1
Изобретение относится к оптико-электронным приборам астроориентации и наведения и может быть использовано для ориентации различных летательных аппаратов по небесным светилам и для наведения бортового астрофизического прибора на исследуемое небесное тело или участок неба.
Известные системы астроориентации и слежения за астрономическим спутником, содержащие несколько астровизиров, дающих направление на выбранные звезды, запоминающее устройство и вычислительное устройство, выдающее сигналы на органы управления положением телескопа, обладают большой инерционностью и низкой точностью.
Для повышения быстродействия ориентации и точности слежения в предлагаемой системе один из астровизиров выполнен двухкоординатньш, а второй - однокоординатным, причем астровизиры кинематически связаны друг с другом так, что наружная ось двустепепного подвеса однокоординатного астровизира, параллельна оптической оси двухкоординатног астровизира, наружная ось подвеса которого, в свою очередь, соосна с внутренней осью поворота двустепенного телескопа астрофизического прибора.
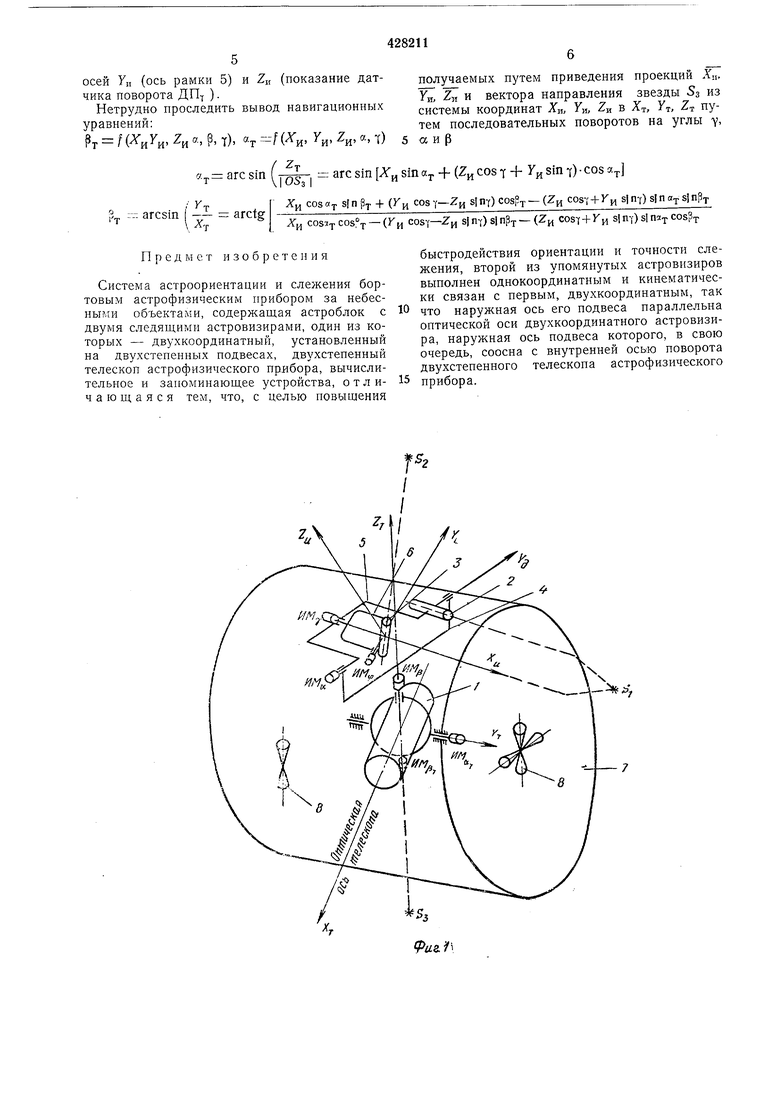
На фиг. 1 изображена кинематическая схема описываемой системы, содержащей телескоп 1, двухкоординатный астровизир 2, однокоординатный астровизир 3, внешнюю полураму 4 подвески астровизиров, среднюю раму 5, внутреннюю раму 6. Система установлена на летательном аппарате 7 с органами управления 8 последним. - система координат, связанная с осями подвески телескопа, а - инерциальная система координат.
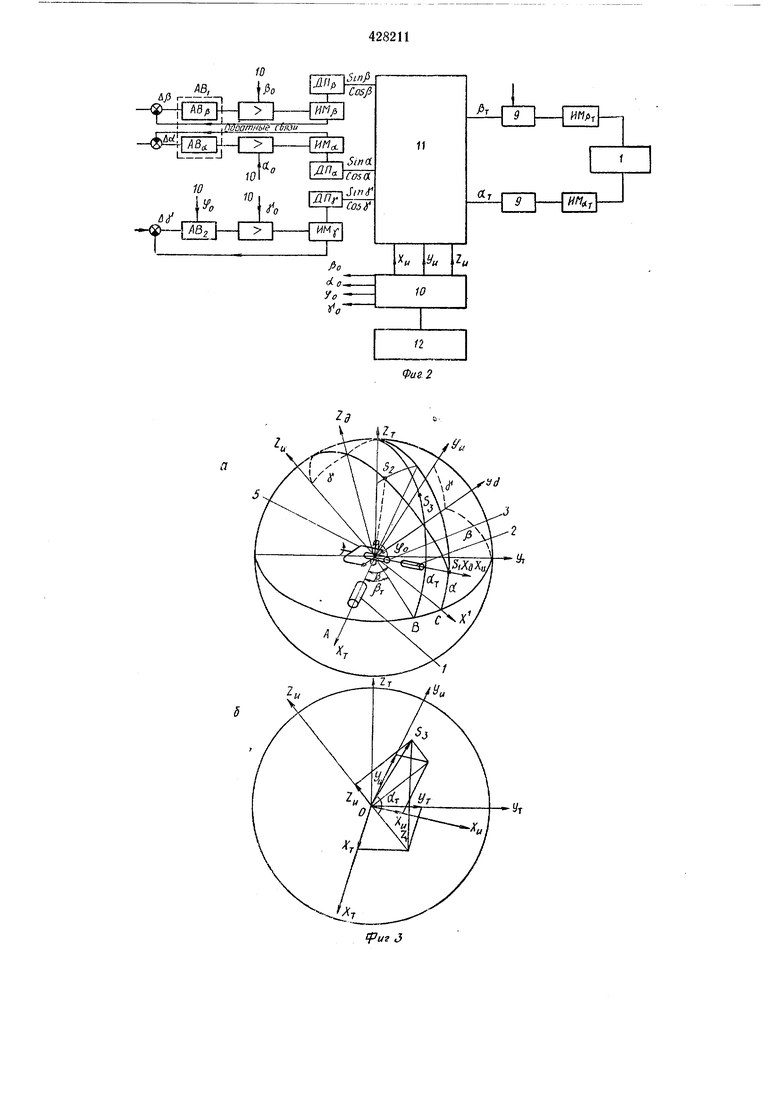
На фиг. 2 показана структурная схема системы, где ABi - первый астровизир, двухкоординатный, визирующий опорную звезду 5i по координатам р и а,
9 - усилительные устройства,
ИМа , ИМр - исполнительные механизмы астровизира АВь
10 - запоминающее устройство, хранящее координаты искомой звезды и опорных звезд,
11 - счетно-решающее устройство, вычисляющее сигналы управления телескопом.
, ИМ-( - исполнительные механизмы автовизира ABg.
ИМс,, ИМз - исполнительные механизмы телескопа,
АВ2 - второй астровизир, однокоординатиый, следящий за звездой 52 на координате Y. ДП - встроенные в исполнительные механизмы датчики поворотов вокруг соответствующих осей.
На борту летательного аппарата, предварительно соориентированного в нужном направлении в трех плоскостях, находится телескоп 1, поворот которого осуществляется при помощи исполпительных механизмов ИМ(5 и ИМс,. На внутренней оси Z.f телескопа 1 кинематически установлена подвеска двухкоординатного астровизира 2 и однокоординатного астровизира 3, состоящая из внешней полурамы 4 с приводом поворота ИМр вокруг оси ZT, средней рамы 5 с приводом поворота относительно оси Уд и внутренней полурамы 6 с приводом HMf поворота ее вокруг оси, параллельной оптической оси астровизира 2. Астровизир 3, кроме того, имеет привод поворота вокруг оси УИ для изменения относительного положения оптических осей обоих астровизиров. На фиг. 3, а точками Si, Sa обозначены две опорных звезды и точкой 5з - искомая; Т. А. - первоначальное положение оптических осей летательного аппарата, телескопа и двух астровизиров; а, ip - углы поворота и слежения первого астровизира 2; ф - угол выставка-второго астровизира относительно первого; ; Y - цоворота рамки 5 вокруг направле|ния нйпервую звезду. I 5Н :фиг. 3, б отрезки Х, УИ, ZH изображают проекции единичного вектора О5з на оси инерциальной системы координат Х, УИ, 2и, в свою очередь, Х, УТ, ZT - проекции того же вектора на оси системы координат Х, УТ, ZT телескопа. Согласно структурной схеме, показанной на фиг. 2, выходные сигналы двухкоординатного астровизира АВь пропорциональные угловым рассогласованиям звезды Si относительно его оптической оси, проходя через усилители, поступают на исполнительные механизмы ИМр , ИМа обработки углов рассогласования. Выходной сигнал астровизира АВг, проходя через усилитель также поступает на свой исполнительный механизм ИМ, обрабатывающий угол Лф рассогласования звезды S2 относительно оптической оси астровизира ABj. Далее сигналы sin р, cos р с датчика поворота ДП(з вокруг оси ZT, сигналы sin ее, cos а. с датчика поворота ДПа, сигналы sin у cos 7 с датчика поворота ДП поступают на вход счетно-решающего устройства 11. На входы устройства 11 одновременно поступают из устройства 10 координаты Х, УИ, ZH звезды SzВыходные сигналы Рт и «т, проходя через усилители мощности, поступают на исполнительные механизмы ИМр, ИМ поворота телескопа для наведения на звезду 8з. Смена координат объектов излучения на выходе запоминающего устройства происходит по командам программно-командного устройства 12. В устройстве 10 кроме координат искомого объекта также хранятся величины установок ро, «о, Фо, YO астровизиров для различных пар опорных звезд. Работает система следующим образом. На фиг. 3, а точкой А на небесной сфере обозначен след от оптической оси телескопа 1, совпадающей в начальный момент с ОДЕЮЙ из осей грубо стабилизированного в этом положении летательного аппарата. По команде программного устройства производится разворот первого астровизира 2 по двум осям на заданные из запоминающего устройства углы ро и ио в район опорной звезды Si. Затем узкоканальным астровизиром 2 по программе производится сканирование области звезды Si до ее захвата, после чего с датчиков поворота ДПз и ДПа будут поступать текущие значения углов р и а в режиме слежения. Астровизир ABs заранее выставляется под углом фа относительно астровизира АВь После захвата звезды Si включается поиск звезды S2 поворотом второго астровизира относительно линии визирования OS на угол с последующим захватом звезды Ss,. После перехода на слежение за звездой 8 в счетно-решающем устройстве производится обработка текущих углов а, р и Y относительно телескопа и координат X-if, УИ, Zn из запоминающего устройства с целью выработки сигналов рт и «т для совмещения оптической оси телескопа с направлением на искомую звезду Ss. Перед выведением навигационных уравнений рассмотрим применяемые системы координат. Па фиг. 3 изображены выбранные системы координат, при этом приняты следующие допущения. Все звезды бесконечно удалены от Земли и располол ены на небесной сфере. Земля и движущийся в ее районе летательный аппарат находятся в центре небесной сферы. Оптические оси телескопа, астровизиров ABi и АВ2, нулевые точки систем координат совмещены в центре небесной сферы. Направление на искомой невидимый объект задается единичным вектором OSz, и.меющим три проекции по осям инерциальной системы координат Хк, УИ, ZR. Одна из плоскостей инерциональной системы координат обязательно проходит через пару опорных звезд и центр небесной сферы так, чтобы ось JH проходила через заранее определенную первуюопорную звезУ Si. Построение осей координат на борту происходит так. Первоначально все оптические оси астровииров и телескопа параллельны между собой совмещены с одной из осей летательного апарата, соориентированного грубо в направении искомой звезды Sz. В этом состоянии ы имеем систему координат Х, УТ, ZT, свяанную с осями телескопа. Поиск и захват везды Si производится поворотом карданноо подвеса на углы р и а. После захвата звезы S имеем вторую систему координат Х, Уд, д, при этом считаем, что ось Xp() (оптичекая ось астровизира ABi) проходит через везду Si с точностью слежения. Захват звезды Sz обеспечивает построение 5 осей У„ (ось рамки 5) и Zn (показание датчика поворота ДП ). Нетрудно проследить вывод навигационных уравненяй: т f ( и т), «т - ( И и « т)5
arc sin ( j-Qc-I arc sin + ( + и f) т / к т :.--- arcsin I -- arctg
Пред M e т и з о б p e т e н и я
Система астроориентации и слежения бортовым астрофизическим прибором за небесными объектами, содержащая астроблок с двумя следящими астровизирами, один из которых - двухкоординатиыр, установленный на двухстепеиных подвесах, двухстепенный телескоп астрофизического прибора, вычислительное и запоминающее устройства, отличающаяся тем, что, с целью повышения
быстродействия ориентации и точности слежения, второй из упомянутых астровизиров выполнен однокоординатным и кинематически связан с первым, двухкоординатным, так
что наружная ось его подвеса параллельна оптической оси двухкоординатного астровизира, наружная ось подвеса которого, в свою очередь, соосна с внутренней осью поворота двухстепенного телескопа астрофизического
прибора. X созят smpj + (и COSY- и si ny) - (Z cosT + K, s| n) s| n a. si npj ЛГи COS°j. - (Гц COSf-Z S| nf) Sj n - (и COSTf + K S П) Sl Па COS 6 получаемых путем приведения проекций Ли, У, Z и вектора направления звезды 5з из системы координат Х„, У„, Z« в Х, Y, Z последовательных поворотов на углы -у, а и р
| название | год | авторы | номер документа |
|---|---|---|---|
| АСТРОВИЗИРУЮЩИЙ ПРИБОР | 2022 |
|
RU2793940C1 |
| АСТРОВИЗИРУЮЩИЙ ПРИБОР | 2018 |
|
RU2682260C1 |
| Устройство для астроориентации телескопа | 1975 |
|
SU697972A2 |
| Устройство для астроориентации телескопа | 1973 |
|
SU487377A1 |
| Система ориентации и стабилизации астрономического телескопа | 1989 |
|
SU1679466A1 |
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
| АСТРОВИЗИРУЮЩИЙ ПРИБОР | 2014 |
|
RU2540136C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКОГО АЗИМУТА | 2007 |
|
RU2347252C1 |
| ТЕПЛОПЕЛЕНГАТОР | 2011 |
|
RU2458356C1 |
Л
