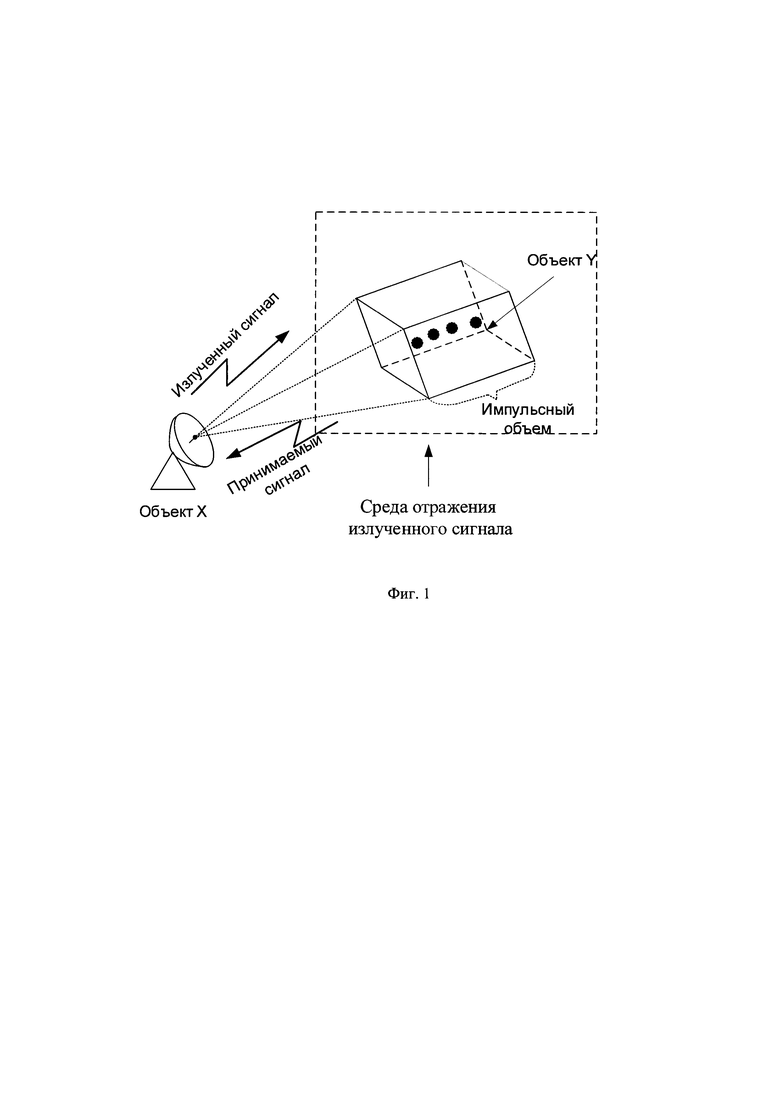
Изобретение относится к теории разрешения, распознавания, восстановления сигналов и предназначено для формирования дальностного портрета воздушного объекта (ВО), отражающего излученный радиолокатором сигнал с перестройкой частоты от импульса к импульсу, при нахождении ВО в пределах импульсного объема излученного сигнала (фиг. 1).
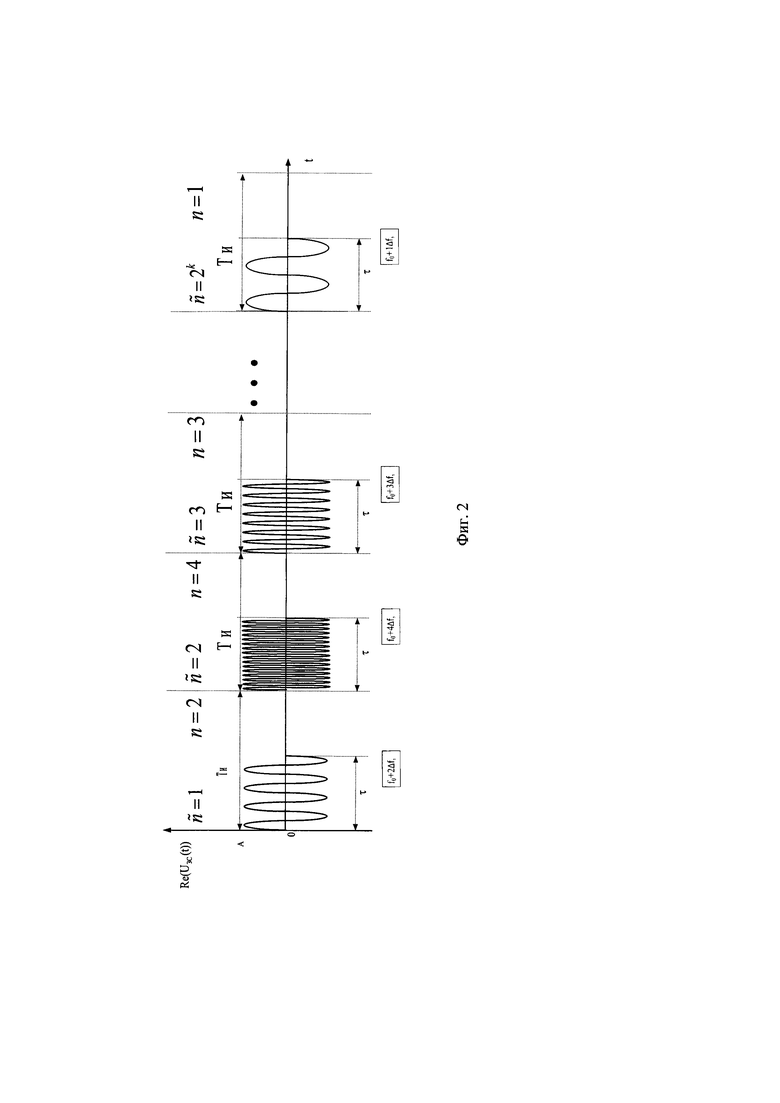
Известен способ измерения радиальной скорости воздушной цели в режиме перестройки частоты от импульса к импульсу [1]. Способ предназначен для определения радиальной скорости воздушного объекта (воздушной цели), с последующим использованием данной информации для формирования дальностного портрета, получаемого на основе использования сигналов с перестройкой частоты от импульса к импульсу. По сути, это способ формирования дальностного портрета ВО при неизвестной радиальной скорости его движения. Данный способ заключается в том, что в течение времени Δt, ограниченного интервалом угловой корреляции поворота воздушного объекта Тук [1], составляющим величину не более 5 мс [2, 3], излучают с помощью приемопередатчика радиолокатора (объект X) в свободное пространство зондирующий сигнал (ЗС) Uзс(t) (фиг. 1). Данный ЗС представляет собой пачку 2k импульсных сигналов с перестройкой частоты (СПЧ) по случайному закону, где k - целое число, принимающее значение от 6 до 8 (фиг. 2). Число импульсных сигналов удобнее принять равным 2k, так как в этом случае при обработке без добавления нулевых отсчетов можно использовать алгоритмы быстрого преобразования Фурье, что позволяет существенно уменьшить объем вычислений и ускорить получение результата вычислений [4].
Согласно способу в оперативном запоминающем устройстве формируют последовательность величин частот, используемых в пачке СПЧ, от f0 до f0+Fпер, где f0 - основная несущая частота зондирующего сигнала сантиметрового диапазона, Fпep=150 МГц - диапазон, в котором осуществляется перестройка частоты от импульса к импульсу с шагом  , где N - число используемых частот. Затем номера частот излучения распределяют по случайному закону, при котором время излучения tn от начала пачки для импульса на n-й частоте f0+nΔf, где n - номер используемой частоты
, где N - число используемых частот. Затем номера частот излучения распределяют по случайному закону, при котором время излучения tn от начала пачки для импульса на n-й частоте f0+nΔf, где n - номер используемой частоты , определяется по формуле
, определяется по формуле
где Ти - период повторения импульсов внутри пачки; - порядковый номер излучения импульса на n-й частоте f0+nΔf, принимающий значение от 1 до N, единожды повторяющееся в пределах пачки СПЧ. Порядок использования частот запоминается для последующей расстановки принятых сигналов в порядке линейного увеличения частоты. Величина Ти выбирается, исходя из требования обеспечения однозначности отсчетов по доплеровской частоте во всем диапазоне возможных радиальных скоростей ВО [5], что в символьном виде выражается неравенством
- порядковый номер излучения импульса на n-й частоте f0+nΔf, принимающий значение от 1 до N, единожды повторяющееся в пределах пачки СПЧ. Порядок использования частот запоминается для последующей расстановки принятых сигналов в порядке линейного увеличения частоты. Величина Ти выбирается, исходя из требования обеспечения однозначности отсчетов по доплеровской частоте во всем диапазоне возможных радиальных скоростей ВО [5], что в символьном виде выражается неравенством

где  - частота повторения импульсов внутри пачки;
- частота повторения импульсов внутри пачки;
Fд max=2Vр max(f0+Fпep)/c - максимально возможная доплеровская частота воздушного объекта;
Vp max - максимально возможная радиальная скорость ВО.
После отражения ЗС от ВО Y (фиг. 1) на вход приемника радиолокатора (объект X) поступают отраженные сигналы (ОС) на разных частотах f0+nΔf+Fд n, где Fд n - доплеровская частотная добавка отраженного сигнала на n-й частоте, обусловленная радиальной скоростью ВО.
Принимают с помощью радиолокатора отраженные на разных частотах сигналы.
Понижают частоту принимаемых сигналов до промежуточной fпp, чтобы после перехода с несущей f0 на промежуточную fпp частоту отраженный сигнал на n-й частоте соответствовал зависимости fпр+nΔf+Fд n=fпp n+Fд n где fnp n=Fпp+nΔf, используют для дальнейшего усиления и обработки N частотных каналов, входные фильтры которых обеспечивают проникновение в n-й частотный канал отраженных сигналов только на n-й промежуточной частоте с соответствующей доплеровской добавкой fпp n+Fд n
Затем выделяют с помощью квадратурных фазовых детекторов [5, 6] значения квадратурных составляющих принятых сигналов, преобразовывают квадратурные составляющие принятых сигналов в цифровую форму с помощью аналого-цифровых преобразователей (АЦП) с частотой дискретизации Fd не менее Fd=2(fпр+FдN), преобразовывают каждый оцифрованный отраженный на n-й частоте сигнал в комплексную форму вида

где  - амплитуда отраженного на n-й частоте сигнала;
- амплитуда отраженного на n-й частоте сигнала;
 - фаза отраженного на n-й частоте сигнала;
- фаза отраженного на n-й частоте сигнала;
 - значения квадратурных составляющих принятого сигнала на n-й частоте.
- значения квадратурных составляющих принятого сигнала на n-й частоте.
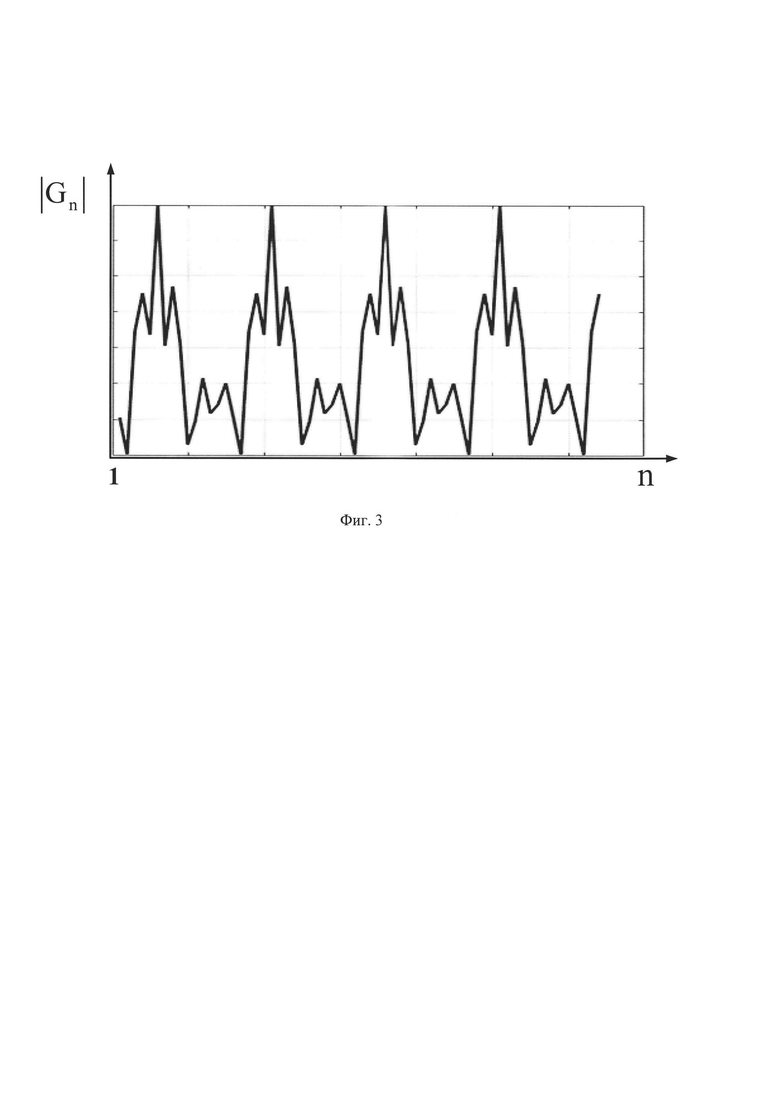
Формируют вектор G из N элементов (фиг. 3), записывают в n-й элемент вектора G комплексное значение  отраженного сигнала на n-й частоте, при этом значения принятых сигналов внутри вектора G расставляют в порядке, соответствующем линейно-ступенчатому изменению частоты. На фиг.3 показаны графически модульные значения элементов вектора G. При такой расстановке принятые сигналы совместно представляют собой частотную характеристику (ЧХ) ВО.
отраженного сигнала на n-й частоте, при этом значения принятых сигналов внутри вектора G расставляют в порядке, соответствующем линейно-ступенчатому изменению частоты. На фиг.3 показаны графически модульные значения элементов вектора G. При такой расстановке принятые сигналы совместно представляют собой частотную характеристику (ЧХ) ВО.
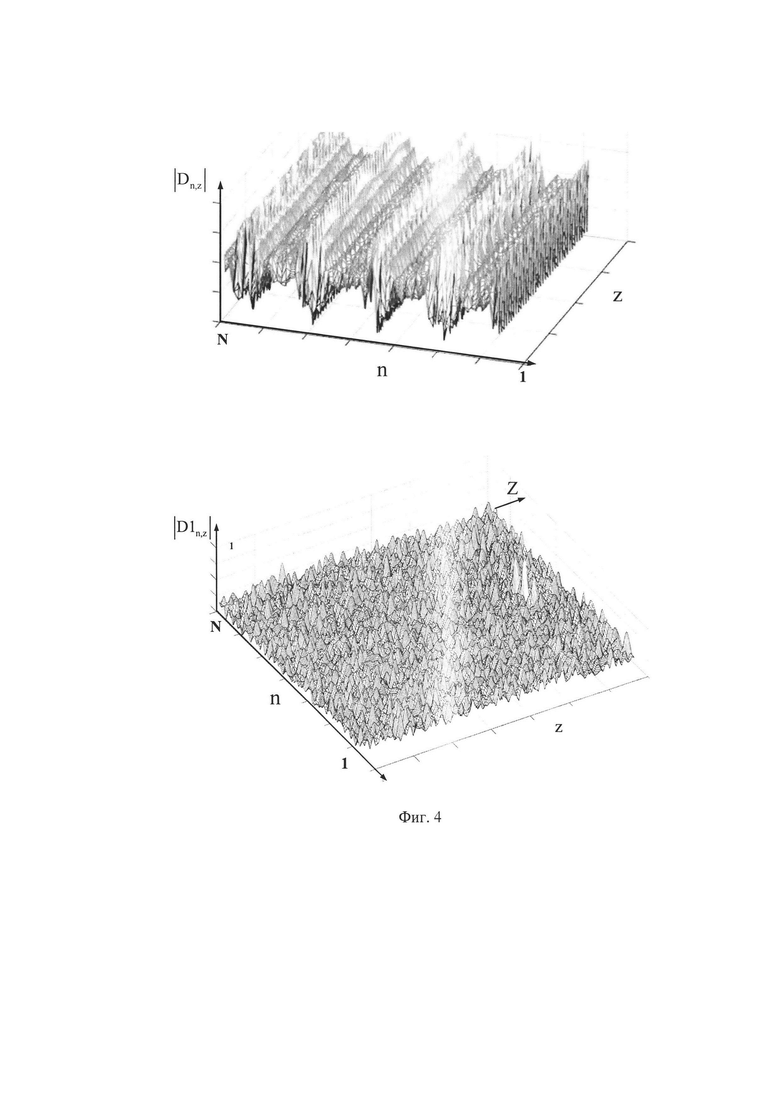
Формируют двумерную матрицу D данных из N строк и Z=2Vp max/dV+1 столбцов, где число 2 определяет возможность измерения положительных и отрицательных радиальных скоростей (при приближении или удалении объекта), Vp max - максимально возможная радиальная скорость ВО, выбираемая заблаговременно, dV - интервал дискретизации (шаг изменения) радиальной скорости, определяющий точность измерения радиальной скорости. В элемент n-й строки z-го столбца матрицы D (фиг. 4) записывают комплексную величину , рассчитанную по формуле
, рассчитанную по формуле

где  - комплексная величина n-го элемента вектора G.
- комплексная величина n-го элемента вектора G.
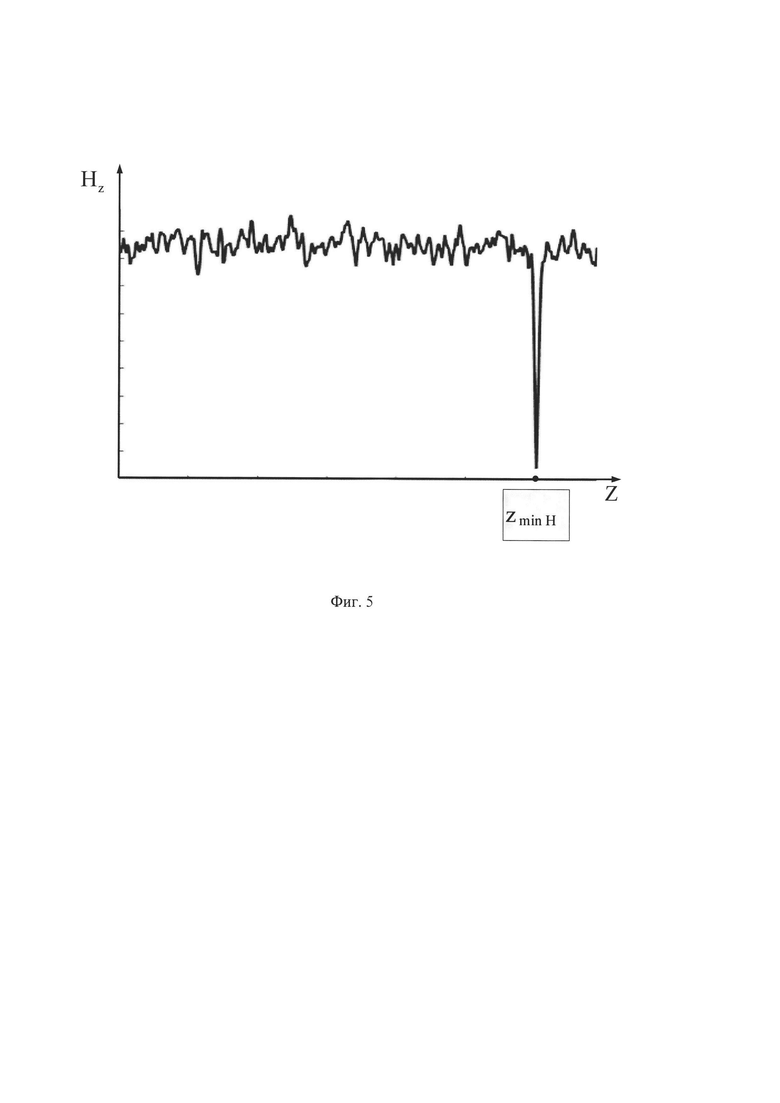
Путем проведения обратного быстрого преобразования Фурье с комплексными векторами данных каждого z-го столбца матрицы D получают матрицу D1, после чего находят максимальное значение модуля комплексного сигнала в матрице D1 делят комплексные величины всех элементов матрицы D1 на это значение, т.е. нормируют элементы матрицы D1 (фиг. 4), а затем - рассчитывают величину энтропии данных Hz [7] для каждого z-ro столбца матрицы D1 по формуле
На конечном этапе находят номер столбца Zmin H, соответствующего наименьшему значению энтропии Hz min (фиг. 5), с помощью которого определяют оценку радиальной скорости  по формуле
по формуле

и принимают эту оценку в качестве измеренного значения радиальной скорости VPBO.
Устраняют фазовые искажения, обусловленные наличием радиального движения ВО, для чего последовательно умножают каждый n-й член вектора G(ЧХ ВО) на специальный множитель согласно формуле

В последующий массив Uискn подвергают дискретному обратному преобразованию Фурье [8] с использованием формулы, для m-го члена формируемого вектора:
где m - номер отчета во временной области m=1…K.
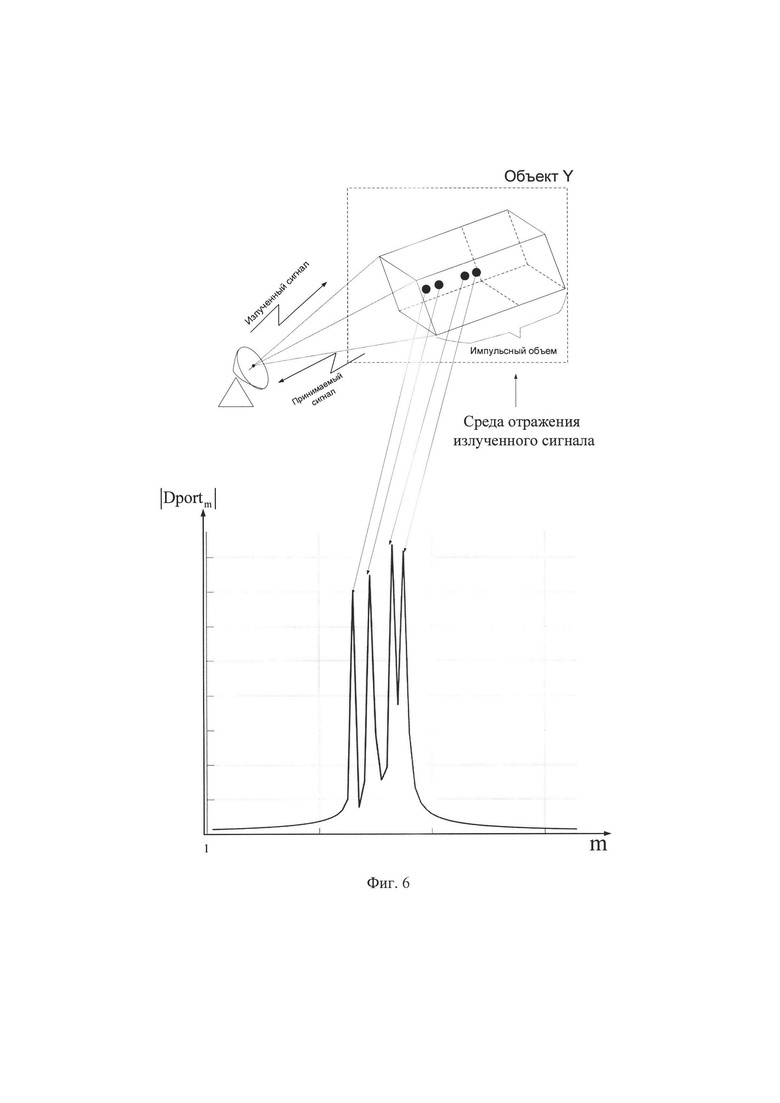
В результате данного преобразования получают массив Dport, элементы которого совместно представляют собой импульсную характеристику во-ВО, а будучи почленно умноженной на скорость света - дальностный портрет ВО. Графически дальностный портрет представляют в виде совокупности модульных значений |Dportm| массива Dport (фиг. 6).
Сущность способа, а именно сущность процесса формирования дальностного портрета заключается в том, что при использовании случайного закона перестройки частоты каждый отсчет ЧХ будет иметь случайную фазовую добавку, зависящую от номера импульса на n-й частоте, порядка и шага перестройки частоты, а также радиальной скорости ВО. Для формирования истинного дальностного портрета ВО необходимо устранять фазовые набеги, зависящие от перечисленных факторов [9, 14]. Поскольку порядок использования частот и шаг перестройки частоты известны, то для устранения негативных фазовых набегов, искажающих структуру формируемого дальностного портрета, необходимо знать только скорость ВО. Поэтому для компенсации случайного изменения фазы в элементах ЧХ предложено воспользоваться методом подбора значения Vp. При переборе всех возможных значений радиальной скорости от -Vp max до + Vp max в одном из случаев произойдет наилучшая компенсация фазовых искажений, связанных с радиальным перемещением ВО, и в результате проведения с перефазированной ЧХ обратного преобразования Фурье будет сформирован информативный дальностный портрет.Геометрическая конструкция ВО (количество рассеивателей на его поверхности и расстояния между ними) и вид дальностного портрета тоже являются неизвестными. В качестве критерия определения максимального совпадения истинной радиальной скорости ВО с изменяемым с шагом dV в интервале от -Vp max до + Vp max предполагаемым значением радиальной скорости ВО предложено использовать минимум энтропии вектора данных [7].
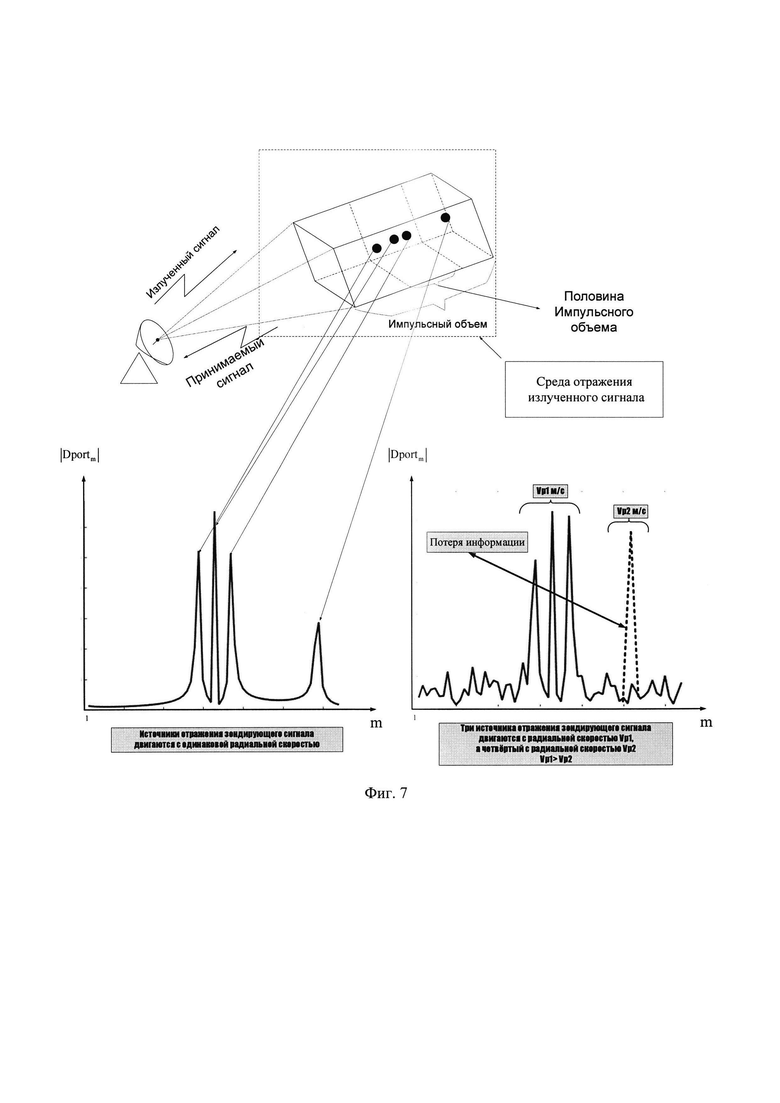
Недостатком способа [1] формирования дальностного портрета является возможное снижение амплитуд комплексных откликов в массиве Dportm в условиях, когда рассредоточение (взаимное удаление) источников отражения превышает половину протяженности импульсного объема, при их перемещении с одинаковой радиальолной скоростью относительно объекта X. Причем, при перемещении источников отражения относительно объекта X с разной радиальной скоростью, дальностный портрет может быть сформирован с потерей информации о количестве источников отражения.
Данный эффект обусловлен тем, что для процесса построения дальностного портрета используется лишь одна частотная характеристика отражения, сформированная вблизи точки сосредоточения максимума мощности принимаемого сигнала. Однако при этом не учитывается возможность распределения источников отражения по всей протяженности (дальности) импульсного объема (фиг. 7) и оценки изменения их радиальной скорости. Взаимное удаление рассеивателей относительно друг друга приводит к искажению информации об амплитуде некоторых источников отражения, что снижает информативность формируемого дальностного портрета. Так на фиг. 7 показано, что амплитуда наиболее удаленного рассеивателя из состава ВО в портрете существенно уступает остальным амплитудам, хотя отражательная способность всех рассеивателей при моделировании принималась одинаковой, а при его радиальной скорости отличной от основной группы рассеивателей, информация о нем теряется вовсе.
Задачей изобретения является формирование дальностного портрета, на основе использования сигналов с перестройкой частоты от импульса к импульсу, за счет оценивания радиальной скорости ВО по множеству частотных характеристик отражения (в пределах интервала дальности обнаружения).
Для решения поставленной задачи предлагается использования весь возможный набор частотных характеристик воздушного объекта, выделяемых при согласованной обработке отражений на разных частотах.
Операции, выражающие существо предлагаемого способа формирования дальностного портрета получаемого на основе использования сигналов с перестройкой частоты от импульса к импульсу за счет построения характеристики изменения радиальной скорости воздушного объекта, могут быть описаны следующей совокупностью последовательных действий:
1) излучение ЗС объектом X;
2) отражение ЗС воздушным объектом Y;
3) прием отраженных сигналов (ОС) с последующим понижением частоты принимаемых сигналов до промежуточной, распределение ОС разных частот по N частотным каналам, каждый из которых настроен на одну из N частот, что обеспечивает поступление в n-й канал сигнала только на n-й промежуточной частоте fпp+nΔf;
4) выделение с помощью квадратурных фазовых детекторов всех значений квадратурных составляющих ОС в каждом n-.м частотном канале;
5) преобразование квадратурных составляющих ОС в каждом n-м частотном канале в цифровую форму  с помощью аналого-цифровых преобразователей (АЦП);
с помощью аналого-цифровых преобразователей (АЦП);
6) формирование двумерной сигнальной матрицы Kсигn,w, имеющей N строк и  столбцов (w=1…N2) с последовательной записью в ее строки принятых оцифрованных сигналов в комплексной форме
столбцов (w=1…N2) с последовательной записью в ее строки принятых оцифрованных сигналов в комплексной форме в порядке, соответствующем линейно-ступенчатому изменению частоты, где Тзадmax - время задержки сигнала, отраженного объектом на максимальной дальности;
в порядке, соответствующем линейно-ступенчатому изменению частоты, где Тзадmax - время задержки сигнала, отраженного объектом на максимальной дальности;
7) проведение корреляционной обработки в каждом частотном канале с формированием двухмерной матрицы , состоящей из N строк и N2 столбиков;
, состоящей из N строк и N2 столбиков;
8) последовательное формирование вектора Gkor, состоящего из N элементов, в n-й элементов каждого столбца двухмерной матрицы  ;
;
9) формирование двухмерной матрицы данных Dkor из N строк и  столбцов, причем в элемент n-й строки z-го столбца матрицы Dkor записывают результаты последовательного произведения вектора
столбцов, причем в элемент n-й строки z-го столбца матрицы Dkor записывают результаты последовательного произведения вектора  , сформированного для каждого столбца двумерной матрицы
, сформированного для каждого столбца двумерной матрицы , на возможный диапазон изменения радиальной скорости ВО, по специальной формуле;
, на возможный диапазон изменения радиальной скорости ВО, по специальной формуле;
10) проведение обратного быстрого преобразования Фурье с комплексными векторами данных каждого столбца матрицы Dkor и фиксация результатов преобразования в соответствующих строках двумерной матрицы Dkor1;
11) расчет величины энтропии данных Hkorz; для каждого z-го столбца матрицы Dkor1 по специальной формуле;
12) определение порядкового номера zkormin H элемента вектора Hkorz, имеющего минимальное значение и расчет с помощью его значения радиальной скорости ВО по специальной формуле;
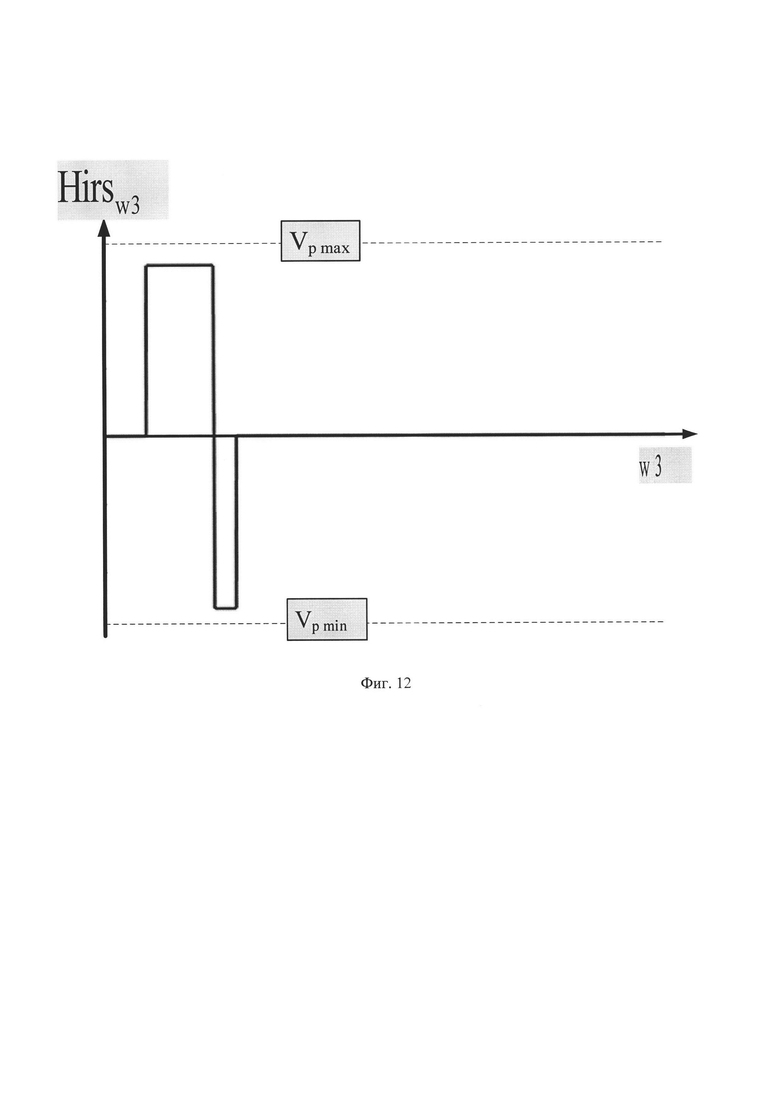
13) формирование вектора Hirs состоящего из N2 элементов, в который записывается оценка измеренного значения радиальной скорости ВО для каждого столбца двумерной матрицы;, представляющий собой характеристику изменений радиальной скорости ВО;
14) формирование двумерной матрицы Кор за счет последовательного поэлементарного перемножения элементов двумерной матрицы Kor, с элементами двумерной матрицей Opor, состоящей из N строк и N2=Тзадmax⋅Fd столбцов, в каждой строке которой записаны значения оцифрованного опорного сигнала, получаемые по специальной формуле;
15) формирование двумерной матрицы Kиск за счет последовательного- поэлементного перемножения каждого столбца матрицы на специальный фазовый множитель, компенсирующий фазовые искажения, обусловленные наличием радиального движения ВО учтенной собой характеристикой изменения радиальной скорости;
16) формирование двумерной матрицы HKS за счет последовательного- обратного дискретного преобразования Фурье с данными каждого столбца двумерной матрицы Kиск, представляющей собой весь возможный набор ЧХ количество которых равно N2=Тзадmax⋅Fd;
17) формирование дальностного портрета повышенной информативности- за счет отбора максимальных по модулю значений в каждой строке двумерной матрицы HKS.
Рассмотрим последовательно процедуру формирования дальностного портрета повышенной информативности, формируемого за счет оценивания множество частотных характеристик отражения.
Процедура с 1-го по 3-й пункт соответствует прототипу [1].
После прохождения n-го частотного канала приемника принимаемые сигналы оцифровываются при помощи АЦП с частотой дискретизации не менее Fd=2⋅(Fпр+FдN) и преобразовываются в форму следующего вида
где  - амплитуда отраженного на n-й частоте сигнала
- амплитуда отраженного на n-й частоте сигнала
 - фаза отраженного на n-й частоте сигнала;
- фаза отраженного на n-й частоте сигнала;
 - значение квадратурных составляющих принятого сигнала на n-й частоте.
- значение квадратурных составляющих принятого сигнала на n-й частоте.
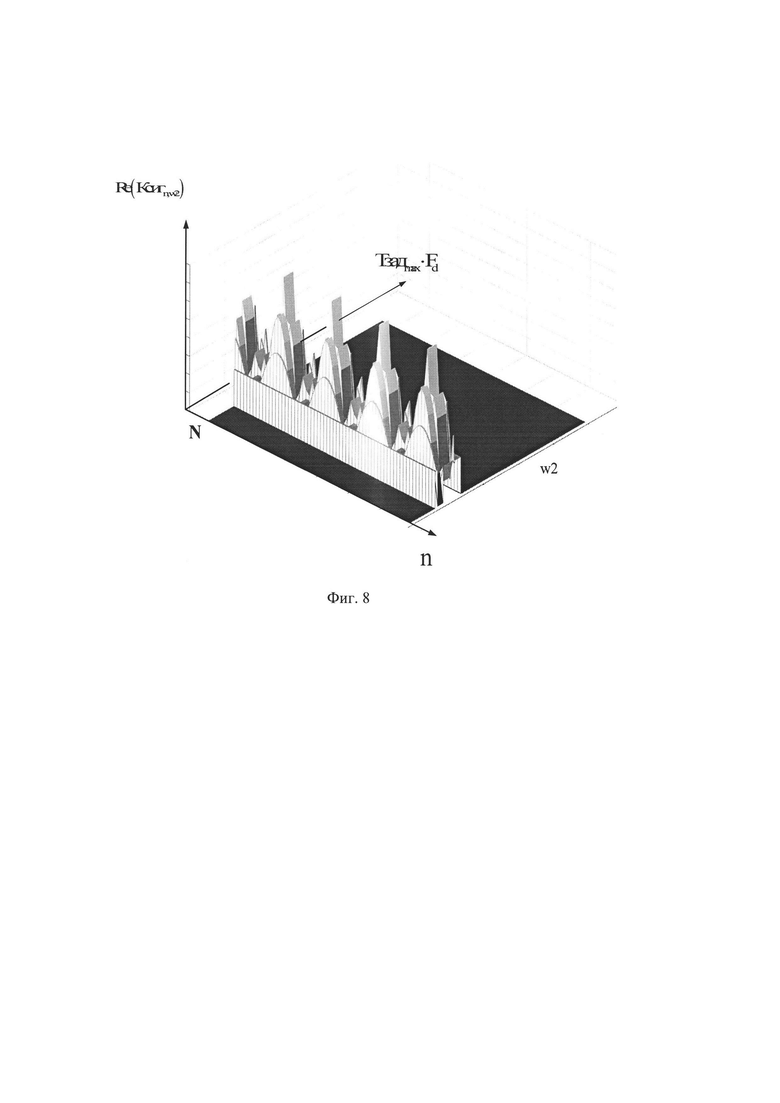
Формируют двухмерный сигнальный массив Kсигn,w, имеющий N строк и N2=Tзадmax⋅Fd столбцов (w=1…N2) с последовательной записью в его строки принятых оцифрованных сигналом в комплексной форме  в порядке, соответствующем линейно- ступенчатому изменению частоты(фиг. 8).
в порядке, соответствующем линейно- ступенчатому изменению частоты(фиг. 8).
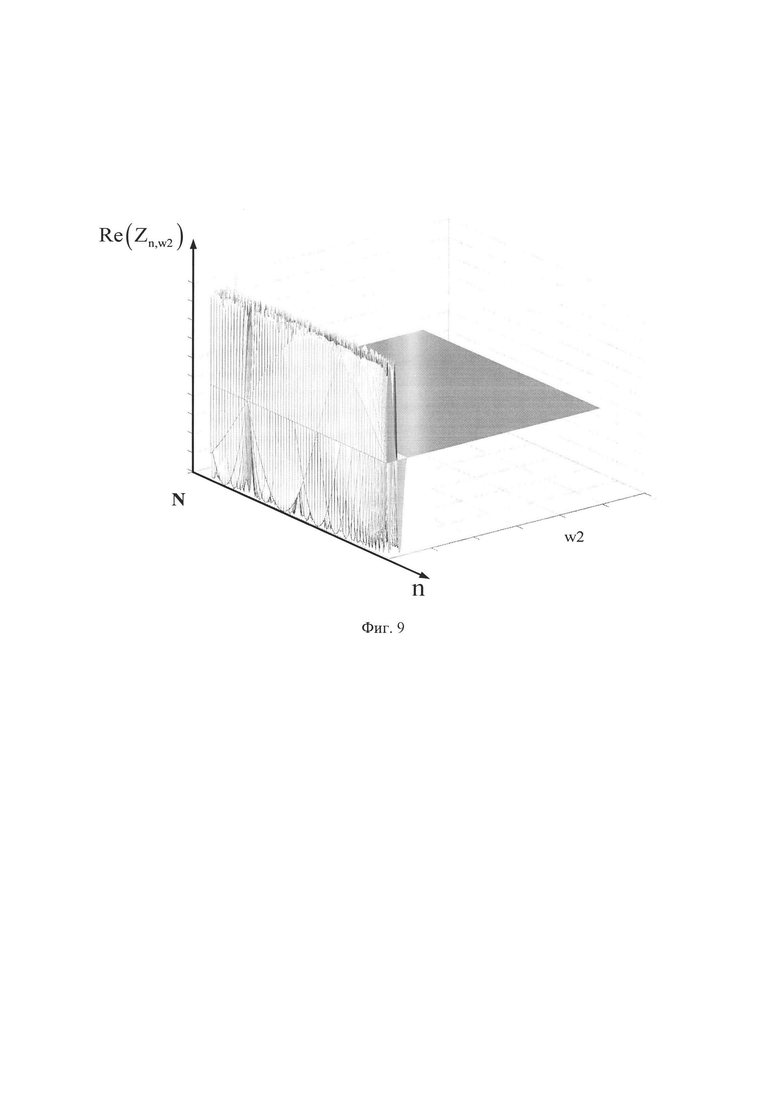
Формируют двумерный массив зондирующих сигналов Zn,w2, имеющий Nстрок и N столбцов. Причем в каждой n-й строке массива Zn,w2 предварительно записываются оцифрованные зондирующие сигналы (ОЗС) в порядке, соответствующем линейно-ступенчатому изменению частоты (фиг. 9)

где τ - длительность каждого импульса из пачки СПЧ, А амплитуда каждого импульса, ϕ0 - начальная фаза (по умолчанию равна 0), fпр n=fпр+nΔf.
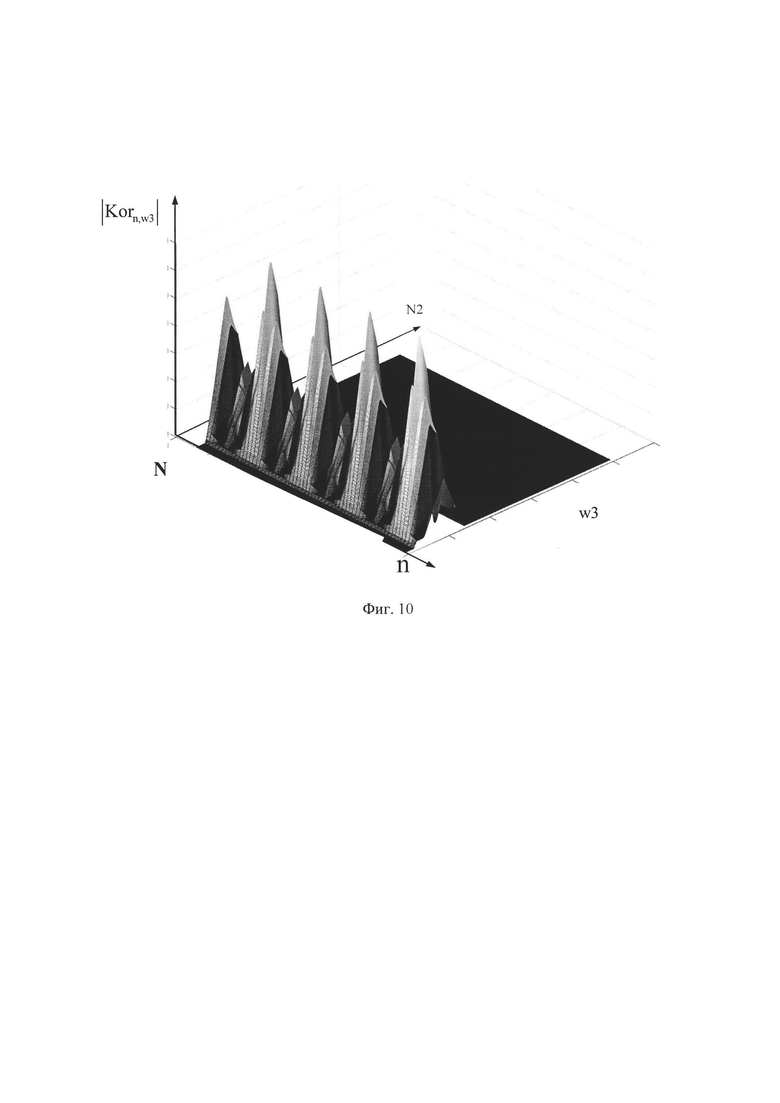
В дальнейшем проводят корреляционную обработку с элементами массив Kсигn,w и Zn,w2 по формуле
где  - знак комплексного сопряжения, а w3=1…N2 (фиг. 10), а результат записывают в массив
- знак комплексного сопряжения, а w3=1…N2 (фиг. 10), а результат записывают в массив  .
.
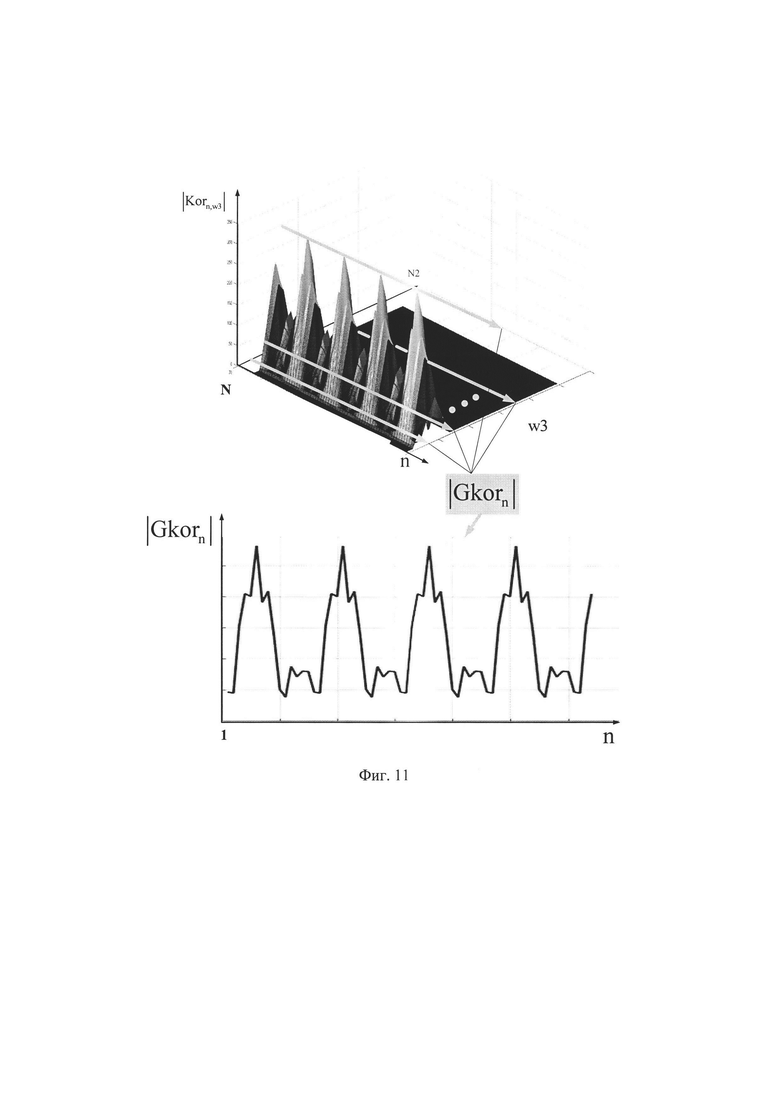
После чего, последовательно, элементы из каждого w3-го столбца массива  записывают в вектор Gkor, состоящий из N элементов, который будет представлять собой частотную характеристику (ЧХ) ВО полученную для каждого w3-го столбца массива
записывают в вектор Gkor, состоящий из N элементов, который будет представлять собой частотную характеристику (ЧХ) ВО полученную для каждого w3-го столбца массива  (фиг. 11)
(фиг. 11)
После чего формируют двумерную матрицу Dkor данных из N строк и  столбцов, где число 2 определяет возможность измерения положительных и отрицательных радиальных скоростей (при приближении или удалении объекта), Vp max - максимально возможная радиальная скорость ВО, выбираемая заблаговременно, dV - интервал дискретизации (шаг изменения) радиальной скорости, определяющей точность измерения радиальной скорости. В элемент n-й строки z-го столбца матрицы Dkor записывают результат последовательного произведения вектора
столбцов, где число 2 определяет возможность измерения положительных и отрицательных радиальных скоростей (при приближении или удалении объекта), Vp max - максимально возможная радиальная скорость ВО, выбираемая заблаговременно, dV - интервал дискретизации (шаг изменения) радиальной скорости, определяющей точность измерения радиальной скорости. В элемент n-й строки z-го столбца матрицы Dkor записывают результат последовательного произведения вектора  сформированного для каждого w3-го столбца массива
сформированного для каждого w3-го столбца массива  на возможный диапазон изменения радиальной скорости по формуле
на возможный диапазон изменения радиальной скорости по формуле

Далее путем проведения обратного быстрого преобразования Фурье с комплексными векторами данных каждого столбца матрицы Dkor (по аналогии со способом [1]) получают матрицу Dkor1, после чего находят максимальное значение модуля комплексного сигнала в матрице Dkor1 и делят комплексные величины всех элементов Dkor1 на это значение, т.е. нормируют элементы матрицы Dkor1 (фиг. 4), а затем рассчитывают величину энтропии данных Hkorz [7] для каждого z-го столбца матрицы Dkor1 по формуле

Определяют номер столбца zkormin H, соответствующей наименьшему значению энтропии Hkorz min (по аналогии со способом [1], с помощью которого находят оценку радиальной скорости ВО  по формуле
по формуле

и принимают оценку в качестве измеренного значения радиальной скорости ВО в 1-й момент времени.
После чего формируют вектор Hirs состоящий из N2 элементов, записывая в его w3-й элемент оценку измеренного значения радиальной скорости ВО для каждого w3-го столбца массива  Сформировав таким образом вектор Hirsw3, будет представлять собой характеристику изменения радиальной скорости ВО (ХИРС) (фиг. 12).
Сформировав таким образом вектор Hirsw3, будет представлять собой характеристику изменения радиальной скорости ВО (ХИРС) (фиг. 12).
Используют заранее записанный в память ЭВМ двумерный массив Oporn,w,3 (фиг. 13), состоящей из N строк и N2=Tзадmax⋅Fд столбцов, в каждой строке которой записаны значения оцифрованного опорного сигнала в порядке линейно-ступенчатого изменения частоты согласно формуле

В дальнейшем предложено проводить поэлементное перемножение элементов массива Korn,w,3 с элементами массива Ороrn,w,3 по формуле
После этого устраняют фазовые искажения, обусловленные наличием радиального движения источников отражения зондирующего сигнала ВО, для чего последовательно умножают каждый w3-й член каждого столбца массива Kоpn,w,3 на специальный множитель  определяемый по формуле
определяемый по формуле

а результат записывают в сформированный двумерный массив  .
.
После этого для каждого столбца массива Kискn,w,3 проводят дискретное обратное преобразование Фурье [8], а результат преобразования записывают в двумерный массив НKSm,w,3 (фиг. 14). Для формирования дальностного портрета повышенной информативности, предложено анализировать модуль каждого п-го члена каждой строки массива HKSm,w,3 на предмет наличия максимального значения и записывать его последовательно в вектор Dport2m (фиг. 15).
Результатом данного преобразования будет вектор Dport2m, представляющий собой дальностный портрет ВО (фиг. 16), в котором адекватно отображается амплитудная информация об источниках отражения, взаимное расположение которых превышает по протяженности половину импульсного объема, а так же скомпенсированы искажения вносимые измененим их радиальной скорости приводящие к потере информации о их количестве.
На фиг. 17 представлены результаты формирования дальностного портрета одного и того же ВО с помощью прототипа [1] и предлагаемого способа.
Воздушный объект моделировался в виде четырех рассеивателей, последний из которых удален от остальных и имеет радиальную скорось отличную от первых трех рассеивателей на 20%. Отражательные способности всех рассеивателей были одинаковы. Видно, что при большой протяженности ВО, превосходящей половину импульсного объема, информация об амплитуде последнего удаленного рассеивателя при использовании прототипа отсутствует. При использовании предлагаемого способа амплитуды всех рассеивателей соизмеримы и восстановлены, что соответствует свойствам модели ВО.
Сущность предложенного способа формирования дальностного портрета заключается в следующем.
В известном способе [1] для формирования дальностных портретов используется одна частотная характеристика ВО, которая соответствует сосредоточению максимума мощности принимаемого сигнала на каждой частоте. Однако при наличии протяженного ВО, продольные размеры которого превышают половину импульсного объема, имеющего локальное сосредоточение нескольких источников отражения и удаление одного из рассеивателей, на выходе квадратурных фазовых детекторов для построения портрета будут отобраны те максимальные значения отраженного ЗС, которые соответствуют временному положению сосредоточенных источников отражения ЗС. Это приводит к тому, что в формируемой таким образом одной ЧХ энергетическая составляющая отдаленных источников отражения теряется, что приводит к снижению информативности полученного на ее основе дальностного портрета. Причем, если у источников отражения зондирующего сигнала радиальные скорости разные, искажение портрета выражается в отсутствие амплитуды тех откликов, радиальная скорость которых не соответствует радиальной скорости полученой по частотной характеристике сформированной из максимумов амплитуд корреляционной обработки.
Для устранения указанного недостатка с целью повышения информативности дальностного портрета, предложено проанализировать множество частотных характеристик ВО и определить в них радиальную скорость каждого источника отражения зондирующего сигнала, при этом формируя характеристику изменения радиальной скорости в каждом дальностном канале обнаружения ВО.
После чего, предложено провести предварительную операцию последовательного перемножения результата корреляционной обработки в каждом частотном канале с комплексно-сопряженным оцифрованным опорным сигналом для выделения информации о всех источниках отражения ЗС. Данная информация будет заключена в разности фаз оцифрованного опорного сигнала и принимаемого оцифрованного ОС на временном интервале, в котором интерферируют все источники отражения.
Из описания следует, что предлагаемый способ не зависит от продольного взаимного расположения источников отражения в импульсном объеме и изменения их радиальной скорости. Предложенный способ легко реализуем и позволяет восстанавливать дальностные портреты формируемые на основе использования сигналов с перестройкой частоты от импульса к импульсу.
Положительный технический эффект способа заключается в том, что при использовании дальностных портретов, полученных на его основе, можно в среднем на 18% снизить амплитудные искажения отдельных импульсных откликов и на 24% повысить достоверность формируемого дальностного портрета ВО.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Патент РФ №2326402. G01S 13/58. Способ измерения радиальной скорости воздушной цели в режиме перестройки частоты от импульса к импульсу. Савостьянов В.Ю., Майоров Д.А., Прохоркин А.Г., Митрофанов Д.Г. Заявка №2007101537. Опубл. 10.06.2008. БИ №16. Часть Ш. С. 752.
2. Григорин-Рябов В.В. Радиолокационные устройства. - М.: Сов. радио, 1970. - 680 с.
3. Бартон Д.К., Вард Г.Р. Справочник по радиолокационным измерениям. Пер. с англ. / Под ред. Вейсбейна М.М. - М., Сов. радио, 1976. - 392 с.
4. Справочник по радиолокации / Под ред. Сколника М.И. Пер. с англ. - М.: Сов. радио, 1967.
5. Радиоэлектронные системы. Основы построения и теория. Справочник / Под ред. Я.Д. Ширмана, 2007. 512 с.
6. Справочник по основам радиолокационной техники / Под ред. Дружинина В.В. - М.: Воениздат, 1967. - 768 с.
7. Вентцель Е.С. Теория вероятностей. М.: Высш. школа, 2001. - 575 с.
8. Дискретное преобразование Фурье. Учебное пособие / В.П. Кандидов и др. - М., Физический факультет МГУ, 2019. - 88 с.
9. Митрофанов Д.Г. Комплексный адаптивный метод построения радиолокационных изображений в системах управления двойного назначения. Теория и системы управления, 2006. №1. С. 101-118.
10. Митрофанов Д.Г. Формирование двумерного радиолокационного изображения цели с траекторными нестабильностями полета. Радиотехника и электроника. РАН, 2002. №7. С. 852-859.
11. Митрофанов Д.Г. Алгоритмы адаптивного метода построения двумерного радиолокационного изображения // Измерительная техника, 2004. №11 .С. 6-11.
12. Митрофанов Д.Г. Метод построения радиолокационных изображений аэродинамических летательных аппаратов // Полет, 2006. №11. С. 52-60.
13. Майоров Д.А., Митрофанов Д.Г., Севостьянов В.Ю. Измерение радиальной скорости воздушных объектов в режиме перестройки частоты // Измерительная техника. 2008. №2. С. 43-47.
14. Майоров Д.А., Митрофанов Д.Г., Севостьянов В.Ю. Применение зондирующих сигналов с перестройкой частоты для измерения радиальной скорости воздушных объектов методом минимума энтропии // Электромагнитные волны и электронные системы. 2007. №9. С. 54-60.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования дальностного портрета повышенной информативности на основе использования сигналов с перестройкой частоты от импульса к импульсу | 2023 |
|
RU2808449C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ВОЗДУШНОЙ ЦЕЛИ В РЕЖИМЕ ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ ПО СЛУЧАЙНОМУ ЗАКОНУ ПРИ ПОНИЖЕННОМ ОТНОШЕНИИ СИГНАЛ-ШУМ | 2008 |
|
RU2389039C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ ДЛЯ РЕЖИМА ПЕРЕСТРОЙКИ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ | 2014 |
|
RU2541504C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ВОЗДУШНОЙ ЦЕЛИ В РЕЖИМЕ ПЕРЕСТРОЙКИ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ | 2007 |
|
RU2326402C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ВЫЯВЛЕНИЯ ЗАКОНА ИЗМЕНЕНИЯ УГЛОВОЙ СКОРОСТИ ПОВОРОТА СОПРОВОЖДАЕМОГО ВОЗДУШНОГО ОБЪЕКТА ПО ПОСЛЕДОВАТЕЛЬНО ПРИНЯТЫМ ОТРАЖЕНИЯМ СИГНАЛОВ С ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ | 2013 |
|
RU2525829C1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ В РЕЖИМЕ ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ | 2009 |
|
RU2419107C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ВОЗДУШНОГО ОБЪЕКТА В РЕЖИМЕ ХАОТИЧНОЙ ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ ПРИ ОГРАНИЧЕННОМ КОЛИЧЕСТВЕ ИСПОЛЬЗУЕМЫХ ЧАСТОТ | 2010 |
|
RU2427003C2 |
| СПОСОБ ВЫЯВЛЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ МАЛОРАЗМЕРНОГО ВОЗДУШНОГО ОБЪЕКТА В ВИДЕ РАДИАЛЬНОГО УСКОРЕНИЯ ДВИЖЕНИЯ ДЛЯ РЕЖИМА СОПРОВОЖДЕНИЯ С ИСПОЛЬЗОВАНИЕМ СИГНАЛОВ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ | 2009 |
|
RU2392640C1 |
| СПОСОБ ВНЕШНЕГО РАДИОЛОКАЦИОННОГО ВЫЯВЛЕНИЯ ФАКТА НАЛИЧИЯ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА У ВОЗДУШНОГО ОБЪЕКТА ПО СТРУКТУРЕ ЕГО ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКИ | 2014 |
|
RU2562060C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКИ ВОЗДУШНОГО ОБЪЕКТА С ПОВЫШЕННОЙ ИНФОРМАТИВНОСТЬЮ НА УЧАСТКАХ ЕГО ПРОСТРАНСТВЕННО-УГЛОВОГО ЗАМИРАНИЯ | 2015 |
|
RU2603694C1 |

Изобретение относится к методам обработки полученной радиолокационным способом информации и может быть использовано в радиолокационных станциях кругового обзора для распознавания воздушных объектов (ВО) и для формирования дальностного портрета, получаемого на основе использования сигналов с перестройкой частоты за счет построения характеристики изменения радиальной скорости воздушного объекта. Техническим результатом изобретения является создание способа измерения радиальной скорости воздушной цели в режиме перестройки частоты от импульса к импульсу для формирования дальностного портрета, работоспособного в условиях протяженного расположения отдельных источников отражения зондирующего сигнала. В заявленном способе предлагается использовать все возможное множество частотных характеристик ВО, число которых соответствует количеству дискрет принимаемого оцифрованного сигнала. 17 ил.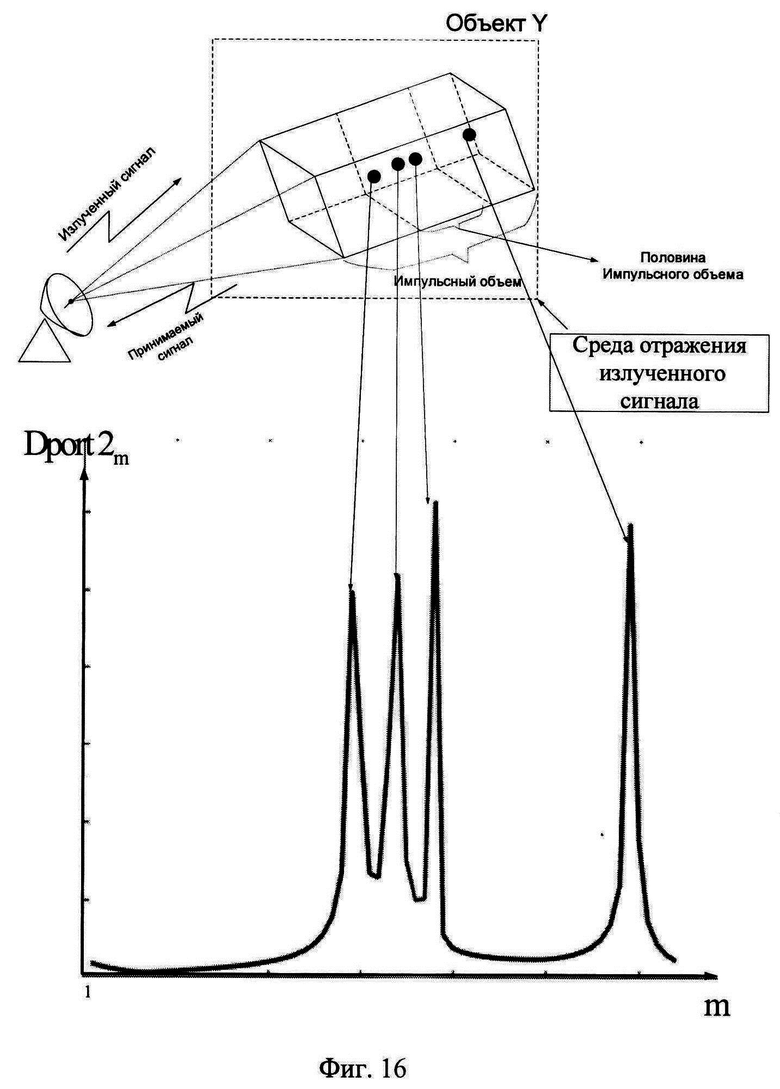
Способ формирования дальностного портрета, получаемого на основе использования сигналов с перестройкой частоты, от импульса к импульсу, за счет построения характеристики изменения радиальной скорости воздушного объекта, заключающийся в том, что с помощью приемо-передатчика радиолокатора излучают в свободное пространство зондирующий сигнал UЗС(t), который представляет собой пачку 2k импульсных сигналов с перестройкой частоты по случайному закону, где k - целое число, принимающее значение от 6 до 8, время Δt на излучение пачки сигналов с перестройкой частоты выбирают не более интервала угловой корреляции Tук поворота воздушного объекта, составляющего величину 5 мс, параллельно в оперативном запоминающем устройстве формируют последовательность величин частот, используемых в пачке сигналов с перестройкой частоты, от f0 до f0+Fnep, где f0 - основная несущая частота зондирующего сигнала сантиметрового диапазона, Fпер - диапазон, в котором осуществляется перестройка частоты от импульса к импульсу с шагом Δf=Fnep/(N-1), где N - число используемых частот, затем номера частот излучения распределяют по случайному закону, при котором время излучения tn от начала пачки для импульса на n-й частоте f0+nΔf, где n - номер используемой частоты,  , определяется по формуле
, определяется по формуле
где Ти - период повторения импульсов внутри пачки,  - порядковый номер излучения импульса на n-й частоте f0+nΔf, принимающий значение от 1 до N, единожды повторяющееся в пределах пачки сигналов с перестройкой частоты, порядок использования частот запоминается, величина Ти выбирается, исходя из требования обеспечения однозначности отсчетов по доплеровской частоте во всем диапазоне возможных радиальных скоростей цели исходя из неравенства
- порядковый номер излучения импульса на n-й частоте f0+nΔf, принимающий значение от 1 до N, единожды повторяющееся в пределах пачки сигналов с перестройкой частоты, порядок использования частот запоминается, величина Ти выбирается, исходя из требования обеспечения однозначности отсчетов по доплеровской частоте во всем диапазоне возможных радиальных скоростей цели исходя из неравенства
Fи>Fд max,
где  - частота повторения импульсов внутри пачки, Fд max=2Vp max(f0+Fпер)/c - максимально возможная доплеровская частота цели, Vp max - максимально возможная радиальная скорость цели, во второй точке пространства, называемого объектом Y, представляющим собой L источников отражения зондирующего сигнала, осуществляется отражение зондирующего сигнала, в результате на входе приемника формируются отраженные сигналы на разных частотах f0+nΔf+Fдn, где Fдn - доплеровская частотная добавка отраженного сигнала на n-й частоте, обусловленная радиальной скоростью воздушного объекта, принимают с помощью радиолокатора отраженные на разных частотах сигналы, понижают частоту принимаемых сигналов до промежуточной fпp, чтобы после перехода с несущей f0 на промежуточную fпp частоту отраженный сигнал на n-й частоте соответствовал зависимости
- частота повторения импульсов внутри пачки, Fд max=2Vp max(f0+Fпер)/c - максимально возможная доплеровская частота цели, Vp max - максимально возможная радиальная скорость цели, во второй точке пространства, называемого объектом Y, представляющим собой L источников отражения зондирующего сигнала, осуществляется отражение зондирующего сигнала, в результате на входе приемника формируются отраженные сигналы на разных частотах f0+nΔf+Fдn, где Fдn - доплеровская частотная добавка отраженного сигнала на n-й частоте, обусловленная радиальной скоростью воздушного объекта, принимают с помощью радиолокатора отраженные на разных частотах сигналы, понижают частоту принимаемых сигналов до промежуточной fпp, чтобы после перехода с несущей f0 на промежуточную fпp частоту отраженный сигнал на n-й частоте соответствовал зависимости
fпр+nΔf+fд n=fпp n+Fдn,
где fпp n=fпp+nΔf, используют для дальнейшего усиления и обработки N частотных каналов, входные фильтры которых обеспечивают проникновение в n-й частотный канал отраженных сигналов только на n-й промежуточной частоте с соответствующей доплеровской добавкой fпp n+Fд n, затем выделяют с помощью квадратурных фазовых детекторов значения квадратурных составляющих принятых сигналов, преобразовывают квадратурные составляющие принятых сигналов в цифровую форму с помощью аналого-цифровых преобразователей с частотой дискретизации Fd не менее Fd=2(fnp+Fдn),
отличающийся тем, что после прохождения n-го частотного канала приемника и аналого-цифрового преобразования принимаемые сигналы записывают в комплексной форме по формуле
где  - амплитуда отраженного на n-й частоте сигнала,
- амплитуда отраженного на n-й частоте сигнала,
 - фаза отраженного на n-й частоте сигнала,
- фаза отраженного на n-й частоте сигнала,
 и
и  - значения квадратурных составляющих принятого сигнала на n-й частоте, после чего формируют двумерный сигнальный массив Kсигn,w, имеющий N строк и N2=Тзадmax⋅Fd столбцов, где Тзадmax - соответствует задержке сигнала, отраженного объектом на максимальной дальности, w=1…N2, последовательно записывают в строки массива Kсигn,w значения принятых оцифрованных сигналов в комплексной форме
- значения квадратурных составляющих принятого сигнала на n-й частоте, после чего формируют двумерный сигнальный массив Kсигn,w, имеющий N строк и N2=Тзадmax⋅Fd столбцов, где Тзадmax - соответствует задержке сигнала, отраженного объектом на максимальной дальности, w=1…N2, последовательно записывают в строки массива Kсигn,w значения принятых оцифрованных сигналов в комплексной форме в порядке, соответствующем линейно-ступенчатому изменению частоты, затем формируют двумерный массив зондирующих сигналов Zn,w2, имеющий N строк и N2 столбцов, причем в элементы каждой n-й строки массива Zn,w2 предварительно записывают оцифрованные зондирующие сигналы в порядке, соответствующем линейно-ступенчатому изменению частоты по формуле
в порядке, соответствующем линейно-ступенчатому изменению частоты, затем формируют двумерный массив зондирующих сигналов Zn,w2, имеющий N строк и N2 столбцов, причем в элементы каждой n-й строки массива Zn,w2 предварительно записывают оцифрованные зондирующие сигналы в порядке, соответствующем линейно-ступенчатому изменению частоты по формуле
где τ - длительность каждого импульса из пачки сигналов с перестройкой частоты, А - амплитуда каждого импульса, ϕ0 - начальная фаза зондирующего сигнала, fпp n=fnp+nΔf, далее проводят корреляционную обработку с элементами массивов Kсигn,w и Zn,w2, по формуле
где  - знак комплексного сопряжения, w3=1…N2, а результат корреляционной обработки записывают в массив
- знак комплексного сопряжения, w3=1…N2, а результат корреляционной обработки записывают в массив , затем последовательно элементы из каждого w3-го столбца массива
, затем последовательно элементы из каждого w3-го столбца массива  записывают в вектор Gkor, состоящий из N элементов, после чего формируют двумерную матрицу Dkor данных из N строк и Z=2Vp max/dV+1 столбцов, где число 2 определяет возможность измерения положительных и отрицательных радиальных скоростей, Vp max - максимально возможная радиальная скорость воздушного объекта, выбираемая заблаговременно, dV - интервал дискретизации радиальной скорости, определяющий точность измерения радиальной скорости, в дальнейшем в элемент n-й строки z-го столбца матрицы Dkor записывают результат последовательного произведения вектора
записывают в вектор Gkor, состоящий из N элементов, после чего формируют двумерную матрицу Dkor данных из N строк и Z=2Vp max/dV+1 столбцов, где число 2 определяет возможность измерения положительных и отрицательных радиальных скоростей, Vp max - максимально возможная радиальная скорость воздушного объекта, выбираемая заблаговременно, dV - интервал дискретизации радиальной скорости, определяющий точность измерения радиальной скорости, в дальнейшем в элемент n-й строки z-го столбца матрицы Dkor записывают результат последовательного произведения вектора  , сформированного для каждого w3-гo столбца массива
, сформированного для каждого w3-гo столбца массива , на возможный диапазон изменения радиальной скорости по формуле
, на возможный диапазон изменения радиальной скорости по формуле

далее путем проведения обратного быстрого преобразования Фурье с комплексными векторами данных каждого столбца матрицы Dkor получают матрицу Dkor1, после чего находят максимальное значение модуля комплексного сигнала в матрице Dkor1 и делят комплексные величины всех элементов матрицы Dkor1 на это значение, а затем рассчитывают величину энтропии данных Нkorz для каждого z-го столбца матрицы Dkor1 по формуле
после чего определяют номер столбца zkormin H, соответствующий наименьшему значению энтропии Hkorz min, с помощью которого находят оценку радиальной скорости воздушного объекта  по формуле
по формуле

и принимают эту оценку в качестве измеренного значения радиальной скорости воздушного объекта в w3-й момент времени, после чего формируют вектор Hirs состоящий из N2 элементов, записывая в его w3-й элемент оценку измеренного значения радиальной скорости воздушного объекта для каждого w3-го столбца массива  , затем используют заблаговременно записанный в память электронно-вычислительной машины двумерный массив Ороrn,w3, состоящий из N строк и N2=Тзадmax⋅Fd столбцов, в каждую строку которого записаны значения оцифрованного с частотой дискретизации Fд опорного сигнала в порядке линейно-ступенчатого изменения частоты согласно формуле
, затем используют заблаговременно записанный в память электронно-вычислительной машины двумерный массив Ороrn,w3, состоящий из N строк и N2=Тзадmax⋅Fd столбцов, в каждую строку которого записаны значения оцифрованного с частотой дискретизации Fд опорного сигнала в порядке линейно-ступенчатого изменения частоты согласно формуле
в дальнейшем проводят поэлементное перемножение элементов массива Korn,w3 с элементами массива Oporn,w3 по формуле
после этого последовательно умножают каждый w3-й член каждого столбца массива Korn,w3 на специальный множитель  , определяемый по формуле
, определяемый по формуле
а результат записывают в сформированный двумерный массив  , после этого для каждого столбца массива Kискn,w3 проводят дискретное обратное преобразование Фурье, а результат преобразования записывают в двумерный массив HKSm,w3, затем формируют дальностный портрет, анализируя модуль каждого n-го члена каждой строки массива HKSm,w3 на предмет наличия максимального значения и записывают его последовательно в вектор Dport2m.
, после этого для каждого столбца массива Kискn,w3 проводят дискретное обратное преобразование Фурье, а результат преобразования записывают в двумерный массив HKSm,w3, затем формируют дальностный портрет, анализируя модуль каждого n-го члена каждой строки массива HKSm,w3 на предмет наличия максимального значения и записывают его последовательно в вектор Dport2m.
| Способ получения двумерного радиолокационного изображения объекта при многочастотном импульсном зондировании и инверсном синтезе апертуры с итерационным уточнением расстояния от эквивалентного фазового центра антенны до точки синтезирования | 2016 |
|
RU2628997C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ВОЗДУШНОЙ ЦЕЛИ В РЕЖИМЕ ПЕРЕСТРОЙКИ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ | 2007 |
|
RU2326402C1 |
| СПОСОБ ПОЛУЧЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА В БОЛЬШОМ ДИАПАЗОНЕ ИЗМЕНЕНИЯ ВЕЛИЧИН ЭФФЕКТИВНЫХ ПЛОЩАДЕЙ РАССЕИВАНИЯ ЛОКАЛЬНЫХ ЦЕНТРОВ ПРИ МНОГОЧАСТОТНОМ ИМПУЛЬСНОМ ЗОНДИРОВАНИИ | 2008 |
|
RU2372627C1 |
| СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПРЯМОЛИНЕЙНО ЛЕТЯЩЕЙ ЦЕЛИ ПРИ МНОГОЧАСТОТНОМ УЗКОПОЛОСНОМ ЗОНДИРОВАНИИ | 1995 |
|
RU2099743C1 |
| Способ построения панорамного радиолокационного изображения объекта | 2016 |
|
RU2629372C1 |
| МИТРОФАНОВ Д.Г | |||
| Алгоритмы адаптивного метода построения двумерного радиолокационного изображения / Измерительная техника: ежемесячный научно-технический журнал | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Сс | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| US 5347283 A, 13.09.1994 | |||
| CN | |||

