[0001] Изобретение относится к механизму для преобразования возвратно-поступательного перемещения во вращательное перемещение или наоборот по п. 1. Оно также относится к применениям указанного механизма, таким как в клапанах, регулирующих поток текучей среды, в поршневых машинах, таких как двигатели или насосы/компрессоры, в системах автоматизации, а также в муфтах сцепления, дифференциалах, устройстве для увеличения/уменьшения скорости вращения/возвратно-поступательного перемещения и электромеханических соединениях в электрогенераторах/электродвигателях.
[0002] Наиболее известным и широко распространенным механизмом для преобразования прямолинейного возвратно-поступательного перемещения во вращательное перемещение является поршневой кривошипно-шатунный механизм. Он широко применяется в поршневых машинах (двигателях или насосах/компрессорах), обычно работающих с воздухом, водой (жидкостью или паром), маслом и топливом в жидком или газообразном состоянии (например, углеводородами, водородом и т.п.). Управление потоком каждой рабочей текучей среды достигается клапанами различных типов, открывающимися и закрывающимися с использованием множества различных способов или механизмов (например, силы тяжести, пружин, стержней, кулачковых валов и т.п.).
[0003] Серьезным недостатком поршневого кривошипно-шатунного механизма, а также машин на основе этого механизма является сложность и большое количество перемещающихся частей. То же применимо также к кинематическим свойствам, относящимся к положению, скорости и ускорению перемещающихся частей, а также вибрациям, вызываемым вырабатываемыми силами инерции. Вот почему необходима балансировка механизма; однако балансировка полностью не решает проблему из-за остающихся гармоник более высокого порядка. Кроме того, в ДВС (двигателях внутреннего сгорания) недостатки указанного механизма также включают неспособность поршня оставаться в верхней мертвой точке (ВМТ) и нижней мертвой точке (НМТ) в течение определенного временного интервала для улучшения сгорания и повышения эффективности, а также обеспечения соответствующего времени для выпуска/продувки выхлопных газов из цилиндра, что является необходимым в двухтактных машинах соответственно.
[0004] Настоящее изобретение относится к простому механизму для преобразования прямолинейного возвратно-поступательного перемещения во вращательное перемещение или наоборот без коленчатого вала и поршневого штока, способному обеспечивать возможность задержки при смене направления перемещения в крайних положениях возвратно-поступательного перемещения (ВМТ и НМТ). В то же время он обеспечивает возможность использования конфигурации клапана с простыми отверстиями для управления потоком текучей среды. Это также относится к продуктам, которые могут содержать конфигурацию указанного механизма и/или клапана с простыми отверстиями, таким как, например, поршневые машины (двигатели или насосы/компрессоры), муфты сцепления, дифференциалы, устройство для увеличения/уменьшения скорости вращения/возвратно-поступательного перемещения, электромеханические соединения в электрогенераторах/электродвигателях и системах автоматизации.
[0005] Согласно настоящему изобретению предложен механизм для преобразования возвратно-поступательного перемещения во вращательное перемещение или наоборот, содержащий первый кольцевой компонент и второй кольцевой компонент, соосно установленные рядом друг с другом вдоль продольной оси, причем оба выполнены с возможностью вращения вокруг продольной оси и с возможностью возвратно-поступательного перемещения вдоль продольной оси, при этом сторона первого кольцевого компонента рядом со вторым кольцевым компонентом находится в непрерывном контакте по меньшей мере в одной точке с соседней стороной второго кольцевого компонента, причем контактирующие стороны являются гладкими волнистыми поверхностями, образованными в виде геометрического места радиусов, проходящих через гладкие волнистые кривые наружной цилиндрической поверхности первого и второго кольцевых компонентов, начинающиеся от их наружной поверхности и завершающиеся на их внутренней поверхности, отличающиеся числом n (натуральное число ≠0) повторяющихся пар вершин и впадин, причем указанные вершины/впадины симметричны относительно уровня, заданного самой верхней/самой нижней точкой вершины/впадины (соответственно) и продольной осью.
[0006] Согласно настоящему изобретению вершины волнистой поверхности первого кольцевого компонента выполнены с возможностью контакта с вершинами волнистой поверхности второго кольцевого компонента, и в этом положении точки контакта расположены в плоскости, перпендикулярной продольной оси, относительно которой волнистые поверхности первого кольцевого компонента и второго кольцевого компонента являются симметричными.
[0007] Кроме того, вершины каждой волнистой поверхности меньше, чем геометрически подобные впадины, с отношением 1:3 подобия, так что, когда вершины входят во впадины другой поверхности, и края вершины входят в контакт с самой нижней точкой впадин противоположной волнистой поверхности, имеется свободное пространство, оставшееся между волнистыми поверхностями, в результате чего при смазке вследствие динамического смазывания достигается минимизация трения и износа.
[0008] С предложенным механизмом, когда первый кольцевой компонент и второй кольцевой компонент принуждены совершать вращательное перемещение относительно друг друга, в то же время оставаясь в непрерывном контакте, каждая точка контактирующих волнистых поверхностей вычерчивает относительно другой поверхности волнистую траекторию и в то же время совершает относительно другой поверхности возвратно-поступательное перемещение с частотой n раз, причем n является количеством вершин/впадин, соответствующей частоте вращательного перемещения, между ВМТ (верхней мертвой точкой) и НМТ (нижней мертвой точкой), при этом указанное относительное перемещение выполняется каждым компонентом, прочно соединенным с одним из кольцевых компонентов, тогда как каждый компонент, например, поршень, соединенный с одним из кольцевых компонентов таким образом, что этот соединенный компонент выполнен с возможностью не следовать за вращением компонента, с которым он соединен, выполняет только возвратно-поступательное перемещение относительно другого кольцевого компонента таким образом, что вращательное перемещение преобразуется в возвратно-поступательное перемещение компонента с одновременным вращением или без него, в то время как, наоборот, принудительное возвратно-поступательное перемещение одного кольцевого компонента относительно другого кольцевого компонента преобразуется во вращательное перемещение компонента с одновременным возвратно-поступательным перемещением или без него.
[0009] Края вершин и впадин волнистых поверхностей двух кольцевых компонентов могут быть точками или прямыми участками, перпендикулярными продольной оси, причем когда края вершин и впадин являются точками, в случае относительного вращательного перемещения между двумя кольцевыми компонентами с постоянной скоростью результатом является в целом простое и в особых случаях гармоническое возвратно-поступательное перемещение, тогда как если края вершин и впадин являются прямыми участками, в случае относительного вращательного перемещения между двумя кольцевыми компонентами с постоянной скоростью результатом является возвратно-поступательное перемещение с задержкой при смене направления перемещения на противоположное в ВМТ и НМТ, пропорциональной длине прямых участков. Возвратно-поступательное перемещение является гармоническим в случае, когда плоская развертка указанных кривых содержит синусоидальные кривые без прямых участков в вершинах, перпендикулярных продольной оси.
[0010] ПРИМЕЧАНИЕ 1: В предыдущем абзаце, а также в последующем описании, как и в формуле, всякий раз, когда для простоты и краткости изложения ссылка делается на "точки или прямые участки" краев вершины и впадины и на "кривые" фронтальных волнистых поверхностей кольцевых компонентов, в действительности эта ссылка подразумевает плоскую развертку волнистых кривых наружных поверхностей первого, второго и, если таковой присутствует, третьего кольцевого компонента, из которых исходят радиусы, образующие смежные (соседние) волнистые поверхности кольцевых компонентов.
[0011] ПРИМЕЧАНИЕ 2: В описании, а также в формуле всякий раз, когда ссылка сделана на контакт "по меньшей мере в одной точке" между первым и вторым или вторым и третьим кольцевыми компонентами 1 и 2 или 2 и 3 соответственно, указанная точка предназначена для обозначения положения. Фактический контакт имеет место в прямых участках радиусов, образующих волнистые поверхности кольцевых компонентов 1, 2 и 3, которые под нагрузкой преобразуются в узкие полосы: фактически в узкие неправильные четырехугольники.
[0012] Второй кольцевой компонент может функционировать в качестве ротора, а первый компонент в качестве статора, или наоборот. В настоящем описании представлены применения, в которых второй кольцевой компонент функционирует в качестве ротора, а первый компонент в качестве статора.
[0013] В различных применениях обеспечен дополнительный механизм, поджимающий второй кольцевой компонент к первому кольцевому компоненту, так что контактирующие волнистые поверхности находятся в непрерывном контакте друг с другом.
[0014] На ФИГ. 1-20 показан принцип действия механизма и его применения. Эти чертежи в точности не следуют принципам машиностроительного черчения. Эти иллюстрации выполнены далеко не во всех подробностях, и содержат упрощения, основными из которых являются следующие:
a. На ФИГ. 5-13 не показаны полные виды, только половинные виды: расположение с позицией ротора и поршня в ВМТ показано справа и в НМТ слева.
b. Определенные компоненты, известные специалисту в данной области техники, показаны в качестве одиночной цельной части, однако в действительности они являются узлами, содержащими более чем один компонент.
c. Обычные части машины, известные специалисту в данной области техники (например, винты, шарикоподшипники, втулки, уплотняющие прокладки, фланцы и т.п.), не показаны.
d. Уменьшенные осевые линии указывают, что соседние компоненты прочно соединены вместе.
[0015] На ФИГ. 1, 2, 3 и 4 упрощенно показан принцип действия, на котором основано настоящее изобретение, в то время как на ФИГ. 2 (в верхней части) упрощенно показан простой массив клапанов, управляющих потоком текучей среды, согласно настоящему изобретению.
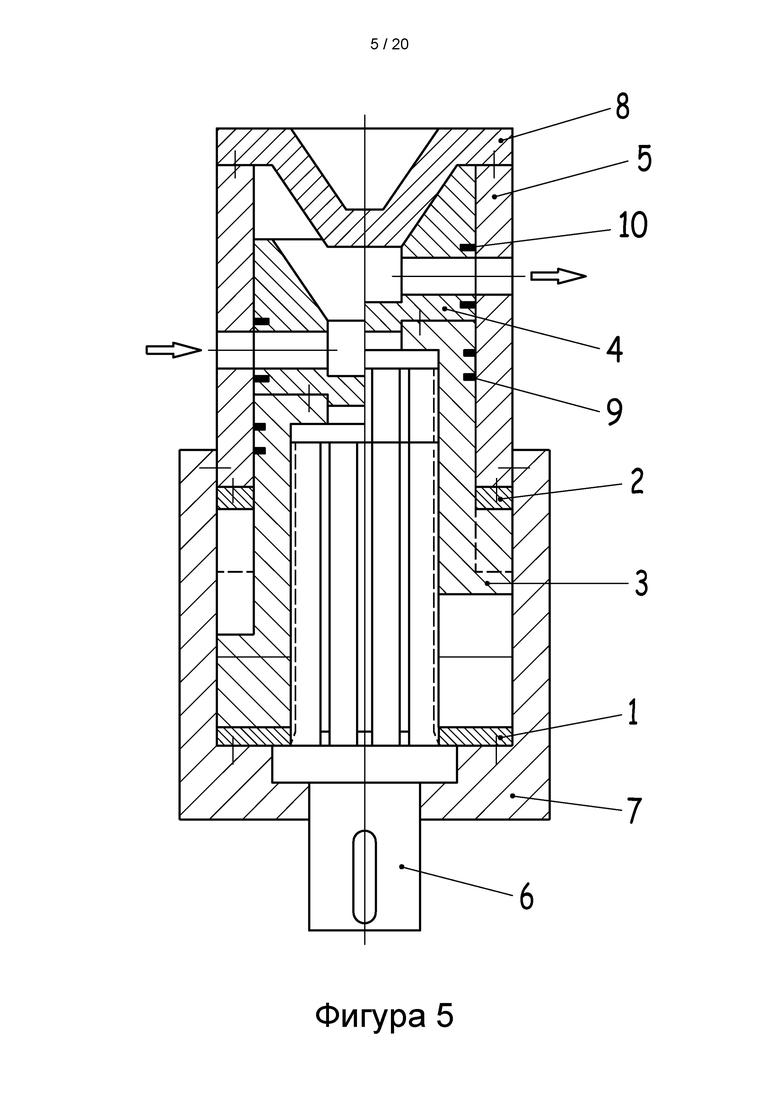
[0016] На ФИГ. 5 показан цилиндр поршневой машины, имеющей механизм для преобразования перемещения согласно настоящему изобретению, клапаны с отверстиями, ротор, взаимодействующий с осью посредством шлица, а также поршень, совершающий возвратно-поступательное перемещение с одновременным вращением.
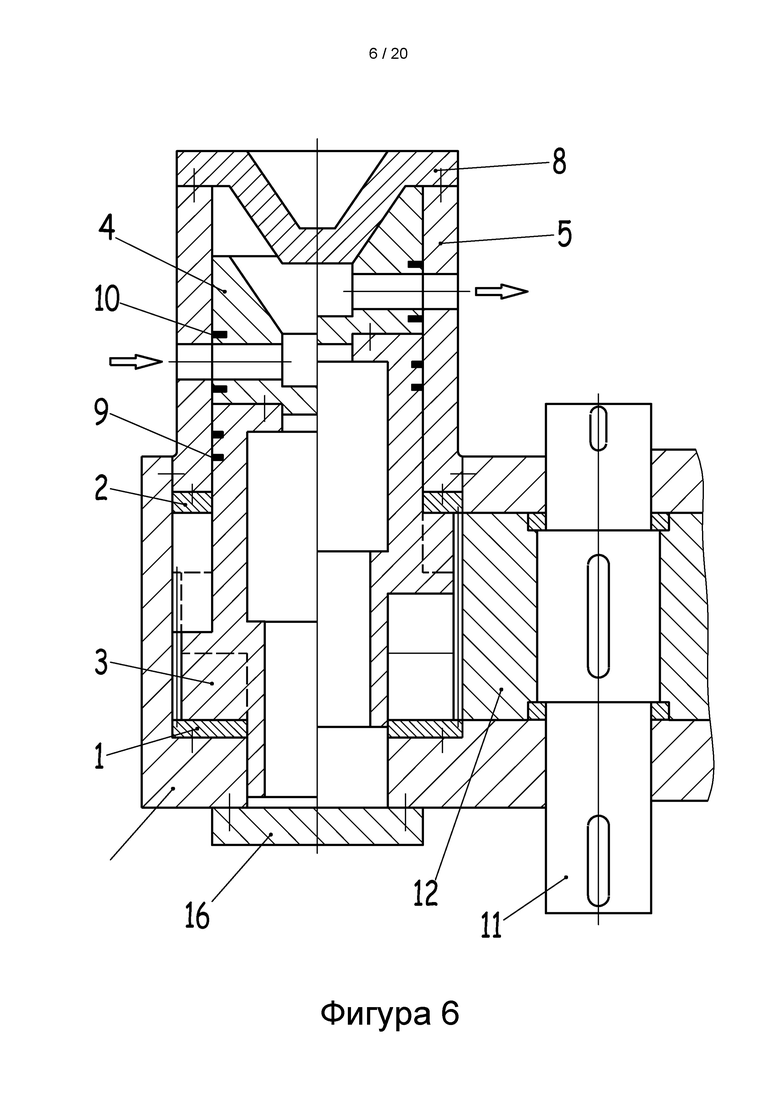
[0017] На ФИГ. 6 показан цилиндр по ФИГ. 5, отличающийся тем, что статором также является зубчатое колесо, взаимодействующее с вращающейся осью.
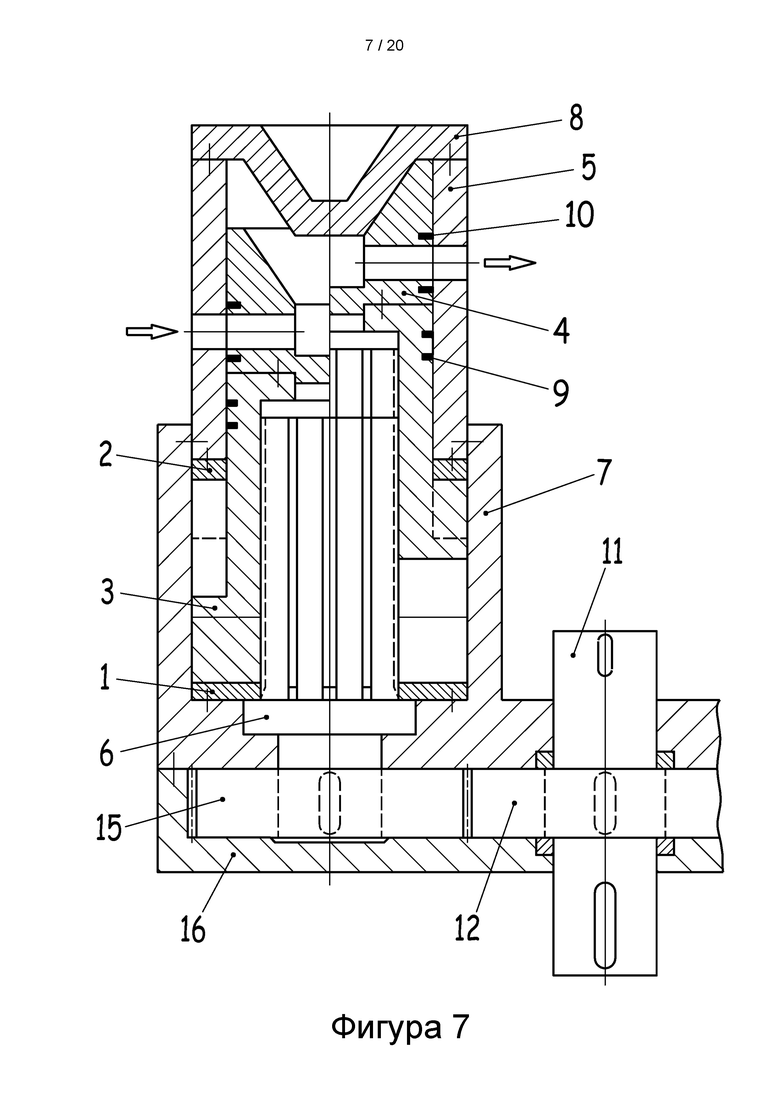
[0018] На ФИГ. 7 показан цилиндр по ФИГ. 5, отличающийся тем, что ось соединена с зубчатым колесом, взаимодействующим с вращающейся осью.
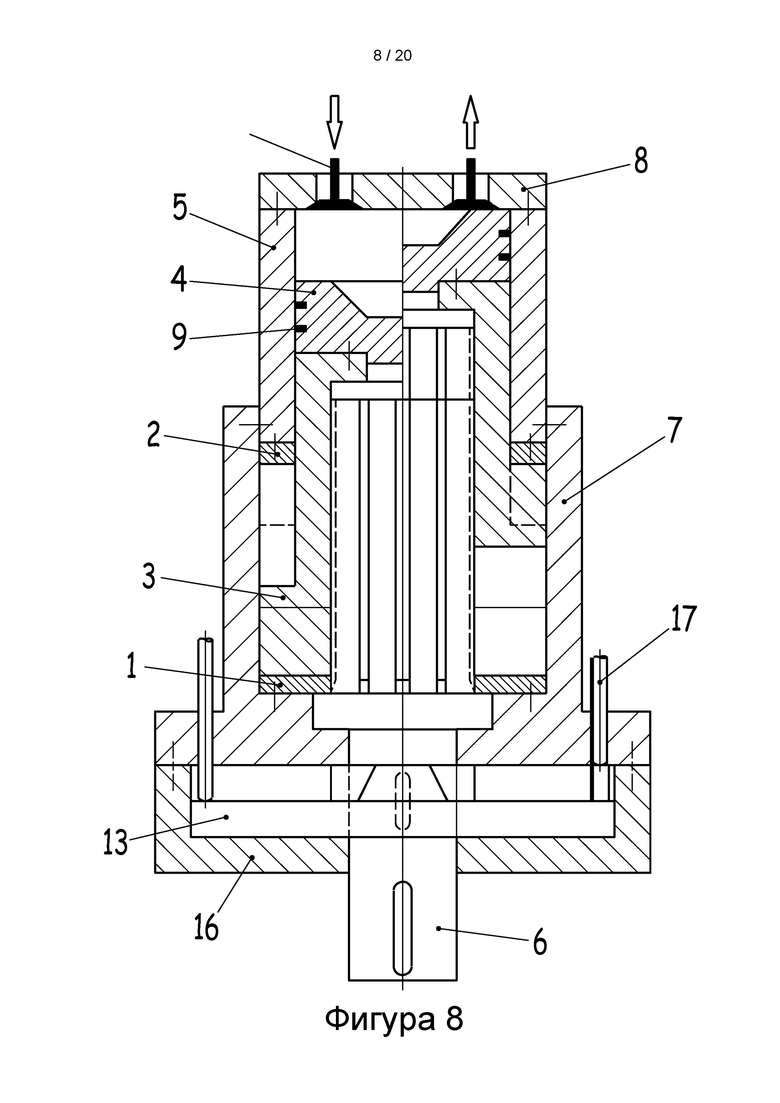
[0019] На ФИГ. 8 показан цилиндр поршневого двигателя внутреннего сгорания, имеющего механизм для преобразования перемещения согласно настоящему изобретению, известные клапаны, ротор, взаимодействующий с осью посредством шлица, дисковидный кулачок на оси, а также поршень, совершающий возвратно-поступательное перемещение с одновременным вращением.
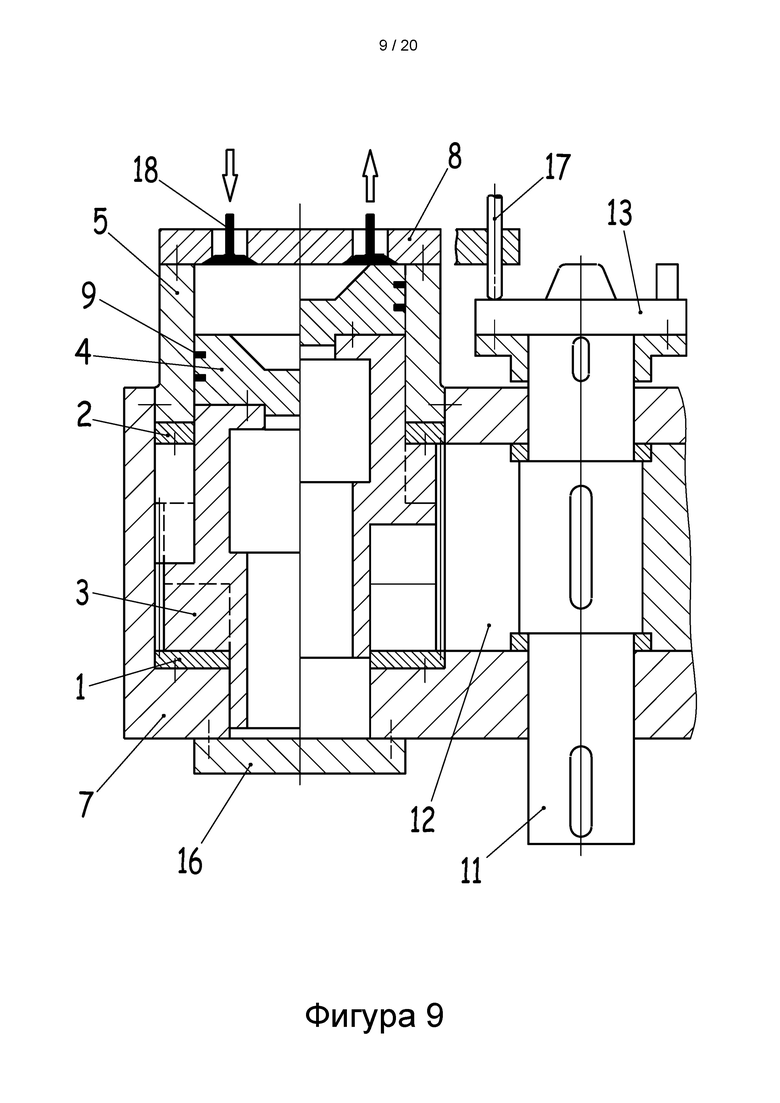
[0020] На ФИГ. 9 показан цилиндр по ФИГ. 8, отличающийся тем, что статором также является зубчатое колесо, взаимодействующее с вращающейся осью.
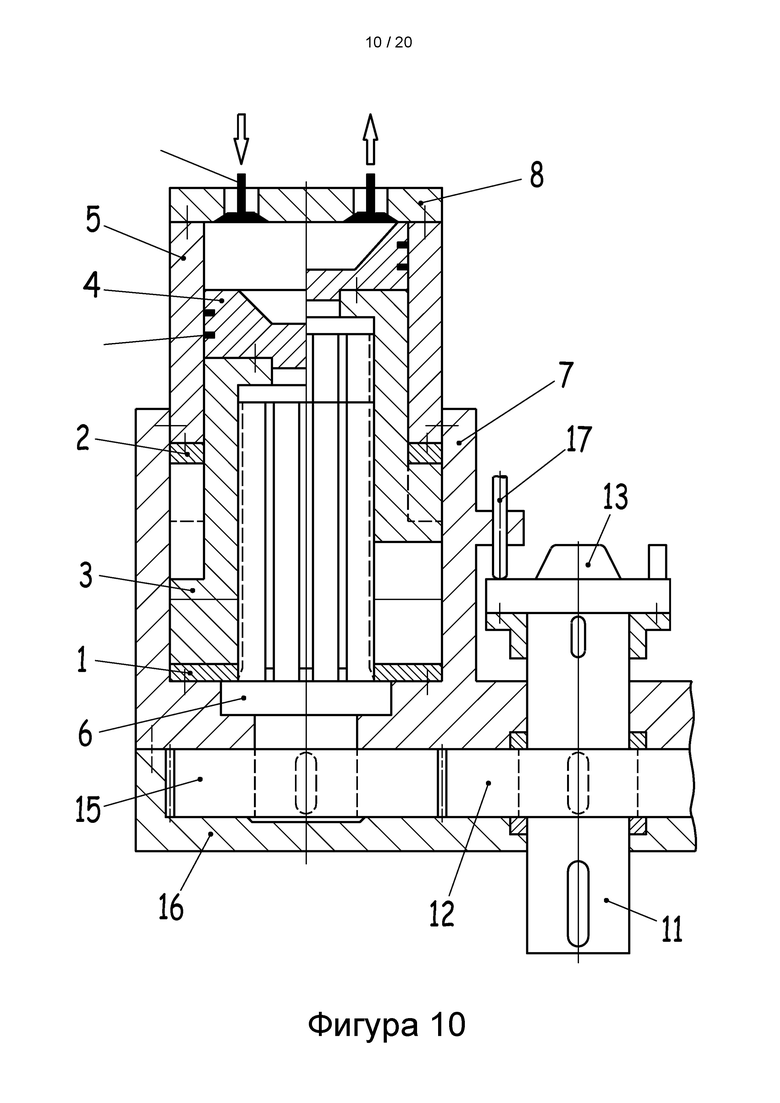
[0021] На ФИГ. 10 показан цилиндр по ФИГ. 8, отличающийся тем, что ось соединена с зубчатым колесом, взаимодействующим с вращающейся осью.
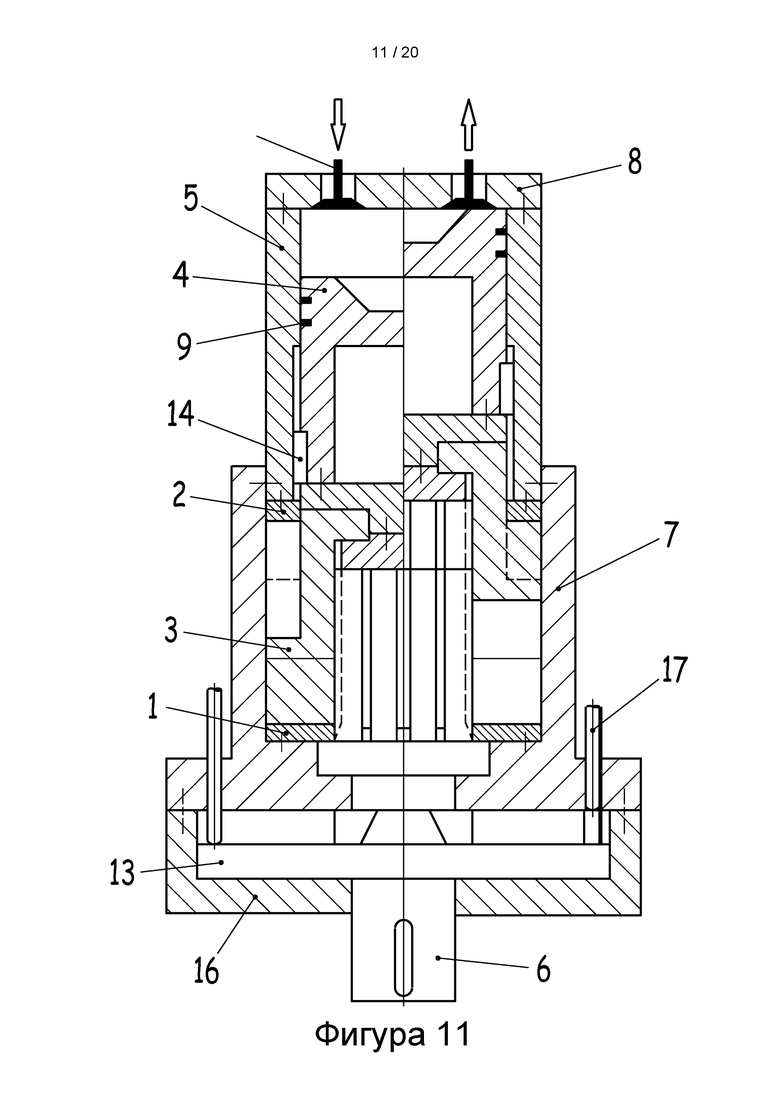
[0022] На ФИГ. 11 показан цилиндр по фиг. 8, отличающийся тем, что поршень совершает возвратно-поступательное перемещение без вращения.
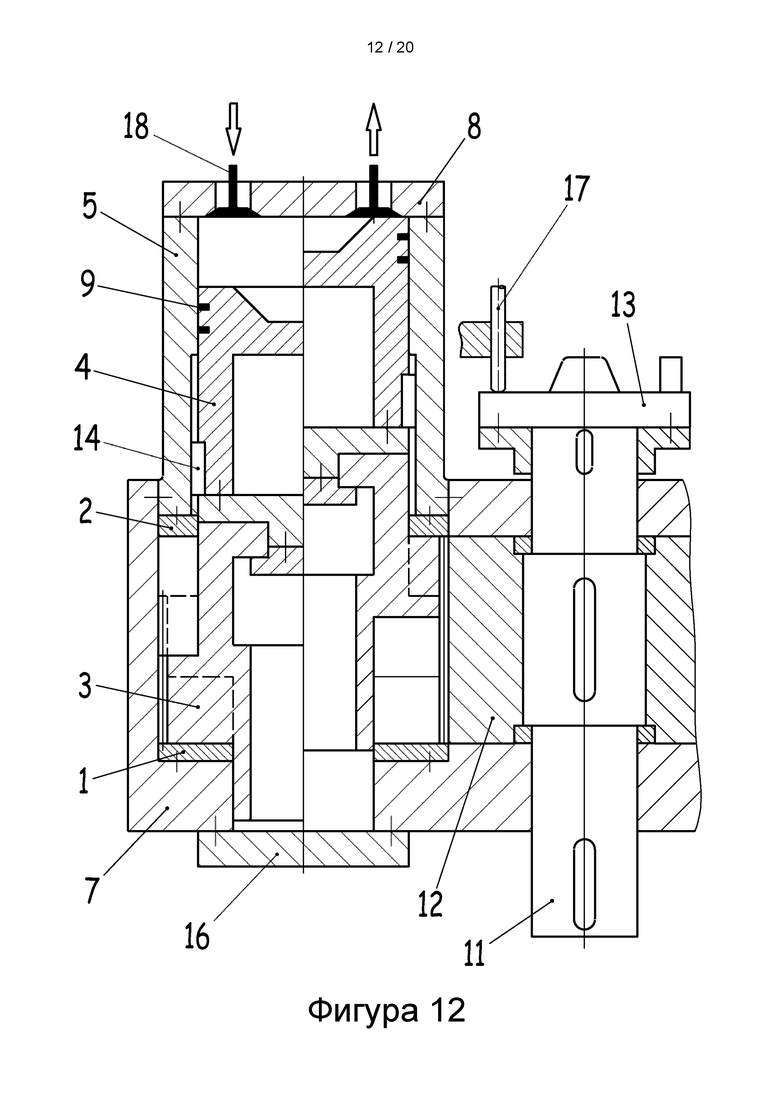
[0023] На ФИГ. 12 показан цилиндр по фиг. 9, отличающийся тем, что поршень совершает возвратно-поступательное перемещение без вращения.
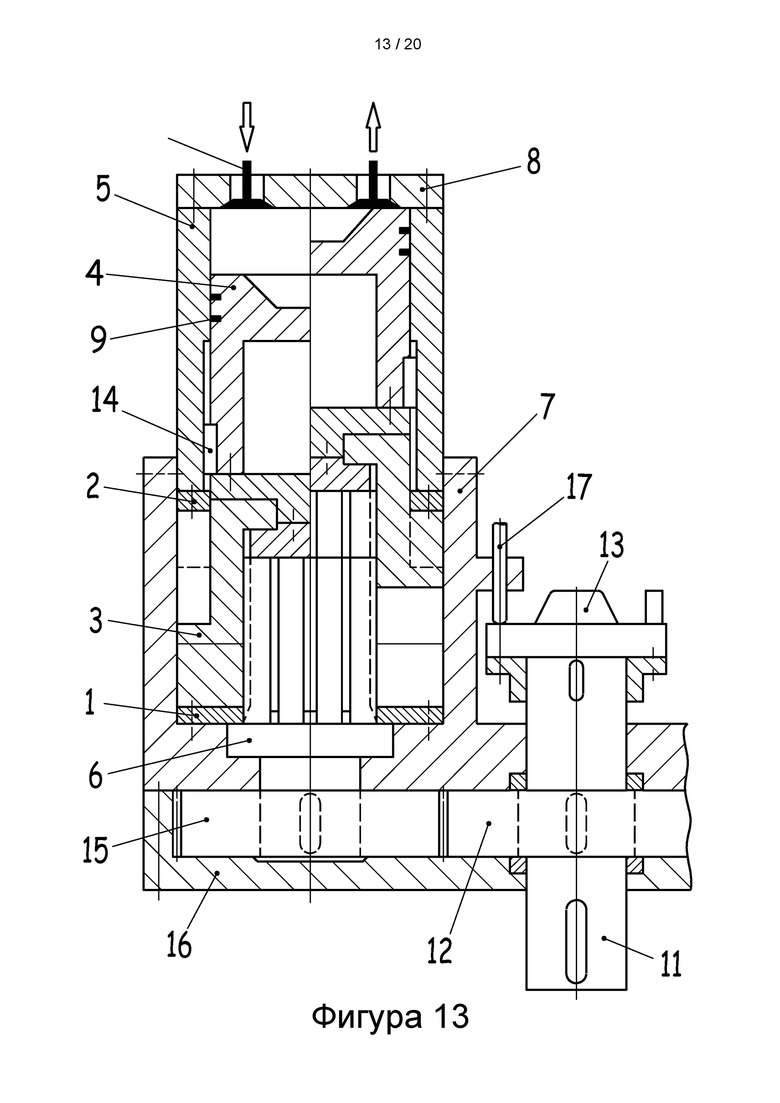
[0024] На ФИГ. 13 показан цилиндр по фиг. 10, отличающийся тем, что поршень совершает возвратно-поступательное перемещение без вращения.
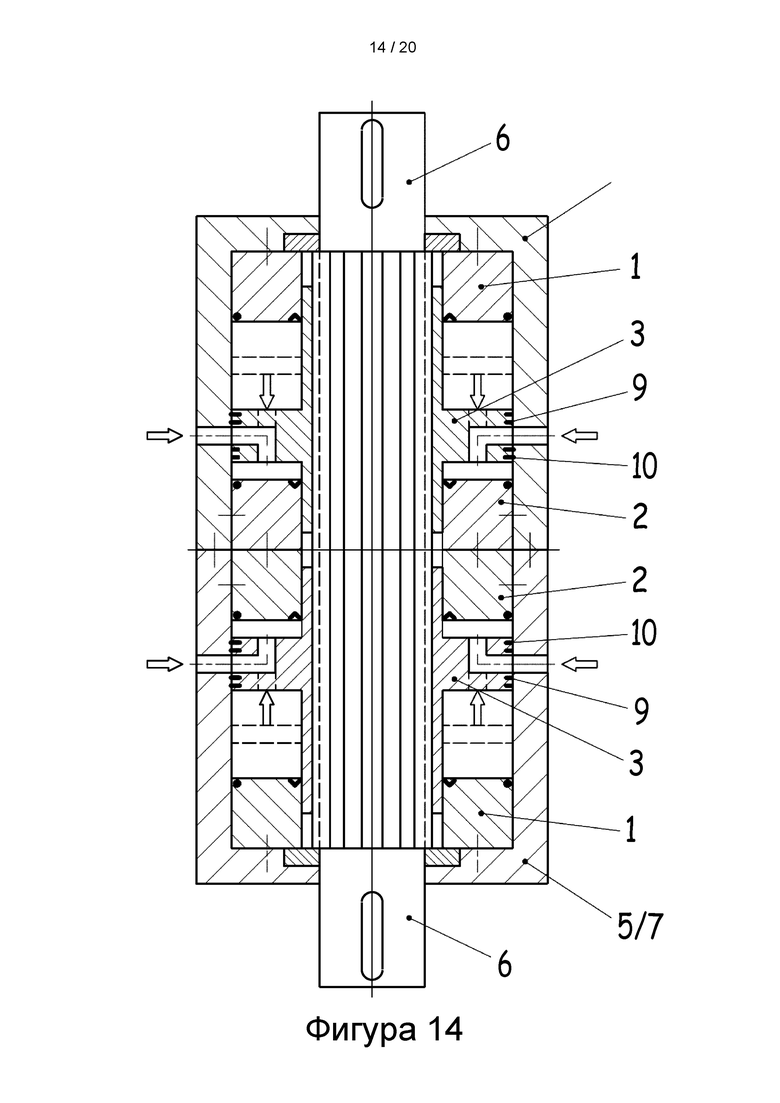
[0025] На ФИГ. 14 показана зеркально симметричная двухцилиндровая поршневая машина двойного действия с механизмом для преобразования перемещения согласно настоящему изобретению, клапанами с отверстиями или известными клапанами, ротором, взаимодействующим с осью посредством шлица, причем ротор также является заменой поршня, поскольку рабочая текучая среда работает между указанными двумя статорами, ротором и цилиндрическим корпусом.
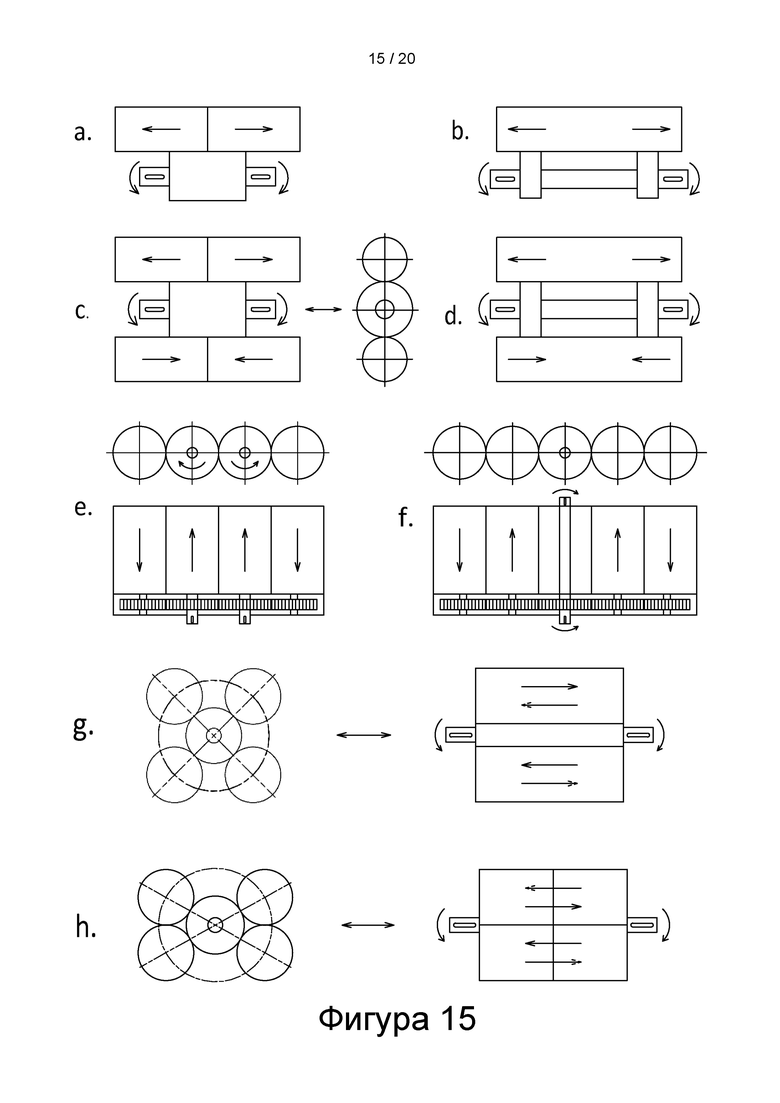
[0026] На ФИГ. 15 показаны многоцилиндровые конфигурации, основанные на ФИГ. 5-14, в которых достигнута абсолютная нейтрализация сил инерции, порождаемых массами ротора и поршня при возвратно-поступательном перемещении.
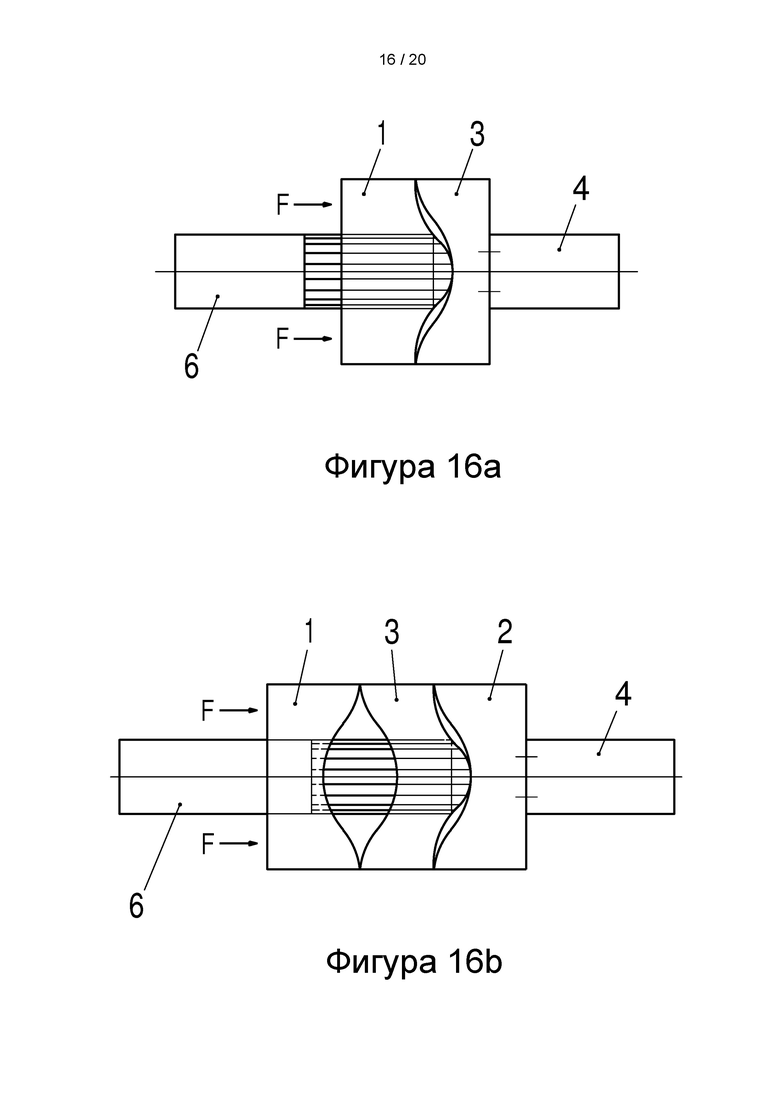
[0027] На ФИГ. 16 показаны конфигурации муфт сцепления, основанных на механизме для преобразования перемещения согласно настоящему изобретению.
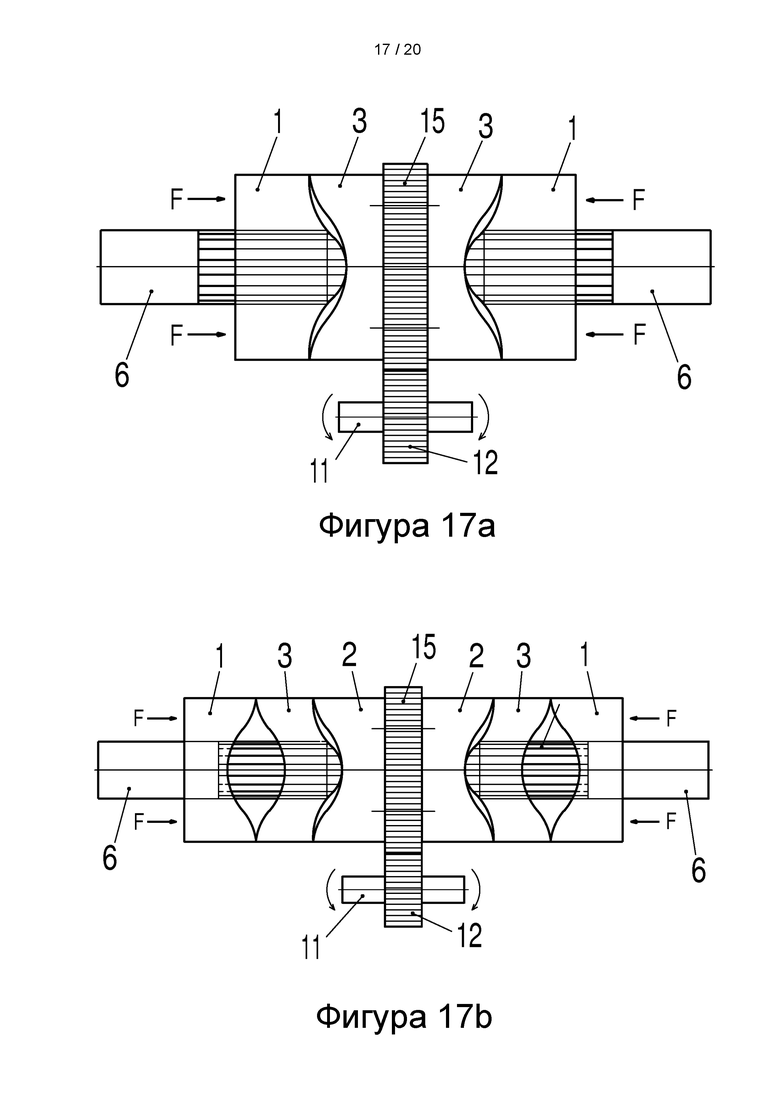
[0028] На ФИГ. 17 показаны конфигурации дифференциалов, основанных на механизме для преобразования перемещения согласно настоящему изобретению.
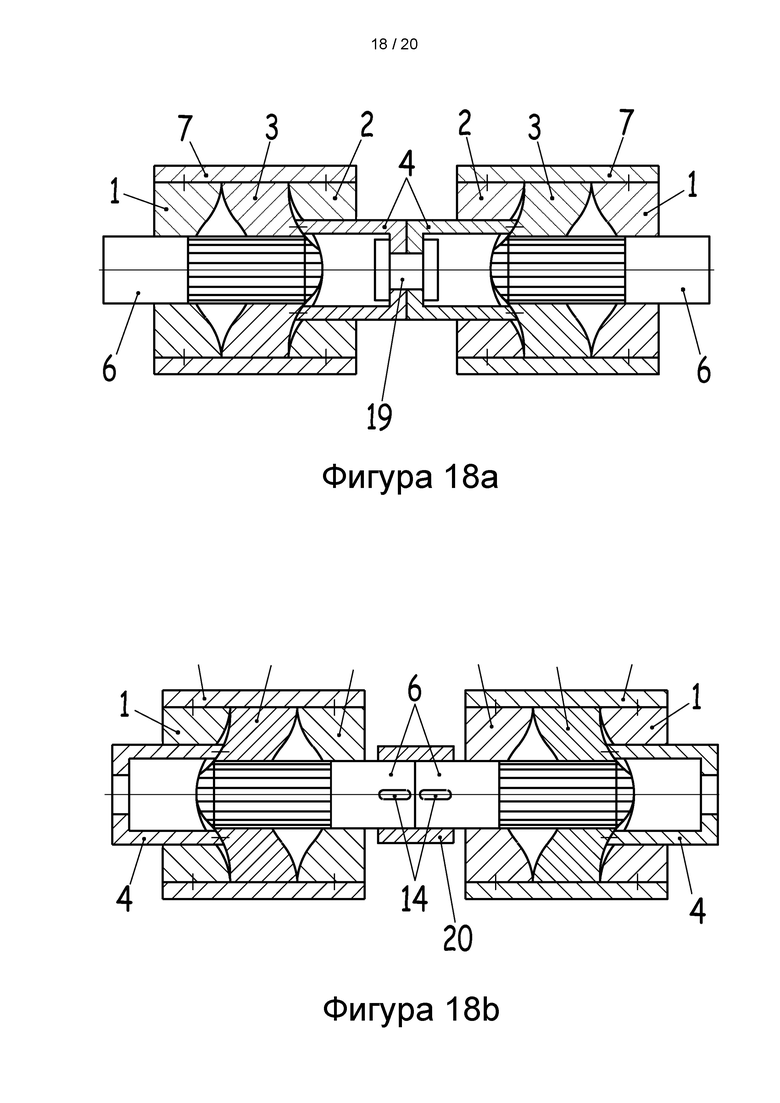
[0029] На ФИГ. 18 показаны конфигурации устройства для увеличения/уменьшения скорости вращения/возвратно-поступательного перемещения на основе механизма для преобразования перемещения согласно настоящему изобретению.
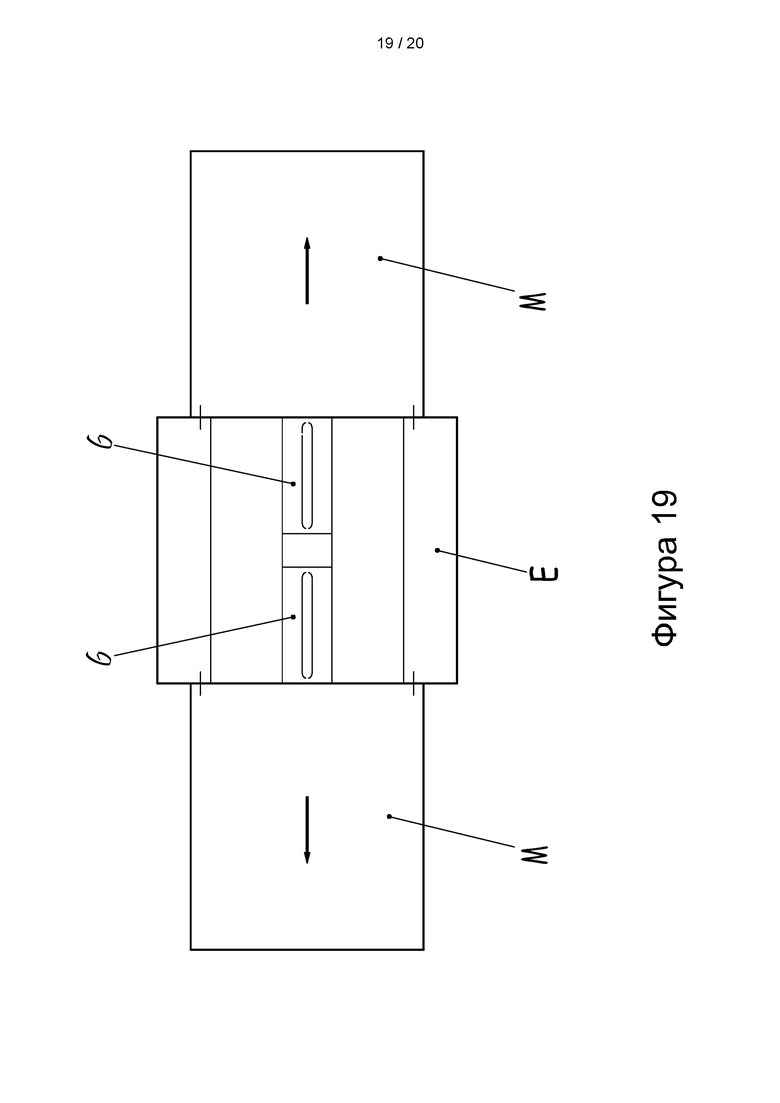
[0030] На ФИГ. 19 показано соединение электрической машины (электрогенератора/электродвигателя) с двумя машинами (двигателями или насосами/компрессорами соответственно), основанное на механизме для преобразования перемещения согласно настоящему изобретению.
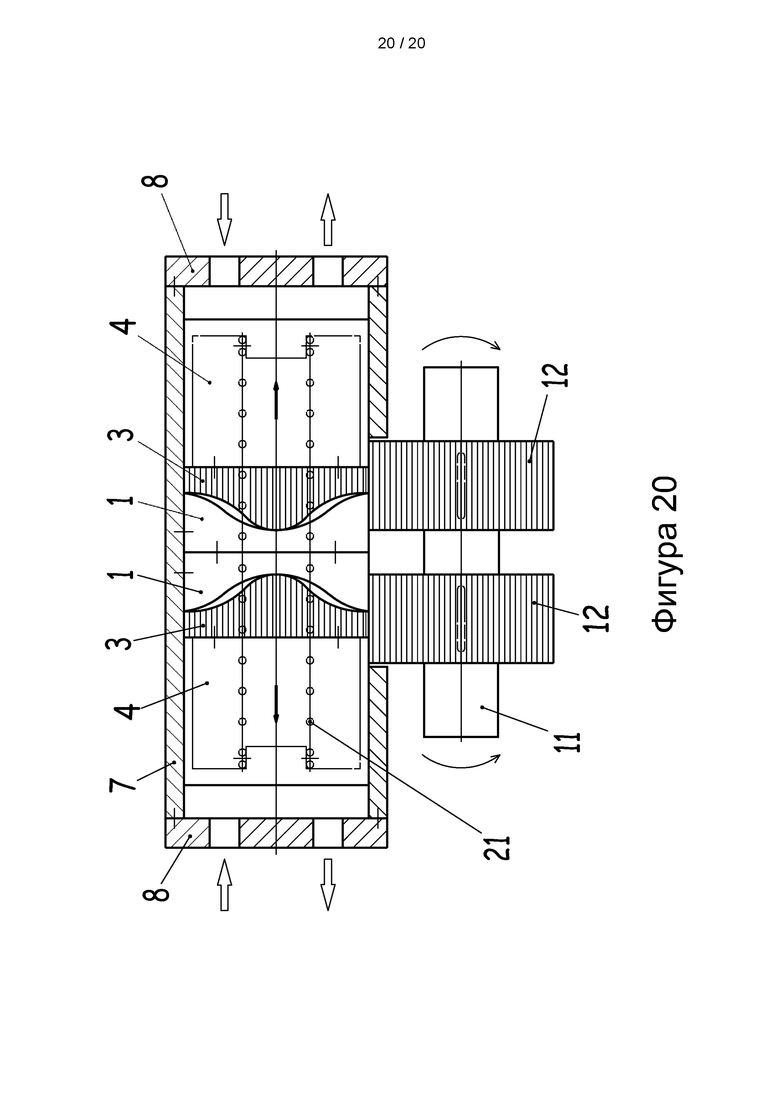
[0031] На ФИГ. 20 представлены машины, основанные на механизме для преобразования перемещения согласно настоящему изобретению, с двумя зеркально симметричными цилиндрами, парой волнистых поверхностей на цилиндр, а также механизм, принуждающий их контактировать, используя давление и помощь пружины.
[0032] На ФИГ. 1 показан механизм для преобразования перемещения согласно настоящему изобретению, содержащий первый кольцевой компонент 1 и второй кольцевой компонент 3, расположенные соосно рядом друг с другом вдоль продольной оси ΔA, причем указанные два компонента выполнены с возможностью вращения вокруг продольной оси ΔA и с возможностью возвратно-поступательного перемещения вдоль продольной оси ΔA. Сторона А первого кольцевого компонента 1, смежного со вторым кольцевым компонентом 3, находится в непрерывном контакте по меньшей мере в одной точке с соседней стороной Гα второго кольцевого компонента 3, так что второй кольцевой компонент 3 может перемещаться относительно первого кольцевого компонента 1, находясь в непрерывном контакте по меньшей мере в одной точке с соседней стороной А первого кольцевого компонента 1. Контактирующими сторонами являются гладкие волнистые поверхности A, Гα, выполненные в виде геометрического места радиусов, проходящих соответственно через волнистые кривые α и γα наружной цилиндрической поверхности первого и второго кольцевых компонентов 1, 3, начинающиеся от наружной поверхности указанных компонентов и завершающиеся на внутренней поверхности указанных компонентов, отличающиеся тем, что содержат n (натуральное число ≠0) повторяющихся пар геометрически подобных вершин и впадин с отношением 1:3 подобия, причем вершины/впадины являются симметричными относительно уровня, заданного верхней/нижней точкой вершины/впадины (соответственно) и продольной осью ΔA. Как показано на ФИГ. 1-4, n=2.
[0033] Если первый кольцевой компонент 1 и второй кольцевой компонент 3 принуждены совершать вращательное перемещение относительно друг друга с сохранением непрерывного контакта, каждая точка волнистых поверхностей A, Гα будет вычерчивать волнистую траекторию относительно другой поверхности и в то же время будет совершать возвратно-поступательное перемещение с частотой n раз (n - количество вершин/впадин), которая соответствует частоте вращательного перемещения, между ВМТ (верхней мертвой точкой) и НМТ (нижней мертвой точкой), причем указанное относительное перемещение выполняется каждым компонентом, прочно соединенным с одним из кольцевых компонентов 1 или 3; с другой стороны, каждый компонент, соединенный с одним из кольцевых компонентов 1 или 3 таким образом, что этот соединенный компонент может не следовать за вращением компонента, с которым он соединен, выполняет только возвратно-поступательное перемещение относительно другого кольцевого компонента, так что вращательное перемещение преобразуется в возвратно-поступательное перемещение компонента с одновременным вращением или без него; и в то же время, наоборот, принудительное относительное возвратно-поступательное перемещение одного кольцевого компонента 1 или 3 относительно другого кольцевого компонента преобразуется во вращательное перемещение этого компонента с одновременным возвратно-поступательным перемещением или без него.
[0034] Как показано на ФИГ. 1, вершины каждой волнистой поверхности A, Гα меньше, чем геометрически подобные впадины, с отношением подобия, составляющим 1:3, так что, когда вершины одной волнистой поверхности входят во впадины другой волнистой поверхности, и точки вершин входят в контакт с точками противоположной волнистой поверхности, имеется свободное пространство, оставленное между волнистыми поверхностями, в результате чего при смазке вследствие динамического смазывания достигается минимизация трения и износа.
[0035] На ФИГ. 2 показан механизм для преобразования перемещения согласно настоящему изобретению, отличающийся от механизма по ФИГ. 1 тем, что он содержит дополнительный механизм, поджимающий второй кольцевой компонент 3 к первому кольцевому компоненту 1 для обеспечения непрерывного контакта волнистой поверхности Гα с волнистой поверхностью A. Указанный дополнительный механизм содержит третий кольцевой компонент 2, установленный соосно с первым и вторым кольцевыми компонентами 1, 3, так что второй кольцевой компонент 3 расположен между первым и третьим кольцевыми компонентами 1, 2, причем смежная сторона третьего кольцевого компонента 2, обращенная ко второму кольцевому компоненту 3, является волнистой поверхностью B, которая отличается тем, что является такой же, что и волнистая кривая А первого кольцевого компонента 1, и тем, что является ее зеркальным отображением в пространстве и находится в непрерывном контакте по меньшей мере в одной точке со смежной с ней стороной второго кольцевого компонента 3, которая также является волнистой поверхностью Гβ, отличающейся тем, что она имеет ту же волнистую криволинейную форму, что и первый кольцевой компонент 1, смежный со стороной Гα второго кольцевого компонента 3, но расположена симметрично поверхности Гα и смещена в дальнюю сторону с вершинами, расположенными напротив впадин поверхности Гα, так что второй кольцевой компонент 3 может вращаться относительно первого и третьего кольцевых компонентов 1, 2 и находится в непрерывном контакте по меньшей мере в одной точке с одной стороной первого и одной стороной третьего кольцевых компонентов 1, 2.
[0036] В одном варианте реализации по ФИГ. 2 второй кольцевой компонент 3 соединен с поршнем 4 либо прочно, либо таким способом, что второй кольцевой компонент 3 и поршень 4 могут независимо вращаться вокруг продольной оси ΔA. Кроме того, показана цилиндрическая втулка 5 (в разобранном положении вдоль продолжения продольной оси ΔA), внутри которой перемещается, находясь в периферийном контакте, цилиндрический поршень 4, закрытый крышкой 8. В данном примере второй кольцевой компонент 3 действует в качестве ротора, в то время как первый и третий кольцевые компоненты 1, 2 действуют в качестве статоров.
[0037] Если поршень 4 является вогнутым и прочно соединен со вторым кольцевым компонентом 3, и в поверхности поршня 4 выполнено по меньшей мере одно отверстие О4, в случае вращательного перемещения второго кольцевого компонента 3 отверстие О4, вычерчивающее волнистую траекторию E, будет встречать по меньшей мере одно отверстие O5 неподвижной втулки 5, расположенное в траектории E или пересекающее траекторию E. Общие точки отверстий O4 и O5 обеспечивают периодическое сообщение между внутренней частью поршня 4 и наружной частью втулки 5 в течение периода времени сообщения отверстий поршня 4 и втулки 5. Таким образом, создан очень простой механизм клапанов, регулирующих поток текучей среды между внутренним пространством и внешней средой в цилиндре поршневой машины через вогнутый поршень 4 и втулку 5.
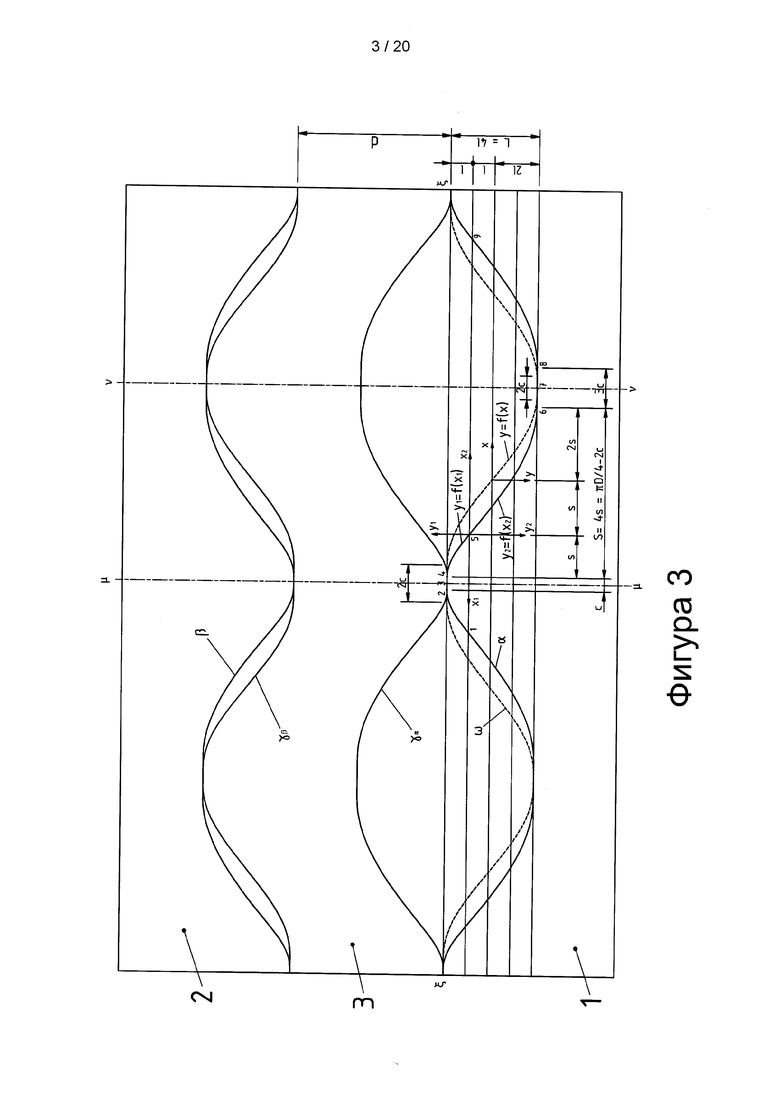
[0038] На ФИГ. 3 показаны развертки волнистых кривых α, γα/γβ и β наружных цилиндрических поверхностей первого, второго и третьего соответственно кольцевых компонентов 1, 3 и 2 по ФИГ. 2.
[0039] Из ФИГ. 3 ясно, что вершины волнистой поверхности первого кольцевого компонента 1 могут контактировать с вершинами волнистой поверхности второго кольцевого компонента 3, и что в этом местоположении обе волнистые поверхности A, Гα первого кольцевого компонента 1 и второго кольцевого компонента 3 являются симметричными относительно плоскости, соединяющей вместе точки их контакта, в то время как в этом местоположении вершины волнистой поверхности B третьего кольцевого компонента 2 находятся в контакте с впадинами противоположной волнистой поверхности Гβ второго кольцевого компонента 3, а вершины волнистой поверхности второго кольцевого компонента 3 находятся в контакте с впадинами противоположной волнистой поверхности третьего кольцевого компонента 2.
[0040] Из ФИГ. 3 ясно, что если ротор 3 вращается, каждая точка ротора 3 и поршень 4, который прочно соединен с ротором, перемещаются, вычерчивая замкнутую волнистую траекторию, развертка которой подобна кривой ω (с равными вершинами и впадинами, которые геометрически подобны вершинам и впадинам волнистых кривых α, γα/γβ и β с отношениями подобия, составляющими 2:1 и 2:3 соответственно), вычерчиваемой точкой 3 каждой вершины кривой γα ротора 3. Это перемещение в случае, если ротор 3 вращается с постоянной скоростью, рассматривается как плавное круговое перемещение с одной и той же частотой и возвратно-поступательное перемещение между ВМТ (верхней мертвой точкой) и НМТ (нижней мертвой точкой) с удвоенной (в целом с кратной n) частотой.
[0041] Согласно настоящему изобретению краями вершин и впадин являются точки или прямые участки, перпендикулярные продольной оси, как изображено на ФИГ. 3, причем если краями вершин и впадин являются точки, в случае относительного вращательного перемещения ротора 3 между двумя кольцевыми компонентами 1, 3 с постоянной скоростью результатом является простое и/или гармоническое возвратно-поступательное перемещение, тогда как если краями вершин и впадин являются прямые участки, в случае относительного вращательного перемещения ротора 3 между двумя кольцевыми компонентами 1, 3 с постоянной скоростью результатом является возвратно-поступательное перемещение с задержкой при смене направления перемещения на противоположное в ВМТ и НМТ.
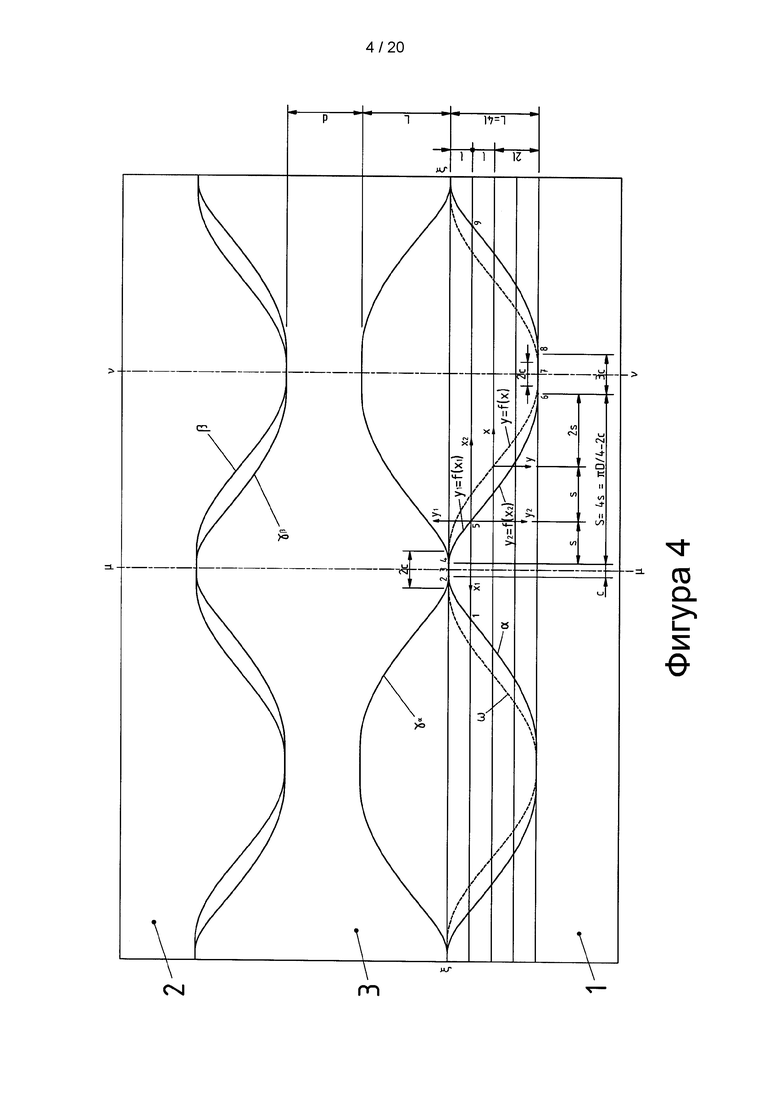
[0042] На ФИГ. 4 показаны развертки волнистых кривых α, γα/γβ и β наружных цилиндрических поверхностей первого, второго и третьего кольцевых компонентов 1, 3 и 2 соответственно по ФИГ. 2, единственное различие между которыми состоит в том, что третий кольцевой компонент 3 является симметричным относительно плоскости, перпендикулярной продольной оси ΔA. Как изображено на ФИГ. 3, кривые α и γα являются одинаковыми и находятся в том же относительном и абсолютном местоположении, как и кривые по ФИГ. 3; с другой стороны, кривые γβ и β являются одинаковыми и находятся в том же относительном местоположении, как и кривые по ФИГ. 3, однако в различном положении относительно кривых α и γα, вследствие чего указанные вершины и впадины второго кольцевого элемента 3 являются симметричными и расположены противоположно вершинам и впадинам соответственно. Также в данном конкретном случае второй кольцевой компонент 3 может вращаться относительно первого и третьего кольцевых компонентов 1, 2 с непрерывным контактом по меньшей мере в одной точке одной стороны первого и одной стороны третьего кольцевых компонентов 1, 2.
[0043] Как изображено на ФИГ. 3 и 4, для кривых α, γα и, если имеется дополнительный механизм, содержащий третий кольцевой компонент 2, для кривых β и γβ применяется следующее:
1. Это примерно одна и та же гладкая периодическая волнистая кривая в различных местоположениях с количеством n (натуральное число ≠0) повторяющихся пар геометрически подобных вершин 12345 и впадин 56789 с отношением 1:3 подобия (на ФИГ. 1, 2, 3 и 4: n=2).
2. Кривая γα симметрична с кривой α относительно оси ξ-ξ. На ФИГ. 3 кривая β получена в результате осевого смещения (на расстояние d) кривой γα, тогда как кривая γβ получена в результате осевого смещения (на расстояние L+d) и кругового смещения на угловое расстояние 90° (в целом на 360°/2n) кривой α. На ФИГ. 4 кривая β получена в результате осевого смещения (на расстояние L+d) и кругового смещения на угловое расстояние 90° (в целом на 360°/2n) кривой γα, тогда как кривая γβ получена в результате осевого смещения (на расстояние 2L+d) кривой α.
3. Каждая вершина 12345 симметрична относительно оси μ-μ, и каждая впадина 56789 симметрична относительно оси ν-ν. Вершины и впадины изображены в системах координат x1-y1 и x2-y2 с общим началом в точке 5 и противоположными осями, полученных из подобных уравнений y1=f(x1) и y2=f(x2) соответственно. Вершины занимают 1/4 полной высоты L волнистых кривых α, β, γα и γβ, и впадины занимают остальные 3/4 полной высоты L волнистых кривых α, β, γα и γβ.
4. Участки 234 и 678 могут быть прямыми, причем: 678≥234≥0.
5. Когда вершины одной кривой входят во впадины другой кривой, остается свободное пространство между их кривыми, т.е. размер вершин меньше, чем размер геометрически подобных впадин с отношением 1:3 подобия.
6. Если наружная поверхность ротора 3 перемещается в одном направлении, тогда как наружные поверхности статоров 2 и 3 остаются неподвижными, доказано, что кривые γα и γβ остаются в непрерывном контакте с кривыми α и β соответственно, вследствие чего для точки 3 (центра вершины) кривой γα, а также для каждой точки развертки наружной поверхности ротора 3 доказано, что они будут перемещаться, вычерчивая волнистую траекторию, подобную кривой ω (с равными вершинами и впадинами, которые геометрически подобны вершинам и впадинам волнистых кривых α, γα/γβ и β с отношениями 2:1 и 2:3 подобия соответственно), с прямыми участками в своих вершинах и впадинах или без них (ФИГ. 3 или 4), как описано ниже в абзаце 9. Кривая ω изображена в системе x-y координат с точкой в середине высоты L, являющейся началом указанной системы координат и находящейся на одинаковом расстоянии от осей μ-μ и ν-ν, из уравнения y=f(x), которое подобно уравнениям y1=f(x1) и y2=f(x2). Полная высота кривой ω равна полной высоте L волнистых кривых α, β, γα и γβ.
7. В связи с ФИГ. 3 и 4 в качестве примера приведены две характерных пары уравнений, описывающих части 45 и 56 кривой α соответственно:
a.  и
и  (синусоидальные),
(синусоидальные),
причем:  с
с  и
и  с
с  ;
;
b.  и
и  (полиноминальные),
(полиноминальные),
причем:  с и
с и  с .
с .
Координаты относятся к соответственно выбранным осям координат для каждого уравнения, как указано выше в параграфе 3.
8. В случае кривых, описанных в предыдущем абзаце, траектория ω, вычерчиваемая каждой точкой развертки наружной поверхности ротора 3 получена соответственно из уравнений:
a.  , причем:
, причем:  (синусоидальное).
(синусоидальное).
b. 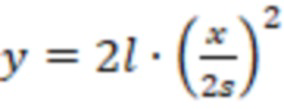 дважды, причем:
дважды, причем: 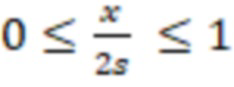 (полиноминальное).
(полиноминальное).
Координаты относятся к соответственно выбранным осям координат для каждого уравнения, как указано выше в параграфе 3.
9. Если участки 234 и 678 являются прямыми с расстоянием (точным) c и 3c соответственно между криволинейными участками траектории или криволинейного перемещения ω, описанными предыдущими уравнениями параграфа 8, одинаково вставленными являются равные участки длиной 2c, соответствующие равным временным интервалам задержки при смене направления перемещения на противоположное в ВМТ и НМТ. Различное отношение (коэффициент) длин участков 234 и 678 создает проблемы, такие как вставка неравных прямых участков, т.е. различные задержки при изменении направления перемещения на противоположное в ВМТ и НМТ, которые могут вызывать проблемы синхронизации в многоцилиндровых машинах. В целом, равные временные интервалы задержки при изменении направления перемещения на противоположное в ВМТ и НМТ приводят к случаю, когда края вершины являются прямыми участками длиной c, и края впадины являются прямыми участками длиной 3c соответственно.
[0044] ПРИМЕЧАНИЕ: Для достижения желательной гладкой периодической волнистой траектории или криволинейного перемещения ω (всех точек наружной поверхности ротора 3) с равными вершинами и впадинами волнистые кривые α, γα/γβ и β заданы таким образом, что указанные вершины и впадины подобны вершинам/впадинам кривой ω с отношениями 1:2 и 3:2 подобия соответственно. Затем, ротор 3 вращается и совершает плавное возвратно-поступательное перемещение скольжением с непрерывным контактом одновременно с обоими статорами 1 и 2, однако это не так в случае, если вершины кривой ω не равны своим впадинам, поскольку перемещение статора 3 блокировано.
[0045] ОПРЕДЕЛЕНИЕ: Считается, что геометрическая форма ∑2 подобна некоторой другой геометрической форме ∑1 (в общей системе координат) при том условии, что координаты геометрической формы ∑2 получены из соответствующих координат геометрической формы ∑1 их умножением на указанное отношение подобия. Отношение подобия может быть равно 1 или больше, или меньше; таким образом, может быть получено увеличение или сокращение геометрической формы ∑1, или равенство геометрической форме ∑1 соответственно.
[0046] На ФИГ. 5, 6 и 7 показаны случаи применения в поршневых машинах (двигателях или насосах/компрессорах), имеющих встроенный механизм для преобразования перемещения согласно настоящему изобретению, содержащий дополнительный механизм с третьим кольцевым компонентом 2 и массив клапанов согласно настоящему изобретению. Указанные машины содержат один или более цилиндров (в параллельном и/или противоположном расположении для нейтрализации сил инерции), причем второй кольцевой компонент 3, функционирующий в качестве ротора, прочно соединен с цилиндрическим поршнем 4, который одновременно совершает вращательное и возвратно-поступательное перемещения. Указанные машины содержат вспомогательные системы (смазки, охлаждения, подачи топлива, запуска и т.п.), известные в данной области техники.
[0047] Первый и третий кольцевые компоненты 1, 2 действуют в качестве статоров и прочно установлены в корпусе 7, тогда как ротор 3 вращается и совершает возвратно-поступательное перемещение в осевом направлении согласно настоящему изобретению с перемещением посредством шлица от оси 6, совпадающей с осью цилиндра поршневой машины по ФИГ. 5, или от оси 6 с перемещением через ось 11, расположенную снаружи цилиндра параллельно оси 6, как изображено на ФИГ. 7, причем указанное перемещение передается указанной оси через ось 11 посредством зубчатых колес 12, 15. Как изображено на ФИГ. 6, перемещение передается ротору осью 11 через зубчатое колесо 12 и зубчатую часть, выполненную в наружной поверхности 3 ротора. Длина зубчатой части зубчатого колеса 12 обеспечивает возможность непрерывного взаимодействия с зубчатой частью ротора 3, когда он совершает возвратно-поступательное перемещение во время вращения. Позицией 16 обозначена крышка корпуса 7.
[0048] Как изображено на ФИГ. 5, 6 и 7, указанный цилиндр дополнительно оснащен цилиндрической втулкой 5, внутри которой с периферийным контактом перемещается поршень 4, закрытый крышкой 8 цилиндра. Также включены поршневые кольца 9 и пружина 10 клапана.
[0049] В каждом клапане с отверстиями (одним отверстием во втулке и одним в поршне) типа согласно настоящему изобретению одно отверстие является круглым, а другое удлиненным для несжимаемой текучей среды. Кроме того, в случаях применения с поршневыми гидравлическими машинами или насосами/компрессорами и 2-тактными ДВС количество отверстий клапана (как всасывающих, так и нагнетательных) типа согласно настоящему изобретению равно удвоенному количеству n вершин/впадин, в то время как количество клапанов 4-тактных ДВС равно n.
[0050] На ФИГ. 8, 9 и 10 показаны случаи применения в поршневых машинах (двигателях или насосах/компрессорах) со встроенным механизмом для преобразования перемещения согласно настоящему изобретению, включающим дополнительный механизм с третьим кольцевым компонентом 2, причем второй кольцевой компонент 3, действующий в качестве ротора, прочно соединен с поршнем 4, вращающимся и одновременно совершающим возвратно-поступательное перемещение, в сочетании с известными/классическими клапанами 18. Указанные машины образованы одним или более цилиндрами (в параллельном и/или оппозитном расположении для нейтрализации сил инерции) с общей осью 11 и вспомогательными системами (смазки, охлаждения, подачи топлива, запуска и т.п.) уровня техники.
[0051] ФИГ. 8 отличается от ФИГ. 5 тем, что клапанное устройство согласно настоящему изобретению заменено известными/классическими клапанами 18. Отличительными элементами могут быть дискообразный кулачок 13, расположенный непосредственно над осью 6, и стержни 17, требующиеся в случае ДВС.
[0052] ФИГ. 9 отличается от ФИГ. 6 тем, что клапанное устройство согласно настоящему изобретению заменено известными/классическими клапанами 18. Отличительными элементами могут быть дискообразный кулачок 13, расположенный непосредственно над осью 11, и стержни 17, требующиеся в случае ДВС.
[0053] ФИГ. 10 отличается от ФИГ. 7 тем, что клапанное устройство согласно настоящему изобретению заменено известными/классическими клапанами 18, тогда как в случае ДВС обеспечены дискообразный кулачок 13, расположенный непосредственно над осью 11, и стержни 17.
[0054] ФИГ. 11, 12 и 13 отличаются от ФИГ. 8, 9 и 10 соответственно тем, что поршень 4 соединен с ротором 3 таким образом, что не следует за вращением ротора 3, вызывая вращение оси 6 или оси 11, а исполняет только возвратно-поступательное перемещение внутри втулки 5. Это достигнуто посредством линейно скользящих элементов 14 (клиньев, шариков и т.п.).
[0055] Поскольку поршень исполняет возвратно-поступательное перемещение только во втулке 5, описанный механизм может быть объединен только с известными/классическими клапанами 18 и в случае ДВС с дискообразным кулачком 13, расположенным непосредственно над осью 6 или 11, и стержнями 17.
[0056] На ФИГ. 14 показан еще один случай применения поршневой машины двойного действия (двигателя или насоса/компрессора) согласно настоящему изобретению, причем рабочая текучая среда действует между статорами 1 и 2, ротором 3 и цилиндрическим втулкой-корпусом 5/7. В частности, показана поршневая машина двойного действия с двумя цилиндрами, механизмом для преобразования перемещения, клапанами с отверстиями или традиционными клапанами, ротором 3, вращающимся на оси 6 со шлицем скольжения, причем функцию поршня выполняет ротор 3, в то время как рабочая текучая среда действует между указанными двумя статорами 1 и 2, ротором 3 и цилиндрическим втулкой-корпусом 5/7.
[0057] Как и на ФИГ. 5-13, машина может функционировать с простыми отверстиями в качестве клапанов в статоре 3 и втулке-корпусе 5/7 согласно настоящему изобретению, а также с известными/классическими клапанами различных типов, расположенными над втулкой-корпусом 5/7.
[0058] Для нейтрализации сил инерции необходимо объединить, как показано на ФИГ. 14, два противонаправленных статора 3 с соответствующими статорами 1 и 2 в одной и той же втулке-корпусе 5/7 или объединить больше цилиндров по желанию, как показано на ФИГ. 15. В настоящей заявке особенно интересными являются случаи 2-тактных ДВС, гидравлических двигателей и насосов/компрессоров.
[0059] Машины, представленные на ФИГ. 5-14, выполняют в каждом своем обороте множество возвратно-поступательных перемещений, количество которых соответствует количеству n вершин/впадин, имеющихся в каждой волнистой поверхности статоров 1, 2 и ротора 3. Случай, в котором n=1, является нечастым ввиду возникновения асимметричных внутренних сил, вызывающих силы трения между поршнем 4 и втулкой 5 и относительный износ. Обычно n=2, так что в 4-тактных ДВС, реализующих настоящее изобретение, каждый рабочий цикл завершается в одном обороте по сравнению с двумя оборотами в известных ДВС. Результатом является удвоение (приблизительное) мощности для машин с цилиндрами одинакового объема. Это оказывает противоположное действие - в сочетании с отсутствием поршневого штока и классического кулачкового вала - на размер/вес машины: они уменьшаются (примерно) на 50% при той же выходной мощности. Изложенное выше применяется и обобщается соответственно для n>2.
[0060] Это справедливо также и для 2-тактных ДВС, причем, опять же, мощность удваивается, или размер/вес уменьшается наполовину по сравнению с известными 2-тактными машинами с цилиндрами одинакового объема или одинаковой мощностью соответственно.
[0061] Наконец, во всех ДВС, в которых используется настоящее изобретение и дискообразный кулачок, обеспечено полное управление рабочим ходом, синхронизацией и длительностью активации известных/классических клапанов вследствие того факта, что нет никаких ограничений в выборе положения и конфигурировании формы и размера кулачков.
[0062] На ФИГ. 15, показаны конфигурации, основанные на случаях применения, соответствующих ФИГ. 5-14, в которых достигается абсолютная нейтрализация сил инерции, возникающих из возвратно-поступательного перемещения масс ротора 3 и поршня 4, без балансировки: стрелки указывают относительное перемещение в различных цилиндрах. Всякий раз, когда это выполнимо, сгорание последовательно осуществляется в различных цилиндрах и происходит одинаково при каждом обороте оси 11 по причинам сглаживания потока мощности.
[0063] В частности, на ФИГ. 15 представлены следующие интересные случаи:
a. 2 цилиндра размещены в противонаправленном расположении с камерами для рабочей текучей среды в концах и отбором мощности от параллельной оси с двумя позициями вывода. Данное конкретное расположение представляет собой простой блок автономной работы (simple unit of autonomous operation, SUAO) с полностью уравновешенными силами инерции возвратно-поступательного перемещения.
b. 2 цилиндра размещены в противонаправленном расположении с камерами для рабочей текучей среды, объединенными или не объединенными в центре, и отбором мощности от параллельной оси с двумя позициями вывода. В двигателях ДВС случай с объединенными камерами является менее предпочтительным по сравнению со случаем с раздельными камерами по той причине, что происходит половина сгораний, что приводит к большим флуктуациям кривой потока мощности. Это расположение представляет собой другой вариант реализации простого блока автономной работы (SUAO).
c. 4-цилиндровая или многоцилиндровая машина, образованная из блоков случая по ФИГ. 15.a для более гладкой работы и/или большей мощности с одиночным выходом.
d. 4-цилиндровая или многоцилиндровая машина, образованная из блоков случая по ФИГ. 15.b для более гладкой работы и/или большей мощности с одиночным выходом.
e. 4 цилиндра, расположенные параллельно на одном уровне с двумя выводами отбора мощности, представляющими продолжение осей 6.
f. 4 цилиндра, расположенные параллельно на одном уровне, с параллельным отбором мощности в центре с двумя концами.
g. 4 цилиндра, расположенные параллельно по кругу (через каждые 90°), с параллельным отбором мощности в центре с двумя концами.
h. 4 цилиндра, расположенные параллельно по кругу (перекрестно), с параллельным отбором мощности в центре с двумя концами.
[0064] Кроме того, для случаев применения по ФИГ. 5-14 справедливы следующие примечания:
1. Рабочая текучая среда действует внутри втулки 5 между свободной поверхностью поршня 4 и крышкой 8.
2. На ФИГ. 5, 7, 8, 10, 11, 13 и 14 ось 6 совпадает с осью цилиндра.
3. На ФИГ. 6, 9 и 12 ось 11 размещена снаружи цилиндра параллельно его оси. Перемещение передается от оси 11 ротору 3 через зубчатое колесо 12 и зубчатую часть на наружной поверхности ротора 3. Также применимо обратное. Длина зубчатой части зубчатого колеса 12 обеспечивает возможность непрерывного взаимодействия с зубчатой частью ротора 3, когда он совершает возвратно-поступательное перемещение с одновременным вращением.
4. На ФИГ. 8 и 11 используются известные клапаны 18, дискообразный кулачок 13 расположен на оси 6.
5. На ФИГ. 9, 10, 12 и 13 также используются известные клапаны 18, дискообразный кулачок 13 расположен на оси 11, и на диске он несет только один набор кулачков. Эти случаи рекомендованы для многоцилиндровых машин при условии, что цилиндры расположены параллельно на равном расстоянии (по окружности) вокруг одиночной оси 11 (см. ФИГ. 15g и 15h).
6. На ФИГ. 7, 10 и 13 ось 11 приводится во вращение осью 6 через пару зубчатых колес 12 и 15. Также применимо обратное.
7. На ФИГ. 8-13 в случаях применения в поршневых гидравлических двигателях или насосах/компрессорах подходящие известные/классические клапаны используются согласно конкретной конфигурации. Клапаны, поршневые штоки и диск коленчатого вала (относящиеся к двигателям ДВС) исключены.
8. На ФИГ. 5, 6, 7 и 14 в случаях применения в поршневых гидравлических двигателях или насосах в каждой паре клапанов с отверстиями (типа согласно настоящему изобретению) одно является круглым, а другое удлиненным для несжимаемой текучей среды.
9. На ФИГ. 5, 6, 7 и 14 в случаях применения в поршневых гидравлических двигателях или насосах/компрессорах и 2-тактных двигателях ДВС количество отверстий клапана (типа согласно настоящему изобретению) равно удвоенному количеству клапанов 4-тактных ДВС.
10. На ФИГ. 5, 7, 8, 10, 11, 13 и 14 вращение и одновременное возвратно-поступательное перемещение ротора 3 достигаются с использованием шлица над осью 6, в то время как на ФИГ. 6, 9 и 12 это достигается посредством зубчатого колеса 12 и наружной зубчатой части на роторе 3.
[0065] В случаях, описанных посредством изображений на ФИГ. 5-14, преобразование вращения в возвратно-поступательное перемещение и наоборот осуществляется благодаря скольжению поверхностей Гα и Гβ второго кольцевого компонента 3, который также может функционировать в качестве ротора, вдоль поверхностей A и B соответственно первого и третьего кольцевых компонентов 1 и 3, которые могут функционировать в качестве статоров, как показано на ФИГ. 2, 3 и 4. Тот же результат также имеет место в случае, когда поверхности Гβ и B устранены, и второй кольцевой компонент 3 поджат к первому кольцевому компоненту 1 для непрерывного контакта поверхности Гα с поверхностью A. Это может быть достигнуто, например, следующими способами замещения третьего кольцевого компонента 2:
1. Использование пружины (пружин), прикладывающих давление к ротору 3, в сочетании с подшипниками, за исключением особых случаев (как в случае по ФИГ. 20).
2. Посредством двух диаметрально противоположных роликов, установленных на роторе 3, выполненных с возможностью качения по подходящей волнистой поверхности, образованной на статоре 2, подобной поверхности B (на ФИГ. 2), с обеспечением возможности для осей роликов вычерчивать кривую ω по ФИГ. 3 или 4.
3. Использование давления (гидравлического или пневматического) на ротор 3.
4. Использование действия магнитных/электромагнитных сил на ротор 3.
5. Использование силы тяжести (только для машин с вертикальными цилиндрами).
[0066] Наконец, настоящее изобретение относится ко всем видам машин и автоматических устройств, в которых имеет место преобразование вращения в возвратно-поступательное перемещение или обратно, в таких как механические прессы, гвоздильные машины, швейные машины, печатные машины и т.п.
[0067] На ФИГ. 16.a показано устройство муфты сцепления, содержащее первый кольцевой компонент 1, соединенный с осью 6 посредством шлица, обеспечивающего скольжение в осевом направлении, и компонент (вспомогательную ось) 4, прочно соединенный со вторым кольцевым компонентом 3, в то же время специальный механизм уровня техники может прикладывать осевую силу F к первому кольцевому компоненту 1 и принуждать его вершины к вхождению во впадины второго кольцевого компонента 3. В этом состоянии вращение оси 6 полностью передается вспомогательной оси 4. Если осевая сила F, действующая на первый кольцевой компонент 1, будет устранена, он отодвинется и выйдет из зацепления с вторым кольцевым компонентом 3, и в этом случае передача вращения от оси 6 к вспомогательной оси 4 будет прекращена.
[0068] На ФИГ. 16.b показано более эффективное устройство муфты сцепления, в котором ось 6 соединена посредством шлица скольжения с ротором 3, т.е. со вторым кольцевым компонентом, статор 2, т.е. третий кольцевой компонент, прочно соединен с компонентом (вспомогательной осью) 4, с другой стороны, в этом начальном положении/состоянии ротор 3 одновременно перемещается скольжением и свободно перемещается между статорами 1 и 2, не нарушая их кинематического состояния. Кроме того, специальный механизм уровня техники может прикладывать осевую силу F к статору 1, принуждая первый и третий кольцевые компоненты 1 и 2 к сближению друг с другом в достаточной степени. В этом новом состоянии ротор 3 блокирован между статорами 1 и 2; таким образом, вращение оси 6 полностью передается вспомогательной оси 4. Если осевая сила F, действующая на статор 1, устранена специальным механизмом, статор 1 переместится к своему начальному положению/состоянию, ротор 3 будет освобожден и снова начнет перемещаться скольжением между статорами 1 и 2, и передача вращения от оси 6 к вспомогательной оси 4 будет прекращена.
[0069] При необходимости статоры 1 и 2 снаружи соединены с втулкой 7: первый соединен клиньями 14, обеспечивающими скольжение в осевом направлении, и третий выполнен с возможностью вращения только в незначительной степени.
[0070] Указанный специальный механизм, прикладывающий силу F, широко применяется в современном уровне техники, он может быть в некоторой степени эквивалентен механизмам, встречающимся в муфтах сцепления транспортных средств всех видов (автомобилей, грузовиков, тягачей и т.п.), и он может действовать механически и/или гидравлически, и/или пневматически и т.п.
[0071] Признак/преимущество такой муфты сцепления состоит в простой и компактной конструкции, но в основном в передаче перемещения посредством механического взаимодействия, не фрикционного, что приводит к почти полному отсутствию износа за счет отсутствия трения во время скользящего действия взаимодействующих частей благодаря их гидродинамическому смазыванию.
[0072] На ФИГ. 17.a показано устройство для дифференциала, содержащее две зеркально симметричных секции, каждая из которых состоит из первого кольцевого компонента 1 и второго кольцевого компонента 3, соединенного с осью 6 посредством шлица скольжения. Специальный механизм уровня техники прикладывает силу F к первому кольцевому компоненту 1 и удерживает его во взаимодействии со вторым кольцевым компонентом 3. Каждый из двух кольцевых компонентов 3 прочно соединен с зубчатым колесом 15, получающим перемещение от оси 11 через взаимодействующее зубчатое колесо 12. При условии, что сопротивление двух осей 6 во время перемещения является одинаковым, первые кольцевые компоненты 1 остаются в зацеплении со вторыми кольцевыми компонентами 3, и вращение зубчатого колеса 15 полностью передается осям 6. Если сопротивление в одной из осей 6 растет, соответствующий первый кольцевой компонент 1 отходит, и количество оборотов соответствующей оси 6 уменьшается, в то время как другая ось 6 продолжает вращаться обычным образом до момента времени, когда равновесие сопротивлений осей 6 будет восстановлено, и прежняя работа устройства возобновится. Другими словами, устройство функционирует в качестве простого дифференциала. Для избежания неблагоприятного эффекта остановки одной оси 6 и вращения только другой оси в случае, если сопротивление этой оси равно нулю, необходимо, чтобы управление силами F и вращением осей 6 осуществлялось посредством электронного помощника. В этом случае обе оси могут быть полностью блокированы и будут вращаться с одной скоростью: дифференциал с ограниченным проскальзыванием "LSD" (limited slip differential, LSD).
[0073] На ФИГ. 17.b показано более эффективное устройство для дифференциала в виде сочетания конфигураций, представленных на ФИГ. 16.b и 17.a, объединенные описания которых раскрывают режим работы дифференциала этого конкретного типа. Устройство для дифференциала содержит две зеркально симметричных секции, каждая из которых состоит из второго кольцевого компонента 3, действующего в качестве ротора, соединенного с осью 6 посредством шлица скольжения, первого кольцевого компонента 1 и третьего кольцевого компонента 2. В этом начальном положении/состоянии ротор 3 свободно перемещается скольжением между статорами 1 и 2, не влияя на их кинематическое состояние. Специальный механизм согласно уровня техники прикладывает силу F к первому кольцевому компоненту 1, перемещая его в направлении к третьему кольцевому компоненту 2, захватывая и блокируя второй кольцевой компонент 3 между первым и третьим компонентами 1 и 2, так что третий кольцевой компонент 2 жестко взаимодействует с осью 6 и одновременно передает перемещение оси 6. Две зеркально симметричных секции прочно соединены посредством третьих кольцевых компонентов 2 с зубчатым колесом 15, получая перемещение от одной оси 11 через взаимодействующее зубчатое колесо 12. Работа устройства в качестве дифференциала определена захватом и блокированием или не блокированием второго кольцевого компонента 3. Таким образом, пока сопротивление двух осей 6 во время передачи перемещения является одинаковым, вторые кольцевые компоненты 3 остаются во взаимодействии с третьими кольцевыми компонентами 2, и вращение зубчатого колеса 15 полностью передается к осям 6; с другой стороны, если увеличивается сопротивление на одной из осей 6, то соответствующий первый кольцевой компонент 1 немного отодвигается, соответствующий второй кольцевой компонент 3 освобождается и начинает одновременно свободно перемещаться скольжением между первым и третьими кольцевыми компонентами 1 и 2, так что количество оборотов соответствующей оси 6 уменьшается до момента восстановления равновесия сопротивлений осей 6, и устройство возвращается назад к своему начальному положению/рабочему режиму.
[0074] При необходимости первый кольцевой компонент 1 соединен с корпусом 7 путем использования осевого скользящего элемента 14, и третий кольцевой компонент 2 соединен с корпусом 7, выполненным с возможностью незначительного периферийного скольжения.
[0075] Специальный механизм, прикладывающий силу F, так же, как и в случаях применения устройства дифференциала на ФИГ. 16.a и 16.b, может действовать механически и/или гидравлически, и/или пневматически и т.п., с электронным помощником или без него.
[0076] Признак/преимущество такого дифференциала состоит в простой и компактной конструкции, но в основном, в передаче перемещения путем механического взаимодействия без трения, что приводит почти к полному отсутствию износа вследствие отсутствия трения во время скользящего действия взаимодействующих частей, благодаря их гидродинамическому смазыванию, а также способности работать в качестве дифференциала с ограниченным проскальзыванием "LSD".
[0077] На ФИГ. 18.a показан первый механизм для преобразования вращательного перемещения в возвратно-поступательное перемещение или наоборот согласно настоящему изобретению, с количеством вершин и впадин n=n1, причем первый и третий кольцевые компоненты 1 и 2 действуют в качестве статоров и прочно установлены в корпусе 7, тогда как второй кольцевой компонент 3 перемещается осью 6 посредством шлица скольжения и действует в качестве ротора, прочно соединенного с поршнем 4, вращающимся и совершающим возвратно-поступательное перемещение в осевом направлении, коаксиально соединенным посредством штифта 19 со вторым подобным механизмом с той же траекторией L возвратно-поступательного перемещения и количеством вершин и впадин, составляющим n=n2≠n1, посредством поршней 4, способом, обеспечивающим возможность вращения относительно друг друга, однако без осевого смещения. В этом случае, если ось 6 первого механизма совершает N1 оборотов, ось 6 второго механизма совершает N2=N1x(n1/n2) оборотов, т.е. указанная пара механизмов действуют в качестве устройства для увеличения/уменьшения скорости вращения.
[0078] На ФИГ. 18.b соответственно оси 6 указанных двух механизмов соосно соединены посредством клиньев 14 соединителя 20 фиксированным способом, так что пара механизмов функционирует в качестве устройства для увеличения/уменьшения скорости возвратно-поступательного перемещения. В последнем случае указанная пара механизмов также может функционировать и/или в качестве устройства для увеличения/уменьшения длины L траектории возвратно-поступательного перемещения при том условии, что длина L1 траектории возвратно-поступательного перемещения первого механизма отличается от длины L2 траектории возвратно-поступательного перемещения второго механизма.
[0079] Признак/преимущество такого устройства для увеличения/уменьшения состоит в последовательном (соосном) расположении, а также в способности, в добавление к увеличению/уменьшению количества оборотов, также достигать увеличения/уменьшения количества возвратно-поступательных перемещений с изменением или без изменения длины траектории.
[0080] На ФИГ. 19 показано соединение электрической машины (электрогенератора/электродвигателя) с двумя подобными машинами М (двигателями или насосами/компрессорами соответственно), подобное соединениям, описанным в случаях применения, представленных на ФИГ. 5, 8 и 11, согласно настоящему изобретению. Корпуса машин М установлены соосно с корпусом (статором) электрической машины E: один справа и другой слева. Ось ротора электрической машины E устранена, и ее заменяют оси 6 машин М, выполненные с возможностью синхронизации друг с другом, в результате чего поршни перемещаются в противоположных направлениях с целью уравновешивания сил инерции возвратно-поступательного перемещения. Соединение этого типа соответствует показанному на ФИГ. 15.a, однако оно предлагает преимущество над ним, состоящее в том, что параллельная ось отсутствует, замененная ротором электрической машины.
[0081] Признак/преимущество такой электромеханической пары состоит в простоте, в частности, малом размере/весе, высокой концентрации мощности и компактности (плотной компоновке) конструкции по сравнению с другими известными случаями.
[0082] На ФИГ. 5-14 описанные машины согласно настоящему изобретению могут функционировать в качестве 2-тактных бензиновых двигателей с чистым топливом (без добавления смазки). Требуются: впрыскивание топлива с распылением, подача воздуха с использованием компрессора (турбонаддув), конструкция, обеспечивающая возможность задержки изменения направления перемещения на противоположное в ВМТ и НМТ согласно настоящему изобретению, и клапаны с отверстиями согласно настоящему изобретению или управляемые дискообразным кулачком и отрегулированные (также обеспеченная настоящим изобретением возможность) для работы в следующем порядке: как только завершается фаза расширения и непосредственно перед тем, как поршень достигает НМТ, открывается выпускной клапан, и большая часть выхлопных газов выходит, затем открывается впускной клапан, и входящий воздух под давлением вытесняет остальную часть выхлопных газов (очистка/продувка), выпускной клапан закрывается, что сопровождается закрытием впускного клапана после заполнения цилиндра воздухом, и начинается изменение направления перемещения на противоположное по направлению к ВМТ. Затем наступает фаза сжатия, впрыск, воспламенение и сгорание топлива и, наконец, расширение, и новый идентичный цикл начинается снова.
[0083] Признак/преимущество такого 2-тактного бензинового двигателя состоит в его небольшом размере/весе, составляющем примерно половину размера/веса известного 2-тактного бензинового двигателя с такой же выходной мощностью, а также в работе без загрязнения окружающей среды, т.е. выброс выхлопных газов сопоставим по качеству с выбросом 4-тактного бензинового двигателя, в отличие от загрязняющих выхлопных газов известных 2-тактных бензиновых двигателей.
[0084] Описанная машина также может работать тем же образом в качестве дизельного двигателя.
[0085] В обоих случаях (бензинового или дизельного двигателя) размер/вес такого двигателя составляет примерно одну четверть размера/веса соответствующего известного 4-тактного двигателя.
[0086] На ФИГ. 20 показан случай применения механизма в двухцилиндровой поршневой машине, соответствующий случаю, показанному на ФИГ. 15.a, в котором цилиндры являются соосными, установлены в зеркальной конфигурации, с двумя компонентами 4, перемещающимися в противоположных направлениях и функционирующими в качестве поршней, для уравновешивания сил инерции возвратно-поступательного перемещения, и отличаются тем, что каждый цилиндр работает с парой кольцевых компонентов с волнистыми поверхностями, преобразующими перемещение на их смежных сторонах, согласно настоящему изобретению, и их непрерывный контакт обеспечивает силу, непрерывно прикладываемую к поршню, когда он перемещается от ВМТ к НМТ и обратно.
[0087] В частности, как изображено на ФИГ. 20, каждый цилиндр содержит первый кольцевой компонент 1, функционирующий в качестве статора, второй кольцевой компонент 3, функционирующий в качестве ротора, прочно соединенного с поршнем 4. Статоры 1 прочно соединены друг с другом и с общим корпусом 7. Каждый ротор 3 несет на себе наружное зубчатое колесо, взаимодействующее с зубчатым колесом 12 установленным на общей оси 11, параллельной продольной оси цилиндров. Зубчатые колеса 12 осуществляют синхронизацию роторов 3 и передают перемещение оси 11. Сила прикладывается к поршням 4, когда они перемещаются между ВМТ и НМТ, что осуществляется за счет давления рабочей текучей среды и/или с помощью пружины 21 растяжения, удерживающей волнистые поверхности роторов 3 в контакте с соответствующими статорами 1. Пружина 21 растяжения соединяет поршни (4) друг с другом через отверстия в статорах 1, таким образом, она способствует возврату поршней, удерживая роторы 3 в непрерывном контакте с соответствующими статорами 1, что является особенно важным в период времени, когда машина не работает, в результате чего предотвращено ее рассогласование. Каждый цилиндр содержит клапаны согласно настоящему изобретению или известные/классические клапаны 18 в сочетании с дискообразными кулачками 13 и стержнями 17. Такими машинами являются 2-тактные ДВС, гидравлические и пневматические двигатели, в которых сила, действующая на поршень, создается давлением рабочей текучей среды. Насосы/компрессоры также относятся к подобному случаю, причем сила, действующая на поршень в фазе всасывания, прикладывается исключительно пружиной 21 натяжения; что касается остальных элементов, они применяются как изложено для случая двигателей.
[0088] Признак/преимущество такой машины состоит в ее простоте, в частности, небольшом размере/весе, высокой концентрации мощности и компактности конструкции по сравнению с другими известными случаями.
[0089] Преимущества механизмов согласно настоящему изобретению по сравнению с недостатками уже известных механизмов, а также преимущества их реализации в поршневых машинах (двигателях или насосах/компрессорах) и в автоматических устройствах следующие:
1. Исключительно простая конструкция и очень малое количество компонентов, требующееся для их реализации.
2. Минимальное количество перемещающихся компонентов: только ось 11 или ось 6, ротор 3 и поршень 4.
3. Возможность осуществления клапанного устройства с простыми отверстиями без вспомогательных компонентов и/или механизмов.
4. Возможность объединения с известными клапанами 18 и кулачками (в ДВС) в дискообразном кулачке 13 на оси 6 или оси 11. Кулачки могут быть выполнены в подходящих конфигурациях таким образом, что могут с большей эффективностью открывать и закрывать клапаны в заданные моменты времени.
5. Возможность достижения абсолютно гармонического возвратно-поступательного перемещения без гармоник более высокого порядка.
6. Возвратно-поступательное перемещение поршня 4 может быть реализовано различными способами и описано простыми математическими уравнениями. Типичными случаями являются синусоидальное и полиномиальное уравнения.
7. Возможность задержки изменения направления перемещения поршня на противоположное в ВМТ и НМТ для лучшего сгорания и улучшенной эффективности.
8. Возможность полной нейтрализации сил инерции возвратно-поступательного перемещения без балансировки, только надлежащим расположением цилиндра.
9. Фактическое отсутствие трения и износа между поршнем 4 и втулкой 5 благодаря полному отсутствию поперечных сил между ними.
10. В точках контакта волнистых скользящих поверхностей A, B и Гα/Гβ статоров 1, 2 и ротора 3 приложена дольная сила (половина является максимумом для n=2) по сравнению с силой, приложенной в точке контакта поршневого пальца с поршневым штоком известной машины.
11. Минимизация трения и износа скользящих волнистых поверхностей A, B и Гα/Гβ статоров 1, 2 и ротора 3 соответственно из-за динамического смазывания, разработанного благодаря благоприятной геометрии.
12. Возможность изготовления в соответствии с технологией, защищающей окружающую среду от загрязнения, 2-тактных ДВС с размером/весом/стоимостью, составляющими примерно 50% размера/веса/стоимости известных 2-тактных двигателей ДВС или 25% размера/веса/стоимости известных 4-тактных двигателей ДВС.
13. Компактная конструкция многоцилиндровых машин: возможность расположения цилиндров в линию с одной осью (ФИГ. 15.f) или двумя противонаправленными осями (ФИГ. 15.e), или крестообразно и перекрестно с центральной осью (ФИГ. 15.g и h соответственно).
14. Уменьшение примерно на 50% размера и/или объема при одной и той же выходной мощности и, следовательно, удвоение концентрации мощности. Также применимо обратное.
15. Уменьшение примерно на 50% стоимости благодаря соответствующему уменьшению размера и/или объема при одной и той же выходной мощности.
ОБОЗНАЧЕНИЯ НА ЧЕРТЕЖАХ
1. Первый кольцевой компонент, статор.
2. Третий кольцевой компонент, статор.
3. Второй кольцевой компонент, ротор.
4. Поршень или вспомогательная ось муфты сцепления.
5. Втулка.
6. Ось со шлицем скольжения.
7. Корпус.
8. Крышка цилиндра.
9. Поршневые кольца.
10. Пружина клапана (отверстие).
11. Ось (общая).
12. Зубчатое колесо оси.
13. Кулачковый диск.
14. Скользящий элемента (клин).
15. Зубчатое колесо оси.
16. Крышка корпуса.
17. Шток клапана.
18. Известный/классический клапан.
19. Соединительный штифт.
20. Соединитель.
21. Пружина растяжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ УРАВНОВЕШИВАНИЯ ПОРШНЕВОЙ МАШИНЫ | 1990 |
|
RU2011061C1 |
| МЕХАНИЗМ КОРОТКОЙ ПЕРЕДАЧИ ХОДА ПОРШНЕВОГО ЗВЕНА | 2009 |
|
RU2453747C2 |
| УСТРОЙСТВО ДЛЯ УРАВНОВЕШИВАНИЯ ПОРШНЕВОЙ МАШИНЫ | 1992 |
|
RU2019757C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ | 2016 |
|
RU2613012C1 |
| ТРЕХЗВЕННЫЙ РОТОРНО-КУЛАЧКОВЫЙ МЕХАНИЗМ | 1989 |
|
RU2035651C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1989 |
|
RU2044903C1 |
| ИНЕРЦИОННЫЕ ДВИГАТЕЛЬ КОМБИНИРОВАННЫЙ, ЭЛЕКТРОДВИГАТЕЛЬ И ПРЕОБРАЗОВАТЕЛЬ | 1998 |
|
RU2156870C2 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ ДЛЯ ПОРШНЕВОЙ МАШИНЫ | 2019 |
|
RU2709336C1 |
| УСТРОЙСТВО ДЛЯ УРАВНОВЕШИВАНИЯ ПОРШНЕВОЙ МАШИНЫ | 1992 |
|
RU2018039C1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ ДЛЯ ПОРШНЕВОЙ МАШИНЫ | 2017 |
|
RU2658209C1 |
Изобретение сможет быть использовано в механизмах для преобразования вращения в возвратно-поступательное перемещение или наоборот. Механизм для преобразования вращения в возвратно-поступательное перемещение или наоборот содержит первый кольцевой компонент (1) и второй кольцевой компонент (3), расположенные соосно рядом друг с другом вдоль продольной оси (ΔA). Оба компонента выполнены с возможностью вращения вокруг продольной оси и с возможностью возвратно-поступательного перемещения вдоль продольной оси. Сторона (A) первого кольцевого компонента (1), смежная со вторым кольцевым компонентом (3), находится в непрерывном контакте по меньшей мере в одной точке с соседней стороной (Гα) второго кольцевого компонента (3), так что для второго кольцевого компонента (3) обеспечена возможность перемещаться соосно относительно первого кольцевого компонента (1), находясь в непрерывном контакте по меньшей мере в одной точке со смежной стороной (A) первого кольцевого компонента (1). Контактирующими сторонами являются гладкие волнистые поверхности (A), (Гα), образованные в виде геометрического места радиусов, проходящих соответственно через гладкие волнистые кривые (α), (γα) наружной цилиндрической поверхности первого и второго кольцевых компонентов (1), (3), начинающиеся от их наружной поверхности и отличающиеся числом n, где n натуральное число ≠0, повторяющихся пар геометрически подобных вершин и впадин с отношением 1:3 подобия. Вершины волнистой поверхности первого кольцевого компонента (1) выполнены с возможностью контакта с вершинами волнистой поверхности второго кольцевого компонента (3). Раскрыты особенности выполнения волнистых поверхностей механизма и особенности взаимодействия между собой первого и второго кольцевых компонентов (1), (3). Раскрыты применение механизма для преобразования вращения в возвратно-поступательное перемещение или наоборот для устройства для увеличения/уменьшения количества возвратно-поступательных перемещений для цилиндра поршневой машины, в устройстве муфты сцепления, в устройстве для дифференциала, для устройства для увеличения/уменьшения числа оборотов, для устройства для увеличения/уменьшения количества возвратно-поступательных перемещений, для соединения электрической машины с двумя одинаковыми машинами с цилиндрами, в двухцилиндровой машине, в цилиндре поршневой машины, в двухцилиндровой поршневой машине двойного действия. Технический результат заключается в упрощении конструкции и снижении количества компонентов в устройстве. 10 н. и 7 з.п. ф-лы, 30 ил.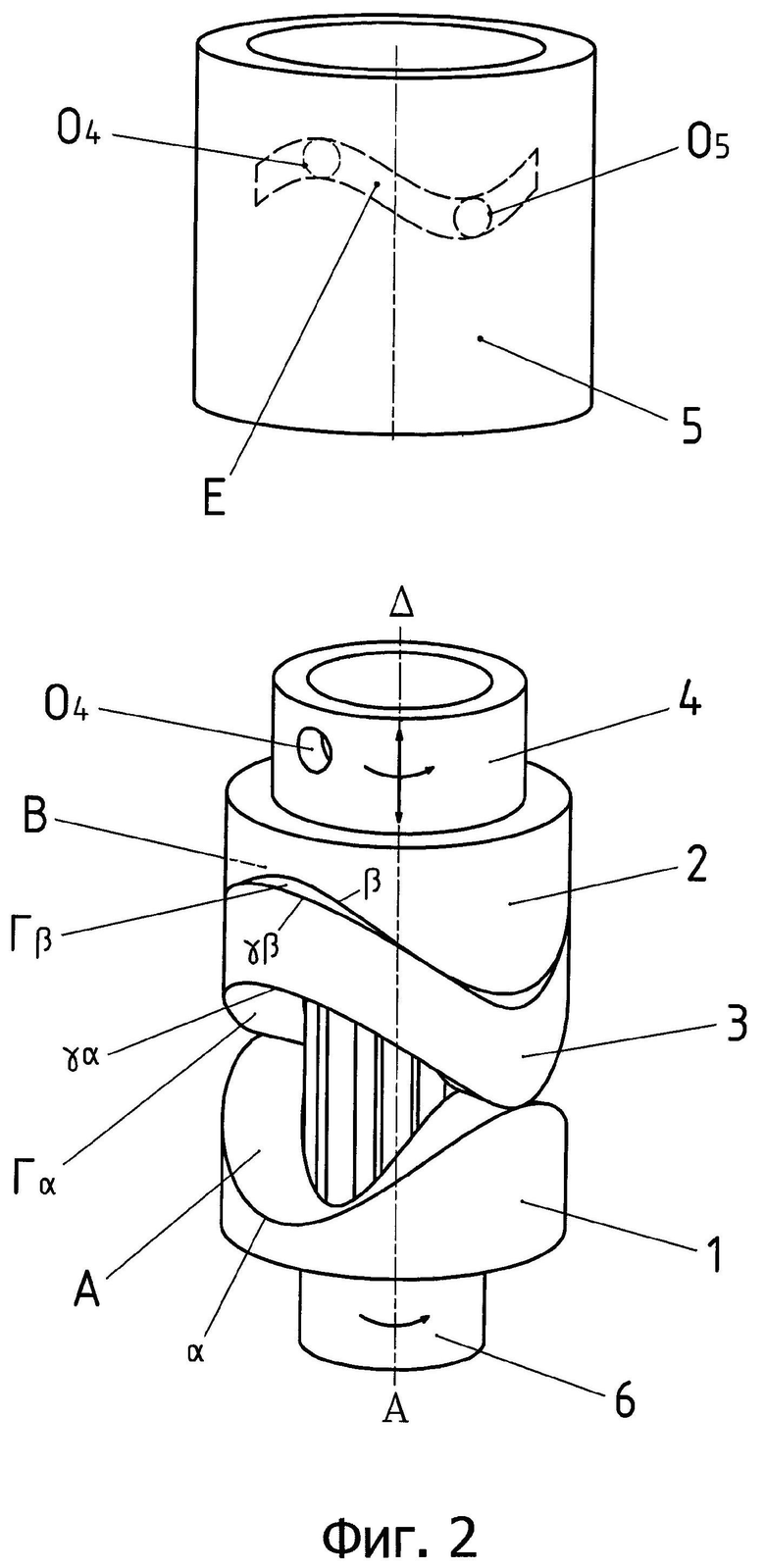
1. Механизм для преобразования вращения в возвратно-поступательное перемещение или наоборот, отличающийся тем, что он
содержит первый кольцевой компонент (1) и второй кольцевой компонент (3), расположенные соосно рядом друг с другом вдоль продольной оси (ΔА), причем оба компонента выполнены с возможностью вращения вокруг продольной оси и с возможностью возвратно-поступательного перемещения вдоль продольной оси,
при этом сторона (А) первого кольцевого компонента (1), смежная со вторым кольцевым компонентом (3), находится в непрерывном контакте по меньшей мере в одной точке с соседней стороной (Гα) второго кольцевого компонента (3), так что для второго кольцевого компонента (3) обеспечена возможность перемещаться соосно относительно первого кольцевого компонента (1), находясь в непрерывном контакте по меньшей мере в одной точке со смежной стороной (А) первого кольцевого компонента (1),
причем контактирующими сторонами являются гладкие волнистые поверхности (А, Гα), образованные в виде геометрического места радиусов, проходящих соответственно через гладкие волнистые кривые (α, γα) наружной цилиндрической поверхности первого и второго кольцевых компонентов (1, 3), начинающиеся от их наружной поверхности и отличающиеся числом n (натуральное число ≠0) повторяющихся пар геометрически подобных вершин и впадин с отношением 1:3 подобия, причем отношение подобия задано как отношение координат двух подобных геометрических форм в общей системе координат, при этом первая геометрическая форма подобна второй геометрической форме в общей системе координат при условии, что координаты первой геометрической формы получены из соответствующих координат второй геометрической формы их умножением на отношение подобия, причем вершины/впадины являются симметричными относительно уровня, заданного самой верхней/самой нижней точкой вершины/впадины соответственно и продольной осью,
при этом вершины волнистой поверхности первого кольцевого компонента (1) выполнены с возможностью контакта с вершинами волнистой поверхности второго кольцевого компонента (3), причем в этом положении точки контакта расположены на плоскости, перпендикулярной продольной оси, относительно которой волнистые поверхности (А, Гα) первого кольцевого компонента (1) и второго кольцевого компонента (3) являются симметричными,
причем вершины каждой волнистой поверхности (А, Гα) меньше, чем геометрически подобные впадины, с отношением 1:3 подобия, так что, когда они входят во впадины и края вершин входят в контакт с самой нижней точкой противоположной волнистой поверхности, имеется свободное пространство, оставшееся между волнистыми поверхностями, в результате чего при смазке вследствие динамического смазывания достигается минимизация трения и износа,
так что, когда первый кольцевой компонент (1) и второй кольцевой компонент (3) принуждены совершать вращательное перемещение относительно друг друга, оставаясь в то же время в непрерывном контакте, каждая точка волнистых поверхностей (А, Гα) вычерчивает волнистую траекторию относительно другой поверхности и в то же время совершает относительно другой поверхности возвратно-поступательное перемещение с частотой n раз, причем n является количеством вершин/впадин, соответствующей частоте вращательного перемещения, между ВМТ (верхней мертвой точкой) и НМТ (нижней мертвой точкой), при этом указанное относительное перемещение выполняется каждым компонентом, прочно соединенным с одним из кольцевых компонентов (1, 3), в то время как каждый компонент соединен с одним из кольцевых компонентов (1, 3) таким образом, что этот соединенный компонент выполнен с возможностью не следовать за вращением компонента, с которым он соединен, выполняет только возвратно-поступательное перемещение относительно другого кольцевого компонента, так что вращательное перемещение преобразуется в возвратно-поступательное перемещение компонента с одновременным вращением или без одновременного вращения, и в то же время, наоборот, принудительное относительное возвратно-поступательное перемещение одного кольцевого компонента (1, 3) относительно другого кольцевого компонента преобразуется во вращательное перемещение этого компонента с одновременным возвратно-поступательным перемещением или без него,
причем края вершин и впадин на плоской развертке волнистых кривых наружных поверхностей первого и второго кольцевых компонентов являются точками или прямыми участками, вертикальными относительно продольной оси, при этом, когда края вершин и впадин являются точками, в случае относительного вращательного перемещения между двумя кольцевыми компонентами (1, 3) с постоянной скоростью результатом является простое и/или гармоническое возвратно-поступательное перемещение, с другой стороны, когда края вершин и впадин являются прямыми участками, в случае относительного вращательного перемещения между двумя кольцевыми элементами (1, 3) с постоянной скоростью результатом является возвратно-поступательное перемещение с задержкой при смене направления перемещения на противоположное в ВМТ и НМТ, при этом, когда края вершин являются прямыми участками длиной с и края впадин являются прямыми участками длиной 3с соответственно, результатом являются равные временные интервалы задержки при изменении направления перемещения на противоположное в ВМТ и НМТ.
2. Механизм по п. 1, отличающийся тем, что второй кольцевой компонент (3) соединен с цилиндрическим компонентом (4) либо прочно, либо таким способом, что второй кольцевой компонент (3) и цилиндрический компонент (4) имеют свободу вращаться вокруг продольной оси или остаются неподвижными независимо один от другого.
3. Механизм по п. 2, отличающийся цилиндрической втулкой (5), внутри которой обеспечена возможность перемещения - с периферийным контактом - цилиндрического поршня (4), закрытого крышкой (8).
4. Механизм по п. 3, отличающийся тем, что цилиндрическим компонентом является вогнутый поршень (4), прочно соединенный со вторым кольцевым компонентом (3), и тем, что в поверхности поршня (4) имеется по меньшей мере одно отверстие (O4), которое при вычерчивании волнистой траектории (Е) встречает по меньшей мере одно отверстие (О5) во втулке (5), расположенное на траектории (Е) или пересекающее траекторию (Е), обеспечивая периодическое сообщение между внутренней частью поршня (4) и наружной частью втулки (5), пока отверстия поршня (4) и втулки (5) совместно используют общие точки, образуя клапанное устройство, управляющее потоком текучей среды между внутренним пространством цилиндра поршневой машины и наружной средой через вогнутый поршень (4) и втулку (5).
5. Механизм по пп. 1, 2, 3 или 4, отличающийся дополнительным механизмом, поджимающим второй кольцевой компонент (3) к первому кольцевому компоненту (1) для обеспечения непрерывного контакта волнистой поверхности (Гα) второго кольцевого компонента (3) с волнистой поверхностью (А) первого кольцевого компонента (1).
6. Механизм по п. 5, отличающийся тем, что дополнительный механизм содержит третий кольцевой компонент (2), соосно установленный относительно первого и второго кольцевых компонентов (1, 3), так что второй кольцевой компонент (3) расположен между первым и третьим кольцевыми компонентами (1, 2), причем его смежная сторона, обращенная ко второму кольцевому компоненту (3), является волнистой поверхностью (В), отличающейся тем, что является такой же, как и волнистая поверхность первого кольцевого компонента (1), и тем, что является ее зеркальным отображением в пространстве и находится в непрерывном контакте по меньшей мере в одной точке со смежной с ней стороной второго кольцевого компонента (3), которая также является волнистой поверхностью (Гβ), отличающейся тем, что имеет такую же волнистую поверхность, как и сторона (Гα) второго кольцевого компонента (3), смежного с первым кольцевым компонентом (1), однако расположена симметрично поверхности (Гα) и смещена в дальнюю сторону с вершинами, расположенными противоположно впадинам поверхности (Гα), так что второй кольцевой компонент (3) выполнен с возможностью перемещения относительно первого и третьего кольцевых компонентов (1, 2) и находится в непрерывном контакте по меньшей мере в одной точке с одной стороной первого и одной стороной третьего кольцевых компонентов (1, 2),
причем вершины волнистой поверхности первого кольцевого компонента (1) выполнены с возможностью контакта с вершинами волнистой поверхности второго кольцевого компонента (3), и в этом местоположении обе волнистые поверхности (А, Гα) первого кольцевого компонента (1) и второго кольцевого компонента (3) являются симметричными относительно плоскости, соединяющей вместе точки их контакта, в то время как в этом местоположении вершины волнистой поверхности (В) третьего кольцевого компонента (2) находятся в контакте с впадинами противоположной волнистой поверхности (Гβ) второго кольцевого компонента (3), а вершины волнистой поверхности второго кольцевого компонента (3) находятся в контакте с впадинами противоположной волнистой поверхности третьего кольцевого компонента (2), в результате геометрически подобных вершин и впадин с отношением 1:3 подобия без блокировки перемещения второго кольцевого компонента (3) между первым кольцевым компонентом (1) и третьим кольцевым компонентом (2).
7. Механизм по п. 5, отличающийся тем, что дополнительный механизм содержит третий кольцевой компонент (2), соосно установленный относительно первого и второго кольцевых компонентов (1, 3), так что второй кольцевой компонент (3) расположен между первым и третьим кольцевыми компонентами (1, 2), причем его смежная сторона, обращенная ко второму кольцевому компоненту (3), является волнистой поверхностью (В), отличающейся тем, что является такой же, что и волнистая поверхность первого кольцевого компонента (1), являющейся зеркально симметричной поверхности (А) и смещенной в дальнюю сторону, так что ее вершины расположены напротив впадин поверхности (А), и находится в непрерывном контакте по меньшей мере в одной точке со смежной с ней стороной второго кольцевого компонента (3), которая также является волнистой поверхностью (Гβ), отличающейся тем, что имеет такую же волнистую поверхность, как и поверхность смежной с первым кольцевым компонентом (1) стороны (Гα) второго кольцевого компонента (3), однако является зеркально симметричной в пространстве относительно нее, так что второй кольцевой компонент (3) выполнен с возможностью перемещения относительно первого и третьего кольцевых компонентов (1, 2) и находится в непрерывном контакте по меньшей мере в одной точке с одной стороной первого и одной стороной третьего кольцевых компонентов (1, 2),
при этом вершины волнистой поверхности первого кольцевого компонента (1) выполнены с возможностью контакта с вершинами волнистой поверхности второго кольцевого компонента (3), причем в этом местоположении обе волнистые поверхности (А, Гα) первого кольцевого компонента (1) и второго кольцевого компонента (3) являются симметричными относительно плоскости, соединяющей вместе точки их контакта, в то время как в этом местоположении вершины волнистой поверхности (В) третьего кольцевого компонента (2) находятся в контакте с впадинами противоположной волнистой поверхности (Гβ) второго кольцевого компонента (3), и вершины волнистой поверхности второго кольцевого компонента (3) находятся в контакте с впадинами противоположной волнистой поверхности третьего кольцевого компонента (2), в результате геометрически подобных вершин и впадин с отношением 1:3 подобия без блокировки перемещения второго кольцевого компонента (3) между первым кольцевым компонентом (1) и третьим кольцевым компонентом (2).
8. Применение механизма по п. 6 или 7 для преобразования вращения в возвратно-поступательное перемещение или наоборот для цилиндра поршневой машины, в котором первый и третий кольцевые компоненты (1, 2) выполнены с возможностью работы в качестве статоров и прочно установлены в корпусе (7), тогда как второй кольцевой компонент (3) функционирует в качестве ротора, либо прочно соединенного с поршнем (4), вращающимся и совершающим возвратно-поступательное перемещение в осевом направлении, либо соединенного с возможностью вращения с поршнем (4), совершающим только возвратно-поступательное перемещение в осевом направлении, с перемещением посредством шлица от оси (6), совпадающей с осью цилиндра поршневой машины, или с перемещением от оси (6) через ось (11), установленную с наружной стороны цилиндра параллельно его оси, причем перемещение передается оси (6) от оси (11) посредством зубчатых колес (12, 15) или осью (11) через зубчатое колесо (12) и зубчатую часть на наружной поверхности ротора (3), при этом обеспечены клапаны с отверстиями или известные клапаны (18) и, в случае ДВС, известные клапаны (18) в сочетании с дискообразным кулачком (13) и стержнями (17).
9. Применение по п. 8 для цилиндра поршневой машины, работающей в качестве 2-тактного бензинового двигателя с чистым топливом без добавления смазки, причем требуются впрыск топлива, подача воздуха компрессором или турбонаддувом, равные временные интервалы задержки при изменении направления перемещения на противоположное в ВМТ и НМТ и клапаны с отверстиями или управляемые дискообразным кулачком (13) и стержнями (17), при этом клапаны работают в следующем порядке: как только завершена фаза расширения и непосредственно перед тем, как поршень достиг НМТ, открывается выпускной клапан, и большая часть выхлопных газов выходит, затем открывается впускной клапан, и входящий воздух под давлением вытесняет остальную часть выхлопных газов, выпускной клапан закрывается, что сопровождается закрытием впускного клапана после заполнения цилиндра воздухом, и начинается изменение направления перемещения на противоположное по направлению к ВМТ, сопровождаемое фазой сжатия, впрыском, воспламенением и сгоранием топлива и, наконец, расширением, после чего тот же цикл начинается снова.
10. Применение механизма по п. 6 или 7 для преобразования вращения в возвратно-поступательное перемещение или наоборот в устройстве муфты сцепления, в котором ось (6) соединена посредством шлица скольжения со вторым кольцевым компонентом (3), функционирующим в качестве ротора, причем третий кольцевой компонент (2) прочно соединен с компонентом (4), при этом механизм выполнен с возможностью приложения осевой силы (F) к первому кольцевому компоненту (1), принуждая первый и третий кольцевые компоненты (1, 2) сближаться друг с другом в достаточной степени, причем в этой ситуации второй кольцевой компонент (3) блокирован между первым и третьим кольцевыми компонентами (1, 2), вследствие чего вращение оси (6) полностью передается компоненту (4), с другой стороны, когда осевая сила (F), действующая на первый кольцевой компонент (1), устранена указанным механизмом, он смещается к своему начальному положению, вследствие чего второй кольцевой компонент (3) освобожден и снова начинает перемещаться скольжением между первым и третьим кольцевыми компонентами (1, 2), и, таким образом, передача вращения от оси (6) к элементу (4) прервана, при этом первый и третий кольцевые компоненты при необходимости соединены с наружной втулкой (7), т.е. первый кольцевой компонент соединен посредством клиньев (14), обеспечивающих скольжение в осевом направлении, и третий кольцевой компонент соединен с возможностью вращения только в незначительной степени.
11. Применение механизма по п. 6 или 7 для преобразования вращения в возвратно-поступательное перемещение или наоборот в устройстве для дифференциала, содержащем две зеркально симметричных секции, каждая из которых состоит из второго кольцевого компонента (3), функционирующего в качестве ротора, соединенного с осью (6) посредством шлица скольжения, первого кольцевого компонента (1), третьего кольцевого компонента (2), механизма, прикладывающего необходимую силу (F) к первому кольцевому компоненту (1) для его сближения в достаточной степени с третьим кольцевым компонентом (2) с захватом и блокированием второго кольцевого компонента (3) между первым и третьим кольцевыми компонентами (1, 2), так что третий кольцевой компонент (2) взаимодействует с осью (6) и одновременно передает перемещение оси (6), причем каждый из двух кольцевых компонентов (2) прочно соединен с зубчатым колесом (15), получающим перемещение от оси (11) через взаимодействующее зубчатое колесо (12), так что пока сопротивление двух осей (6) во время передачи перемещения является одинаковым, вторые кольцевые компоненты (3) остаются во взаимодействии с третьими кольцевыми компонентами (2), и вращение зубчатого колеса (15) полностью передается осям (6), с другой стороны, когда сопротивление на одной из осей (6) возрастает, соответствующий первый кольцевой компонент (1) немного отодвигается, соответствующий второй кольцевой компонент (3) освобождается и начинает перемещаться скольжением между первым и третьим кольцевыми компонентами (1, 2), вследствие чего число оборотов соответствующей оси (6) уменьшается до момента, когда восстанавливается равновесие сопротивлений осей (6), и число оборотов уравнивается, при этом каждый первый кольцевой компонент (1) при необходимости соединен с корпусом (7) путем использования осевого скользящего элемента (14) и каждый третий кольцевой компонент (2) соединен с корпусом (7) и выполнен с возможностью незначительного скольжения по окружности.
12. Применение механизма по п. 6 или 7 для преобразования вращения в возвратно-поступательное перемещение или наоборот для устройства для увеличения/уменьшения числа оборотов, причем механизм для преобразования вращения в возвратно-поступательное перемещение или наоборот с количеством вершин/впадин n=n1, в котором первый и третий кольцевые компоненты (1, 2) функционируют в качестве статоров и прочно установлены в корпусе (7), тогда как второй кольцевой компонент (3) функционирует в качестве ротора, прочно соединенного с поршнем (4), вращающегося и совершающего возвратно-поступательное перемещение в осевом направлении, с перемещением от оси (6) посредством шлица скольжения, соединен соосно с другим подобным механизмом с той же траекторией (L) возвратно-поступательного перемещения и количеством вершин и впадин, составляющим n=n2≠n1, посредством поршней (4) и соединительного штифта (19) способом, обеспечивающим возможность вращения относительно друг друга, однако без осевого смещения, причем, когда ось (6) первого механизма совершает N1 оборотов, ось (6) второго механизма совершает N2=N1x(n1/n2) оборотов, т.е. указанная пара механизмов функционирует в качестве устройства для увеличения/уменьшения скорости вращения.
13. Применение механизма по п. 6 или 7 для преобразования вращения в возвратно-поступательное перемещение или наоборот для устройства для увеличения/уменьшения количества возвратно-поступательных перемещений, причем механизм для преобразования вращения в возвратно-поступательное перемещение или наоборот с количеством n=n1 вершин/впадин, в котором первый и третий кольцевые компоненты (1, 2) функционируют в качестве статоров и прочно установлены в корпусе (7), тогда как второй кольцевой компонент (3) функционирует в качестве ротора, прочно соединенного с поршнем (4), вращающегося и совершающего возвратно-поступательное перемещение в осевом направлении, с перемещением от оси (6) посредством шлица скольжения, прочно соединен соосно посредством оси (6) и соединителя (20) посредством клиньев (14) с другим подобным механизмом с количеством вершин/впадин, составляющим n=n2≠n1, вследствие чего указанная пара механизмов функционирует в качестве устройства для увеличения/уменьшения скорости возвратно-поступательного перемещения и/или длины траектории возвратно-поступательного перемещения в случае, когда траектория (L1) возвратно-поступательного перемещения одного механизма отличается от траектории (L2) возвратно-поступательного перемещения другого механизма.
14. Применение механизма по п. 6 или 7 для преобразования вращения в возвратно-поступательное перемещение или наоборот для соединения электрической машины (Е) с двумя одинаковыми машинами (М) с цилиндрами, оси (6) которых совпадают с осями их цилиндров, причем корпусы машин (М) установлены соосно на корпусе или статоре электрической машины (Е): один справа и другой слева, при этом ось ротора электрической машины (Е) устранена и заменена осями (6) указанных двух машин (М), и при этом они синхронизированы друг с другом, в результате чего поршни работают, перемещаясь в противоположных направлениях, для уравновешивания сил инерции возвратно-поступательного перемещения.
15. Применение механизма по пп. 1, 2, 3 или 5 для преобразования вращения в возвратно-поступательное перемещение или наоборот в двухцилиндровой машине, отличающейся тем, что каждый цилиндр работает с парой кольцевых компонентов с волнистыми поверхностями, преобразующими перемещение на своих смежных сторонах, причем цилиндры являются соосными и установлены в зеркальном расположении с компонентами, перемещающимися в противоположных направлениях и функционирующими в качестве поршней (4) для уравновешивания сил инерции возвратно-поступательного перемещения, при этом каждый цилиндр содержит первый кольцевой элемент (1), функционирующий в качестве статора, и второй кольцевой компонент (3), функционирующий в качестве ротора, прочно соединенного с поршнем (4), причем статоры (1) прочно соединены друг с другом и общим корпусом (7), при этом каждый ротор (3) имеет наружную зубчатую или заглубленную часть, взаимодействующую с одним зубчатым колесом (12) из пары зубчатых колес, установленных на общей оси (11), параллельной продольной оси цилиндров, причем пара зубчатых колес (12) синхронизирует роторы (3) и передает перемещение оси (11), вследствие чего к поршням (4) приложена сила, когда они перемещаются между ВМТ и НМТ, что происходит благодаря давлению рабочей текучей среды и/или с помощью пружины (21) растяжения, таким образом удерживающая волнистые поверхности роторов (3) в контакте с соответствующими статорами (1), при этом пружина (21) растяжения соединяет поршни (4) друг с другом через отверстия в статорах (1) и способствует их возвращению, удерживая роторы (3) в непрерывном контакте с соответствующими статорами (1), что является особенно важным в период времени, когда машина не работает, таким образом предотвращая ее рассогласование, причем каждый цилиндр содержит клапаны с отверстиями или известные клапаны (18), а в случае ДВС содержит известные клапаны (18) в сочетании с дискообразным кулачком (13) и стержнями (17).
16. Применение механизма по п. 6 или 7 для преобразования вращения в возвратно-поступательное перемещение или наоборот в цилиндре поршневой машины, отличающейся тем, что цилиндр содержит первый и третий кольцевые компоненты (1, 2), функционирующие в качестве статоров, и второй кольцевой компонент (3), функционирующий в качестве ротора, причем статоры (1, 2) прочно соединены с общим корпусом, при этом ротор (3) выполняет функцию поршня, а рабочая текучая среда протекает между статорами (1, 2), ротором (3) и общим корпусом, причем обеспечены клапаны с отверстиями в роторе (3) и общем корпусе или известные клапаны (18) на общем корпусе, и в случае ДВС обеспечены известные клапаны (18) в сочетании с дискообразным кулачком (13) и стержнями (17), расположенные также на общем корпусе.
17. Применение механизма по п. 6 или 7 для преобразования вращения в возвратно-поступательное перемещение или наоборот в двухцилиндровой поршневой машине двойного действия, отличающейся тем, что цилиндры являются соосными и установлены в зеркальном расположении с компонентами, перемещающимися в противоположных направлениях для уравновешивания сил инерции возвратно-поступательного перемещения, причем каждый цилиндр содержит первый и третий кольцевые компоненты (1,2), функционирующие в качестве статоров, и второй кольцевой компонент (3), функционирующий в качестве ротора, с перемещением посредством шлица от общей оси (6), совпадающей с осью цилиндра поршневой машины, при этом статоры (1,2) прочно соединены с общим корпусом (5/7) и, кроме того, статоры (2) соединены друг с другом, причем ротор (3) выполняет функцию поршня, и рабочая текучая среда протекает между статорами (1, 2), ротором (3) и цилиндрической втулкой-корпусом (5/7), причем обеспечены клапаны с отверстиями в роторе (3) и втулке-корпусе (5/7) или известные клапаны (18) на втулке-корпусе (5/7), и в случае ДВС обеспечены известные клапаны (18) в сочетании с дискообразным кулачком (13) и стержнями (17), расположенные также на втулке-корпусе (5/7).
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Установка для физико-механических исследований образцов материалов | 1989 |
|
SU1635059A1 |
| БЕСШАТУННЫЙ ОППОЗИТНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2482301C1 |
| Сцепная муфта | 1932 |
|
SU34466A1 |
| Дифференциал транспортного средства | 1991 |
|
SU1772009A1 |
| DE 2902025 B1, 03.07.1980 | |||
| US 7438027 B1, 21.10.2008. | |||

