Последующее полностью относится к обработке изображений и в особенности находит применение в компьютерной томографии (КТ). Однако это также может относиться к другим медицинским и немедицинским видам применения, связанным с обработкой изображений.
Для применений, связанных с обработкой изображений, в которых интересующая ткань (например, опухоль, орган и т.д.) в субъекте двигается относительно субъекта с течением времени благодаря циклическому движению одной из тканей субъекта (например, легких), может быть использована четырехмерная (4D) последовательность изображений для оценивания движения интересующей ткани во время цикла движения. Одним из особых применений, когда это может быть полезно, является радиотерапевтическое лечение опухоли в легких. При таком применении относительное расположение опухоли может меняться в ходе дыхательного цикла. С целью определения дозы лечения в расчет должно приниматься относительное положение опухоли, и оно может быть определено посредством использования 4D последовательности изображений.
При использовании одной из технологий 4D изображений одновременно получаются проекции изображений и импульс дыхания в течение нескольких циклов движения. Импульс дыхания расписан по времени для сбора данных и используется для группирования проекций изображений, основанных на полной фазе дыхания. Затем воспроизводится трехмерный (3D) набор изображений в различных фазах дыхательного цикла. Для расчета дозы радиотерапии интересующая опухоль разделяется на сегменты в различных стадиях дыхательного цикла. В одном случае клинический врач разделяет опухоль на сегменты для каждого изображения. К сожалению, это может потребовать времени и быть трудоемкой задачей, требующей обработки десятков или сотен изображений.
В другом случае используется запись соседних изображений, основанная на парном изображении, для распространения контуров, повторно отображающих опухоль от одного изображения к следующему. Из записи парного изображения может быть получена схема движения в ходе дыхательного цикла, и она может быть использована для оценивания движения ткани. К сожалению, запись парного изображения чувствительна к локальным факторам, искажающим изображение, что может привести к ошибочным изменениям формы и размеров изображений интересующей ткани. В качестве альтернативы контур может быть распространен посредством использования анатомической модели, в которой модели активной формы интересующей ткани распространяются от одной дыхательной фазы к следующей. Подобным образом, анатомическая модель, основанная на распространении, может быть чувствительна к ошибке, например, вызванной различиями между анатомической моделью и фактической анатомией.
Аспекты настоящей заявки обращены к вопросам, упомянутым выше, и к другим вопросам.
Согласно одному из аспектов способ содержит формирование набора записанных групповых изображений из последовательности изображений временного ряда на основе интересующей области субъекта или объекта, идентифицируемого, по меньшей мере, на одном из изображений, последовательности изображений и модели движения, указывающей оценивание движения субъекта или объекта, во время которого будет получена последовательность изображений.
В другом варианте осуществления система включает в себя устройство, идентифицирующее интересующую область, которое идентифицирует интересующую область, по меньшей мере, на одном изображении в серии изображений двигающегося объекта, банк моделей, содержащий одну или более моделей, указывающих циклическое движение двигающегося объекта, и компонент записи, который записывает в групповом порядке изображения на основе модели движения из банка моделей.
В другом варианте осуществления читаемый компьютером носитель данных, содержащий инструкции, которые, при выполнении компьютером, предписывают компьютеру выполнять следующие действия: получение последовательности изображений временного ряда двигающегося объекта или субъекта, получение модели движения, указывающей движение объекта или субъекта, задание интересующей области на одном из изображений последовательности изображений; и распространение интересующей области на одно или более изображений в последовательности изображений на основе групповой записи изображений с использованием модели движения.
В другом варианте осуществления читаемый компьютером носитель, содержащий инструкции, которые, при выполнении компьютером, предписывают компьютеру выполнять следующие действия: получение последовательности изображений временного ряда двигающегося объекта или субъекта, получение модели движения, указывающей движение объекта или субъекта, задание интересующей области на одном изображении последовательности изображений; и групповую запись изображений на основе последовательности изображений, модели движения и интересующей области.
Настоящее изобретение может быть оформлено с использованием различных компонентов и расположением этих компонентов и с использованием различных шагов и расположением этих шагов. Чертежи имеют цель только изобразить предпочтительные варианты осуществления и не должны трактоваться как ограничивающие настоящее изобретение.
Фиг.1 иллюстрирует пример системы обработки изображений.
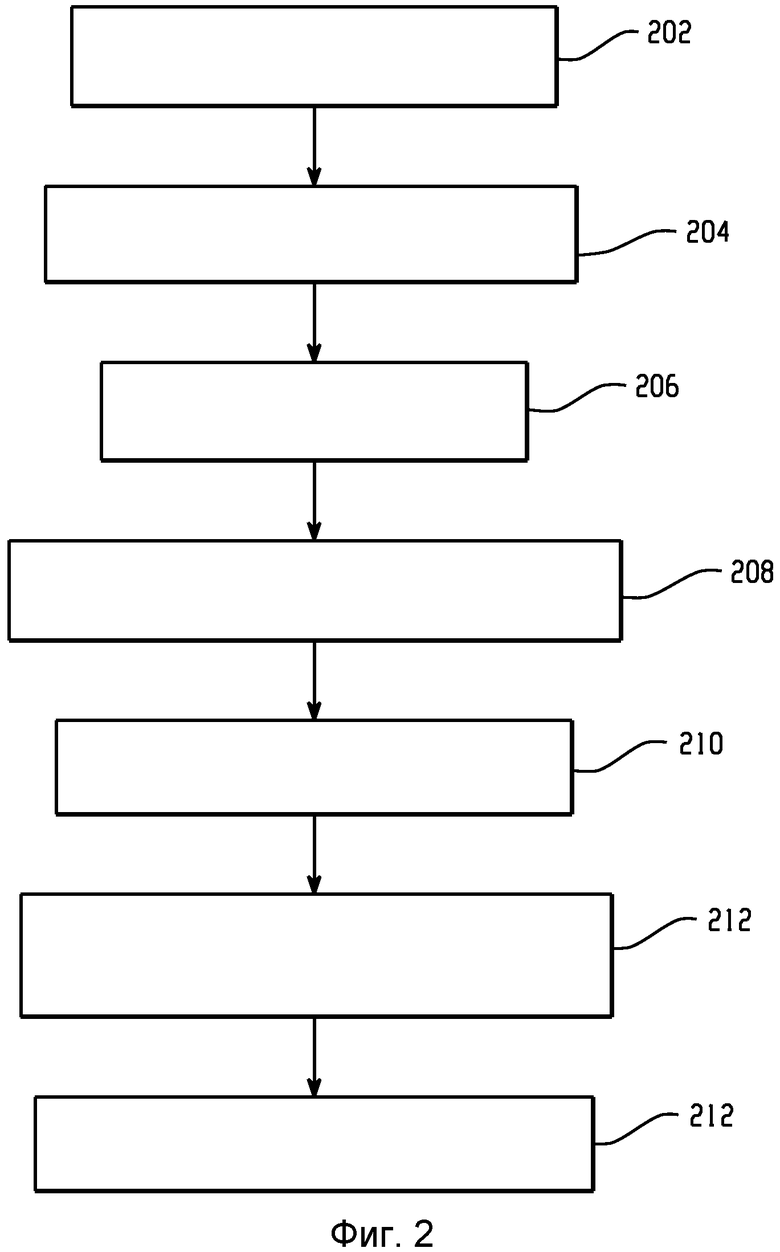
Фиг.2 иллюстрирует пример способа обработки изображений.
Последующее полностью относится к групповой записи последовательности или временного ряда изображений интересующей области (ROI) субъекта или объекта, основанной на модели движения, которая оценивает или моделирует движение субъекта или объекта во время получения данных. Такая запись может уменьшать пропускание искажений изображения, которые могут возникать в конфигурации, основанной на парной анатомической модели или произведенной другим способом записи изображения. Как таковые, записанные изображения хорошо подходят для автоматического распространения ROI, такие как контуры, кодирование и тому подобное, идентифицируемые, по меньшей мере, на одном изображении или на одном или более других изображениях в последовательности изображений. Ниже описана групповая запись в контексте изображений компьютерной томографии (КТ). Однако следует учитывать то, что такая запись может применяться в связи с другими способами обработки изображений, таких как MR, US и т.д.
Фиг.1 изображает систему обработки изображений или КТ сканер 100. Система 100 обработки изображений включает в себя стационарную рамку 102 и поворотную рамку 104, которая поддерживается в режиме поворота стационарной рамкой 102 и поворачивается около области 106 осмотра и около продольной оси или оси “z”. Источник 108 излучения, такой как рентгеновская трубка, поддерживается поворотной рамкой 104 и испускает излучение, которое проходит через область 106 осмотра. Матрица 110 детекторов, чувствительная к излучению, образует дугу, имеющую определенный угол, расположенную на противоположной стороне область 106 осмотра от источника 108 излучения, и определяющую излучение, проходящее через область 106 осмотра. Матрица 110 детекторов формирует сигнал, указывающий на обнаруженное излучение. Преобразующее устройство 112 преобразует сигнал, исходящий от матрицы 110 детекторов, и генерирует данные пространственного изображения, указывающие на него. Вычислительная система общего назначения служит в качестве пульта 114 управления. Резидентная часть программного обеспечения на пульте 114 управления позволяет оператору контролировать работу системы 100. Устройство 116, поддерживающее пациента, такое как кушетка, является опорой для объекта или для субъекта, такого, как пациент в области 106 осмотра.
В изображенном варианте осуществления система обработки изображений 100 используется для формирования временной последовательности изображений ткани или интересующей области субъекта или объекта, которая двигается во время цикла движения. Например, в одном случае система 100 используется для формирования последовательности регулируемых 4D-КT изображений опухоли, органа, полного объема облучаемых тканей и т.д. во время одного или более дыхательного и/или сердечного циклов. Такая последовательность изображений может включать в себя десятки, сотни и т.д. изображений в ходе многих циклов.
Устройство 118, идентифицирующее интересующую область (ROI), идентифицирует одну или более ROI в одной или более последовательностей изображений. Какое-либо определенное изображение может быть отобрано пользователем или автоматически на основе предварительных условий протокола, или иным способом. Отобранное изображение может находиться на одном из концов последовательности или быть близко к одному из них в середине или рядом с серединой последовательности, включая определенное изображение интересующей ткани и т.д. ROI может быть идентифицирована при помощи различных инструментальных средств, таких как предварительно заданные контуры (например, окружности, прямоугольники и т.д.), размеры которых могут быть изменены, которые могут быть повернуты и/или с которыми могут быть произведены другие действия, при помощи инструментов свободного нанесения контуров от руки, автоматического нанесения контуров на основе воксел - величин, угловых отклонений и т.д. и/или других инструментов.
Компонент 120 записи записывает изображения в последовательность и изображений. Как кратко было отмечено выше, это включает в себя групповую запись изображений, основанную на подходящей модели движения, идентифицированной (идентифицированных) ROI, и изображениях. Как более подробно описано ниже, в одном случае компонент 120 записи одновременно определяет один или более свободных параметров модели движения, основанной на всех или на части изображений, и локальных групповых записях изображений, основанных на ROI и модели движения. В случаях, когда ROI идентифицирована более, чем на одном изображении, преимущество для записи могут иметь другие ROI. Такие преимущества могут быть основаны на пространственных перспективах ROI (например, перспективах, стыкующихся друг с другом) в соответствующие моменты времени.
Банк 122 моделей включает в себя одну или более моделей движения, которые моделируют дыхательные движения, сердечные движения и/или другие движения. Как более подробно описано ниже, такие движения могут быть смоделированы как множество циклических траекторий с одним или более свободными параметрами, которые распространяются на всю последовательность изображений от опорного местоположения. Такая модель может быть сформирована как ряд Фурье или другая циклическая модель. Как было кратко отмечено выше, один или более свободных параметров модели движения определяются на основании всех или предварительно намеченной части изображений во время записи.
Устройство 124, идентифицирующее контрольную точку (или опорное местоположение), идентифицирует конечное множество контрольных точек (или опорных местоположений) около ROI. Такие точки могут быть расположены снаружи ROI, внутри ROI и/или по периметру ROI. Используя соответствующее приложение программного обеспечения, такие точки могут быть идентифицированы «кликом» на определенном месте на изображении мышкой или другим указывающим устройством или каким-либо другим способом. Компонент 120 записи использует модель с одним или более опорными местоположениями. Например, опорное местоположение может быть использовано как начальное условие для определения свободных параметров модели и записи изображений.
Устройство 126, идентифицирующее выборочные точки, идентифицирует конечный ряд точек около контрольной точки. Выборочные точки могут служить для того, чтобы свести к минимуму или уменьшить изменения в информации передаваемых изображений, например, среднее изменение значений серого вблизи траекторий. Выборочная точка может быть идентифицирована вручную или автоматически и обычно находится в области или рядом с соответствующим опорным местоположением, таким как внутри заранее определенной перспективы соответствующего опорного местоположения. Изменение между изображениями может быть сведено к минимуму с использованием известной технологии, такой как сумма квадратов и т.д.
Компонент 128 распространения контуров распространяет ROI на одно или более записанных изображений в последовательности изображений. Представляется ценным то, что ROI может быть расположена на одном из концов последовательности изображений и может распространяться через последовательность изображений, она может быть расположена ближе к середине последовательности изображений и может распространяться в обоих направлениях через последовательность изображений или в качестве альтернативы она может быть расположена и распространена через всю последовательность изображений.
Фиг.2 изображает способ выполнения групповой записи, основанной на модели движения. На этапе 202 получается временной ряд изображений интересующей ткани в течение одного или нескольких циклов движения. Как указано выше, временный ряд может формироваться с данными, получаемыми от CT, MRI, US или других сканеров изображений. Примером такого ряда может служить ряд изображений опухоли или другой интересующей ткани в легких в ходе одного или более дыхательных циклов. На этапе 204 ROI задается, по меньшей мере, на одном из изображений. Это может включать в себя идентифицирование ROI, которая представляет собой опухоль или другую интересующую ткань.
На этапе 206 получается подходящая модель движения. Как здесь описано, такая модель движения может быть циклической и задавать траектории движения в пациенте. На этапе 208 задается набор опорных местоположений или контрольных точек около ROI. Каждая контрольная точка предполагает точку, через которую проходит траектория, идущая через последовательность изображений. На этапе 210 задается набор выборочных точек в области контрольных точек, и он используется для того, чтобы уменьшить или свести к минимуму изменения на протяжении траектории. На этапе 212 определены один или более свободных параметров модели движения, основанной на ROI, набор опорных местоположений, набор выборочных точек и/или изображений, и изображения являются групповыми, записанными на основе модели движения. На этапе 214 ROI распространяется на одно или более изображений в записанной последовательности изображений.
Последующее рассматривает не ограничивающий пример. Для цели объяснения обсуждаемая модель движения является периодической пространственно-временной моделью. Однако здесь также рассматриваются и другие модели.
В изображенной модели траектория, идущая через последовательность изображений является аппроксимированной в конечномерном пространстве с использованием ряда Фурье порядка  , как функция Уравнений 1 и 2:
, как функция Уравнений 1 и 2:
Уравнение 1:
Уравнение 2:
где
c(x) представляет собой центр траектории, x представляет собой отправную точку траектории, и θi(x) представляет собой свободные параметры модели.
Конечное множество центров С ⊂ ℜd выбрано и использовано для вычисления траектории с центром c для точки x, предусматривающее запись, которая независимо сформулирована от выбранного начального времени, как функция Уравнения 3:
Уравнение 3:
где
Числовые приближенные значения траекторий, ассоциированные с центрами С, могут быть заданы посредством  параметров θi,c, которые являются свободными пространственными для записи групповых изображений. Для данного времени t и набора параметров θ ∈ ℜM центр c∈C может быть находиться в расположении c(t)∈C{t), которые являются центрами, обозначенными Уравнением 3 во времени t.
параметров θi,c, которые являются свободными пространственными для записи групповых изображений. Для данного времени t и набора параметров θ ∈ ℜM центр c∈C может быть находиться в расположении c(t)∈C{t), которые являются центрами, обозначенными Уравнением 3 во времени t.
Для других точек в ℜd/С, точки движения могут быть описаны посредством интерполяции, такой как тонко-пластиночная сплайновая интерполяция между центрами C и их изображениями C(t), или другим способом. Посредством неограниченного примера для ряда параметров Х ⊂ ℜd и ряда соответствующих изображений y(x) ∈ Y ⊂ ℜd тонко-пластиночная сплайновая (ТПС) интерполяция может быть определена, как функция Уравнения 4:
Уравнение 4:
которое задается набором точек пересечений X и изображений Y. При использовании данной системы обозначений траектории с другими точками s∈ℜd могут быть интерполированы как функция Уравнения 5:
Уравнение 5:
Один подход к стабилизации тонко-пластиночной сплайновой интерполяции должен предполагать, что угловые точки изображений являются неподвижными.
Выбор центров С может меняться. На изображенном варианте осуществления центры С выбраны на основании того, что интересующие области перемещаются в ходе цикла движения. В одном случае центры С могут быть однородно сформированы в заранее определенных пределах, близких к ROI. Эти центры могут быть созданы посредством формирования большого количества точек (например, одной тысячи) и кластеризации точек методом алгоритма k-средних для формирования от одного до пятидесяти центров.
Если изображения относятся к одной модальности и получены в одной серии, предполагается, что результаты наблюдений могут быть нормально распределены в дискретных позициях в пространстве траекторий. Данный ряд дискретных позиций S ⊂ ℜd, уровень яркости черно-белого изображения I(s) в позиции s ∈ S являются случайно изменяемыми, как следует далее N(µ(s);σ 2 ) с неизвестным средним показателем µ(s) и неизвестным показателем σ2 . В других позициях ℜd /S уровень яркости черно-белого изображения может быть рассмотрен как однородно распределяемый U(Vmin; V max ). Такая модель рассматривает запись локального набора точек.
Набор дискретных и неравномерно распределяемых выборочных точек S выбирается в локальной близости к центрам траекторий, указывают информацию о траектории. Это позволяет моделировать часть изображения, например только существенную часть изображения, такую как только точки внутри определенной ткани. В изображенном варианте осуществления выборочные точки выбраны случайно из однородного распределения около центров траектории и внутри периметра определенной ткани. В другом варианте осуществления выборочные точки выбираются другим способом, например, основываясь на изученной системе и/или оптимизации. Следует обратить внимание, что выборочные точки двигаются по траекториям в пространстве, которое может не иметь форму по Уравнению 1.
Наблюдение двух уровней яркости черно-белого изображения в двух раздельных позициях может рассматриваться как независимое. Распределение преобразованного, случайно измененного I(T) взаимно-однозначным преобразованием Т (т.е. параметризацией) является однородным, кроме позиций x ∈ ℜd, где T 1 (x) ∈ S. В этих позициях I(T) следует за нормальным распределением. Предполагая, что наблюдаемые изображения {I t} в точках в данное время t ∈ T:={t 1; …, t NT} ⊂ [0; 1] удовлетворяют критерию выбора и каждое изображение является независимым примером из распределения, данного выше, возможность наблюдения за данным уровнем яркости черно-белого изображения или правдоподобие этого являются функцией Уравнения 6:
Уравнение 6:

где константа суммирует вероятность во всех позициях, где распределение является равномерным и независимым от T t . Отрицательное логарифмическое правдоподобие образует Уравнение 7:
Уравнение 7:

Сведение к минимуму Уравнения 7 с учетом средней траектории уровня яркости черно-белого изображения µ(s) образует Уравнение 8:
Уравнение 8:

Замещение Уравнения 8 на µ(s) в Уравнении 7 оптимизирует Уравнение 7, что касается параметров θ∈ℜМ преобразований {T t }. Преобразование может быть достигнуто посредством использования метода Левенберга-Марквардта или другой оптимизирующей программы. Для этого отрицательное логарифмическое правдоподобие может быть извлечено в зависимости от градиента изображения в выборочных точках S. Данный градиент может быть локально оценен в этих позициях в числовом выражении и/или другим посредством. Выше изложенное предусматривает детальное моделирование траекторий и формулирование мер локального сходства (правдоподобия изображений). Перед управлением данным алгоритмом могут быть отобрано одно или несколько изображений.
В другом варианте осуществления применяется зависимая от времени дыхательная модель. Она учитывает то, что обычно дыхание не является синусоидным движением. Еще в одном варианте осуществления применяются скользящие поверхности, что облегчает и смягчает определенные записи, как, например, в легком, где область поражения на стенках легкого является прерывистой, тогда как ребра и позвоночник показывают малое движение или вообще не показывают его, в то время как ткань внутри легкого показывает большое движение.
Подход, описанный здесь, так же как и другие подходы и/или их варианты, может быть использован в контексте получения зависящих от времени данных, таких как дыхательное движение в 4D-КT изображении для лучевой терапии, для планирования применения лучевой терапии на мощных персональных компьютерах с обработкой изображений 4D-MR imaging, 4D-MR/CT imaging и т.д.
Вышеуказанное может быть выполнено в качестве консольного приложения сканера и/или мощного персонального компьютера с возможностью обработки и планирования изображений. Например, вышеуказанное может быть выполнено посредством применения инструкций, читаемых на компьютере, которые, при условии их выполнения процессором компьютера (компьютеров), консолью или рабочей станцией, заставляют процессор (процессоры) выполнять описанные действия. В этом случае инструкции хранятся в компьютере или на носителе информации, читаемом компьютером, относящемся к данному компьютеру или доступном для соответствующего компьютера. Какие-либо действия не должны совершаться одновременно с получением информационных данных.
Настоящее изобретение описано здесь со ссылкой на различные варианты осуществления. Во время чтения данного описания могут появиться усовершенствования и изменения. Настоящее изобретение предназначено для того, чтобы оно могло толковаться, включая такие усовершенствования и изменения до такой степени, пока они соответствуют пределам и объему прилагаемой формулы изобретения или эквиваленту таковой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИМИЗАЦИЯ ПРЕОБРАЗОВАТЕЛЯ СФОКУСИРОВАННОГО УЛЬТРАЗВУКА ВЫСОКОЙ ИНТЕНСИВНОСТИ | 2010 |
|
RU2563061C2 |
| ОЦЕНКА ЛЕЧЕНИЯ С ИСПОЛЬЗОВАНИЕМ УЛЬТРАЗВУКОВЫХ КОНТРАСТНЫХ ВЕЩЕСТВ | 2009 |
|
RU2492812C2 |
| СИНХРОНИЗИРОВАННАЯ С ДЫХАТЕЛЬНЫМИ ДВИЖЕНИЯМИ ОЦЕНКА ЭФФЕКТИВНОСТИ ЛЕЧЕНИЯ С ПРИМЕНЕНИЕМ УЛЬТРАЗВУКОВЫХ КОНТРАСТНЫХ ВЕЩЕСТВ | 2009 |
|
RU2494674C2 |
| СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ПОКАЗАТЕЛЕЙ ЖИЗНЕДЕЯТЕЛЬНОСТИ С ИСПОЛЬЗОВАНИЕМ КАМЕРЫ | 2013 |
|
RU2635479C2 |
| СЕГМЕНТАЦИЯ ИССЛЕДУЕМОЙ ОБЛАСТИ, УПРАВЛЯЕМАЯ ОТСЛЕЖИВАНИЕМ ВЗГЛЯДА | 2015 |
|
RU2673975C2 |
| ПРОЕКЦИЯ МАГНИТНОГО РЕЗОНАНСА ДЛЯ ПОСТРОЕНИЯ ЧЕТЫРЕХМЕРНОЙ ВИЗУАЛИЗАЦИИ | 2015 |
|
RU2658135C1 |
| ИСПОЛЬЗОВАНИЕ КОЛЛЕКЦИИ ПЛАНОВ ДЛЯ РАЗРАБОТКИ НОВЫХ ЗАДАЧ ОПТИМИЗАЦИИ | 2010 |
|
RU2566974C2 |
| КОНФИГУРИРОВАНИЕ АКТИВНОЙ КАНЮЛИ ДЛЯ МИНИМАЛЬНО ИНВАЗИВНОЙ ХИРУРГИИ | 2007 |
|
RU2445934C2 |
| МЕДИЦИНСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КАРТЫ МАКСИМАЛЬНОЙ ЭНЕРГИИ | 2013 |
|
RU2661780C2 |
| СИСТЕМА И СПОСОБ ПАРАМЕТРИЧЕСКОЙ УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ С КОНТРАСТИРОВАНИЕМ И ПРИВЯЗКОЙ КО ВРЕМЕНИ | 2018 |
|
RU2764500C2 |
Изобретение относится к обработке медицинских изображений. Техническим результатом является повышение точности оценки движения интересующей ткани. Способ содержит: задание набора опорных местоположений около интересующей области субъекта или объекта, которую идентифицируют на, по меньшей мере, одном изображении из временной последовательности изображений; применение модели движения к опорному местоположению упомянутого набора, причем модель движения указывает траекторию через последовательность изображений; формирование набора записанных изображений из временной последовательности изображений, посредством одновременной записи временной последовательности изображений на основе модели, примененной к опорному местоположению упомянутого набора. 2 н. и 13 з.п. ф-лы, 2 ил.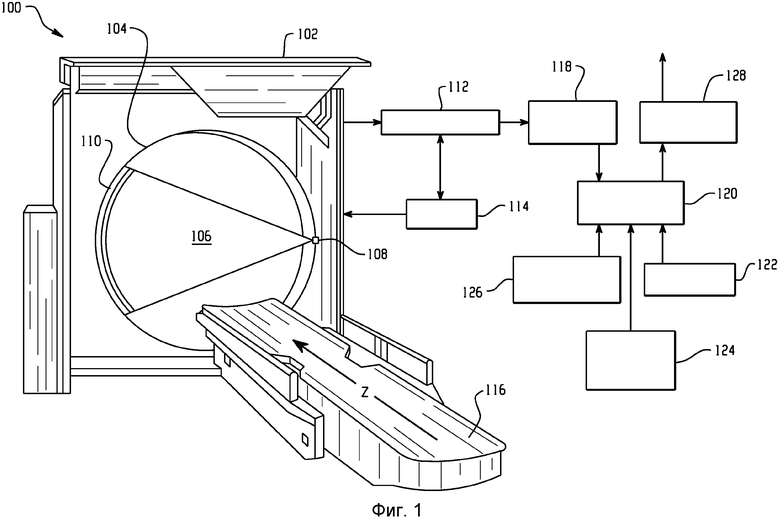
1. Способ формирования набора групповых изображений, содержащий:
задание набора опорных местоположений около интересующей области субъекта или объекта, которую идентифицируют на, по меньшей мере, одном изображении из временной последовательности изображений;
применение модели движения к опорному местоположению упомянутого набора, причем модель движения указывает траекторию через последовательность изображений;
формирование набора записанных изображений из временной последовательности изображений, посредством одновременной записи временной последовательности изображений на основе модели, примененной к опорному местоположению упомянутого набора.
2. Способ по п.1, в котором траектория проходит через временную последовательность последовательности изображений.
3. Способ по п.1, в котором траектория оценивает движение опорного местоположения от изображения к изображению через последовательность изображений.
4. Способ по п.3, дополнительно содержащий: задание набора выборочных точек около опорного местоположения; и
сведение к минимуму изменений в информации передаваемого изображения на основе набора выборочных точек.
5. Способ по п.4, в котором сведение к минимуму изменений включает в себя сведение к минимуму средних изменений значения серого вблизи траектории через последовательность изображений.
6. Способ по любому из пп.1-5, в котором модель движения основана на циклическом движении.
7. Способ по любому из пп.1-4, в котором модель движения включает в себя один или более свободных параметров и который дополнительно включает в себя определение одного или более свободных параметров на основе изображений во время записи.
8. Способ по любому из пп.1-4, дополнительно содержащий распространение интересующей области по последовательности записанных групповых изображений.
9. Способ по любому из пп.1-4, в котором модель движения моделирует, по меньшей мере, один дыхательный или сердечный цикл.
10. Способ по любому из пп.1-4, в котором групповая запись является локальной к интересующей области.
11. Система для формирования набора групповых изображений, содержащая:
устройство (118), идентифицирующее интересующую область, которое идентифицирует интересующую область на, по меньшей мере, одном изображении из ряда изображений двигающегося объекта;
устройство (124), идентифицирующее опорное местоположение, которое идентифицирует множество опорных местоположений около интересующей области;
банк (122) моделей, который включает в себя одну или более моделей, указывающих циклическое движение двигающегося объекта; и
компонент (120) записи, который записывает изображения на основе модели движения из банка (122) моделей и изображений посредством применения модели движения к изображениям в опорном местоположении из опорных местоположений и одновременной записи ряда изображений, при этом модель движения указывает циклическую траекторию через ряд изображений.
12. Система по п.11, в которой модель включает в себя, по меньшей один, свободный параметр и компонент (120) записи определяет свободный параметр на основе опорного местоположения.
13. Система по п.12, дополнительно содержащая:
устройство (126), идентифицирующее выборочные точки, которое идентифицирует множество выборочных точек около опорного местоположения, причем компонент (120) записи сводит к минимуму изменения в информации передаваемого изображения для (122) на основе множества выборочных точек.
14. Система по любому из пп.11-13, дополнительно содержащая:
устройство, распространяющее интересующую область (118), которое распространяет интересующую область через записанную последовательность изображений.
15. Система по любому из пп.11-14, в которой запись уменьшает пропускание искажений парной анатомической модели, основанной на записи изображения.
| Sarrut D | |||
| et al, "A Comparison Framework for Breathing Motion Estimation Methods From 4-D Imaging", IEEE Transactions of Medical Imaging, vol | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Georg M | |||
| et al, "Simultaneous Data Volume Reconstruction and Pose Estimation From Slice Samples", Computer Vision and Pattern Recognition, IEEE computer Society, 2008 | |||
| US20080279428 A1, 13.11.2008 | |||
| СПОСОБ ИССЛЕДОВАНИЯ ВНУТРЕННИХ ОРГАНОВ И ТКАНЕЙ ЧЕЛОВЕКА | 2003 |
|
RU2256397C1 |

