ОБЛАСТЬ ТЕХНИКИ
[0001] Данное изобретение относится к вспомогательным системам управления транспортным средством, в том числе к системам для предотвращения столкновений.
ИЗВЕСТНЫЙ УРОВЕНЬ ТЕХНИКИ
[0002] Известна технология обнаружения препятствия по ходу движения транспортного средства и электронного управления тормозом, который задействуется для того, чтобы избежать столкновения с твердым телом (препятствием) благодаря тормозному усилию, развиваемому тормозной системой, если существует риск столкновения транспортного средства с обнаруженным препятствием. Однако предотвращение столкновения при помощи только тормозного усилия приводит к разбросу параметров тормозного усилия, величина которого зависит от состояния дорожного покрытия и шин, а также содержит причину аварийного торможения. При этом известна технология предотвращения столкновения с препятствием посредством выполнения маневра (поворота), если применение торможения не позволяет избежать столкновения (см., например, Патент 1).
Уровень техники
Патентный документ
[0003] Патент 1: Публикация заявки на патент Японии №2001-247023 (JP-2001-247023 А)
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Проблема, решаемая данным изобретением
[0004] В том случае, если существуют несколько траекторий, которые позволяют избежать столкновения с препятствием в случае наличия препятствия по ходу движения транспортного средства, в особенности, если доступны траектории, позволяющие объехать препятствие справа или слева в направлении движения транспортного средства направо/налево, соответственно; при направлении поворота направо или налево, автоматически определяемом системой, направление поворота выбирается системой автоматического управления, как в вышеупомянутом случае, и направление поворота, которое выбирает водитель, могут не совпадать. Как следствие, водитель чувствует, что транспортное средство поворачивает в направлении, противоположном выбранному им самим направлению поворота. Такое управление транспортным средством не соответствует ожиданиям и намерениям водителя.
[0005] Данное изобретение было создано с учетом вышеупомянутых обстоятельств. Предметом изобретения является вспомогательная система управления транспортным средством, которая соответствует ожиданиям и намерениям водителя, в рамках системы, которая предлагает вспомогательное управление транспортным средством, в том числе для предотвращения столкновения транспортного средства с препятствием и т.п.
Средства решения проблемы
[0006] Для решения вышеупомянутой проблемы настоящее изобретение предусматривает возможность выбора траектории движения для предотвращения столкновения с препятствием при обнаружении препятствия по ходу движения транспортного средства, при этом управление в отношении поворота транспортного средства и управление в отношении торможения транспортного средства выполняются по мере необходимости и избирательно, в соответствии с относительным положением траектории движения по отношению к препятствию, в рамках системы, которая способствует предотвращению столкновения транспортного средства. Таким образом, настоящее изобретение основывается на том, что направление поворота, выбранное системой, и направление поворота, соответствующее намерению водителя, могут не совпадать, и в результате описанная выше система управления транспортным средством противоречит ожиданиям и намерениям водителя.
[0007] Говоря более конкретно, вспомогательная система управления транспортным средством, согласно настоящему изобретению, включает блок определения, который обнаруживает препятствие, возникающее по ходу движения транспортного средства, блок сбора и обработки данных, который находит, по меньшей мере одну траекторию объезда препятствия, которая позволяет избежать столкновения транспортного средства с препятствием, с учетом режима движения транспортного средства, если блок определения обнаруживает наличие препятствия, и блок управления вспомогательной системой управления транспортным средством, который выполняет вспомогательное управление транспортным средством для предотвращения столкновения транспортного средства с препятствием с учетом траектории объезда препятствия, или с учетом траектории объезда препятствия, найденной блоком сбора и обработки данных. Кроме того, блок управления вспомогательной системой управления транспортным средством способен управлять тормозной системой транспортного средства без изменения направления движения транспортного средства, если траектории объезда препятствия, которые были найдены блоком сбора и обработки данных, проходят справа и слева от препятствия при направлении движения транспортного средства направо/налево.
[0008] Во вспомогательной системе управления транспортным средством, согласно настоящему изобретению, если блок определения обнаруживает наличие препятствия в направлении движения транспортного средства, блок сбора и обработки данных находит по крайней мере одну траекторию объезда препятствия. Эти траектории объезда препятствия представляют собой траектории движения транспортного средства, по которым транспортное средство может двигаться, чтобы избежать столкновения с обнаруженным препятствием. Они рассчитываются на основании информации о режиме движения транспортного средства, например, скорости транспортного средства, поперечной составляющей ускорения транспортного средства и т.п. Здесь необходимо уточнить, что при расчете траектории объезда препятствия не предъявляется никаких особых требований к конкретным действиям по управлению поворотом транспортного средства и управлению торможением транспортного средства, которые выполняются для движения по заданной траектории как по найденной целевой траектории для предотвращения столкновения. Однако, если поведение транспортного средства при выполнении поворота или при снижении скорости в результате выполнения торможения должно управляться автоматически согласно заданному режиму и в соответствии с заданной целью и т.п., то целевые траектории объезда препятствия могут прокладываться, исходя из предпосылки, что к управлению поворотом транспортного средства и к управлению торможением транспортного средства предъявляются некоторые требования в соответствии с поставленной задачей.
[0009] Кроме того, целевые траектории объезда препятствия, найденные блоком сбора и обработки данных, не обязательно должны представлять из себя линейные траектории; они также могут быть сформированные в виде полосы траектории, которые прокладываются в зонах, в которых можно избежать столкновения транспортного средства с препятствием, выполнив поворот, или это могут быть зоны, в которых транспортное средство не пересечется с препятствием. Соответственно, в случае, если блок сбора и обработки данных находит траектории объезда препятствия, по крайней мере одна траектория объезда препятствия, при условии наличия достаточной дистанции до препятствия, позволяющей избежать столкновения, может быть проложена справа от препятствия или слева от препятствия, либо с обеих сторон.
[0010] Кроме того, во вспомогательной системе управления транспортным средством, согласно настоящему изобретению, блок управления вспомогательной системой управления транспортным средством выполняет вспомогательное управление транспортным средством для предотвращения столкновения, а именно поворот транспортного средства и торможение транспортного средства, следуя траектории объезда препятствия, которая была проложена описанным выше способом. Здесь необходимо уточнить, что в случае, если траектории объезда препятствия могут быть проложены справа и слева от препятствия в направлении движения транспортного средства направо/налево, а именно, в случае, если траектория, по которой транспортное средство объезжает препятствие справа, выполнив соответственно поворот, и траектория, по которой транспортное средство объезжает препятствие слева, выполнив соответственно поворот, включаются в возможные траектории объезда препятствия, проложенные для того, чтобы избежать столкновения транспортного средства с препятствием, столкновения с препятствием можно избежать независимо от того, по какой именно траектории будет двигаться транспортное средство. В случае, если вспомогательная система управления транспортным средством выбирает траекторию с одной стороны препятствия и пытается выполнить поворот, а водитель транспортного средства, со своей стороны, выбирает траекторию объезда с другой стороны и пытается выполнить поворот в ходе собственного водительского маневра, действия системы и маневр водителя вступают в конфликт друг с другом. В результате, вспомогательное управление транспортным средством вступает в противоречие с намерением водителя.
[0011] Кроме того, согласно настоящему изобретению, во-первых, в случае, если траектории объезда препятствия могут быть проложены справа и слева от препятствия в направлении движения транспортного средства направо/налево, блок управления вспомогательной системой управления транспортным средством в первую очередь выполняет торможение транспортного средства без выполнения поворота транспортного средства. Таким образом, столкновения с препятствием можно избежать без изменения направления движения транспортного средства. Как следствие, можно устранить неудобство, которое испытывает водитель, в результате выбора разных направлений поворота для предотвращения столкновения с препятствием, как описано выше. Отметим также, что если водитель задействует рулевое управление, когда блок управления вспомогательной системой управления транспортным средством выполняет торможение, направление движения транспортного средства меняется в зависимости от направления поворота руля, и столкновения с препятствием можно избежать. Если водитель не задействует рулевое направление, транспортное средство снижает скорость в результате выполнения торможения блоком управления вспомогательной системой управления транспортным средством и может остановиться перед препятствием до того, как произошло столкновение, или же, в случае столкновения с препятствием, снизить скорость движения.
[0012] Здесь необходимо уточнить, что в вышеупомянутой вспомогательной системе управления транспортным средством, если траектория объезда препятствия, найденная блоком сбора и обработки данных, проходит справа или слева от препятствия в направлении движения транспортного средства направо/налево, блоку управления вспомогательной системой управления транспортным средством может быть разрешено выполнение поворота транспортного средства, но диапазон поворота транспортного средства, выполняемый блоком управления вспомогательной системой управления транспортным средством, может быть ограничен таким образом, чтобы не превышать заданного диапазона поворота, который может быть выполнен в результате осуществляемого водителем маневрирования. Если траектория объезда препятствия пролегает справа или слева от препятствия в направлении движения транспортного средства направо/налево, направление поворота, выбираемое для предотвращения столкновения с препятствием, будет ограничено. Иными словами, поворот в одном из направлений, позволяющем избежать столкновения, выполняется только при наличии такой возможности. Таким образом, в подобных условиях, даже если блоку управления вспомогательной системой управления транспортным средством разрешено выполнение поворота транспортного средства, управление со стороны системы и осуществляемое водителем маневрирование не вступают друг с другом в конфликт, и в результате не допускается выполнение вспомогательного управления транспортным средством, если оно противоречит намерению водителя.
[0013] Отметим также, что в подобном случае диапазон поворота транспортного средства, выполняемого блоком управления вспомогательной системой управления транспортным средством, ограничен таким образом, чтобы не выходить за пределы диапазона поворота, который определяется на основе диапазона поворота, который может быть выполнен в результате поворота руля водителем. Диапазон поворота, выполняемый блоком управления вспомогательной системой управления транспортным средством, ограничен таким образом, чтобы не выходить за пределы заданного диапазона поворота, и если при этом водитель задействует рулевое управление так, как он сам или она сама считает нужным, в то время, когда блок управления вспомогательной системой управления транспортным средством выполняет вспомогательное управление транспортным средством, диапазон поворота, осуществляемый водителем при помощи рулевого управления, будет больше диапазона поворота, выполняемого вспомогательной системой управления транспортным средством. Таким образом, при управлении транспортным средством приоритет, в конечном итоге, отдается рулевому управлению транспортным средством со стороны водителя. Таким образом, блок управления вспомогательной системой управления транспортным средством выполняет поворот таким образом, что поворот, выполняемый водителем, может корректировать поворот, выполняемый системой, и вспомогательное управление транспортным средством будет при этом соответствовать ожиданиям и намерениям водителя. Отметим также, что под диапазоном поворота может пониматься любой произвольный параметр (такой, например, как угловая скорость, боковая составляющая ускорения и т.п.), который характеризует поворот транспортного средства и связан с выполнением поворота.
[0014] Здесь необходимо уточнить, что вышеупомянутая вспомогательная система управления транспортным средством может дополнительно включать блок принятия решения, который принимает решение относительного того, можно или нет избежать столкновения с препятствием в ограниченном режиме, в котором диапазон поворота транспортного средства ограничен блоком управления вспомогательной системой управления транспортным средством таким образом, чтобы не превышать заданного диапазона поворота. Кроме того, если блок принятия решения принимает решение, что столкновения транспортного средства с препятствием не возможно избежать, блок управления вспомогательной системой управления транспортным средством принимает решение относительно того, разрешено или нет блоку управления вспомогательной системой управления транспортным средством выполнить поворот, с учетом возможной скорости столкновения транспортного средства в случае, если транспортное средство столкнется с препятствием, когда блок управления вспомогательной системой управления транспортным средством выполняет поворот и торможение в данном ограниченном режиме.
[0015] Решение, которое принимается указанным блоком принятия решения - это решение относительно того, возможно ли избежать столкновения с учетом режима движения, в котором ограничен диапазон поворота транспортного средства, выполняемого блоком управления вспомогательной системой управления транспортным средством, а именно, в том объеме, в котором вспомогательное управление транспортным средством может оказываться для того, чтобы водитель чувствовал уверенность в своих действиях. Здесь необходимо уточнить, что возможная скорость столкновения представляет собой скорость транспортного средства в случае, если транспортное средство все-таки столкнется с препятствием, даже если выполняется поворот с целью предотвращения столкновения и применяется торможение для снижения скорости транспортного средства в вышеупомянутом ограниченном режиме. Из соображений безопасности предпочтительно, чтобы скорость транспортного средства в случае столкновения была погашена как можно больше, благодаря торможению, наряду с попыткой как можно дольше отсрочить столкновение с препятствием благодаря выполнению поворота, даже, несмотря на то, что столкновения уже не избежать. С другой стороны, для выполнения транспортным средством поворота необходима поперечная сила. В связи с этим тормозное усилие, которое применяется для снижения скорости транспортного средства, физически уменьшается во время выполнения поворота. Соответственно, с точки зрения снижения скорости транспортного средства в случае столкновения предпочтительно принять решение, разрешено или нет блоку управления вспомогательной системой управления транспортным средством выполнять поворот транспортного средства для изменения направления движения транспортного средства, с учетом того, до какого предела можно снизить возможную скорость транспортного средства при столкновении.
[0016] В качестве примера управления поворотом, блок управления вспомогательной системой управления транспортным средством сначала рассчитывает меньшую возможную скорость столкновения в случае, если транспортное средство столкнется с препятствием, когда оно управляется таким образом, что прилагается максимальное тормозное усилие для снижения скорости транспортного средства, если при этом блок управления вспомогательной системой управления транспортным средством не выполняет поворот транспортного средства. Упомянутая выше меньшая возможная скорость столкновения представляет собой скорость транспортного средства в случае, если транспортное средство не совершает поворот в сторону от препятствия, и если при торможении транспортного средства действует максимальная сила трения, дополняющая тормозное усилие. Кроме того, если возможная скорость столкновения окажется ниже меньшей возможной скорости столкновения, что определяется путем сравнения возможной скорости столкновения и меньшей возможной скорости столкновения, может выполняться управление торможением транспортного средства наряду с управлением поворотом транспортного средства. Таким образом, даже если столкновения транспортного средства с препятствием не возможно избежать, скорость транспортного средства в случае столкновения может быть максимально снижена в результате комбинации поворота и снижения скорости при помощи торможения.
[0017] С другой стороны, если возможная скорость столкновения не будет ниже меньшей возможной скорости столкновения, что определяется путем сравнения возможной скорости столкновения и меньшей возможной скорости столкновения, может выполняться только управление торможением транспортного средства без управления поворотом транспортного средства. Таким образом, часть силы трения используется для того, чтобы увеличить тормозное усилие для снижения скорости транспортного средства вместо того, чтобы использоваться в качестве поперечной силы при выполнении поворота. Даже если столкновения транспортного средства с препятствием невозможно избежать, скорость транспортного средства в случае столкновения может быть максимально снижена.
[0018] Отметим также, что в случае, когда упомянутая вспомогательная система управления транспортным средством дополнительно включает блок принятия решения, который принимает решение относительно того, можно ли избежать столкновения транспортного средства с препятствием в ограниченном режиме, в котором диапазон поворота транспортного средства, выполняемый блоком управления вспомогательной системой управления транспортным средством, ограничен таким образом, чтобы не превышать заданного диапазона поворота, если блок принятия решения принимает решение, что столкновения транспортного средства с препятствием можно избежать, блок управления вспомогательной системой управления транспортным средством может выполнить управление торможением транспортного средства, а также управление поворотом транспортного средства. То есть, если будет принято решение о возможности предотвращения столкновения с препятствием, могут выполняться управление поворотом транспортного средства и управление торможением транспортного средства. Таким образом, сила трения будет рационально распределяться между поперечной силой, необходимой для выполнения поворота, и тормозящим усилием, необходимым для снижения скорости, и тогда столкновения с препятствием можно будет избежать.
Преимущества изобретения
[0019] Предметом изобретения является вспомогательная система управления транспортным средством, которая обеспечивает соответствие поведения системы ожиданиям и намерениям водителя и обеспечивает вспомогательное управление транспортным средством для предотвращения столкновения транспортного средства с препятствием и т.п.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0020] ФИГ. 1 представляет собой схему вспомогательной системы управления транспортным средством, согласно настоящему изобретению.
ФИГ. 2 представляет собой изображение диапазона возможных траекторий движения транспортного средства.
ФИГ. 3 представляет собой блок-схему процесса вспомогательного управления транспортным средством, который выполняется вспомогательной системой управления транспортным средством, показанной на ФИГ. 1.
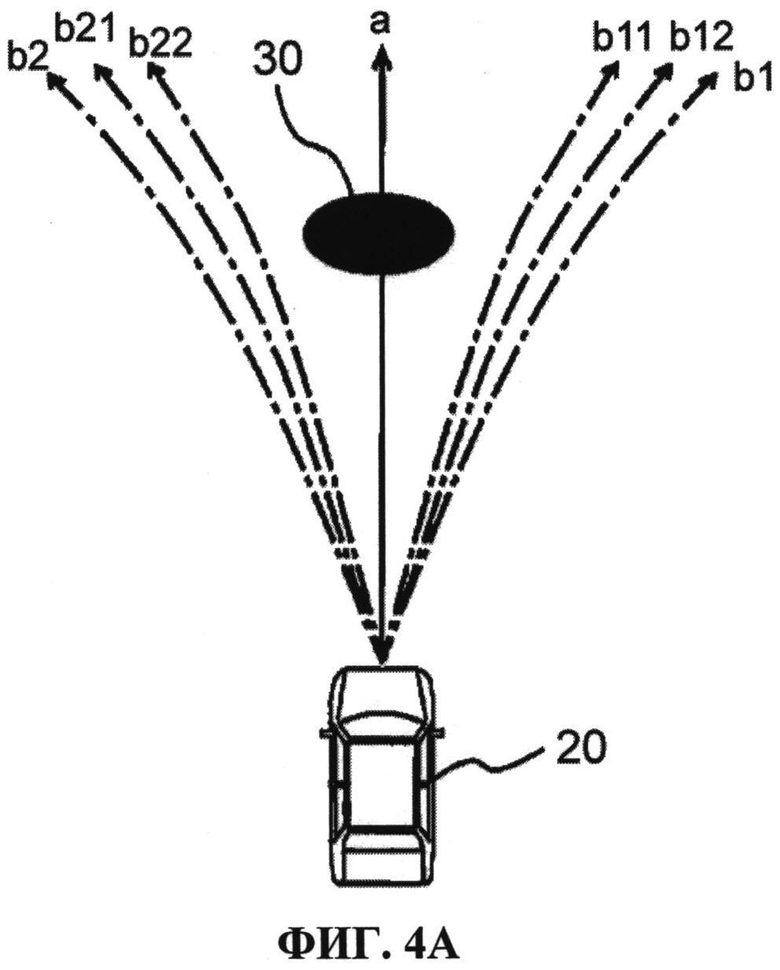
ФИГ. 4А представляет собой первый вариант целевых траекторий объезда препятствия, по которым может следовать транспортное средство, чтобы избежать столкновения с препятствием, находящимся впереди по ходу движения транспортного средства.
ФИГ. 4В представляет собой второй вариант целевых траекторий объезда препятствия, по которым может следовать транспортное средство, чтобы избежать столкновения с препятствием, находящимся впереди по ходу движения транспортного средства.
ФИГ. 5 представляет собой блок-схему второго варианта процесса вспомогательного управления транспортным средством, который выполняется вспомогательной системой управления транспортным средством, показанной на ФИГ. 1.
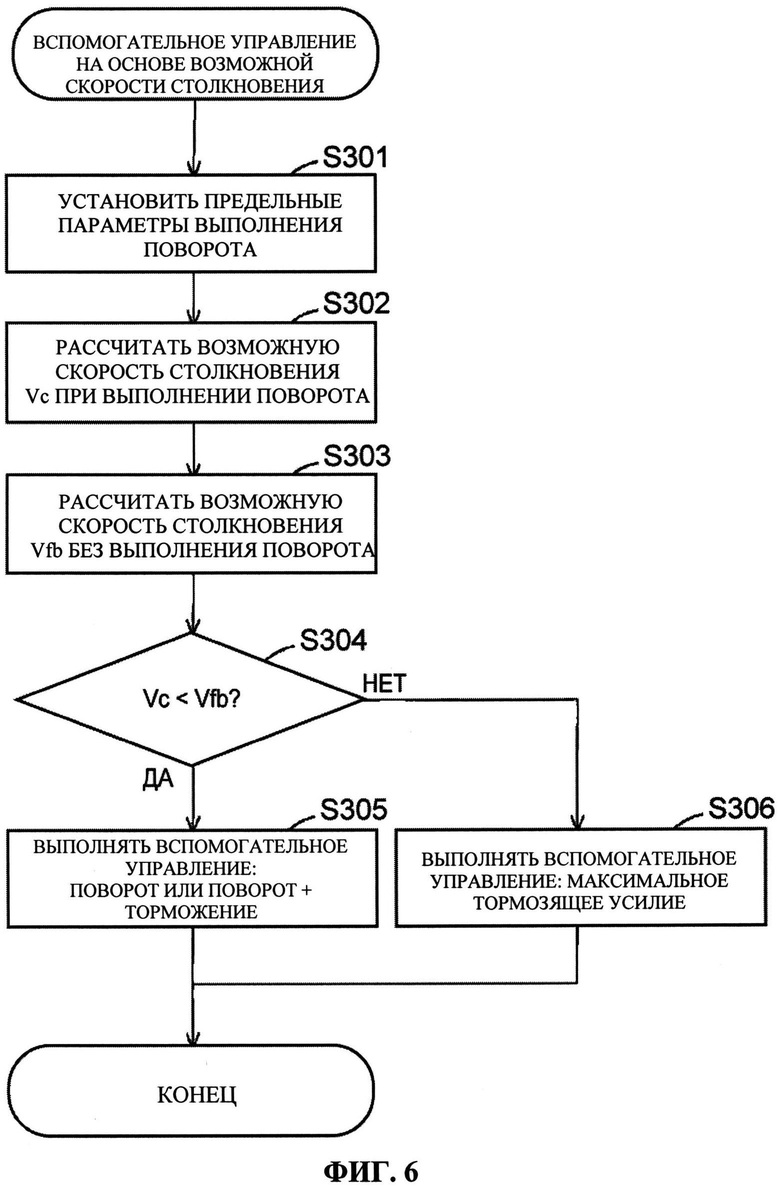
ФИГ. 6 представляет собой блок-схему процесса, который выполняется вспомогательной системой управления транспортным средством, в соответствии с ФИГ. 5, основанный на возможной скорости столкновения.
ФИГ. 7 представляет собой третий вариант целевых траекторий объезда препятствия, по которым может следовать транспортное средство, чтобы избежать столкновения с препятствием, находящимся впереди по ходу движения транспортного средства.
ФИГ. 8 представляет собой блок-схему третьего варианта процесса вспомогательного управления транспортным средством, который выполняется вспомогательной системой управления транспортным средством, в соответствии с ФИГ. 1.
ПРИМЕРЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0021] Конкретные варианты осуществления изобретения будут описаны далее со ссылками на чертежи. В данном случае рассматривается пример осуществления, в котором изобретение применимо в системе, которая принимает решение относительно движения транспортного средства по дороге, или относительно наличия препятствия, или помехи и осуществляющая вспомогательное управление транспортным средством, чтобы не допустить отклонения от траектории движения по дороге, относительного которой было принято решение, или столкновения с препятствием, относительного которого было выполнено определение, или для того, чтобы смягчить последствия столкновения. Кроме того, каждая из конфигураций, описанных в представленных далее вариантах осуществления изобретения, ссылается на один из вариантов осуществления изобретения, но не ограничивает этим конфигурацию изобретения.
[0022] 〈Первый вариант осуществления изобретения〉
Далее будет описан первый вариант осуществления настоящего изобретения. ФИГ. 1 представляет собой функциональную блок-схему, которая изображает конфигурацию вспомогательной системы управления транспортным средством, согласно настоящему изобретению. Как показано на ФИГ. 1, транспортное средство оборудовано электронным блоком управления 1 (блок ЭБУ), используемым для осуществления вспомогательного управления транспортным средством.
[0023] Блок ЭБУ 1 представляет собой электронный блок управления, включающий процессор (ЦПУ), запоминающее устройство (ПЗУ), резервную оперативную память (ОЗУ), интерфейс ввода/вывода и т.п. Различные датчики, такие, например, как блок 2 идентификации окружающего пространства, датчик 3 угловой скорости рыскания, датчики 4 скорости вращения колес, датчик 5 ускорения, датчик 6 торможения, датчик 7 педали акселератора, датчик 8 угла поворота рулевого колеса, датчик 9 крутящего момента рулевого колеса и т.п., электрически связаны с блоком ЭБУ 1, и выходные сигналы этих датчиков поступают в блок ЭБУ 1.
[0024] Блок 2 идентификации окружающего пространства включает по крайней мере один из измерительных приборов, таких как лазерную систему идентификации изображений и дальномерный блок (LIDAR), лазерный дальномер (LRF), радар миллиметрового диапазона, стереоскопическую камеру и т.п., и получает данные о положении транспортного средства 20 по отношению к препятствию 30, которое находится недалеко от транспортного средства (например, относительное расстояние и относительный угол). Отметим также, что получение информации о препятствии 30 блоком 2 идентификации окружающего пространства подробно описано в известном уровне техники, и, следовательно, в настоящем описании эти подробности приводиться не будут. Датчик 3 угловой скорости рыскания устанавливается, например, на кузове транспортного средства 20 и выдает электрический сигнал, который соотносится с угловой скоростью рыскания (поворота) транспортного средства 20. Датчики 4 скорости вращения колес представляют собой датчики, которые устанавливаются на колеса транспортного средства 20 и выдают электрические сигналы, которые соотносятся со скоростью движения транспортного средства (скоростью транспортного средства). Датчик 5 ускорения выдает электрический сигнал, который соотносится с ускорением (продольное ускорение), действующим в продольном направлении движения транспортного средства 20, и с ускорением (поперечной составляющей ускорения), которое действует в направлении, поперечном движению транспортного средства 20. Датчик 6 торможения устанавливается, например, на педаль тормоза в салоне транспортного средства и выдает электрический сигнал, который соотносится с крутящим моментом (усилием нажатия), действующим на педаль тормоза. Датчик 7 педали акселератора устанавливается, например, на педаль акселератора в салоне транспортного средства и выдает электрический сигнал, который соотносится с крутящим моментом (усилием нажатия), действующим на педаль акселератора. Датчик 8 угла поворота рулевого колеса устанавливается, например, на рулевую тягу, которая соединяется с рулевым колесом в салоне транспортного средства и выдает электрический сигнал, который соотносится с углом поворота (угол поворота) по отношению к среднему положению рулевого колеса. Датчик 9 крутящего момента рулевого колеса устанавливается на рулевую тягу и выдает электрический сигнал, который соотносится с крутящим моментом (управляющим моментом), который передается на рулевое колесо.
[0025] Кроме того, различные устройства, такие как электрический усилитель руля (ЭУР) 10, электронное тормозное устройство (ЭТУ) 11 и т.п. соединяются с блоком ЭБУ 1. Устройство ЭУР 10 представляет собой устройство, которое усиливает крутящий момент рулевого колеса при помощи момента, создаваемого электрическим мотором. Устройство ЭТУ 11 представляет собой устройство, которое электрически регулирует гидравлическое давление масла (давление тормозной жидкости) тормозной системы фрикционного типа, которой оборудовано каждое колесо.
[0026] Во вспомогательной системе управления транспортным средством, показанной на ФИГ. 1, которая сконфигурирована как описано выше, блок ЭБУ 1 осуществляет электронное управление устройствами ЭУР 10 и ЭТУ 11 на основе данных, полученных от различных упомянутых ранее датчиков, которые соединяются с блоком ЭБУ 1, осуществляя вспомогательное управление транспортным средством для предотвращения столкновения с препятствием и т.п. Иными словами, для управления различными устройствами, применяемыми для предотвращения столкновения и т.п. с использованием выходных сигналов различных упомянутых выше датчиков, блок ЭБУ 1 обладает функциями, которые соответствуют функциональным блокам, показанным на ФИГ. 1. То есть, блок ЭБУ 1 включает блок 100 определения траектории движения по дороге, блок 101 расчета целевой траектории объезда препятствия и блок 102 управления вспомогательной системой управления транспортным средством.
[0027] Блок 100 определения траектории движения по дороге генерирует информацию о дороге (траектории движения по дороге), по которой будет следовать транспортное средство 20, на основе информации, полученной от блока 2 идентификации окружающего пространства. Например, блок 100 определения траектории движения по дороге получает информацию о пространственных координатах указателей, обозначающих препятствия 30, которые могут стать помехой на пути движения транспортного средства 20, и границах полос движения (например, знаках дорожной разметки, таких, как желтые линии, белые линии, которые обозначают границы полос движения, бордюрный камень вдоль края полос движения, ограждения, канавы, стены, препятствия 30, например, столбы и т.п.), и о положении транспортного средства 20 по отношению к этим препятствиям 30 и границам полос (расстояние, угол поворота и т.п.), в системе координат, исходной точкой которой является текущее положение транспортного средства 20. Отметим также, что согласно настоящему изобретению блок 100 определения траектории движения по дороге эквивалентен блоку идентификации.
[0028] Согласно настоящему изобретению, блок 101 расчета целевой траектории объезда препятствия для предотвращения столкновения представляет собой блок сбора и обработки данных и прокладывает расчетную траекторию объезда препятствия для предотвращения столкновения, по которой может следовать транспортное средство 20, чтобы избежать столкновения с препятствием 30, которое обнаруживает блок 100 определения траектории движения по дороге в системе координат, построенной блоком 100 определения траектории движения по дороге. Эта расчетная траектория объезда препятствия представляет собой траекторию, которая прокладывается с учетом режима движения транспортного средства 20, например, скорости транспортного средства 20, поперечной составляющей ускорения транспортного средства 20 и т.п. В частности, как показано на ФИГ. 2, блок 101 расчета целевой траектории объезда препятствия получает данные о текущей поперечной составляющей ускорения Gy0 транспортного средства 20 от выходного сигнала датчика ускорения 5 и прокладывает траекторию, по которой, как предполагается, будет следовать транспортное средство 20, если транспортное средство 20 будет двигаться с сохранением текущей поперечной составляющей ускорения Gy0. Затем блок 101 расчета целевой траектории объезда препятствия прокладывает траекторию b1, по которой, как предполагается, будет двигаться транспортное средство 20 в случае, если максимальное изменение ΔGy поперечной силы, которое позволяет транспортному средству 20 совершить безопасный поворот на текущей скорости транспортного средства 20, добавится к боковой составляющей ускорения Gy0 транспортного средства 20, и прокладывает траекторию b2, по которой, как предполагается, будет двигаться транспортное средство 20 в случае, если максимальное изменение ΔGy, напротив, будет вычитаться из текущей боковой составляющей ускорения Gy0 транспортного средства 20. Максимальное изменение ΔGy может быть соответствующим образом задано с учетом факторов, влияющих на безопасное движение транспортного средства, а именно с учетом его конструкции, использования водителем рулевого управления и т.п.
[0029] Что касается более конкретного определения траекторий b1 и b2, блок 101 расчета целевой траектории объезда препятствия может рассчитать радиус поворота R транспортного средства 20 на основании значения, полученного путем прибавления максимального изменения ΔGy к текущей боковой составляющей ускорения Gy0 или вычитания максимального изменения ΔGy из текущей боковой составляющей ускорения Gy0, и проложить траектории b1 и b2 на основании рассчитанного радиуса поворота R. Отметим также, что радиус поворота R может быть получен путем деления скорости транспортного средства V на угловую скорость рыскания γ(R=V/γ), а угловая скорость рыскания γ, может быть получена путем деления поперечной составляющей ускорения Gy на скорость транспортного средства V (γ=Gy/V). Очевидно, что величина, полученная датчиком 3 угловой скорости рыскания, может быть использована в качестве угловой скорости рыскания γ. Затем блок 101 расчета целевой траектории объезда препятствия прокладывает траекторию b0 на тот случай, если поперечная составляющая ускорения будет меняться постепенно в определенном диапазоне (диапазоне возможных траекторий движения) от возможной траектории b1 до возможной траектории b2. Отметим также, что можно точно задать ширину разброса определенного диапазона этой поперечной составляющей ускорения. Затем, траектория, позволяющая транспортному средству 20 избежать столкновения с препятствием 30, объехав его благодаря выполнению поворота, обозначается как траектория объезда препятствия, с учетом степени пересечения между препятствием 30, находящимся впереди по направлению движения транспортного средства 20, и траекториями b1 и b2, а также множеством траекторий b0, которые пролегают между ними.
[0030] Далее рассмотрим блок 102 управления вспомогательной системой управления транспортным средством, который, согласно настоящему изобретению, представляет собой блок управления вспомогательной системой управления транспортным средством, который выполняет вспомогательное управление транспортным средством для предотвращения столкновения с препятствием 30 и смягчения воздействия/повреждения в случае столкновения, благодаря использованию ЭУР 10, ЭТУ 11 и т.п., на основе информации, полученной блоком 100 определения траектории движения по дороге, и траектории объезда препятствия, проложенной блоком 101 расчета целевой траектории объезда препятствия. Более конкретно, блок 102 управления вспомогательной системой управления транспортным средством рассчитывает регулируемые параметры ЭУР 10 и ЭТУ 11 и управляет работой ЭУР 10 и ЭТУ 11 в соответствии с рассчитанными регулируемыми параметрами. Например, блок 102 управления вспомогательной системой управления транспортным средством рассчитывает целевую угловую скорость рыскания, которая необходима для предотвращения столкновения транспортного средства 20 с препятствием 30, и определяет регулируемый параметр (крутящий момент) ЭУР 10 и регулируемый параметр (давление тормозной жидкости) ЭТУ 11, таким образом, чтобы реальная угловая скорость рыскания транспортного средства 20 (выходной сигнал датчика 3 угловой скорости рыскания) совпала с целевой угловой скоростью рыскания. В этом случае соотношение целевой угловой скорости рыскания и крутящего момента и соотношение целевой угловой скорости рыскания и давления тормозной жидкости могут быть заданы заранее.
[0031] Отметим также, что способ снижения скорости транспортного средства не ограничен использованием фрикционной тормозной системы ЭТУ 11. Также может применяться способ преобразования (регенерации) кинетической энергии транспортного средства в электрическую энергию, или способ изменения передаточного числа трансмиссии для усиления торможения двигателя. Кроме того, способ изменения угловой скорости рыскания транспортного средства не ограничен способом изменения угла поворота рулевого колеса с помощью ЭУР 10. Кроме того, может быть использован способ создания разного давления тормозной жидкости на правых и левых колесах транспортного средства 20.
[0032] Далее процесс предотвращения столкновения вспомогательной системой управления транспортным средством, согласно данному варианту осуществления изобретения, будет описан со ссылкой на ФИГ. 3. Процесс, показанный на ФИГ. 3 представляет собой процесс, который многократно выполняется блоком ЭБУ 1 и предварительно записывается в качестве управляющей программы в ПЗУ или аналогичной программы блока ЭБУ 1. В первую очередь на этапе S101 собирается информация о дороге, по которой будет двигаться транспортное средство 20, на основе выходного сигнала блока 2 идентификации окружающего пространства. Таким образом, блок ЭБУ 1 получает информацию о пространственных координатах указателей, обозначающих препятствие 30, которое может стать помехой для транспортного средства 20, о границах полос движения и о положении транспортного средства 20 по отношению к препятствию 30 и к границам полос движения в системе координат, исходной точкой которой является текущее положение транспортного средства 20. После завершения этапа S101 процедура переходит к этапу S102. Затем на этапе S102 блок ЭБУ 1 принимает решение, на основе информации, полученной на этапе S101, о наличии или отсутствии препятствия 30, или помехи, впереди на пути движения транспортного средства 20. «Путь» в данном контексте означает траекторию (например, траекторию, показанную на ФИГ. 2), по которой, предположительно, будет двигаться транспортное средство 20 в том случае, если транспортное средство 20 продолжит движение с сохранением текущей поперечной составляющей ускорения Gy0. Если препятствие 30 находится на этой предполагаемой траектории, или если препятствие 30 находится на некотором расстоянии от этой траектории, принимается решение, что препятствие 30 находится впереди по направлению движения транспортного средства 20. Если на этапе S102 принято положительное решение, процесс переходит к выполнению этапа S103. Если на этапе S102 принято отрицательное решение, блок ЭБУ 1 временно прекращает выполнение текущего процесса. Действия, выполняемые на указанных этапах S101 и S102, аналогичны действиям, выполняемым вышеупомянутым блоком 100 определения траектории движения по дороге.
[0033] Впоследствии на этапе S103 поперечную составляющую ускорения Gy0 транспортного средства 20 в тот момент считывают с датчика ускорения 5 вышеупомянутым блоком 101 расчета целевой траектории объезда препятствия, и максимальное изменение ΔGy вышеупомянутой поперечной составляющей ускорения добавляют к боковой составляющей ускорения Gy0 или вычитают из нее, в результате чего рассчитывают диапазон возможных траекторий движения, по которым будет двигаться транспортное средство 20, и траекторию движения, которая позволяет избежать пересечения из этого диапазона возможных траекторий движения с препятствием 30, рассчитывают в качестве траектории объезда препятствия. Эта траектория объезда препятствия аналогична траектории объезда препятствия по настоящему изобретению. После завершения этапа S103 процесс переходит к выполнению этапа S104.
[0034] На этапе S104 блок 102 управления вспомогательной системой управления транспортным средством определяет, существуют ли траектории объезда препятствия, двигаясь по которым транспортное средство 20 может избежать столкновения с обнаруженным препятствием 30, справа и слева от препятствия 30, в направлении движения транспортного средства 20 направо/налево. Такое определение принимается для того, чтобы определить наличие хотя бы одной траектории объезда препятствия как с правой, так и с левой стороны по отношению к препятствию 30 в направлении движения транспортного средства 20 направо/налево (диапазона направлений движения). Даже в том случае, когда существуют несколько траекторий объезда препятствия, если они пролегают только на одной правой или левой сторон по отношению к препятствию 30 в направлении движения транспортного средства 20 направо/налево, на этапе S104 принимается отрицательное решение. Например, как показано на ФИГ. 4А, если препятствие 30 расположено приблизительно на пути движения транспортного средства 20, и ширина препятствия 30 относительно невелика, есть траектории b11 и b12 в дополнение к траектории b1 на стороне траектории b1, которая соответствует максимальному изменению +ΔGy0 поперечной составляющей ускорения, в качестве траекторий объезда препятствия, и, кроме того, есть траектории b21 и b22, в дополнение к траектории b2 на стороне траектории b2, которая соответствует максимальному изменению -ΔGy поперечной составляющей ускорения. Таким образом, в рамках режима, показанного на ФИГ. 4А, траектории b1, b11 и b12 в качестве траекторий объезда препятствия доступны справа от транспортного средства 20, а траектории b2, b21 и b22 в качестве траекторий объезда препятствия проходят слева от транспортного средства 20. Соответственно, в подобных условиях доступны траектории объезда препятствия справа и слева в направлении движения транспортного средства 20 направо/налево, и на этапе S104 принимается положительное решение.
[0035] Кроме того, как показано на ФИГ. 4В, если препятствия 30 расположены на пути движения транспортного средства 20 близко с левой стороны транспортного средства 20 и в удалении с правой стороны транспортного средства 20 и имеют относительно большую ширину, то траектории b11 и b12 доступны в дополнение к траектории b1 на стороне траектории b1, что соответствует максимальному изменению +ΔGy0 боковой составляющей ускорения, в качестве траекторий объезда препятствия. Вместе с тем, отсутствует траектория объезда препятствия на стороне траектории b2, которая соответствует максимальному изменению -ΔGy боковой составляющей ускорения. Далее объясняются причины такого отсутствия. Поскольку препятствия 30 находятся близко с левой стороны транспортного средства 20 и в удалении с правой стороны транспортного средства 20, препятствия 30 пересекаются с траекторией b2, даже если боковая составляющая ускорения изменяется на максимальную величину ΔGy0 в сторону уменьшения, и транспортное средство 20 двигается по траектории b2. В случае, как показано на ФИГ. 4В, траектории объезда препятствия могут быть проложены только с правой стороны по отношению к направлению движения транспортного средства 20 со стороны препятствия 30, и, таким образом, на этапе S104 принимается отрицательное решение. Отметим также, если количество траекторий объезда препятствия уменьшается, и остается только траектория b1, или даже если доступно больше траекторий, но только с правой стороны транспортного средства 20 относительно препятствия 30, результат решения остается неизменным.
[0036] Подводя итог, отметим, что если результат решения на этапе S104 является положительным в рамках данного процесса, осуществляется переход к этапу S105, а если на этапе S104 в рамках данного процесса принимается отрицательное решение, выполняется переход к этапу S106. Здесь необходимо уточнить, что на этапе S105 блок 102 управления вспомогательной системой управления транспортным средством выполняет процесс вспомогательного управления транспортным средством для предотвращения столкновения транспортного средства 20 с препятствием 30. Данный процесс подробно описан со ссылкой на ФИГ. 4А. Как описано выше, в условиях, показанных на ФИГ. 4А, имеются траектории объезда препятствия, по которым может двигаться транспортное средство 20, справа и слева от препятствия 30 в направлении движения транспортного средства 20 направо/налево. Иными словами, транспортное средство 20 может избежать столкновения с препятствием 30, сделав правый поворот, или может избежать столкновения с препятствием 30, сделав левый поворот. В подобном случае, если блок 102 управления вспомогательной системой управления транспортным средством отдает команду ЭУР 10 и пытается совершить либо правый, либо левый поворот, водитель транспортного средства 20 может повернуть руль, чтобы совершить поворот в противоположном направлении. В этом случае водитель чувствует, что действия системы не совпадают с его намерениями, поскольку процесс вспомогательного управления транспортным средством, выполняемый блоком 102 управления вспомогательной системы управления транспортным средством, вступает в конфликт действиями водителя по управлению транспортным средством.
[0037] Таким образом, при выполнении процесса вспомогательного управления транспортным средством на этапе S105, блок 102 управления вспомогательной системой управления транспортным средством снижает скорость транспортного средства 20 с максимальным тормозящим усилием со стороны ЭТУ 11, без изменения угла поворота управляемых колес при помощи ЭУР 10 или без изменения направления движения транспортного средства 20 путем применения разного давления тормозной жидкости на правые и левые колеса транспортного средства 20, соответственно. Отметим также, что в ходе этого процесса блок 102 управления вспомогательной системой управления транспортным средством не выполняет поворот транспортного средства 20, а, напротив, водитель совершает маневр по своему собственному усмотрению. Таким образом, процесс вспомогательного управления транспортным средством выполняется только при торможении с применением тормозного усилия, а поворот транспортного средства 20 при помощи рулевого управления выполняется исключительно на усмотрение водителя, благодаря чему становится невозможным процесс выполнения, который не соответствует ожиданиям и намерениям водителя. Отметим также, что для обеспечения изменения направления движения водителем при помощи рулевого управления предпочтительно создавать максимальное тормозное усилие в пределах, которые обеспечивают создание поперечной силы, которая так или иначе необходима для выполнения поворота. Однако, если транспортное средство 20 может снизить скорость достаточно для того, чтобы остановиться перед препятствием 30, тормозное усилие для снижения скорости транспортного средства 20 может применяться с более высоким приоритетом, чем поперечная сила для выполнения поворота в результате поворота руля водителем. После завершения этапа S105 данный процесс повторяется с самого начала.
[0038] С другой стороны, на этапе S106 блок 102 управления вспомогательной системой управления транспортным средством также выполняет процесс вспомогательного управления транспортным средством для предотвращения столкновения транспортного средства 20 с препятствием 30. Этот процесс подробно описан со ссылкой на ФИГ. 4В. Как описано выше, в условиях, показанных на ФИГ. 4В, есть траектории объезда препятствия, по которым может двигаться транспортное средство 20 только в правильном направлении движения транспортного средства 20 по отношению к препятствию 30. Иными словами, транспортное средство 20 может избежать столкновения с препятствием 30, выполнив только правый поворот. В случае, если направление поворота транспортного средства 20 ограничено подобным образом, направление поворота транспортного средства 20, выбранное водителем, и направление поворота транспортного средства 20, выбранное блоком 102 управления вспомогательной системой управления транспортным средством совпадут друг с другом. Таким образом, в подобном случае блок 102 управления вспомогательной системой управления транспортным средством выполняет поворот транспортного средства 20 путем изменения угла поворота рулевого колеса при помощи ЭУР 10 или с применением разного давления тормозной жидкости к правым и левым колесам транспортного средства 20, соответственно, тем самым выполняя процесс вспомогательного управления транспортным средством таким образом, что транспортное средство 20 двигается, например, по одной из траекторий b1, b11 или b12, показанных на ФИГ. 4В. Кроме того, в дополнении к повороту, также осуществляется снижение скорости благодаря созданию тормозного усилия при помощи ЭТУ 11. После завершения этапа S106 процесс повторяется с самого начала.
[0039] В соответствии с выполнением процесса вспомогательного управления транспортным средством, показанным на ФИГ. 3, ход выполнения процесса, выполняемого блоком 102 управления вспомогательной системой управления транспортного средства, корректируется в зависимости о того, существуют или нет траектории объезда препятствия, по которым может двигаться транспортное средство 20 в случае, если препятствие 30 обнаружено, справа или слева от препятствия 30 в направлении движения транспортного средства 20 направо/налево. В результате, столкновения транспортного средства 20 с препятствием 30 можно избежать, и при этом процесс вспомогательного управления транспортным средством будет соответствовать ожиданиям и намерениям водителя транспортного средства 20. Отметим также, что в процессе, показанном на ФИГ. 3, максимальное изменение ΔGy поперечной составляющей ускорения, которое возможно для транспортного средства 20, используется для расчета траектории объезда препятствия на этапе S103. И напротив, заранее заданное ограничение может быть наложено на изменение поперечной составляющей ускорения для расчета траектории объезда препятствия, в соответствии с заранее определенной задачей. Например, чтобы дать водителю возможность скорректировать управление углом поворота рулевого колеса при выполнении блоком 102 управления вспомогательной системой управления транспортным средством изменения угла поворота рулевого колеса при помощи ЭУР 10, траектория объезда препятствия может быть рассчитана с изменением боковой составляющей ускорения, ограниченным в пределах примерно от 0,2 G до 0,3 G. В случае, когда траектория объезда препятствия на этапе S103 рассчитывается в соответствии с такими предельными параметрами, как описано выше, даже если блок 102 управления вспомогательной системой управления транспортным средством выполняет вспомогательное управление таким образом, чтобы для изменения направления движения транспортного средства 20, водитель может переключить на себя рулевое управление и выполнить поворот транспортного средства 20 так, как он сам или она сама посчитает нужным.
[0040] 〈Второй вариант осуществления изобретения〉
Далее второй вариант осуществления процесса вспомогательного управления транспортным посредством вспомогательной системы управления транспортным средством, согласно настоящему изобретению, будет описан со ссылкой на ФИГ. с 5 по 7. Поскольку выполнение процесса на этапах с S101 по S105 согласно блок-схеме ФИГ. 5 соответствует этапам с S101 по S105 процесса вспомогательного управления транспортным средством, представленным на ФИГ. 3, их подробное описание далее не приводится. Отметим также, что в данном варианте осуществления изобретения, при расчете траектории объезда препятствия на этапе S103 заранее заданное ограничение не принимается во внимание при определении максимального изменения ΔGy поперечной составляющей ускорения, которое может применяться для транспортного средства 20.
[0041] Здесь необходимо уточнить, что при выполнении процесса вспомогательного управления транспортным средством, показанного на ФИГ. 5, если блок 102 управления вспомогательной системой управления транспортным средством принимает отрицательное решение относительно наличия или отсутствия траекторий объезда препятствия справа и слева от препятствия 30 в направлении движения транспортного средства 20 направо/налево по отношению к обнаруженному препятствию 30, процедура переходит к этапу S201. На этапе S201, для траектории объезда препятствия, рассчитанной ранее на этапе S103, вычисляется угловая скорость рыскания γ, позволяющая избежать столкновения, в качестве угловой скорости рыскания, с которой должно двигаться транспортное средство 20 по траектории объезда препятствия. В частности, угловая скорость рыскания γ используется при расчете траектории объезда препятствия, как указано выше. Таким образом, данная угловая скорость рыскания применяется в качестве угловой скорости рыскания γ, позволяющей избежать столкновения, для расчета траектории объезда препятствия, которая не должна пересечься с препятствием 30. Например, в условиях, показанных на ФИГ. 4В, где траектории объезда препятствия доступны только справа от транспортного средства 20 по отношению к препятствию 30, угловые скорости рыскания γ1, γ11 и γ12, позволяющие избежать столкновения, задаются, соответственно, для траекторий объезда препятствия b1, b11 и b12. Эти три значения соотносятся друг с другом таким образом, что: γ1>γ12>γ11, тоже станет очевидным при сравнении радиусов поворота транспортного средства 20. После завершения этапа S201 процесс переходит к выполнению этапа S202.
[0042] На этапе S202 определяется наличие или отсутствие траектории объезда препятствия, при движении по которой модуль |γ| угловой скорости рыскания γ, позволяющей избежать столкновения, рассчитанной на этапе S201, будет равен или меньше заданному пороговому значению γ0. Пороговое значение γ0 используется для задания верхнего предела модуля поперечной составляющей ускорения, которое создается, когда транспортное средство 20 совершает поворот, чтобы дать возможность водителю переключить на себя рулевое управление, когда блок 102 управления вспомогательной системой управления транспортным средством выполняет управление ЭУР 10. Например, в качестве порогового значения может быть принято γ0, которое равно 0,2 G-0,3 G. Иными словами, решение на этапе S202 является процессом выбора одной или нескольких из рассчитанных траекторий объезда препятствия таким образом, чтобы поперечная составляющая ускорения, создаваемая в случае столкновения транспортного средства 20 с препятствием 30, не приняла слишком большое значение, способное ограничить возможность водителя применять рулевое управление, хотя столкновения можно избежать независимо от того, какая именно из траекторий объезда препятствия, рассчитанных на этапе S103, будет выбрана. Если на этапе S202 принято положительное решение, выполняется переход к этапу S203. Если на этапе S202 принято отрицательное решение, процедура переходит к этапу S204.
[0043] Здесь необходимо уточнить, что на этапе S203 блок 102 управления вспомогательной системой управления транспортным средством выполняет процесс вспомогательного управления транспортным средством для предотвращения столкновения транспортного средства 20 с препятствием 30. Этот процесс подробно описан со ссылкой на ФИГ. 4В. Как описано выше, в условиях, показанных на ФИГ. 4В, траектории объезда препятствия, по которым может двигаться транспортное средство 20, существуют только справа от транспортного средства 20 по отношению к препятствию 30. Затем, поскольку на этапе S202 принято положительное решение, доступна траектория объезда препятствия, для которой модуль угловой скорости рыскания γ, позволяющей избежать столкновения, будет равен или меньше заданному пороговому значению γ0 (в данном варианте осуществления изобретения мы исходим из предположения, что траектория объезда препятствия b11 удовлетворяет данному условию), в числе рассчитанных траекторий объезда препятствия b1, b11 и b12. В таком случае вспомогательное управление транспортным средством блоком 102 управления вспомогательной системой управления транспортным средством заключается в том, что блок 102 управления вспомогательной системой управления транспортным средством регулирует угол поворота рулевого колеса при помощи ЭУР 10 или создает разное давление тормозной жидкости на правых и левых колесах транспортного средства 20, соответственно, в результате чего транспортное средство 20 совершает поворот, двигаясь по траектории b11 объезда препятствия. Более того, для выполнения поворота транспортного средства 20 и для снижения скорости транспортного средства 20 блок 102 управления вспомогательной системой управления транспортным средством подает на ЭТУ 11 команду создать тормозное усилие. Как следствие, на этапе S203 транспортное средство 20 снижает скорость, выполняя поворот по траектории, которая позволяет избежать столкновения транспортного средства 20 с препятствием 30. После завершения процесса на этапе S203 последовательность действий повторяется с самого начала.
[0044] С другой стороны, если на этапе S202 принято отрицательное решение, а именно, если принято решение, согласно которому модуль угловой скорости рыскания γ, позволяющей избежать столкновения, превышает пороговое значение γ0, процесс вспомогательного управления транспортным средством выполняется согласно этапу S204. Ситуация, в которой на этапе S202 принято отрицательное решение, возникает в том случае, если столкновения можно избежать, двигаясь по траекториям объезда препятствия b1 и b12, для которых модуль угловой скорости рыскания γ, позволяющей избежать столкновения, превышает пороговое значение γ0, однако транспортное средство 20 столкнется с препятствием 30, двигаясь по траектории объезда препятствия b11, для которой модуль угловой скорости рыскания γ, позволяющей «избежать» столкновения, будет равен или меньше порогового значения γ0, как показано на ФИГ. 7. Таким образом, на этапе S204 предполагается, что блок 102 управления вспомогательной системой управления транспортным средством выполняет процесс вспомогательного управления транспортным средством с предельными параметрами поворота транспортного средства 20, при которых модуль угловой скорости рыскания γ, позволяющей избежать столкновения, представляет собой пороговое значение γ0, исходя из возможной скорости столкновения Vc транспортного средства 20 с препятствием 30. Этот процесс будет описан со ссылкой на блок-схему, представленную на ФИГ. 6 и ФИГ. 7.
[0045] В рамках процесса вспомогательного управления транспортным средством, выполняемого согласно этапу S204, в первую очередь на этапе S301, параметры выполнения поворота транспортного средства 20 устанавливаются в качестве предельных параметров. Говоря более конкретно, предполагается, что транспортное средство 20 выполняет поворот, двигаясь по траектории объезда препятствия, из числа рассчитанных траекторий объезда препятствия, для которых модуль угловой скорости рыскания γ, позволяющий избежать столкновения, будет равен пороговому значению γ0 или будет максимально приближен к пороговому значению γ0 с целью расчета описанной далее возможной скорости столкновения Vc. В примере, показанном на ФИГ. 7, предполагается, что транспортное средство 20 выполняет поворот, двигаясь по траектории объезда препятствия b11. Тогда, предположительно, на этапе S302 рассчитывается возможная скорость столкновения Vc, которая представляет собой возможную скорость столкновения при выполнении поворота по траектории объезда препятствия b11. В частности, близкое к максимальному тормозное усилие, которое может применяться к транспортному средству 20, рассчитывается на основе поперечной силы, которая необходима при движении транспортного средства 20 по траектории объезда препятствия b11, как и сила трения между транспортным средством 20 и дорожным покрытием, и скорость транспортного средства Vc в случае столкновения транспортного средства 20 с препятствием 30 рассчитывается с учетом снижения скорости, которая соответствует тормозному усилию в момент столкновения с препятствием 30 при движении по траектории объезда препятствия b11. После завершения этапа S302 процесс переходит к выполнению этапа S303.
[0046] С другой стороны, после выполнения этапа S303 рассчитывается возможная скорость столкновения Vfb, которая представляет собой скорость транспортного средства в случае, если транспортное средство 20 не принуждают двигаться по траектории объезда препятствия, рассчитанной на этапе S103, и снижают скорость тормозным усилием, которое близко к максимальному тормозному усилию, которое может быть применено к транспортному средству 20, двигающемуся в направлении движения транспортного средства 20, обозначенном как траектория движения (без выполнения поворота). В частности, близкое к максимальному тормозное усилие, которое может быть применено к транспортному средству 20, рассчитывается на основе поперечной силы (поперечная сила равна нулю, когда транспортное средство двигается по прямой линии), необходимой тогда, когда транспортное средство 20 двигается по траектории а, и силы трения между транспортным средством 20 и дорожным покрытием, и скорость транспортного средства Vfb в случае, если транспортное средство 20 сталкивается с препятствием 30, рассчитывается с учетом снижения скорости, которое соответствует тормозящему усилию в момент столкновения с препятствием 30 при движении по траектории а. После завершения этапа S303 процесс переходит к выполнению этапа S304.
[0047] На этапе S304 возможная скорость столкновения Vc, рассчитанная на этапе S302, и возможная скорость столкновения Vfb, рассчитанная на этапе S303, сравниваются между собой, и принимается решение, будет или нет возможная скорость столкновения Vc ниже, чем возможная скорость столкновения Vfb. Если принято положительное решение, выполняется переход к этапу S305. Если принято отрицательное решение, процесс переходит к выполнению этапа S306. Переход к этапу S305 выполняется в том случае, когда возможная скорость столкновения Vc ниже возможной скорости столкновения Vfb, что свидетельствует о том, что скорость транспортного средства 20 в случае столкновения будет ниже, если транспортное средство будет двигаться по траектории объезда препятствия b11, чем когда транспортное средство будет двигаться по траектории а, даже в случае когда транспортное средство 20 все-таки столкнется с препятствием 30. Таким образом, на этапе S305, чтобы направить транспортное средство по траектории b11 объезда препятствия, на которой скорость транспортного средства в случае столкновения с препятствием будет низкой, блок 102 управления вспомогательной системой управления транспортным средством регулирует угол поворота рулевого колеса при помощи ЭУР 10 или создает различное давление тормозной жидкости на правые и левые колеса транспортного средства 20. Более того, для снижения скорости транспортного средства 20 и поворота транспортного средства 20, а именно для применения тормозного усилия, которое было задано при расчете возможной скорости столкновения Vc на этапе S302, блок 102 управления вспомогательной системой управления транспортным средством направляет команду на ЭТУ 11. После завершения этапа S305, выполнение этапа S204, показанного на ФИГ. 5, завершается, и процесс, показанный на ФИГ. 5 повторяется снова.
[0048] С другой стороны, переход к этапу S306 выполняется в том случае, когда возможная скорость столкновения Vfb равна или ниже возможной скорости столкновения Vc, что означает, что скорость транспортного средства 20 в случае столкновения будет ниже, если транспортное средство будет двигаться по траектории а, чем когда скорость транспортного средства, двигающегося по траектории b11, в том случае, когда транспортное средство 20 все-таки столкнется с препятствием 30. Таким образом, на этапе S305, чтобы направить транспортное средство по траектории, на которой скорость транспортного средства в случае столкновения будет низкой, блок 102 управления вспомогательной системой управления транспортным средством направляет команду на ЭТУ 11 и выполняет снижение скорости транспортного средства 20, а именно, прилагает тормозное усилие, которое было задано при расчете возможной скорости столкновения Vfb на этапе S303 при поддержании угла рулевого колеса со стороны ЭУР 10. После завершения этапа S306 этап S204, показанный на ФИГ. 5, завершается, и процесс, представленный на ФИГ. 5, повторяется снова.
[0049] Согласно процессу вспомогательного управления транспортным средством, показанному на ФИГ. 5 и 6, конкретные шаги, выполняемые блоком 102 управления вспомогательной системой управления транспортным средством, определяются в зависимости от того, доступны или нет траектории объезда препятствия, по которым может двигаться транспортное средство 20 в случае обнаружения препятствия 30, справа и слева от препятствия 30 в направлении движения транспортного средства 20 направо/налево. Как следствие, столкновения транспортного средства 20 с препятствием 30 можно избежать благодаря процессу вспомогательного управления транспортным средством, который согласуется с намерениями водителя транспортного средства 20. Кроме того, даже в том случае, когда траектория объезда препятствия, по которой может двигаться транспортное средство 20, существует только справа или слева по отношению к препятствию 30 в направлении движения транспортного средства 20 направо/налево, если модуль угловой скорости рыскания γ при выполнении поворота равен или меньше пороговому значению γ0, столкновения с препятствием 30 можно избежать с учетом снижения скорости в результате выполнения поворота и торможения транспортного средства 20 с ограниченной угловой скоростью рыскания при выполнении поворота. В результате, можно избежать столкновения с препятствием 30 поворотом руля водителем влево. Таким образом, процесс вспомогательного управления транспортным средством будет полностью отвечать ожиданиям и намерениям водителя. Кроме того, в том случае, если столкновения транспортного средства 20 с препятствием 30 невозможно избежать при условии ограниченной угловой скорости рыскания при выполнении поворота, выполнением поворота и торможением транспортного средства 20 можно управлять таким образом, чтобы снизить скорость транспортного средства в случае столкновения. В результате, скорость транспортного средства по отношению к препятствию 30 в случае столкновения можно максимально снизить, поворотом руля влево. Таким образом, выполняется процесс вспомогательного управления транспортным средством, который позволяет максимально смягчить последствия столкновения, и который не противоречит ожиданиям и намерениям водителя.
[0050] Отметим также, что при выполнении процесса вспомогательного управления транспортным средством, показанного на ФИГ. 5 и 6, после расчета траектории объезда препятствия на этапе S103, на этапах S201 и S202 учитывается заранее заданное ограничение угловой скорости рыскания, позволяющей избежать столкновения, в соответствии с траекторией объезда препятствия. Но вместо этого, в момент произведения расчетов на этапе S103, может быть рассчитана траектория объезда препятствия, с учетом заранее заданного ограничения. В подобном случае содержание решения, принимаемого на этапе S202, заменяется следующей формулировкой: «доступна или нет траектория объезда препятствия с правой или с левой стороны». Если на этапе S202 принято положительное решение, выполняется этап S203. Если на этапе S202 принято отрицательное решение, выполняется этап S204.
[0051] 〈Третий вариант осуществления〉
Далее третий вариант осуществления процесса вспомогательного управления транспортным средством, выполняемого вспомогательной системой управления транспортным средством, согласно настоящему изобретению, будет описан со ссылкой на ФИГ. 8. Отметим также, что, поскольку процесс на этапах с S101 по S105 и с S201 по S204, показанные на блок-схеме ФИГ. 8, соответствуют процессу на этапах с S101 по S105 и с S201 по S204, показанные на блок-схеме ФИГ. 5, их подробное описание здесь не приводится. Здесь необходимо уточнить, что при выполнении процесса вспомогательного управления транспортным средством, показанного на ФИГ. 8, если блок 100 определения траектории движения по дороге на этапе S102 принимает решение о наличии препятствия 30 впереди по направлению движения транспортного средства 20, выполняется переход к этапу S401. На этапе S401, если транспортное средство 20 начинает снижать скорость в результате торможения, продолжая двигаться вперед, принимается решение относительно того, способно ли транспортное средство 20 остановиться в результате снижения скорости до столкновения с препятствием 30. Конкретное описание этого процесса приведено со ссылкой на ФИГ. 4А. Исходя из предположения, что транспортное средство 20 продолжит движение по траектории а, решение на этапе S401 принимается с учетом дистанции до препятствия 30, скорости транспортного средства 20 и тормозного усилия, которое может быть применено. Если в результате принято положительное решение, процедура переходит к выполнению этапа S402. Если принято отрицательное решение, выполняется переход к этапу S103.
[0052] На этапе S402, как и на этапе S105, блок 102 управления вспомогательной системой управления транспортным средством выполняет снижение скорости с максимальным тормозным усилием при помощи ЭТУ 11, без выполнения поворота транспортного средства 20 путем изменения угла поворота рулевого колеса при помощи ЭУР 10, либо с применением различного давления тормозной жидкости на правые и левые колеса транспортного средства 20. После завершения этапа S402 процесс повторяется снова. Кроме того, если на этапе S401 принято отрицательное решение, выполняется переход к этапу S103. Но поскольку процесс, начиная с этапа S103, уже был описан выше, это описание повторяться не будет.
[0053] В соответствии с процессом вспомогательного управления транспортным средством, показанным на ФИГ. 8, если выявлено наличие препятствия 30, и транспортное средство может быть остановлено, благодаря тормозному усилию незамедлительно выполняется снижение скорости с максимальным тормозным усилием без расчета траектории объезда препятствия. Как следствие, процесс вспомогательного управления транспортным средством для предотвращения столкновения с препятствием 30 может выполняться максимально быстро, что гарантирует предотвращение столкновения с препятствием.
[0054] 1 БЛОК ЭБУ
2 БЛОК ИДЕНТИФИКАЦИИ ОКРУЖАЮЩЕГО ПРОСТРАНСТВА
3 ДАТЧИК УГЛОВОЙ СКОРОСТИ РЫСКАНИЯ
4 ДАТЧИКИ СКОРОСТИ ВРАЩЕНИЯ КОЛЕС
5 ДАТЧИК УСКОРЕНИЯ
6 ДАТЧИК ТОРМОЖЕНИЯ
7 ДАТЧИК ПЕДАЛИ АКСЕЛЕРАТОРА
8 ДАТЧИК УГЛА ПОВОРОТА РУЛЕВОГО КОЛЕСА
9 ДАТЧИК КРУТЯЩЕГО МОМЕНТА РУЛЕВОГО КОЛЕСА
10 ЭЛЕКТРИЧЕСКИЙ УСИЛИТЕЛЬ РУЛЯ (ЭУР)
11 ЭЛЕКТРОННАЯ ТОРМОЗНАЯ СИСТЕМА (ЭТУ)
20 ТРАНСПОРТНОЕ СРЕДСТВО
30 ПРЕПЯТСТВИЕ (ТВЕРДОЕ ТЕЛО)
100 БЛОК ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ПО ДОРОГЕ
101 БЛОК РАСЧЕТА ЦЕЛЕВОЙ ТРАЕКТОРИИ ОБЪЕЗДА ПРЕПЯТСТВИЯ
102 БЛОК УПРАВЛЕНИЯ ВСПОМОГАТЕЛЬНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВСПОМОГАТЕЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2011 |
|
RU2570191C2 |
| УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ | 2016 |
|
RU2654839C2 |
| СПОСОБ ПРЕВЕНТИВНОГО СМЕЩЕНИЯ ЦЕНТРА ТЯЖЕСТИ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА В СТОРОНУ ПОВОРОТА | 2020 |
|
RU2749154C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ЕЕ ЭКСПЛУАТАЦИИ | 2014 |
|
RU2665208C2 |
| СИСТЕМА ПОСЛЕАВАРИЙНОГО ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2571843C1 |
| УСТРОЙСТВО ПОМОЩИ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ | 2020 |
|
RU2737180C1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2020 |
|
RU2740820C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2721343C1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2737069C1 |







Изобретение относится к вспомогательным системам управления транспортным средством, в том числе к системам для предотвращения столкновений. В системе, которая обеспечивает вспомогательное управление транспортным средством в случае обнаружения препятствия по ходу движения транспортного средства, при этом по крайней мере одна траектория объезда препятствия, позволяющая избежать столкновения транспортного средства с препятствием, найдена с учетом режима движения транспортного средства. Затем, если рассчитанная траектория объезда препятствия может проходить справа и слева от транспортного средства в объезд препятствия, выполняется управление торможения транспортного средства без выполнения управления поворотом транспортного средства. Обеспечивается вспомогательное управление транспортным средством, которое предотвращает столкновение транспортного средства с препятствием. 5 з.п. ф-лы, 2 ил.
1. Вспомогательная система управления транспортным средством, включающая:
блок определения, который обнаруживает наличие препятствия, находящегося по ходу движения транспортного средства;
блок сбора и обработки данных, который находит по крайней мере одну траекторию объезда препятствия, позволяющую избежать столкновения транспортного средства с препятствием, с учетом режима движения транспортного средства, если блок определения обнаруживает наличие препятствия; и
блок управления вспомогательной системой управления транспортным средством, который выполняет вспомогательное управление транспортным средством для предотвращения столкновения транспортного средства с препятствием на основе траектории объезда препятствия, найденной блоком сбора и обработки данных, отличающийся тем, что
блок управления вспомогательной системой управления транспортным средством принимает решение относительно торможения транспортного средства без выполнения поворота транспортного средства, если траектория объезда препятствия, найденная блоком сбора и обработки данных, проходит справа и слева от препятствия в направлении движения транспортного средства направо/налево.
2. Вспомогательная система управления транспортным средством по п. 1, в которой блок управления вспомогательной системой управления транспортным средством разрешает выполнить управление в отношении поворота транспортного средства, при этом угол поворота транспортного средства с использованием блока управления вспомогательной системой управления транспортным средством ограничен так, чтобы не превышать заданного угла поворота, который определяется на основании угла поворота, который может быть выполнен в результате поворота руля водителем, если траектория объезда препятствия, найденная блоком сбора и обработки данных, доступна справа или слева от препятствия в направлении движения транспортного средства направо/налево.
3. Вспомогательная система управления транспортным средством по п. 2, которая дополнительно включает блок принятия решения, принимающий решение относительно того, можно ли избежать столкновения транспортного средства с препятствием при движении в режиме с ограничением, когда угол поворота транспортного средства, заданный блоком управления вспомогательной системой управления транспортным средством, ограничен таким образом, чтобы не превышать заданный угол поворота, при этом
блок управления вспомогательной системой управления транспортным средством принимает решение относительно того, можно ли разрешить управление поворотом транспортного средства с использованием блока управления вспомогательной системой управления транспортным средством, исходя из возможной скорости столкновения транспортного средства, в случае, если транспортное средство столкнется с препятствием, когда блок управления вспомогательной системой управления транспортным средством выполняет поворот и торможение, в рамках режима с ограничением, если блок принятия решения принимает решение, что столкновения транспортного средства с препятствием невозможно избежать.
4. Вспомогательная система управления транспортным средством по п. 3, в которой блок управления вспомогательной системой управления транспортным средством рассчитывает меньшую возможную скорость столкновения в случае, если транспортное средство столкнется с препятствием, когда применяется вспомогательное управление, и максимальное тормозное усилие создается для торможения транспортного средства, но без управления поворотом со стороны блока управления вспомогательной системой управления транспортным средством, и выполняет торможение транспортного средства наряду с поворотом транспортного средства, если возможная скорость столкновения будет ниже, чем меньшая возможная скорость столкновения.
5. Вспомогательная система управления транспортным средством по п. 3, в которой блок управления вспомогательной системой управления транспортным средством рассчитывает меньшую возможную скорость столкновения в случае, если транспортное средство сталкивается с препятствием, когда оно управляется в автоматическим режиме, и максимальное тормозное усилие создается для торможения транспортного средства, но без выполнения управления поворотом блоком управления вспомогательной системой управления транспортным средством, и выполняет только торможение транспортного средства без выполнения управления поворотом транспортного средства, если возможная скорость столкновения будет не ниже, чем меньшая возможная скорость столкновения.
6. Вспомогательная система управления транспортным средством по п. 2, которая дополнительно включает блок принятия решения, принимающий решение относительно того, можно ли избежать столкновения транспортного средства с препятствием в режиме с ограничением, когда угол поворота транспортного средства с использованием блока управления вспомогательной системой управления транспортным средством, ограничен таким образом, чтобы не превышать заданного угла поворота, при этом
блок управления вспомогательной системой управления транспортным средством выполняет управление торможением транспортного средства, а также управление поворотом транспортного средства, если блок принятия решения принимает решение о том, что столкновения транспортного средства с препятствием можно избежать.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ АКТИВНОЙ БЕЗОПАСНОСТИ ТРАНСПОРТНЫХ СРЕДСТВ ПРИ ДВИЖЕНИИ В КОЛОННЕ | 2007 |
|
RU2388057C2 |
| Способ получения изопропанола | 1973 |
|
SU512695A3 |

