Изобретение относится к индивидуальным транспортным средствам и может быть использовано для перемещения людей с ограниченными возможностями.
Известны универсальные электроколяски, способные перемещаться по горизонтальной поверхности и лестницам (универсальные электроколяски «Универсал», «Максимус» Обсервер), содержащие раму с креслом, полноприводные колеса и привод горизонтирования кресла.
Недостатками данных универсальных электроколясок являются высокая стоимость, сложность конструкции, низкая устойчивость, сильное раскачивание при перемещении по ступенькам вверх или вниз и на переходных режимах. Кроме того, база универсальных электроколясок оптимальна только для определенного шага ступеней. Для уменьшения раскачки на универсальные электроколяски устанавливают полноприводные колеса с массивными жесткими шинами с поперечными грунтозацепами и без подвески. Это вызывает тряску универсальных электроколясок даже при езде по ровным дорогам с твердым покрытием. Четыре мощных привода требуют энергоемких аккумуляторов и прочной рамы, в результате вес увеличивается и достигает сотен кг. Дальность пробега уменьшается. В итоге, для перемещения колясок и электроколясок по ступенькам вверх или вниз предпочитают использовать мобильные гусеничные подъемники, либо устанавливают специальные подъемники или лифты возле каждой лестницы. Каждая единица такой техники требует обслуживания и на порядок дороже средней электроколяски.
Известно самоходное инвалидное кресло-коляска, содержащее кресло, источник питания, механизм передвижения (Патент РФ №2033779, A61G 5/06, оп. 30.04.1995 г.).
Недостатком самоходного инвалидного кресла-коляски является громоздкость конструкции, неустойчивость и раскачивание конструкции при подъеме и спуске по лестничным маршам.
Известно транспортное средство, содержащее раму с креслом, механизм передвижения, жестко закрепленный на раме (Патент РФ №2410071, A61G 5/06, оп. 27.01.2011 г. - прототип).
Недостатками вышеуказанного транспортного средства является сложность и громоздкость трансформируемой конструкции. Консоли с крестообразными опорами увеличивают габариты кресла-коляски, что ограничивает ее применение на лестничных площадках с ограниченными размерами. При этом передняя консоль имеет недостаточный вылет от центра тяжести коляски. База и размеры крестообразных опор рассчитаны на определенный шаг ступеней и угол наклона лестницы, которые могут меняться. Движение на крестообразных опорах вызывает раскачивание кресла-коляски, особенно на переходных режимах.
Предлагаемое техническое решение устраняет вышеперечисленные недостатки: обеспечивает устойчивость и надежность индивидуального транспортного средства при переходных режимах, при прохождении по лестничным маршам, эскалаторам без изменения горизонтальности сиденья, при преодолении различных препятствий, бордюров, в том числе ступеней и въезд в общественный транспорт, а также сокращает габариты устройства.
Поставленная цель достигается тем, что индивидуальное транспортное средство содержит раму с креслом, источник питания, механизм управления и источник питания, механизм передвижения, включающий переднее и заднее опорные устройства, при этом переднее опорное устройство включает две параллельно расположенные гусеничные ленты или цепи, имеющие форму многоугольника с тупым углом в нижней части с жестко закрепленными на раме формообразующими элементами в виде опорного, ведущего и натяжного элементов, опорных направляющих, и два привода, каждый из которых жестко закреплен на раме и соединен с ведущим элементом, а заднее опорное устройство включает привод, горизонтально ориентированный вал с опорами, механизм фиксации, стойки с вилками, в которых установлены с возможностью поворота вокруг горизонтального вала и вращения вокруг собственной оси самоориентирующиеся колеса, при этом заднее опорное устройство закреплено на раме посредством опор, на которых закреплен горизонтально ориентированный вал с возможностью вращения вокруг собственной оси и жестко закреплен механизм фиксации,
оно дополнительно снабжено механизмом изменения положения кресла в виде электроприводного механизма или ручного механизма, механизм управления дополнительно снабжен электронным микропроцессором, кресло дополнительно снабжено датчиком горизонтальности, расположенным на стойке, заднее опорное устройство дополнительно снабжено инфракрасными, емкостными или ультразвуковыми датчиками, расположенными в передней и задней частях рамы, опорным элементом, жестко закрепленным на стойке, переднее опорное устройство дополнительно снабжено поддерживающими направляющими в виде прямолинейных жестких пластин, жестко закрепленных на раме и расположенных в верхней части многоугольника между ведущим и натяжным элементами, механизмом натяжения, установленным на оси натяжного элемента и закрепленным на раме.
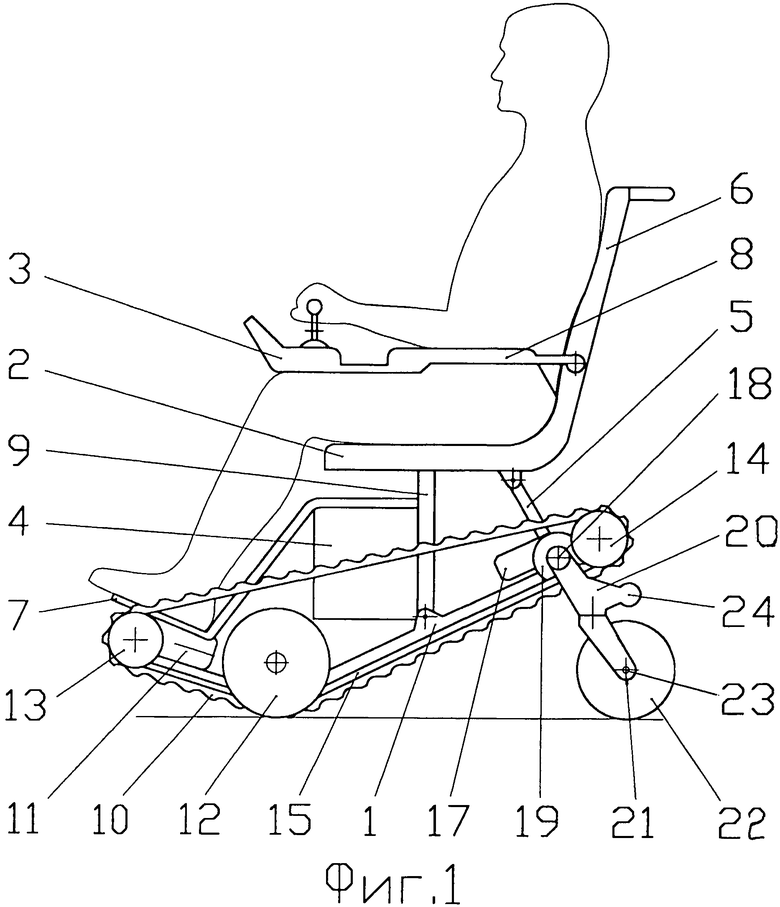
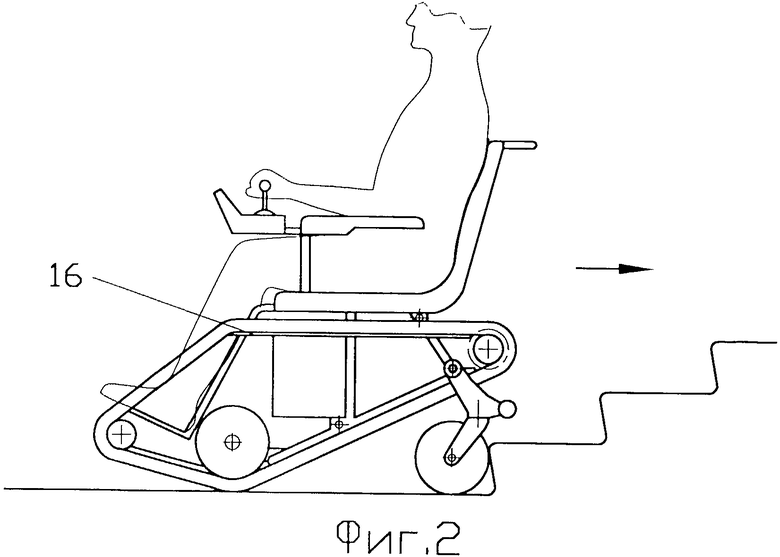
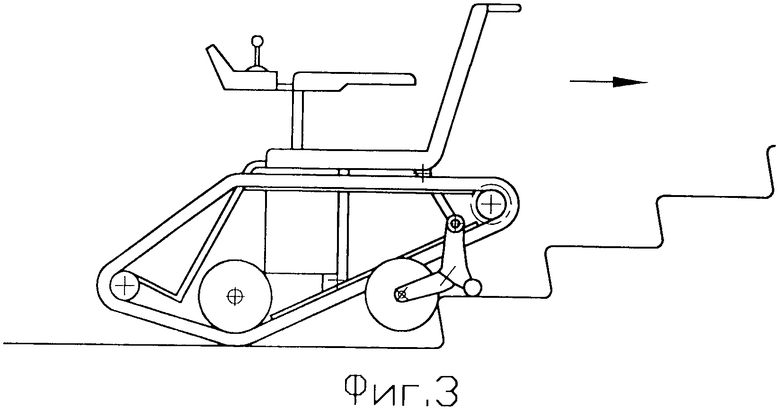
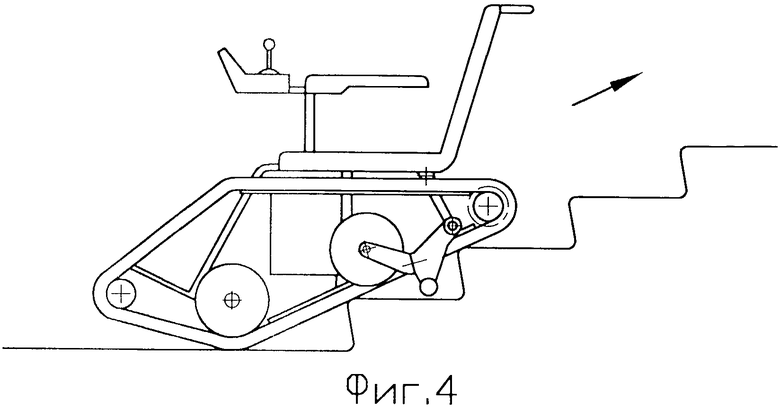
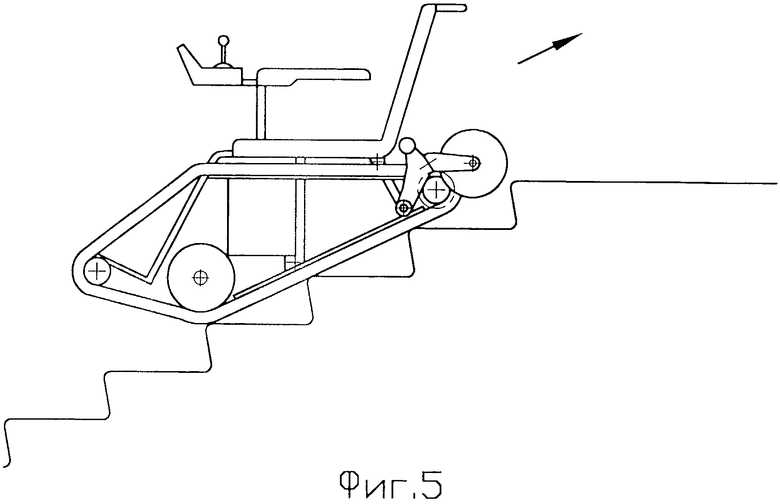
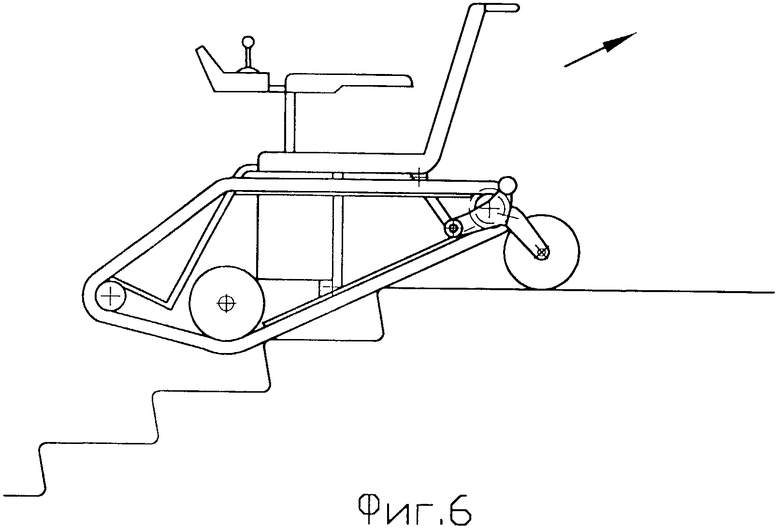
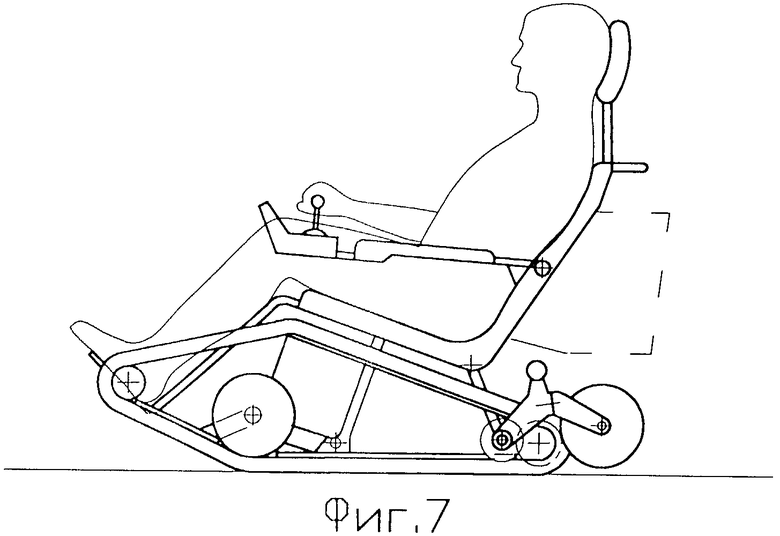
На фиг.1. изображен вид сбоку индивидуального транспортного средства на горизонтальной поверхности на переднем и заднем опорных устройствах; на фиг.2, 3, 4 изображен вид сбоку индивидуального транспортного средства в переходный режим, когда осуществляют подготовку к подъему; на фиг 5 изображен вид сбоку индивидуального транспортного средства при подъеме; на фиг.6 изображен вид сбоку индивидуального транспортного средства в переходный режим, когда осуществляют подготовку от подъема к переходу на горизонтальную поверхность; на фиг.7 изображен вид сбоку индивидуального транспортного средства на горизонтальной поверхности при движении на переднем опорном устройстве.
Индивидуальное транспортное средство (далее по тексту - ИТС) содержит раму 1 с креслом 2, механизм передвижения, механизм управления 3, источник питания 4 и механизм изменения положения кресла 5.
Кресло 2 закреплено на раме 1 и выполнено со спинкой 6, подножками 7, подлокотниками 8 и стойкой 9, при этом стойка 9 шарнирно закреплена на раме 1.
Механизм передвижения содержит переднее и заднее опорные устройства, которые обеспечивают устойчивость при перемещении по горизонтали, ступенькам, вверх или вниз и на переходных режимах практически без раскачки ИТС.
Переднее опорное устройство включает две параллельно расположенные гусеничные ленты или цепи 10 и два привода 11.
Каждая гусеничная лента или цепь 10 имеет обвод в форме многоугольника, например треугольника, с тупым углом в нижней части и с приподнятой передней и задней частями, с жестко закрепленными на раме 1 формообразующими элементами в виде опорного 12, ведущего 13 и натяжного 14 элементов, опорных направляющих 15.
Формообразующие элементы 12, 13, 14, 15 взаимодействуют с гусеничной лентой или цепью 10, например, по принципу зубчатой или клиноременной передачи, и с приводом 11, обеспечивая ее перемещение.
Приподнятая передняя часть переднего опорного устройства обеспечивает преодоление препятствий вроде бордюрного камня, при движении ИТС по обочине дорог, газонам, аллеям, пересеченной местности, булыжнику, гравию, песку, гальке при движении вперед ИТС с задействованием переднего и заднего опорных устройств, а зимой на плотном снегу и в гололед задействуют только переднее опорное устройство.
Опорный элемент 12 представляет собой одно или несколько элеметов, например колесо, шкив, звездочку, каток и т.п., расположен в нижнем тупом углу многоугольника обвода и установлен на оси, которая закреплена на раме 1. Опорный элемент 12 дополнительно снабжен пружинной подвеской, закрепленной на раме 1. Опорный элемент 12 обеспечивает ИТС сопротивление качения опорных колес 12 по твердой поверхности аналогично сопротивлению качения колесного хода.
Ведущий элемент 13 представляет собой, например, шкив или звездочку, расположен в передней части обвода гусеницы и установлен на выходном валу привода 11 в виде, например, моторедуктора, закрепленного на раме 1.
Натяжной элемент 14 представляет собой, например колесо, шкив, звездочку, и расположен в задней части обвода.
Опорные направляющие 15 представляют собой прямолинейный жесткий элемент, например прямолинейную жесткую пластину, дополнительно снабженную в нижней части материалом с низким коэффициентом трения, например фторопластом, обеспечивающим дополнительное скольжение опорных направляющих 15 по гусеничной ленте или цепи 10. Опорные направляющие 15 расположены под заданными углами по обе стороны от опорного элемента 12 и жестко закреплены на раме 1.
Гусеничная лента 10 представляет собой бесшарнирную гусеницу, например резинотканевую ленту, кордошнуровую ленту.
Гусеничная цепь 10 представляет собой, например, роликовую цепь.
Гусеничная лента или цепь 10 дополнительно снабжена резиновыми или полиуретановыми грунтозацепами, которые расположены на наружной поверхности гусеничной ленты 10, обеспечивая надежное зацепление с поверхностью, например, грунта.
При движении на колесном ходу грунтозацепы гусеничных лент 10 касаются поверхности дороги рядом с пятном контакта опорных элементов 12, передние и задние формообразующие элементы гусеничных лент 10 приподняты над дорогой, что обеспечивает повышенную проходимость.
Приводы 11 жестко закреплены на раме 1 и представляют собой, например, моторедуктор, электродвигатель (ЭД) с двухступенчатым редуктором, тормозом и т.д. Каждый привод 11 соединен с ведущим элементом 13, приводя в движение гусеничную ленту или цепь 10 и соответственно опорный 12 и натяжной 14 элементы.
Переднее опорное устройство дополнительно снабжено механизмом натяжения, установленным на оси натяжного элемента 14 и закрепленным на раме 1. Механизм натяжения представляет собой, например, пружину или винт (не показано).
Переднее опорное устройство дополнительно снабжено поддерживающими направляющими 16 (фиг.2), которые закреплены на раме 1 и расположены между ведущим 13 и натяжным 14 элементами. Поддерживающее направляющее 16 представляет собой прямолинейный, жесткий, удлиненный элемент, например прямолинейную жесткую, удлиненную пластину.
Поддерживающие направляющие 16 служат для подъема верхних ветвей гусеничной ленты или цепи к уровню кресла 2 для возможности ручного вращения опорного элемента 12 посредством гусеничной ленты или цепи 10.
Заднее опорное устройство закреплено на раме 1 и содержит привод 17, горизонтально ориентированный вал 18, на опорах которого установлены кулачки механизма фиксации 19, стойки 20 с вилками 21, в которых расположены самоориентирующиеся колеса 22. Самоориентирующиеся колеса 22 установлены с возможностью поворота вокруг оси горизонтально ориентированного вала 18 и вращения вокруг собственной оси 23.
При этом кулачковые механизмы фиксации 19 установлены с возможностью фиксации вилок 21 относительно стоек 20. Механизм фиксации 19 представляет собой, например, кулачковый механизм, установлен с возможностью фиксации вилки 21 самоориентирующегося колеса 22, что обеспечивает его фиксацию в заданном положении.
Возможность поворота самоориентирующихся колес 22 вокруг оси горизонтально ориентированного вала 18 назад вверх или вперед вверх позволяет изменять расстояние между осями опорных элементов 12 и самоориентирующихся колес 22 и между осями опорных элементов 12 и натяжных элементов 14, что обеспечивает проходимость, продольную, поперечную, курсовую устойчивость, возможность наклонить кресло 2 в «полулежачее» положение (фиг.7), то есть снизить центр тяжести и лобовое сопротивление, например при встречном ветре, а также удлинять опорную поверхность гусеничной ленты или цепи 10 для увеличения проходимости по мягкому грунту, например по снегу.
Привод 17 представляет собой, например, электродвигатель (ЭД) с двухступенчатым червячным редуктором, тормозом, и приводит во вращение заднее опорное устройство.
Привод 17 поворачивает самоориентирующиеся колеса 22 вокруг горизонтально ориентированного вала 18 вместе со стойками 20 и вилками 21, например, поднятие самоориентирующихся колес 22 назад вверх или вперед вверх по ходу движения ИТС при подъеме или спуске по лестничным маршам ИТС.
Заднее опорное устройство дополнительно снабжено опорным элементом 24, например, в виде роликовой опоры, жестко закрепленным на стойке 20 или вилке 21, и посредством которого обеспечивают надежный переход с ровной поверхности на лестничный марш без раскачивания ИТС, инфракрасными, емкостными или ультразвуковыми датчиками, расположенными в передней и задней частях рамы 1, датчиком горизонтальности, расположенным на стойке 9, посредством которого осуществляют синхронизированное движение гусениц с поворотом - подъемом стоек 20 при переходных режимах.
Механизм управления 3 дополнительно снабжен электронным микропроцессором для оптимизации переходных режимов и разворотов ИТС.
Механизм управления 3 содержит пульт с многофункциональным рычагом, индикаторами и кнопками, установленный на кресле 2, например, перед правым или левым подлокотником, что позволяет управлять одной рукой, например на кухне. Механизм управления 3 электрически соединен с приводами 11 и 17 механизма передвижения и управляет движением ИТС, например, посредством приводов 11 осуществляют перемещение ТС вперед; посредством приводов 11, дифференцированно изменяя скорость левой и правой гусениц 10, осуществляют перемещение ИТС влево или вправо; посредством реверса ЭД привода 11 осуществляют перемещение ИТС назад; посредством тормоза привода 11 осуществляют остановку ИТС; посредством ЭД привода 17 осуществляют поворот горизонтально ориентированного вала 18 и, соответственно, поворот самоориентирующихся колес 22 вокруг оси горизонтально ориентированного вала 18 назад - вверх или вперед - вверх, что позволяет осуществить переход на подъем или спуск ИТС по лестничным маршам или движение ИТС, например, по пересеченной местности, булыжнику, гравию, песку, гальке, то есть, убрав заднее опорное устройство, перемещение осуществляется посредством передних опорных устройств.
Механизм управления 3 обеспечивает синхронизированное движение переднего и заднего опорных устройств посредством синхронизированного движения ведущего элемента 13 и поворота горизонтально ориентированного вала 18 с самоориентирующимися колесами 22, что позволяет плавно заходить на лестницу и сходить с лестницы в переходные режимы.
Источник питания 4 представляет собой, например, электрический источник питания в виде аккумуляторной батареи, расположенной на раме 1 под креслом 2, а также дизельный источник питания, гибридный источник питания.
Индивидуальное транспортное средство дополнительно снабжено механизмом изменения положения кресла 5 и центра тяжести ИТС относительно базы.
Механизм изменения положения кресла 5 представляет собой электроприводной механизм или ручной механизм закрепленного на стойке 9 кресла 2 и соединенного с рамой 1, например, посредством тяги (на фиг. не показано).
Механизм изменения положения кресла 5 представляет собой ручной механизм изменения положения кресла либо электроприводной механизм изменения положения кресла, например, с рычагом регулирования, с датчиком горизонтального положения кресла для обеспечения горизонтального положения кресла либо с заданным наклоном положения кресла 2 относительно горизонтальной поверхности при подъеме или спуске ИТС по лестнице, эскалатору, пандусу и т.п.
Рычаг либо штурвал ручного механизма изменения положения кресла 5 расположен под подлокотником 8 на стойке 9.
Для корректировки положения центра тяжести ИТС возможно перемещение кресла 2 относительно переднего опорного устройства за счет наклона стойки 9, что позволяет повысить устойчивость ИТС при движении вверх или вниз по лестницам, в том числе и по крутым лестницам, и оптимизировать распределение нагрузки по осям опорных элементов 12 и 22 переднего и заднего опорных устройств или вдоль гусеничных лент или цепей 10 при движении по горизонтальной поверхности.
Индивидуальное транспортное средство дополнительно снабжено съемным багажником или корзиной, расположенной спереди.
Индивидуальное транспортное средство работает следующим образом.
Включают ЭД приводов 11 посредством механизма управления, которые приводят в движение ведущие элементы 13, соответственно гусеничные ленты или цепи 10 и опорные элементы 12. Самоориентирующиеся колеса 22, вращаются вокруг собственной оси 23 совместно с гусеничными лентами или цепями 10, что позволяет перемещать ИТС по твердой ровной поверхности вперед или назад (фиг.1).
При движении вперед по горизонтальной поверхности с препятствиями, например, в виде бордюра высотой до 26 см, приподнятые передние части переднего опорного устройства обеспечивают проходимость через них и защищают ноги пользователя ИТС.
При движении назад по горизонтальной поверхности с препятствиями, например, в виде пола автобуса высотой до 36 см, приподнятые задние части переднего опорного устройства обеспечивают подъем, например, в автобус. Для сравнения, известные электроколяски преодолевают ступеньку высотой не более 5 см.
Например, в режиме движения по горизонтали датчик горизонтальности переключают на автоматическое управление электромеханизмом изменения положения кресла 5.
При движении ИТС по лестничным маршам вверх или вниз включают приводы 11, а привод 17 включают в переходные режимы, когда необходимо убрать или выпустить самоориентирующиеся колеса 22.
Подъем по лестнице осуществляют задним ходом ИТС (фиг.5), предварительно посредством привода 17 поворачивают горизонтально ориентированный вал 18, при этом самоориентирующиеся колеса 22 вместе со стойками 20 и вилками 21 поворачивают вперед, затем поднимают вверх до заданного положения и фиксируют механизмом фиксации 19 в заданном положении. Затем посредством приводов 11 приводят в движение ведущие элементы 13 и, соответственно, гусеничные ленты или цепи 10 с опорными элементами 12, дополнительно посредством механизма изменения положения кресла 5 кресло 2 приводят в заданное положение и осуществляют движение по ребрам ступенек вверх, зацепляясь за них. При этом гусеничные ленты или цепи 10, опираясь на опорные направляющие 15, обеспечивают ИТС плавное и устойчивое перемещение без раскачивания по ступенькам.
На последней ступеньке посредством привода 17 поворачивают горизонтально ориентированный вал 18, который постепенно опускает вниз самоориентирующиеся колеса 22 на горизонтальную площадку. Затем, опираясь опорными элементами 12 и самоориентирующимися колесами 22 на поверхность лестничной площадки, ИТС осуществляет горизонтальное перемещение до контакта самоориентирующихся колес 22 со ступенькой следующей лестницы. Далее процесс повторяют.
После подъема на нужный этаж посредством механизма изменения положения кресла 5 приводят кресло 2 в исходное положение.
Спуск по лестнице осуществляют в обратном порядке движением ИТС передним ходом. Для этого, в момент начала съезда опорных элементов 12, пультом 3 включают привод 17, который поворачивает горизонтально ориентированный вал 18 и, соответственно поворачивает самоориентирующиеся колеса 22 назад, а затем поднимает вверх до заданного положения, при этом срабатывает механизм фиксации 19, исключая поворот вилок 21 самоориентирующихся колес 22. Одновременно с этим посредством приводов 11 гусеничные ленты или цепи 10 двигаются по ребрам ступенек, зацепляясь за них грунтозацепами, и осуществляют движение ИТС вниз по лестнице.
Переход с горизонтального движения ИТС на наклонное движение, а именно спуска или подъема, осуществляют посредством синхронного движения гусеничных лент или цепей 10 с поворотом горизонтально ориентированного вала 18 и соответственно поворотом самоориентирующихся колес 22, что обеспечивает плавный заход и сход ИТС с лестницы.
Индивидуальное транспортное средство обеспечивает устойчивость, надежность при перемещении по лестничным маршам вверх или вниз и на переходных режимах - движение вверх или вниз по лестницам без изменения горизонтальности сиденья, высокую проходимость через пороговые препятствия, по крутым лестницам и пандусам, предназначенным для детских колясок, самостоятельный подъем в общественный транспорт, преодоление бордюров, отдельных ступенек и других препятствий.
Индивидуальное транспортное средство найдет применение в повседневной жизни в качестве уличного, дорожного средства передвижения, перемещения по лестничным маршам, а также в зданиях и в комнатной обстановке. Для индивидуального транспортного средства не нужно парковочное место и специальный бокс для хранения вследствие уменьшения габаритов в сложенном состоянии, в том числе в вертикальном положении, так как заявленная конструкция легко складывается.
Благодаря вышеуказанным характеристикам возможно использование ИТС не только инвалидами, но и, например, пожилыми людьми, и, например, в пешеходных зонах, зданиях, супер-гипермаркетах, где километры полок для «шопинга» и т.п. В этом случае ИТС заменит тележку для покупок, возможно использование впереди съемного багажника-корзину, сканер штрихкода, а откидная подножка или велосипедное сиденье сзади позволяет перевозить пассажира. Причем ИТС будет занимать меньше места, чем человек с магазинной тележкой. Для молодых людей ИТС может иметь мускульный (педальный и ручной) привод, - заменить веломобили и велосипеды. Таким образом, кроме основного назначения ИТС может быть прототипом нового массового средства индивидуальной мобильности.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| ТРАНСФОРМИРУЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2217119C1 |
| Модуль колёсно-гусеничного движителя и шасси с двумя модулями | 2022 |
|
RU2784225C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ КРЕСЛО-КОЛЯСКА | 2015 |
|
RU2611875C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2008 |
|
RU2368366C1 |
| САМОХОДНОЕ КРЕСЛО ДЛЯ ИНВАЛИДОВ | 1991 |
|
RU2033125C1 |
| Устройство для подъёма кресла-коляски с ручным приводом по лестницам | 2023 |
|
RU2823397C1 |
| ИНВАЛИДНАЯ ШАГАЮЩАЯ КРЕСЛО-КОЛЯСКА | 2010 |
|
RU2434622C1 |
| Гусеничный транспортер | 2023 |
|
RU2798887C1 |
| АВТОМАТИЧЕСКИЙ ТОРМОЗ ТРАНСПОРТНОГО СРЕДСТВА ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ И НА ЭСКАЛАТОРАХ | 2012 |
|
RU2510347C2 |
Средство содержит раму с креслом, механизм передвижения, механизм управления и источник питания. Механизм передвижения содержит переднее и заднее опорные устройства. Переднее опорное устройство включает две параллельно расположенные гусеничные ленты или цепи, имеющие форму многоугольника с тупым углом в нижней части с жестко закрепленными на раме формообразующими элементами в виде опорного, ведущего и натяжного элементов, опорных направляющих, и два привода. Каждый привод жестко закреплен на раме и соединен с ведущим элементом, а заднее опорное устройство включает привод, горизонтально ориентированный вал с опорами, механизм фиксации, стойки с вилками, в которых установлены с возможностью поворота вокруг горизонтального вала и вращения вокруг собственной оси самоориентирующиеся колеса. Заднее опорное устройство закреплено на раме посредством опор, на которых закреплен горизонтально ориентированный вал с возможностью вращения вокруг собственной оси и жестко закреплен механизм фиксации. Обеспечивается устойчивость и надежность индивидуального транспортного средства. 7 з.п. ф-лы, 7 ил.
1. Индивидуальное транспортное средство, содержащее раму с креслом, механизм передвижения, механизм управления и источник питания, отличающееся тем, что механизм передвижения содержит переднее и заднее опорные устройства, при этом переднее опорное устройство включает две параллельно расположенные гусеничные ленты или цепи, имеющие форму многоугольника с тупым углом в нижней части с жестко закрепленными на раме формообразующими элементами в виде опорного, ведущего и натяжного элементов, опорных направляющих, и два привода, каждый из которых жестко закреплен на раме и соединен с ведущим элементом, а заднее опорное устройство включает привод, горизонтально ориентированный вал с опорами, механизм фиксации, стойки с вилками, в которых установлены с возможностью поворота вокруг горизонтального вала и вращения вокруг собственной оси самоориентирующиеся колеса, при этом заднее опорное устройство закреплено на раме посредством опор, на которых закреплен горизонтально ориентированный вал с возможностью вращения вокруг собственной оси, и жестко закреплен механизм фиксации.
2. Индивидуальное транспортное средство по п.1, отличающееся тем, что оно дополнительно снабжено механизмом изменения положения кресла в виде электроприводного механизма или ручного механизма.
3. Индивидуальное транспортное средство по п.1, отличающееся тем, что механизм передвижения дополнительно снабжен электронным микропроцессором.
4. Индивидуальное транспортное средство по п.1, отличающееся тем, что кресло дополнительно снабжено датчиком горизонтальности, расположенным на стойке.
5. Индивидуальное транспортное средство по п.1, отличающееся тем, что заднее опорное устройство дополнительно снабжено инфракрасными, емкостными или ультразвуковыми датчиками, расположенными в передней и задней частях рамы.
6. Индивидуальное транспортное средство по п.1, отличающееся тем, что заднее опорное устройство дополнительно снабжено опорным элементом, жестко закрепленным на стойке.
7. Индивидуальное транспортное средство по п.1, отличающееся тем, что переднее опорное устройство дополнительно снабжено поддерживающими направляющими в виде прямолинейных жестких пластин, жестко закрепленных на раме и расположенных в верхней части многоугольника между ведущим и натяжным элементами.
8. Индивидуальное транспортное средство по п.1, отличающееся тем, что переднее опорное устройство дополнительно снабжено механизмом натяжения, установленным на оси натяжного элемента и закрепленным на раме.
| ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2410071C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПОДЪЕМА ПО ЛЕСТНИЦАМ, ПРИВОДИМОЕ В ДЕЙСТВИЕ МОТОРОМ | 1998 |
|
RU2201367C2 |
| Инвалидная коляска | 1988 |
|
SU1680165A1 |
| JP 2000264220 A, 26.09.2000 | |||
| JP 2000135244 A, 16.05.2000. | |||

