Изобретение относится к области энергомашиностроения, в частности к электромеханическим преобразователям энергии на бесконтактных подшипниках.
Известен механизм с магнитным подвесом ротора (а.с. СССР №1569932, Н02К 7/09, 1990 г.), в котором каждый канал системы содержит датчик положения ротора, пропорционально-интегрально-дифференциальный регулятор, силовой преобразователь и два электромагнита.
Недостатком данной конструкции является сложность ее технической реализации и невысокая надежность, вызванная тем, что в данной системе применяются датчики перемещения ротора, которые необходимо устанавливать внутри корпуса электромеханического преобразователя энергии.
Известна конструкция системы управления магнитным подшипником (патент РФ №2181922 С2, Н02Р 6/16, Н02К 7/09, Н02К 29/06, 2002.04.27), каждый канал управления которой содержит датчик положения ротора, силовой преобразователь, два электромагнита, причем обмотки электромагнитов подключены к силовому преобразователю, каждый канал которого снабжен интегральным регулятором и форсирующим регулятором второго порядка, причем выход интегрального регулятора соединен с прямым входом форсирующего регулятора второго порядка, выход которого соединен со входом силового преобразователя, а выход датчика положения ротора соединен с инверсными входами обоих регуляторов.
Недостатком данной конструкции является сложность ее технической реализации и невысокая надежность, вызванная тем, что в данной системе применяются датчики перемещения ротора.
Известна конструкция магнитного подшипника (патент РФ №2246644 C1, F16C 32/04, 2005.02.20), в которой модуль управления содержит формирователь вектора радиального перемещения ротора, соединенный выходом через блок динамической обработки сигнала радиального отклонения со входом формирователя управляющих токов в обмотках управления радиальной опоры, который выходами подключен ко входам соответствующих усилителей мощности канала стабилизации радиального положения ротора, выходы которых являются первыми управляющими выходами модуля управления. Блок контроля процесса управления выполнен с возможностью передачи управляющей информации в систему автоматического управления машины. Выпрямитель напряжения соединен через емкостный фильтр с входами регулятора напряжения и источника вторичного электропитания, выполненного с возможностью подключения к выводам электропитания всех блоков модуля управления, причем один из выходов емкостного фильтра и выход регулятора напряжения являются третьими управляющими выходами модуля управления, при этом входы формирователя вектора радиального перемещения ротора являются первыми информационными входами модуля управления, а формирователь управляющих токов в обмотках управления радиальной опоры выполнен с возможностью реализации векторной стабилизации ротора по осям в радиальных направлениях.
Недостатком данной конструкции также является сложность ее технической реализации и невысокая надежность, вызванная тем, что в данной системе применяются датчики перемещения ротора, которые необходимо устанавливать внутри корпуса электромеханического преобразователя энергии.
Известен способ управления неустойчивостью в гидродинамических подшипниках (патент РФ №2399803, F16C 17/02, 08.06.2005), по которому используют магнитный подшипник в комбинации с гидродинамическим подшипником, причем гидродинамический подшипник используют в качестве подшипника, воспринимающего основную нагрузку, а магнитный подшипник используют в качестве средства управления неустойчивостью в гидродинамическом подшипнике.
Недостатком такого способа является сложность его технической реализации и невысокая надежность, вызванная тем, что в данной системе применяются датчики перемещения ротора, которые необходимо устанавливать внутри корпуса электромеханического преобразователя энергии.
Известен способ управления ротором в активных магнитных подшипниках (Журавлев Ю.Н. «Активные магнитные подшипники: Теория, расчет, применение» - СПб.: Политехника, 2003. - 206 с.: ил., стр. 98), по которому измеряют электрическую величину тока в обмотках электромагнита активного магнитного подшипника, электрически соединенного с регулятором и силовым преобразователем и по величине тока судят о положении ротора и управляют им.
Недостатком данного способа является невозможность контроля положения ротора при всех типах бесконтактных подшипников и сложность технической реализации, связанная со значительным количеством информационных каналов, а также невозможность применения данного способа во всех типах гибридных магнитных подшипников (например, в комбинации газовых или гидростатических с магнитными подшипниками на постоянных магнитах).
Известен способ бессенсорного управления активными магнитными подшипниками (патент US 5696412 А, Н02К 7/09, 20.10.1993), по которому управляющие электромагниты, электрически соединенные с регулятором и силовым преобразователем, помещают коаксиально в упорядоченном массиве, окружающем ротор, и измеряют электрическую величину на их зажимах, в качестве которой выступает падение напряжения, путем сравнения абсолютной величины падения напряжения двух противоположных электромагнитов судят о величине смещения, исходя из которой рассчитывается величина управляющего тока.
Недостатком данного способа является сложность его технической реализации, связанная со значительным количеством информационных каналов и электромагнитов, а также ограниченные функциональные возможности, обусловленные невозможностью применения данного способа во всех типах гибридных магнитных подшипников (например, в комбинации газовых или гидростатических с магнитными подшипниками на постоянных магнитах) и отсутствием возможности измерения угловой координаты.
Наиболее близким по технической сущности и достигаемому результату является способ бессенсорного управления положением ротора в бесконтактных подшипниках (патент РФ №2539690, Н02К 7/09, F16C 32/04, 27.01.2014), по которому измеряют электродвижущую силу каждой фазы и выходное напряжение электрической машины и по его изменению судят о пространственном положении ротора, при этом информация об изменении пространственного положения ротора поступает в регулятор и силовой преобразователь, которые регулируют величину воздействия управляющих элементов.
Недостатком данного изобретения является сложность его технической реализации, обусловленная использованием силовой обмотки в качестве измерительной, и связанная с этим низкая точность, также недостатком данного изобретения являются его ограниченные функциональные возможности, обусловленные сложностью измерения угловых перекосов ротора.
Задача изобретения - расширение функциональных возможностей, благодаря возможности контроля угловых и осевых перекосов, а также повышение точности измерения положения ротора, благодаря использованию трех обмоток: силовой, измерительной и формирующей измерительный сигнал.
Техническим результатом является повышение точности управления и надежности электрической машины с ротором на бесконтактных подшипниках, возможность применения предложенного способа во всех типах бесконтактных подшипников, а также появление возможности измерения перекосов ротора в осевом направлении.
Указанный результат по первому варианту достигается тем, что в способе управления положением ротора в бесконтактных подшипниках, заключающемся в измерении сигнала с обмоток электрической машины, по изменению которого судят о пространственном положении ротора, при этом информация об изменении пространственного положения ротора поступает в регулятор и силовой преобразователь, которые регулируют величину воздействия управляющих элементов, согласно изобретению в правой и левой формирующих измерительный сигнал обмотках, которые уложены в каждом пазу электрической машины, создают высокочастотное магнитное поле, частота которого больше частоты пятой гармоники электрической машины, при этом в электропроводящих элементах ротора наводят вихревые токи, которые создают вторичное магнитное поле, воздействие которого воспринимается измерительной обмоткой, и по измерению сигнала с измерительной правой и левой обмоток судят о пространственном положении ротора. Сигналы правой и левой обмоток должны быть симметричны, при несимметричности данных сигналов судят об угловых перекосах ротора, при этом информация об изменении пространственного положения ротора и угловой координаты поступает в регулятор и силовой преобразователь, которые регулируют величину, воздействия управляющих элементов.
Указанный результат по второму варианту достигается тем, что в способе управления положением ротора в бесконтактных подшипниках, заключающемся в измерение сигнала с обмоток электрической машины, по изменению которого судят о пространственном положении ротора, при этом информация об изменении пространственного положения ротора поступает в регулятор и силовой преобразователь, которые регулируют величину воздействия управляющих элементов, согласно изобретению на электропроводящих элементах ротора электрической машины выполняют засечки, при этом в электропроводящих элементах ротора под воздействием поля основной обмотки наводят вихревые токи, которые создают вторичное магнитное поле в силовой обмотке, воздействие которого воспринимается силовой обмоткой, за счет нанесенных на электропроводящих элементах ротора засечек вторичное поле, воспринимаемое силовой обмоткой, искажено и по измерению искаженного магнитного поля с силовой обмотки судят об пространственном положении ротора, а информация об изменении пространственного положения ротора и угловой координаты и поступает в регулятор и силовой преобразователь, которые регулируют величину воздействия управляющих элементов.
Кроме того указанный результат достигается тем, что в электрической машине, содержащей ротор, с бесконтактными подшипниками, систему управления в виде пропорционально-интегрально-дифференциального регулятора, силовой преобразователь и статор, в пазах которого уложена силовая обмотка, согласно изобретению в статоре выполнена прорезь, при этом в пазах статора дополнительно уложена левая и правая формирующие измерительный сигнал и измерительные обмотки, а система управления содержит фильтры с возможностью фильтрации напряжения, наводимого ротором в измерительной обмотке.
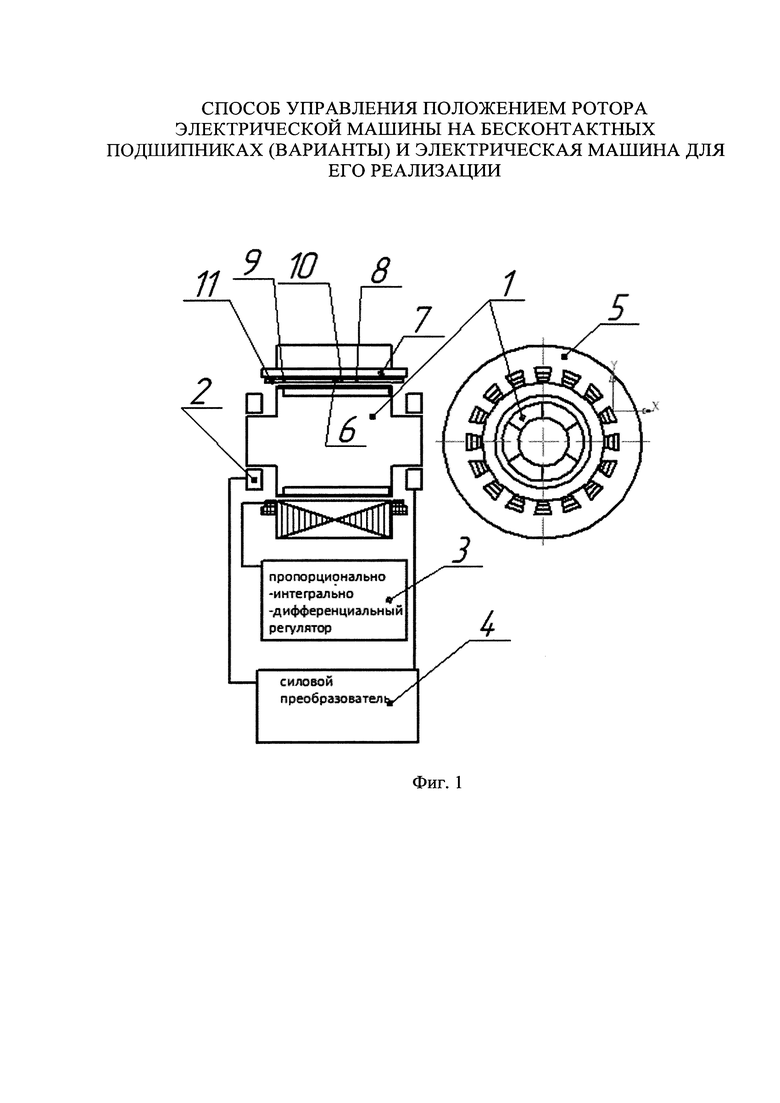
Существо изобретения поясняется чертежом. На фиг. 1 изображена электрическая машина.
Предложенное устройство содержит (фиг. 1) ротор 1 с установленными на нем бесконтактными подшипниками 2, пропорционально-интегрально-дифференциальный регулятор 3, силовой преобразователь 4, статор 5 с прорезью 6, в пазы которого уложены силовая обмотка 7, правая формирующая измерительный сигнал обмотка 8, левая формирующая измерительный сигнал обмотка 9, правая измерительная обмотка 10 и левая измерительная обмотка 11.
Электрическая машина работает следующим образом. При вращении ротора 1 в силовой обмотке 6 протекает ток, при этом по правой формирующей измерительный сигнал обмотке 8 и левой формирующей измерительный сигнал обмотке 9 пропускается высокочастотный ток, который создает первичное магнитное поле. Оно наводит в электропроводящих частях ротора вихревые токи, которые создают в правой 10 и левой 11 измерительных обмотках ЭДС, по величине данной ЭДС судят об пространственном положении ротора.
Далее сигнал от измерительных обмоток 10, 11 передается на силовой преобразователь 4, который посредством математических, вычислений в пропорционально-интегрально-дифференциальным регуляторе 3 либо усиливает, либо снижает управляющее воздействие на элементы управления бесконтактных подшипниковых опор.
Пример конкретной реализации способа по первому варианту
При смещении ротора 1 на 10% от номинального под действием центробежных сил, например, в высокоскоростном шпиндельном узле шлифовальной группы на магнитных подшипниках с ротором с постоянными магнитами SmCo возникает механическая нестабильность и колебания ротора и, как следствие, нарушение требований к обрабатываемой поверхности. При этом ЭДС в измерительной обмотке, создаваемая вторичным магнитным полем, за счет вихревых токов в электропроводящих частях ротора 1, изменяется с 5 мВ до 7 мВ на стороне уменьшения зазора и с 5 мВ до 3 мВ на стороне увеличения. Это изменение фиксируется и увеличивается посредством силового преобразователя 4 и пропорционально-интегрально-дифференциального регулятора 3, изготовленных, например, на микросхеме КР 140 УД 708, транзисторах КТ 829, КТ 315 Г, КТ 852, при этом напряжение на электромагнитах возрастает на 50%. Как следствие, сила притяжения электромагнитов увеличивается также в два раза и ротор 1 высокоскоростного шпиндельного узла шлифовальной группы под действием силы притяжения электромагнитов возвращается в исходное номинальное положение. Шпиндельный узел продолжает эксплуатироваться в стабильном состоянии, и поверхность обрабатывается в соответствии с необходимыми требованиями.
Пример конкретной реализации способа по второму варианту
При смещении ротора 1 на 10% от номинального под действием центробежных сил, например, в высокоскоростном шпиндельном узле шлифовальной группы на магнитных подшипниках с ротором 1 с постоянными магнитами SmCo возникает механическая нестабильность и колебание ротора и, как следствие, нарушение требований к обрабатываемой поверхности. При этом ЭДС в силовой обмотке, создаваемая вторичным магнитным полем, из-за вихревых токов в электропроводящих частях ротора 1 изменяется с 5 мВ до 7 мВ на стороне уменьшения зазора и с 5 мВ до 3 мВ на стороне увеличения. Это изменение фиксируется и увеличивается посредством силового преобразователя 4 и пропорционально-интегрально-дифференциального регулятора 3, изготовленных, например, на микросхеме КР 140 УД 708, транзисторах КТ 829, КТ 315 Г, КТ 852, при этом напряжение на электромагнитах возрастает на 50%. Как следствие, сила притяжения электромагнитов увеличивается также в два раза и ротор 1 высокоскоростного шпиндельного узла шлифовальной группы под действием силы притяжения электромагнитов возвращается в исходное номинальное положение. Шпиндельный узел продолжает эксплуатироваться в стабильном состоянии, и поверхность обрабатывается в соответствии с необходимыми требованиями.
Таким образом, осуществляется определение и управление положением ротора в бесконтактных подшипниках.
Итак, заявляемое изобретение позволяет повысить точность управления и надежность электрической машины с ротором на бесконтактных подшипниках, а также позволяет осуществить возможность применения во всех типах бесконтактных подшипников и расширить функциональные возможности за счет измерения положения ротора в осевом направлении.
В результате заявляемое изобретение обеспечивает расширение функциональных возможностей, благодаря возможности контроля угловых и осевых перекосов, а также повышение точности измерения положения ротора, благодаря использованию трех обмоток: силовой, измерительной и формирующей измерительный сигнал.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕССЕНСОРНОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ РОТОРА В БЕСКОНТАКТНЫХ ПОДШИПНИКАХ | 2014 |
|
RU2539690C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2014 |
|
RU2565232C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2374090C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2014 |
|
RU2600311C2 |
| БЕСКОЛЛЕКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2014 |
|
RU2563974C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ | 2012 |
|
RU2510877C1 |
| Способ регулирования многофазной электрической машины и система многофазной электрической машины для такого способа | 2021 |
|
RU2773000C1 |
| БЕСКОЛЛЕКТОРНАЯ УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 1998 |
|
RU2130682C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2009 |
|
RU2408972C1 |
| МОДУЛЬНАЯ УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 2009 |
|
RU2394339C1 |
Изобретение относится к области энергомашиностроения и может быть использовано в электромеханических преобразователях энергии на бесконтактных подшипниках. Технический результат - повышение точности управления и надежности электрической машины с ротором на бесконтактных подшипниках, возможность применения во всех типах бесконтактных подшипников и измерения перекосов ротора в осевом направлении. В способе управления положением ротора электрической машины в правой и левой формирующих измерительный сигнал обмотках, которые уложены в каждом пазу электрической машины, создают высокочастотное магнитное поле, частота которого больше частоты пятой гармоники электрической машины, при этом в электропроводящих элементах ротора наводят вихревые токи, которые создают вторичное магнитное поле, воздействие которого воспринимается измерительной обмоткой, и по измерению сигнала с измерительной правой и левой обмоток судят о пространственном положении ротора. Сигналы правой и левой обмоток должны быть симметричны, при несимметричности данных сигналов судят об угловых перекосах ротора. Информация об изменении пространственного положения ротора и угловой координате поступает в регулятор и силовой преобразователь, которые регулируют величину воздействия управляющих элементов. По второму варианту в способе управления положением ротора измеряют сигнал с обмоток электрической машины, по изменению которого судят о пространственном положении ротора. Информация об изменении пространственного положения ротора поступает в регулятор и силовой преобразователь, которые регулируют величину воздействия управляющих элементов. На электропроводящих элементах ротора электрической машины выполняют засечки. В электропроводящих элементах ротора под воздействием поля основной обмотки наводят вихревые токи, которые создают вторичное магнитное поле в силовой обмотке, воздействие которого воспринимается силовой обмоткой. Так как на электропроводящих элементах ротора нанесены засечки, то вторичное поле, воспринимаемое силовой обмоткой, искажено. По измерению искаженного магнитного поля с силовой обмотки судят о пространственном положении ротора. Информация об изменении пространственного положения ротора и угловой координате поступает в регулятор и силовой преобразователь, которые регулируют величину воздействия управляющих элементов. В статоре электрической машины выполнена прорезь. В пазах статора дополнительно уложены левая и правая измерительные обмотки, формирующие измерительный сигнал. Система управления содержит фильтры с возможностью фильтрации напряжения, наводимого ротором в измерительной обмотке. 3 н.п. ф-лы, 1 ил.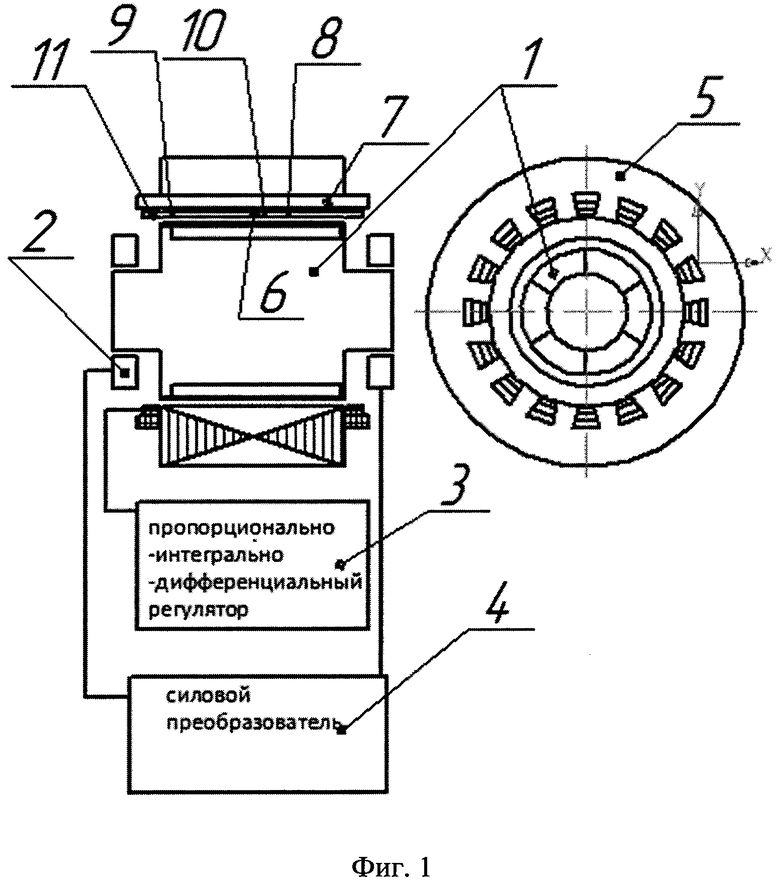
1. Способ управления положением ротора электрической машины на бесконтактных подшипниках, заключающийся в измерении сигнала с обмоток электрической машины, по изменению которого судят о пространственном положении ротора, при этом информация об изменении пространственного положения ротора поступает в регулятор и силовой преобразователь, которые регулируют величину воздействия управляющих элементов, отличающийся тем, что в правой и левой формирующих измерительный сигнал обмотках, которые уложены в каждом пазу электрической машины, создают высокочастотное магнитное поле, частота которого больше частоты пятой гармоники электрической машины, при этом в электропроводящих элементах ротора наводят вихревые токи, которые создают вторичное магнитное поле, воздействие которого воспринимается измерительной обмоткой, и по результату измерения сигнала с измерительной правой и левой обмоток судят о пространственном положении ротора, причем сигналы правой и левой обмоток обеспечивают симметричность, при несимметричности данных сигналов судят об угловых перекосах ротора, при этом информация об изменении пространственного положения ротора и угловой координаты поступает в регулятор и силовой преобразователь, которые регулируют величину воздействия управляющих элементов.
2. Способ управления положением ротора электрической машины на бесконтактных подшипниках, заключающийся в измерении сигнала с обмоток электрической машины, по изменению которого судят о пространственном положении ротора, при этом информация об изменении пространственного положения ротора поступает в регулятор и силовой преобразователь, которые регулируют величину воздействия управляющих элементов, отличающийся тем, что на электропроводящих элементах ротора электрической машины выполняют засечки, при этом в электропроводящих элементах ротора под воздействием поля основной обмотки наводят вихревые токи, создающие вторичное магнитное поле в силовой обмотке, воздействие которого воспринимается силовой обмоткой, за счет нанесенных на электропроводящих элементах ротора засечек вторичное поле, воспринимаемое силовой обмоткой, искажено и по измерению искаженного магнитного поля с силовой обмотки судят о пространственном положении ротора, а информация об изменении пространственного положения ротора и угловой координате поступает в регулятор и силовой преобразователь, которые регулируют величину воздействия управляющих элементов.
3. Электрическая машина, содержащая ротор с установленными на нем бесконтактными подшипниками, систему управления в виде пропорционально-интегрально-дифференциального регулятора, силовой преобразователь и статор, в пазах которого уложена силовая обмотка, отличающаяся тем, что в статоре выполнена прорезь, при этом в пазах статора дополнительно уложены левая и правая формирующие измерительный сигнал измерительные обмотки, а система управления содержит фильтры с возможностью фильтрации напряжения, наводимого ротором в измерительной обмотке.
| СПОСОБ БЕССЕНСОРНОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ РОТОРА В БЕСКОНТАКТНЫХ ПОДШИПНИКАХ | 2014 |
|
RU2539690C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2015 |
|
RU2589718C1 |
| СПОСОБЫ УПРАВЛЕНИЯ НЕУСТОЙЧИВОСТЬЮ В ГИДРОДИНАМИЧЕСКИХ ПОДШИПНИКАХ | 2005 |
|
RU2399803C2 |
| Способ получения активной железной массы для щелочных аккумуляторов | 1948 |
|
SU76516A1 |
| УСТАНОВКА ДЛЯ ЦЕНТРОБЕЖНОЙ ЗАЛИВКИ ЛИТЕЙНЫХ ФОРМ | 1996 |
|
RU2109596C1 |
| DE 3343186 A1, 05.06.1985 | |||
| JP 2002122138 A, 26.04.2002 | |||
| Сплав на основе теллура | 1976 |
|
SU569641A1 |
| СПОСОБ ОПТИМИЗАЦИИ РЕПАРАТИВНОГО ОСТЕОГЕНЕЗА | 2020 |
|
RU2738406C1 |
| WO 9707341 A1, 27.02.1997 | |||
| Указатель мест бурения скважин в железобетонной обделке подземного сооружения | 1986 |
|
SU1375825A1 |

