездам, и либо просто повысить точность коррекции азимута, либо корректировать положение ГСП по двум осям, а также расширить количество возможных навигационных звезд.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫВЕДЕНИЯ НА ОРБИТУ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ ПАКЕТНОЙ СХЕМЫ НА УЧАСТКЕ ПОЛЕТА ДО ОТДЕЛЕНИЯ БОКОВЫХ БЛОКОВ | 2011 |
|
RU2481247C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО С МЕХАНИЧЕСКОЙ РАЗВЕРТКОЙ ДЛЯ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ | 2007 |
|
RU2340922C1 |
| СПОСОБ КОНТРОЛЯ ВЫСТАВКИ ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2013 |
|
RU2541152C1 |
| Оптико-электронная многоканальная головка самонаведения | 2020 |
|
RU2756170C1 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕГО ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТЯЩЕГО В СТРАТОСФЕРЕ ИЛИ НА БОЛЬШОЙ ВЫСОТЕ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО КРИТЕРИЯМ КОНДЕНСАЦИОННОГО СЛЕДА ЕГО СИЛОВОЙ УСТАНОВКИ В АТМОСФЕРЕ | 2012 |
|
RU2536769C2 |
| Оптико-пеленгационная система кругового обзора | 2020 |
|
RU2748872C1 |
| Комбинированная многоканальная головка самонаведения | 2017 |
|
RU2693028C2 |
| ПРИБОР ДЛЯ ДНЕВНОГО И НОЧНОГО НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2006 |
|
RU2310219C1 |
| СПОСОБ АВТОМАТИЗАЦИИ ЦЕЛЕУКАЗАНИЯ ПРИ ПРИЦЕЛИВАНИИ НА ВЕРТОЛЕТНОМ КОМПЛЕКСЕ | 2018 |
|
RU2697939C1 |
| Способ автономной навигации для объекта космического назначения | 2018 |
|
RU2727784C2 |
Изобретение относится к космонавтике и, в частности, к системам астрокоррекции азимута пуска ракет-носителей. Предлагаемое устройство служит для коррекции по азимуту пуска положения гиростабилизированной платформы (ГСП) системы управления ракеты-носителя и содержит размещенные на указанной платформе оптический объектив и фоточувствительную часть. Последняя состоит из по меньшей мере двух фотоприемников (ФП) с различными спектральными характеристиками и сканирующего элемента, выполненного в виде пьезоэлемента с закругленным отражающим торцом. При малом колебании сканирующего элемента любой луч после объектива, отражаясь от закругленной поверхности, попадает на одиночный ФП. Этот момент зависит от положения звезды относительно визирной оси объектива и траектории развертки. При стабильной развертке момент появления сигнала от ФП внутри периода развертки жестко связан с положением указанного луча, а положение визирной оси фиксировано при размещении устройства на ГСП. При использовании двух ФП с различными спектральными характеристиками появляется возможность корректировать положение ГСП по двум спектрально разным навигационным звездам. Техническим результатом изобретения является снижение массы и габаритов астровизирного устройства, а также повышение надежности его работы. Появляется возможность устанавливать это устройство непосредственно на гиростабилизированную платформу системы управления ракеты-носителя и доприцеливать ракету на активном участке полета после сравнительно грубого прицеливания по азимуту пуска во время предпусковой подготовки. В свою очередь это позволяет упростить и удешевить наземную систему прицеливания, а также устранить погрешности в азимуте пуска, связанные с разрывом по времени между запуском двигательной установки первой ступени ракеты и ее отрывом от пускового устройства. 2 ил.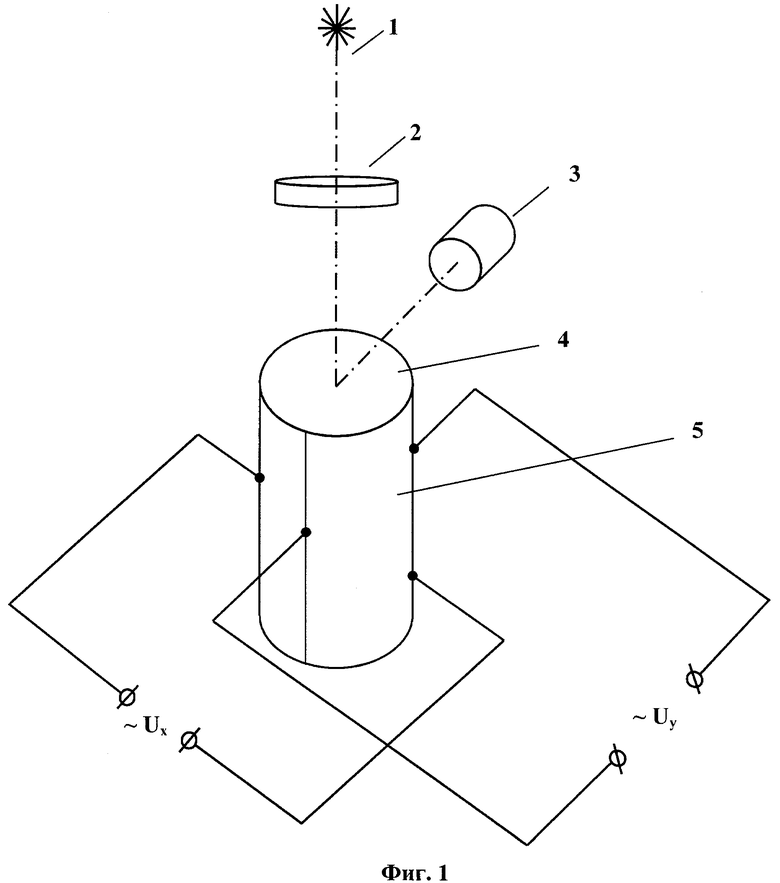
Астровизирное устройство для коррекции положения гиростабилизированной платформы системы управления ракеты-носителя по азимуту пуска, содержащее размещенные на указанной платформе оптический объектив и фоточувствительную часть, отличающееся тем, что фоточувствительная часть состоит из по меньшей мере двух фотоприемников с различными спектральными характеристиками и сканирующего элемента, выполненного в виде пьезоэлемента с закругленным отражающим торцом.
| Б.П.ВОРОНИН, Н.А.СТОЛЯРОВ | |||
| Подготовка к пуску и пуск ракет | |||
| Воениздат | |||
| М | |||
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| В.П.ПЕТРОВ, А.А.СОЧИВКО | |||
| Управление ракетами | |||
| Воениздат | |||
| М | |||
| Приспособление к комнатным печам для постепенного сгорания топлива | 1925 |
|
SU1963A1 |
| Прялка для изготовления крученой нити | 1920 |
|
SU112A1 |
| Устройство строчной двухкоординатной развертки | 1984 |
|
SU1219995A1 |
| ФОТОПРИЕМНИК | 1993 |
|
RU2097711C1 |
| Двухкоординатное сканирующее устройство | 1978 |
|
SU742853A1 |
| Сканирующее устройство | 1977 |
|
SU657387A1 |
| US 3981566 A, 21.09.1976 | |||
| СПОСОБ ПРОИЗВОДСТВА ПРОДУКТОВ ДЛИТЕЛЬНОГО ХРАНЕНИЯ ИЗ РАСТИТЕЛЬНОГО СЫРЬЯ | 2003 |
|
RU2255621C2 |
| US 5914783 A, 22.06.1999. | |||

