Изобретение относится к устройствам преобразования вращательного движения в поступательное и на этой основе к устройствам, движителям, перемещения как в стационарных условиях по твердой поверхности, так и в нестационарных, в подводной, надводной и воздушных средах и безвоздушном пространстве.
Способ преобразования вращательного движения в поступательное широко применяется в различных механизмах, например, общеизвестно, что в токарном станке суппорт перемещается поступательно от винтового вращения вала /1/, в кривошипно-кулисном механизме также вращающийся от двигателя при помощи привода кривошип передает кулисе возвратно-поступательное движение. Известные способы преобразования вращательного движения в поступательное имеют общий недостаток, так как применяется в основном в стационарных условиях, в нестационарных условиях их применение ограничено /2/.
Существуют также устройства /3/, в которых ротор вращает присоединенные к нему грузы по кривой, отличающейся от окружности, например по эллиптической, и эксцентриситет оси вращения вызывает неравенство центробежных сил, действующих на ось вращения, и если устройство находится в свободном состоянии относительно плоскости вращения ротора с грузами, то результирующая разностная сила вызывает поступательное перемещения устройства в сторону большого радиуса от центра вращения, патент Франции №2.059.822.
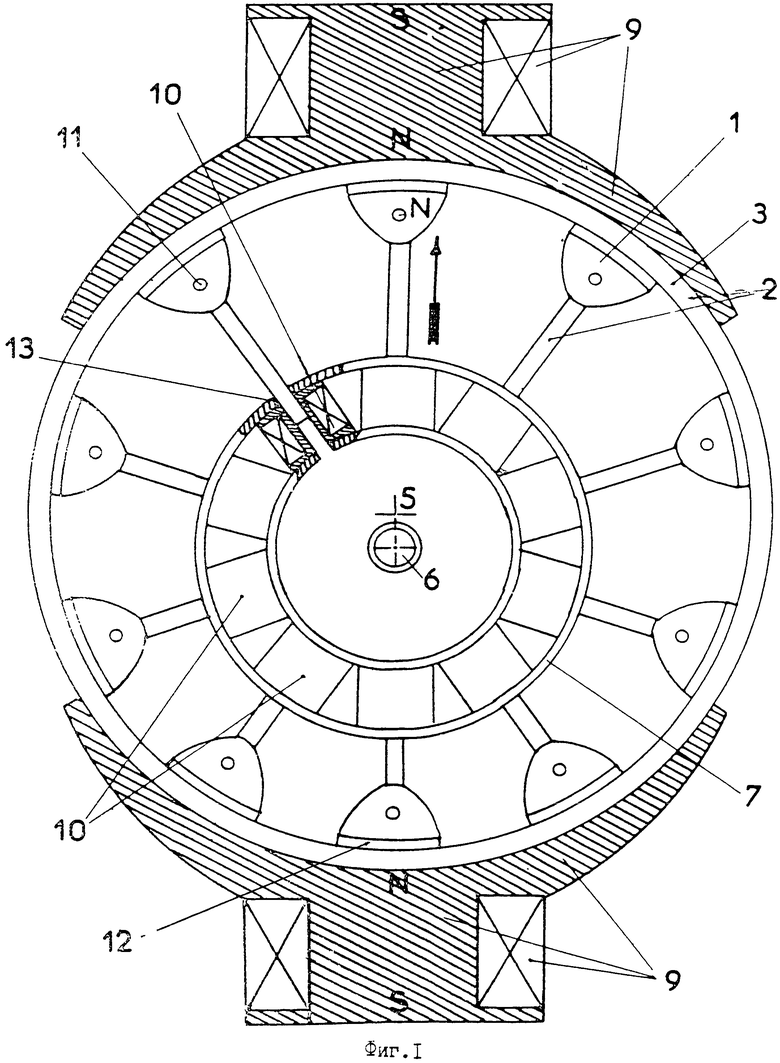
Известное устройство, фиг.1, является одним из устройств по преобразованию вращательного движения в поступательное. Работа устройства, исходя из описания, осуществляется следующим образом. Имеется круглый ротор 7, приводимый во вращательное движение через вал 6 электродвигателем. По окружности ротора 7 расположены на тягах 2 грузы I, которые в радиальном направлении в направляющих 13 имеют свободный ход и при вращении ротора за ось (вал) 6 грузы I за счет центроежных сил расходятся (выдвигаются) из ротора 7. Ротор 7 помещен в цилиндрическое диамагнитное эксцентрическое кольцо 3. Для избежания трения грузов I о внутренние стенки цилиндра 3 подвеска ротора с грузами в цилиндре 3 осуществлена при помощи системы электромагнитов, часть которых 9 находится на корпусе, часть 10 - на роторе, и при взаимодействии электромагнитных полей ротора и корпуса, которые направлены встречно. Подвеска ротора осуществлена так, что не позволяет грузам I касаться стенок цилиндра, то есть корпуса. При раскручивании ротора вокруг оси (за ось) 6 возникающие центробежные силы выдвигают грузы I из направляющих 13. За счет эксцентриситета цилиндрического кольца ось вращения (мнимая) 6 не совпадает с осью 6 вращения ротора 7. Вращение грузов I происходит по траектории, отличающейся от окружности. В данном устройстве эта траектория эллипса или близкая к нему по форме. По этой причине тяги 2, на которых закреплены грузы I, на диаметрально противоположных концах большой оси эллипса имеют разную длину, при вращении постоянно выдвигаются и вдвигаются в сторону эксцентриситета, возникают разные центробежные силы инерции на диаметрально противоположных участках ротора. Их разностная сила, направленная от оси вращения 6 к центру цилиндрического кольца 5, при вращении действует постоянно и перемещает все устройство вместе с двигателем в заданном направлении в плоскости вращения, поскольку цилиндр 3 и его центр 5 могут поворачиваться вокруг оси 6. Известное устройство электромеханическое и поэтому имеет взаимодействие механических деталей (элементов) друг с другом, например выдвижение грузов I на направляющих 13, и обратное в движение при помощи электромагнитов 10, что требует источник постоянного тока, вращение ротора 7 за ось 6 производится электродвигателем, для него также требуется источник электроэнергии. Рабочая схема получается громоздкой, кроме того, КПД такого устройства не может быть большим из-зa потерь на трение при выдвижении и вдвижении грузов I, и в конечном итоге такой преобразователь в качестве движителя для нестационарных условий практически неприменим.
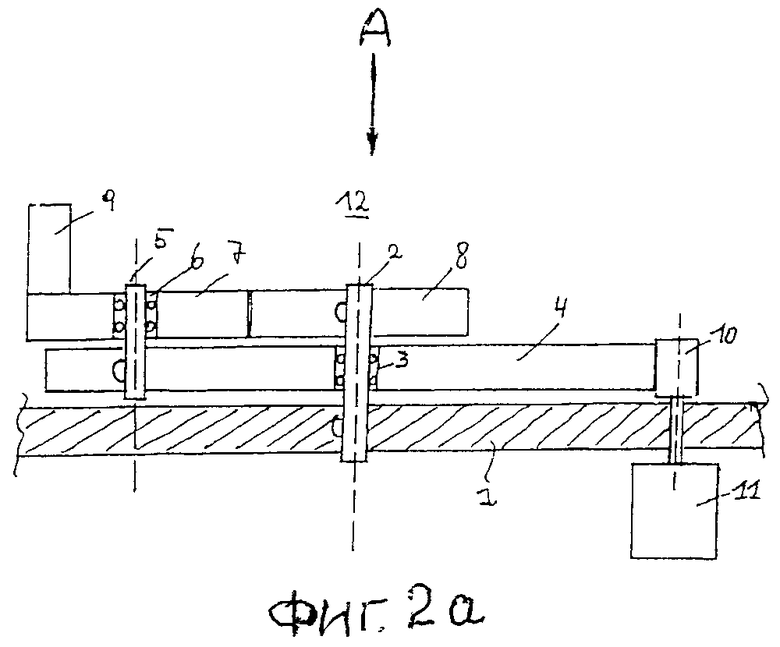
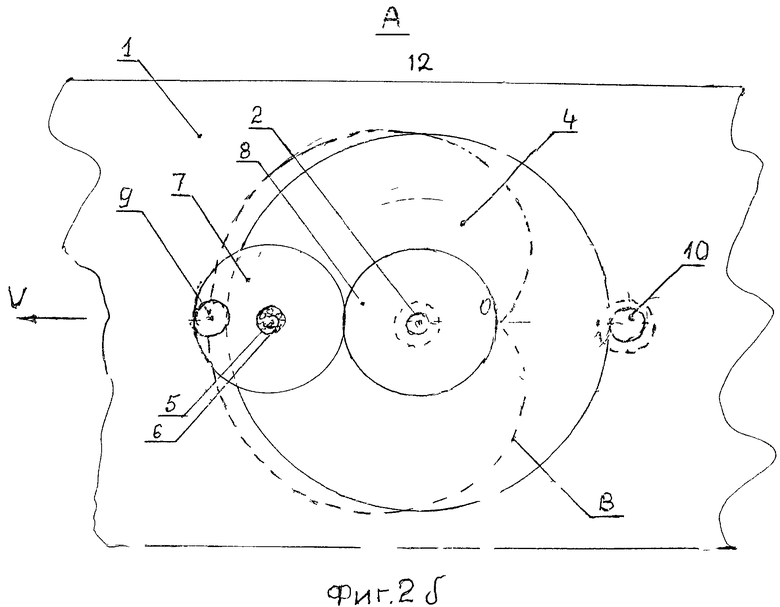
В качестве прототипа предлагаемого устройства изобретения выбрано устройство по патенту DE 19909766 A1. Устройство, фиг.2, 3 представляет механизм, обладающий признаками как планетарной, так и дифференциальной передачи. Передаточный механизм устанавливается на плате I, которая входит в общий привод 12, на плате I также устанавливается электродвигатель 10, который через привод II приводит в действие устройство. Эксцентрический приводной механизм состоит из 3 зубчатых шестерен, соединенных между собой определенным образом.
С электродвигателя 10 посредством привода II вращательная энергия передается на главное зубчатое колесо 4, которое укреплено через подшипник 3 на оси 2. Ось 2 укреплена на плате I, на некотором расстоянии от центра оси 4, примерно на 
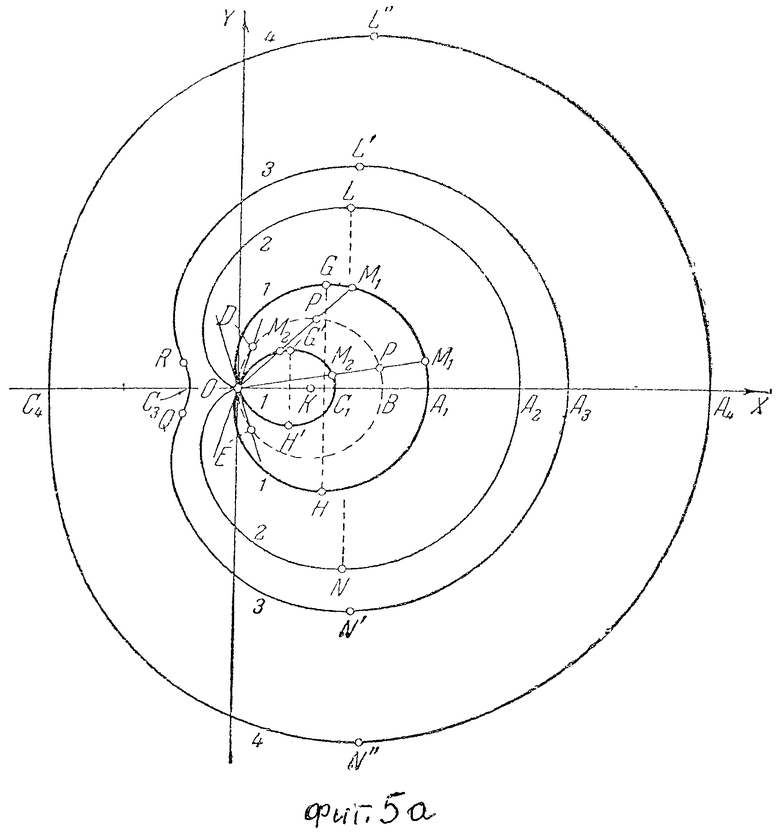
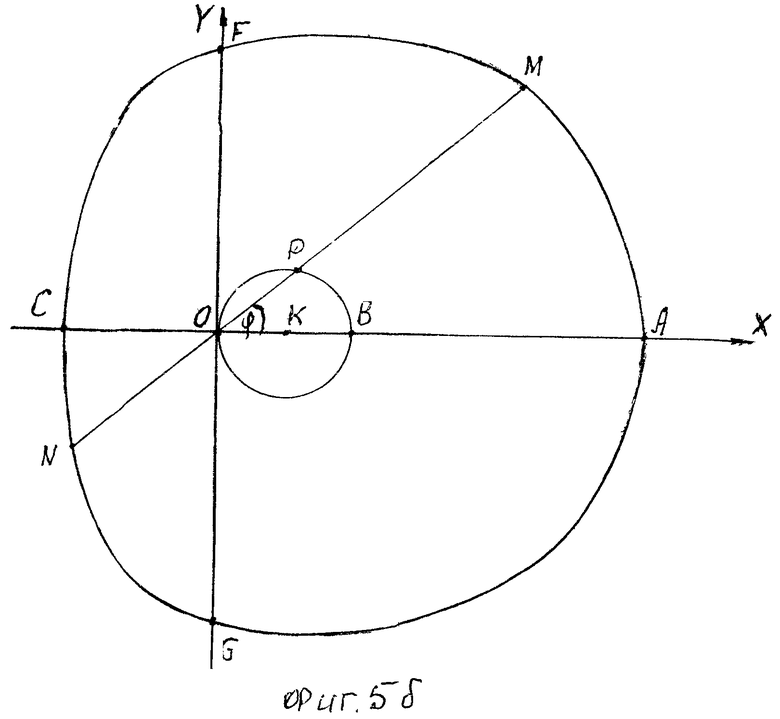
Целью изобретения является создание на основе способа преобразования вращательного движения в поступательное простого и надежного устройства, c учетом устранения перечисленных недостатков, пригодного для перемещения (передвижения) в нестационарных условиях: подводных, надводных, воздушных средах и безвоздушном пространстве с преодалением сил гравитации. Предлагаемое изобретение механическое, преобразование вращательного движения в поступательное и вращение грузов происходит по кривой, навиваемой "улиткой Паскаля", в честь французского ученого Этьена Паскаля (1588-1651), и которая является одним из видов обобщенной конхоиды Никодима (251-150 гг. до н.е.) /5/. Кривая "улитка Паскаля" представляет уравнение 

















Список чертежей, на которые даны ссылки в описании.
Фиг.1. Общий вид эксцентрического устройства по патенту Франции 2059822.
Фиг.2а, 2б. Общий вид прототипа эксцентрического устройства перемещения по патенту DE 19909766 А1.
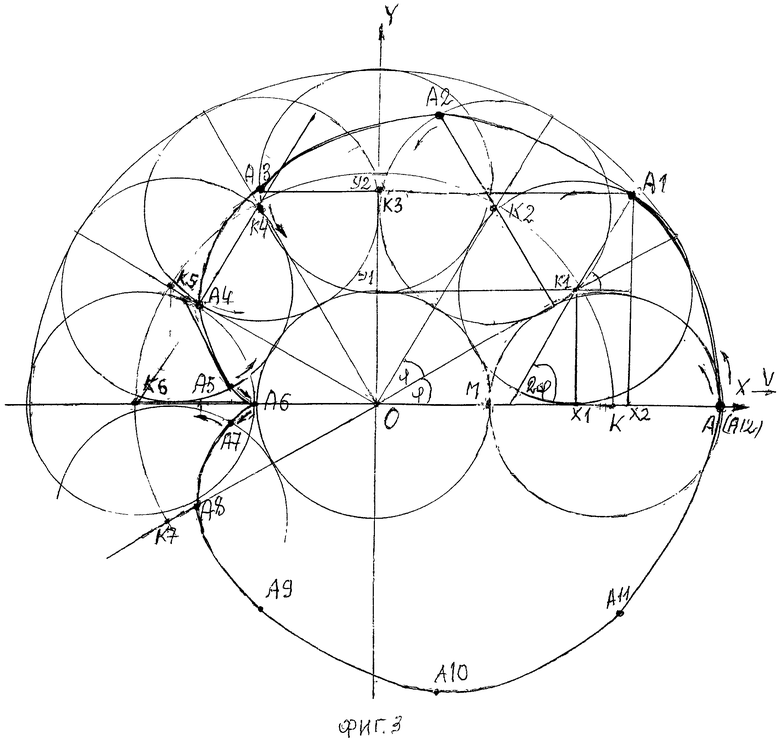
Фиг.3. Графическое построение кривой динамики движения груза прототипа.
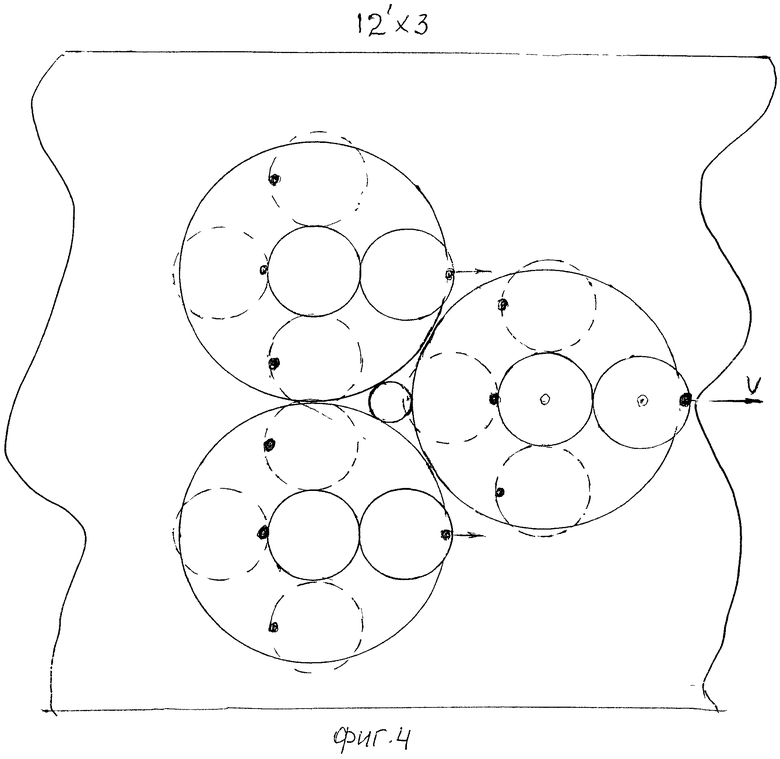
Фиг.4. Схема установки 3 идентичных приводов 12' прототипа.
Фиг.5а, 5б. К математическому обоснованию оптимального выбора эксцентрической кривой движения грузов.
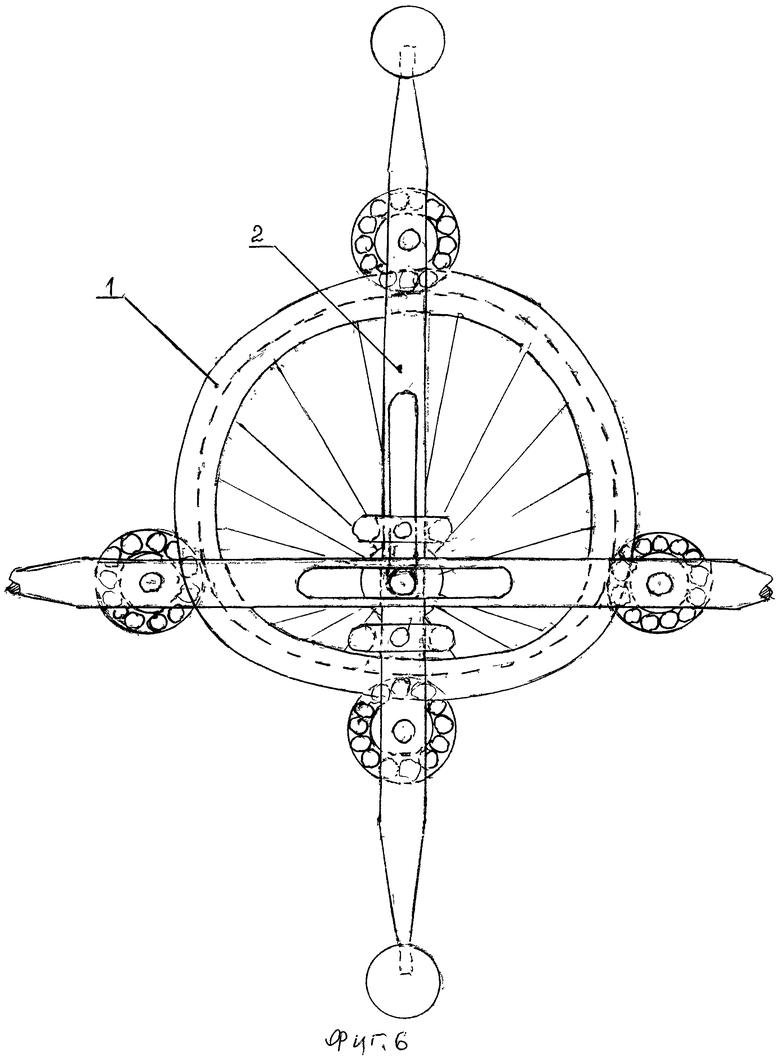
Фиг.6. Модель конструкции преобразователя на основе теоретических данных.
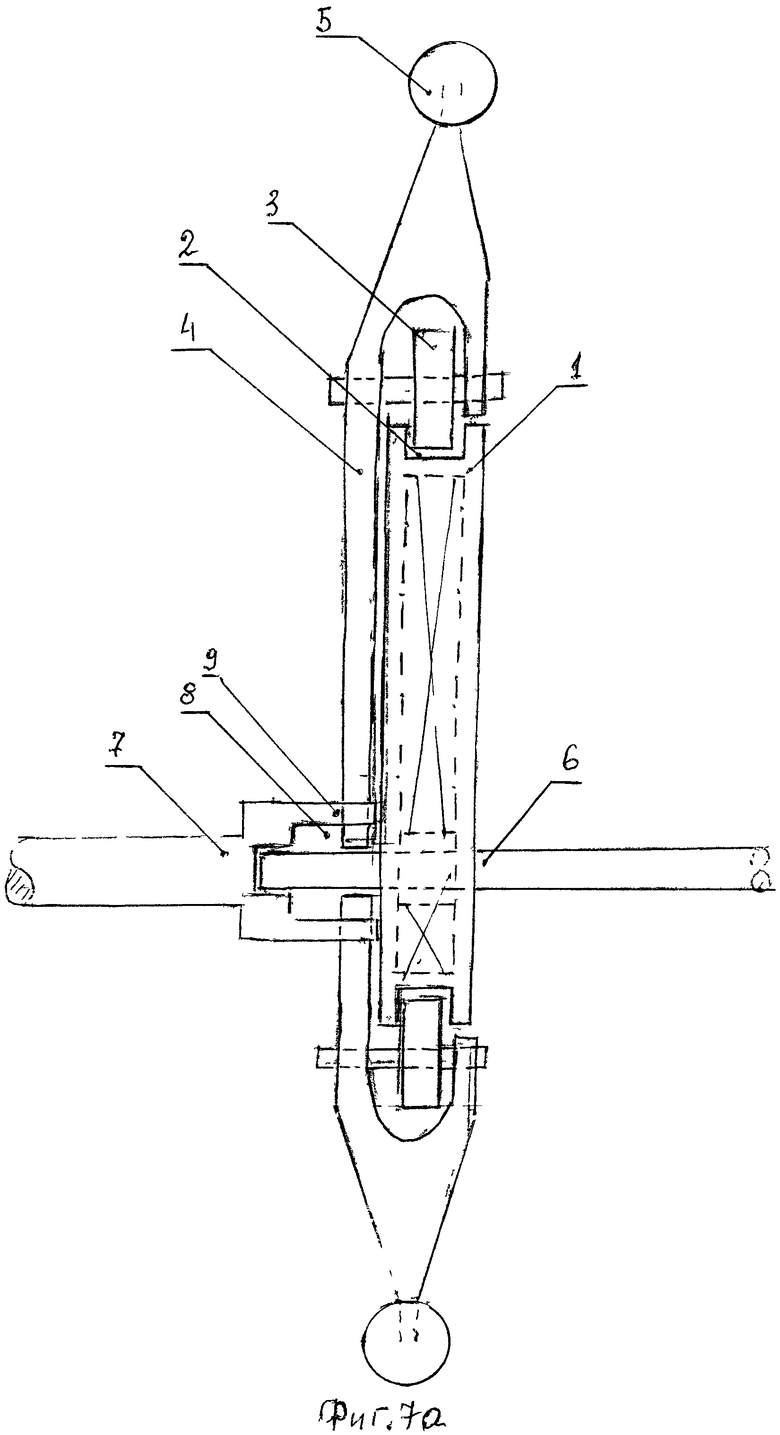
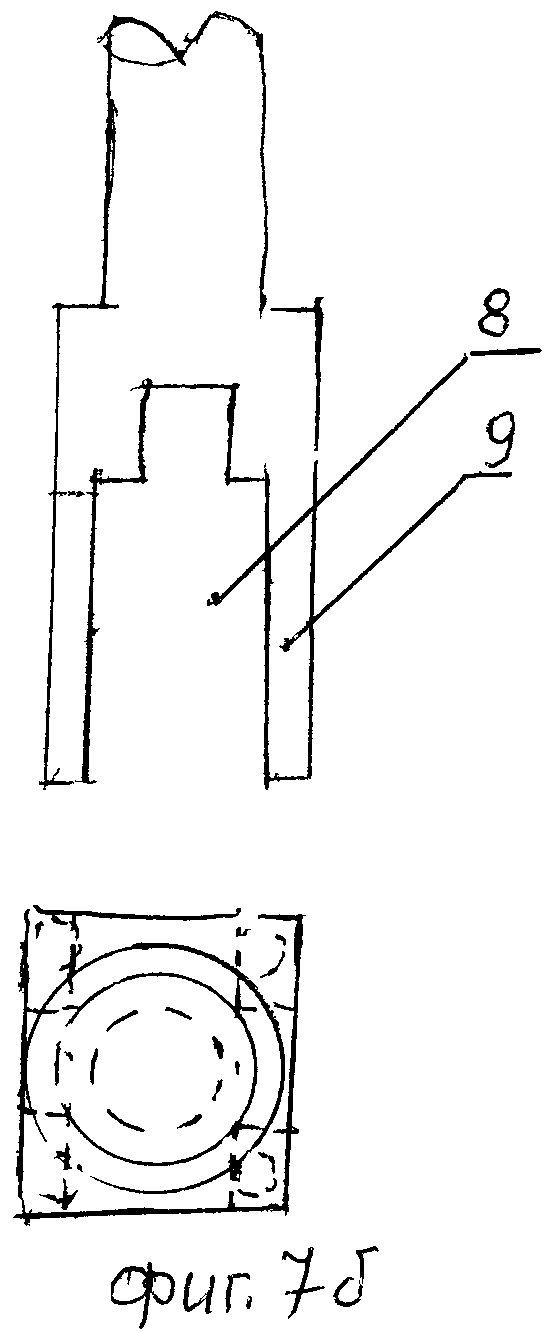
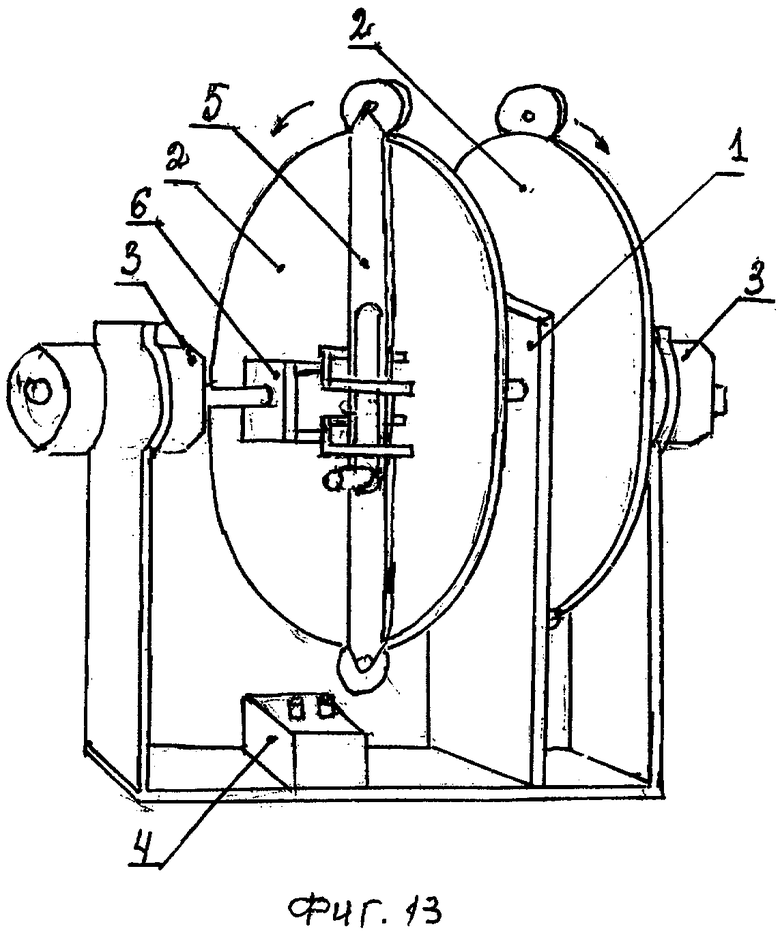
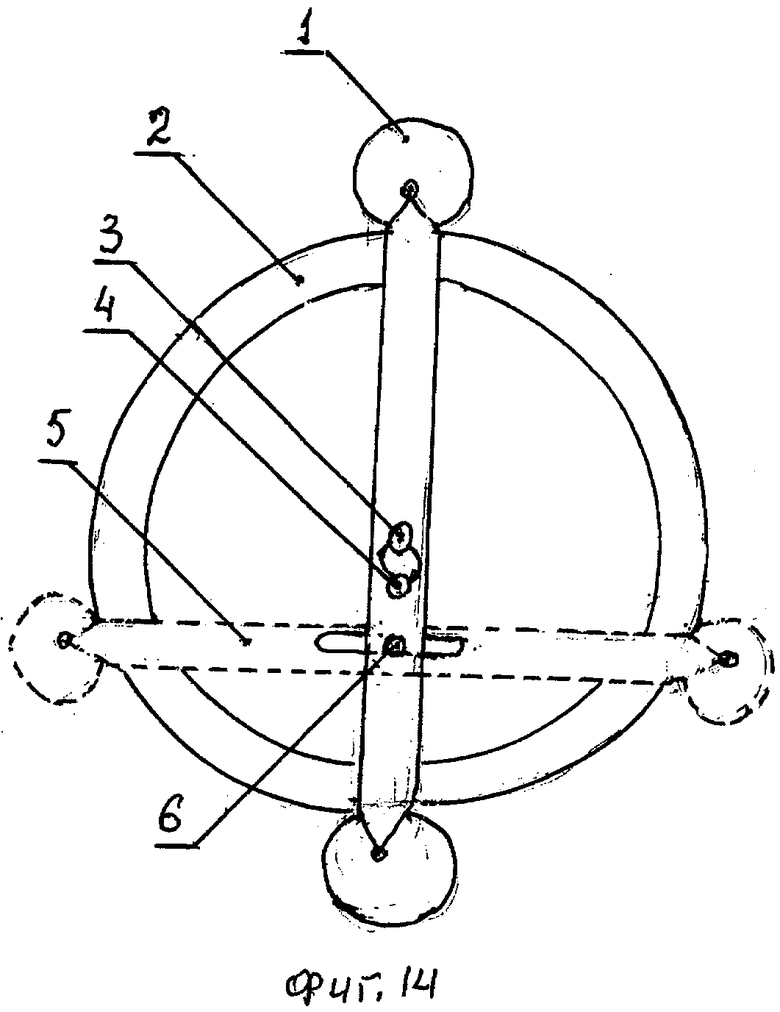
Фиг.7.а, б. К описанию конструкции преобразователя.
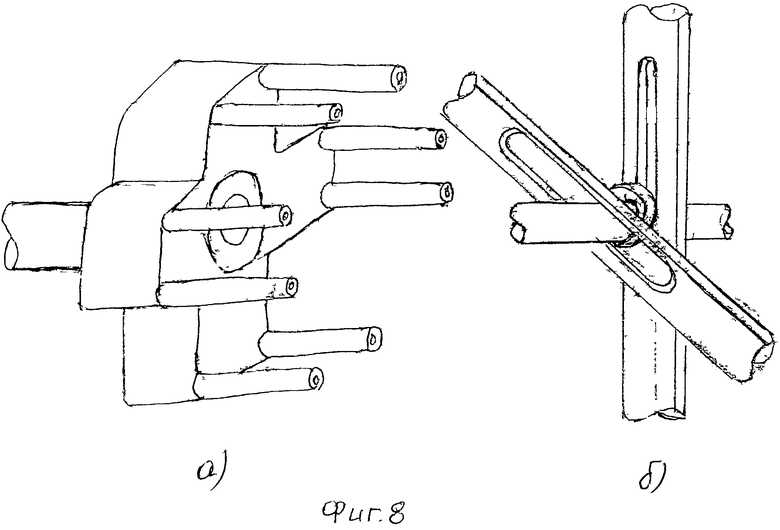
Фиг.8а, б. К описанию устройств элементов преобразователя.
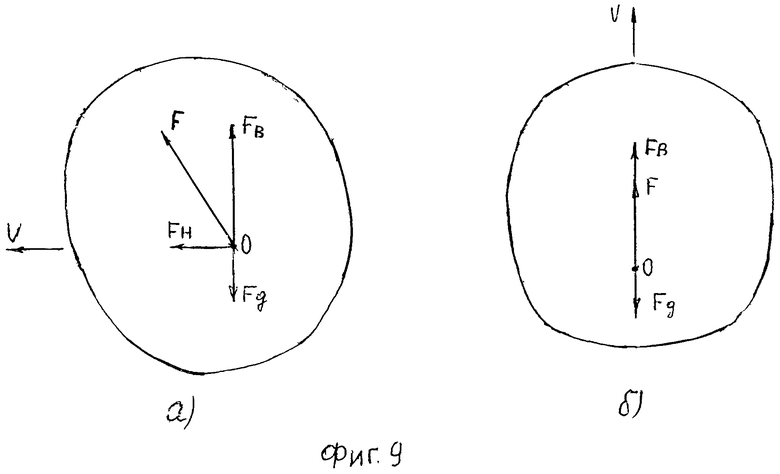
Фиг.9.а, б. Векторы сил, действующие на устройство при наклоне преобразователя в вертикальной плоскости.
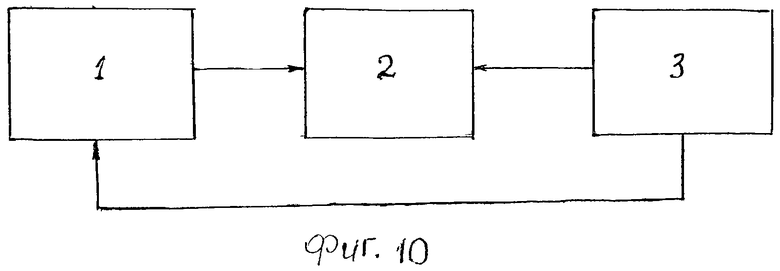
Фиг.10. Блок-схема устройства перемещения.
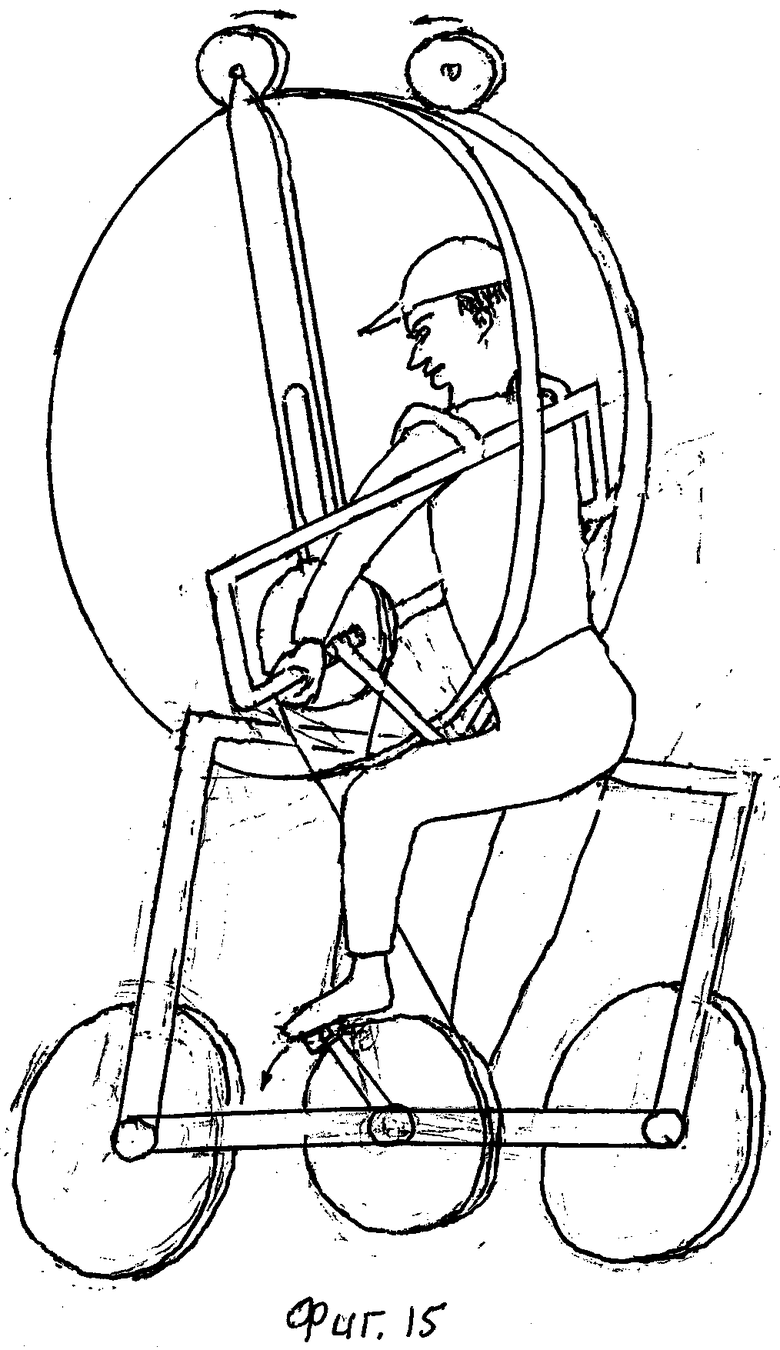
Фиг.11. Конструкция индивидуального устройства перемещения в стационарных и нестационарных условиях.
Источники информации
1. Д.А. Локтев. Металлорежущие станки. «Машиностроение", Москва, 1967.
2. И.М. Воронков. Курс теоретической механики. Гостехиздат, Москва, 1957.
3. Патент Франции 2.059.822., титульный лист прилагается.
4. Патент Германии DE 19909766 А1, титульный лист прилагается.
5. М.Я. Выгодский. Справочник по высшей математике. Государственное издательство физико-математической литературы, Москва, 1963.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ РЕЗАНИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1986 |
|
SU1823295A1 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ КРИВЫХ И ТРАЕКТОРИЙ ПРОГРАММНОГО ДВИЖЕНИЯ | 2002 |
|
RU2212342C1 |
| ЦЕНТРОБЕЖНЫЙ ПУЛЬПОВЫЙ НАСОС (ВАРИАНТЫ) | 2011 |
|
RU2484303C2 |
| МЕХАНИЧЕСКИЙ ДВИЖИТЕЛЬ | 2014 |
|
RU2565751C1 |
| РОТОРНО-ПЛАСТИНЧАТЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1990 |
|
RU2013593C1 |
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ | 2006 |
|
RU2329421C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ВО ВРАЩАТЕЛЬНОЕ ИЛИ НАОБОРОТ И ПРИМЕНЕНИЯ МЕХАНИЗМА | 2018 |
|
RU2767240C2 |
| СПОСОБ РАЗДЕЛЕНИЯ СЫПУЧИХ МАТЕРИАЛОВ ПО МАССЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2085304C1 |
| ИНЕРЦИОННЫЙ ДВИЖИТЕЛЬ УСТРОЙСТВА | 2005 |
|
RU2293037C1 |
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ | 2005 |
|
RU2308603C2 |
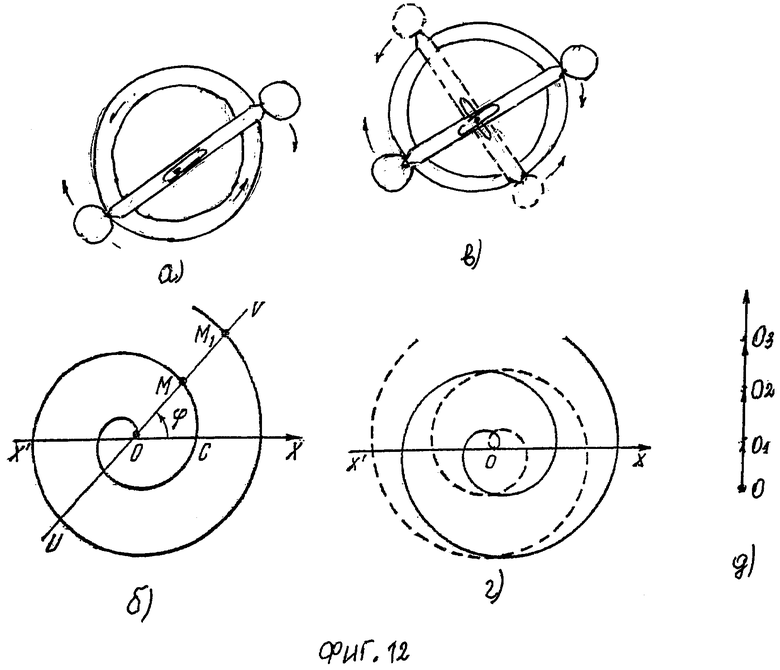
Изобретение относится к устройствам перемещения на основе преобразования вращательного движения в поступательное. Устройство перемещения в стационарных и нестационарных условиях на основе механизма вращения массивного тела, груза, в котором центр вращения груза эксцентричен относительно оси вращения механизма. В устройстве преобразования вращательного движения в поступательное создан механизм вращения штанги с грузами на концах, причем центр вращения штанги периодически смещается относительно приводной оси вращения, что обеспечивает движение грузов по эксцентрическому колесу и получение направляющей силы и перемещение устройства. Достигается упрощение устройства. 3 з.п. ф-лы, 15 ил.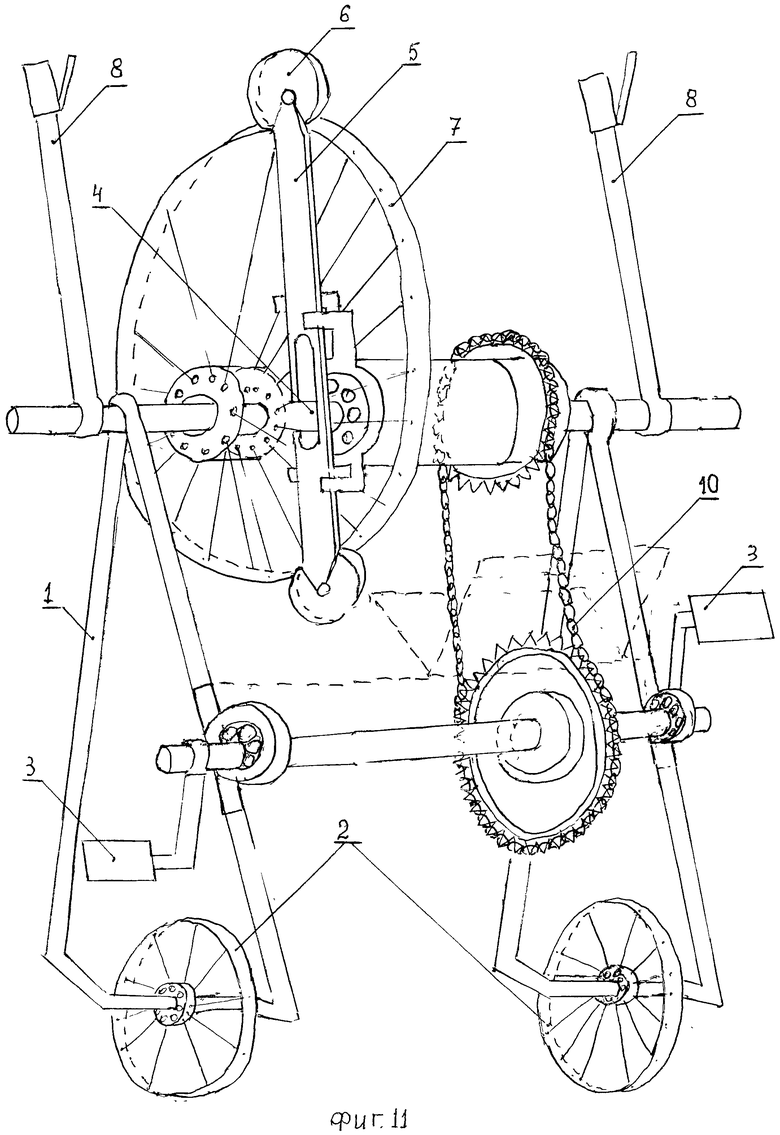
1. Устройство перемещения в стационарных и нестационарных условиях на основе механизма эксцентрического преобразования вращательного движения в поступательное, на основе механизма вращения массивного тела, груза, причем центр вращения груза эксцентричен относительно оси вращения механизма, в результате возникает направленная центробежная сила, отличающееся тем, что в устройстве преобразования вращательного движения в поступательное создан механизм вращения штанги с грузами на концах, причем центр вращения штанги периодически смещается относительно приводной оси вращения, это обеспечивает движение грузов по эксцентрическому колесу и получение направляющей силы и перемещение устройства.
2. Устройство по п.1, отличающееся тем, что на ось эксцентрического колеса устанавливаются две или более идентичные штанги с грузами, на корпус устройства устанавливается второе колесо со штангами, идентичное первому, двигатель через привод вращает штанги второго колеса в противоположную сторону от первого и синхронно с ним.
3. Устройство по п.2, отличающееся тем, что на общем корпусе устройства устанавливаются органы управления, при помощи которых производится управление устройством в горизонтальной и вертикальной плоскостях, что дает возможность перемещению устройства в различных средах.
4. Устройство по п.3, отличающееся тем, что в качестве двигателя используется мускульная сила человека с передачей усилий через цепной или другой привод на штанги с грузами и колеса, для чего введены рама, сиденье, педали, рули управления, чем создается индивидуальное устройство перемещения.
| FR 2059822 A5, 04.06.1971 | |||
| DE 19909766 A1, 30.09.1999 | |||
| RU 98113689 A, 10.05.2000 | |||
| RU 99100919 A, 27.01.2001 |

