Область техники, к которой относится изобретение
Изобретение относится к области движителей транспортных средств различных видов (наземных, водных, воздушных).
Уровень техники
Наиболее близким техническим решением, принятым за прототип, является инерционный движитель для транспортного средства по патенту Российской Федерации RU 2066398 Черепанова А.А. с датой начала действия патента: 1993.08.17; дата публикации 31.10.2006 г.
Этот движитель состоит из четверых пар рабочих элементов, каждый из которых выполнен в виде неподвижно установленного опорного кольца и подвижного эксцентрика - диска с прорезью вдоль радиуса, размещенного внутри опорного кольца с возможностью возвратно-поступательного перемещения в плоскости, перпендикулярной оси вращения. В каждой паре рабочие элементы установлены с одинаковой фазой возвратно-поступательного перемещения эксцентриков-дисков и выполнены с возможностью перемещения в противоположных направлениях. Последние в каждой паре рабочих элементов относительно другой пары установлены с разностью в фазе возвратно-поступательного их движения, равной 90 градусов. Диаметр опорного кольца равен трем радиусам эксцентрика-диска, а ось вращения пересекает диаметр опорного кольца таким образом, что делит этот диаметр в отношении 1:2. Конструкция движителя состоит из двух блоков со своими осями вращения в противоположном направлении. Опорные кольца жестко связаны вместе. Для синхронного вращения осей в противоположные стороны оси вращения соединены друг с другом кинематически с помощью зубчатой передачи, состоящей из четырех шестерней, устанавливаемых между парами элементов «эксцентрик-диск-опорное кольцо». Двигатель соединяется через этот редуктор с осями вращения эксцентриков-дисков движителя, приводя их в движение.
Причины, препятствующие получению технического результата, предсказанного в указанном патенте, приведены В.М.Петровым в статьях: «Центробежный движитель ЦДП-41» (http://www.petrovlam.ru/v_stat.php?id=56&tabl=zentrob), «Комментарии к изобретению А.А.Черепанова «Инерционный движитель для транспортного средства»» (http://www.petrovlam.ni/v_stat.php?id=12&tabl=comment). По его мнению основными причинами следует считать: «…вращающееся тело просто не долетит до стенки корпуса и по этой причине НЕ сможет передать ему свою центробежную силу… Для передачи центробежной силы корпусу груз должен быть НЕ условно «приклеенным» к корпусу, а ЖЕСТКО с ним связанным. Для движителей с саморазгонными грузами это невозможно!» К этим причинам нужно добавить то, что автор патента совершенно не учитывал влияние кориолисовых сил, а также то, что при установке двигателя, вращающего диски, устройство будет вращаться в обратном направлении, изменяя (по кругу) направление вектора тягового усилия.
Раскрытие изобретения
Сущность предлагаемого изобретения, неизвестного из уровня техники, заключается в установке на обоих концах двигателей, вращающихся встречно, втулок, соединенных с шестернями на дальних концах от двигателей, образующих с двух сторон устройства (движителя) редукторы, синхронизирующие вращение двигателей, втулок, по которым вдоль их диаметров устанавливаются под равными углами стержни с эксцентриками, имеющие возможность совершать вращательные вместе со втулками и возвратно-поступательные движения вдоль их диаметров, движущиеся по траекториям, определяемым профилем установленных и жестко соединенных между собой одинаковых и одинаково установленных отражателей в количестве, равном числу стержней. Установка двух двигателей, вращающихся встречно, вместо одного в прототипе, приводит к исключению вращения устройства вокруг оси двигателя, а также к совпадению центра масс устройства с его геометрическим центром. Установка стержней (с эксцентриками) взамен «эксцентриков-дисков» в прототипе обеспечивает принудительное движение их по траекториям, задаваемым профилями отражателей, количество которых не ограничено, в отличие от единственного профиля отражателя (опорного кольца) в прототипе, представляющего из себя окружность диаметром, равным трем радиусам эксцентрика-диска, а ось вращения пересекает диаметр опорного кольца таким образом, что делит этот диаметр в отношении 1:2.
Стержни во втулках размещаются под разными углами, менее 90 [град], в отличие от прототипа, в котором из каждой пары «рабочих элементов» установлены два эксцентрика-диска, перемещающихся возвратно-поступательно по прямолинейным траекториям, сдвинутым относительно друг друга на 90 [град].
Установка нескольких стержней, больше двух, в каждой втулке увеличивает значение тягового усилия и снижает пульсацию вибрации по сравнению с прототипом.
В отличие от прототипа профиль отражателя (в предлагаемом движителе) определяет не только значение тягового значения (вместе с количеством стержней во втулке), но и его направление в зависимости от значений центробежной и кориолисовой сил.
Задача, не решение которой направлено заявляемое изобретение, - создание механического движителя (МД).
Решение этой задачи обеспечивает следующие технические результаты:
- реализация МД с высоким значение тягового усилия, направленного в зависимости от профиля отражателей в прямом или обратном направлении (в положительном или отрицательном направлении оси ординат, проходящей перпендикулярно в поверхности, на которой устанавливаются двигатели), и низким значением пульсации (вибраций);
- создание на базе МД транспортных средств взамен колесных и гусеничных, способных перемещаться: по пересеченной местности с повышенным КПД из-за отсутствия потерь на трение о земную поверхность; по воде без нарушения ее экологии винтами; под водой на больших глубинах в связи с сокращением числа отверстий в прочном корпусе; воздушной среде.
Перечисленные технические результаты, говорящие о промышленной применимости изобретения, получаются благодаря следующей совокупности существенных признаков предлагаемого изобретения:
- на обоих концах двигателей устанавливаются втулки с прижимными крышками;
- на дальних от двигателей концах втулок устанавливаются втулочные муфты, через которые втулки соединяются с шестернями, входящими в состав редукторов, а на ближних к двигателям концах - стояковые подшипники;
- с двух сторон устройства устанавливаются редукторы, синхронизирующие встречное вращение двигателей;
- через отверстия на втулках, расположенных на концах диаметров последних, проходят стержни с равными эксцентриками с двух сторон;
- через каждую втулку проходит несколько стержней (больше двух) вдоль диаметров, разделяющих круглое сечение втулки на равные сектора;
- концы стержней движутся по внутренним поверхностям жестко связанных между собой и одинаково установленных отражателей, профиль которых выбирается из множества геометрических кривых (не обязательно окружность) и определяет направление тягового усилия движителя.
Получаемые технические результаты и приведенная выше совокупность существенных признаков предлагаемого изобретения подтверждают его изобретательский уровень.
Краткое описание чертежей
На фиг. 1 представлена схема блока основных элементов МД. В него входят: стержень 1, с двумя равными грузами (эксцентриками) 2, 3 и штоком 4, вращающимся на валу 5 двигателя 8, на котором установлена втулка 6, через которую стержень 1 совершает при вращении возвратно-поступательное движение (или µ стержней, устанавливаемых на равных расстояниях друг от друга под углом 







На фиг. 2 показан МД с несколькими стержнями (с 4-мя) в составе основных элементов. Обозначения 1-9 соответствуют принятым выше на фиг. 1. В его состав входят: два двигателя 8, четыре втулки 6, через каждую из которых проходят четыре стержня 1; четыре втулочных муфты (втулки соединительные) 10; восемь прижимных крышек 11 с валами 15; четыре стояковых подшипника 12; два редуктора (синхронизатора) 13, каждый из которых состоит из четырех шестерен 14.
На фиг. 3 показана траектория движения концов штока 4 в виде улитки Паскаля. На ней также показаны используемые в дальнейшем в описании обозначения:
Rmax, Rmin - максимальное и минимальное значение радиусов вращения от оси вращения до концов штока при повороте его (от оси абсцисс на девяносто градусов (αi=90 [град.]);
Rcp - половина длины штока, или среднее значение радиуса от оси вращения до конца штока при значении угла поворота αi=0 [град.];
Ri - значение радиуса вращения конца штока 4 при его повороте на угол αi [град.];
Si - значение выбега центра масс стержня 1 с эксцентриками (ЦМ) при повороте его на угол αi [град.];
⌀d - диаметр окружности с центром в (·) Оч, представляющей собой траекторию движения ЦМ, равный значению максимального выбега Sm;
Sm - значение максимального выбега ЦМ при значении угла поворота стержня 1 αi=90 [град.]
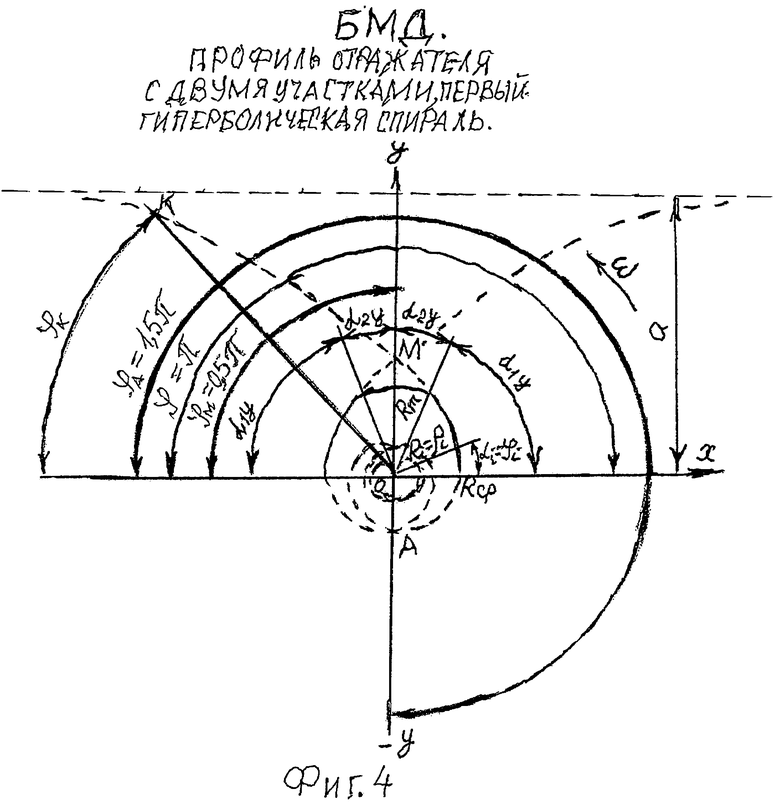
На фиг. 4 показан профиль отражателя с двумя участками, первый из которых - гиперболическая спираль, второй - дуга окружности. На фиг. 4 используются обозначения, принятые на фиг. 1 и фиг. 3, а также дополнительные:
а - асимптота, к которой стремятся ветви гиперболической спирали, расположенные симметрично относительно оси ординат у;
ρi - радиус гиперболической спирали, исходящий из асимптотической точки О, совпадающей с центром вращения стержня 1, при угле разворота гиперболической спирали φi (угол между ρi и осью абсцисс).
На фиг. 5 представлена таблица с результатами вычислений относительных значений тяговых усилий БДМ с одним (µ=1) и четырьмя (µ=4) стержнями в составе основных элементов, а также пульсаций, при отражателе с профилем в виде Улитки Паскаля.
На фиг. 6 - то же при отражателе с профилем в виде гиперболической спирали.
Осуществление изобретения
Конструкция МД состоит:
- из четырех блоков основных элементов, простейший вариант каждого из которых с одним стержнем 1 с эксцентриками 2 и 3 представлен на фиг. 1. В общем случае количество стержней 1 в составе блока основных элементов (µ) больше одного (µ>1). Так, в конструкции МД, представленной на фиг. 2, для примера число стержней 1 с эксцентриками 2 и 3 в составе блока основных элементов выбрано равным четырем (µ=4). В состав блока основных элементов входит также показанная на фиг. 1 и фиг. 2 втулка 6, связанная с валом 5 двигателя 8, и отражатель 7, устанавливаемый, как и двигатель на корпусе 9 МД.
- из показанных на фиг. 2: двух двигателей 8; двух редукторов 13 с четным числом шестерен 14, синхронизирующих работу двигателей; четырех втулочных муфт 10; восьми прижимных крышек 11; четырех стояковых подшипников 12. Валы 5 двигателей 8 через стояковые подшипники 11 соединяются с прижимными крышками 11. Редукторы 13 через втулочные муфты 10 также соединяются с прижимными крышками 11, дальними от двигателей 8.
Отражатели 7, двигатели 8, стояковые подшипники 12, редукторы 13 устанавливаются на корпусе 9 МД.
В статическом состоянии все элементы МД неподвижны; стержни 1, проходящие через отверстия на поверхности втулок 6, опираются на их края, если ось 5 двигателя 8 располагается в вертикальной плоскости. В общем случае в статическом состоянии стержни 1 опираются на края отверстий втулок 6 и поверхности отражателей.
В динамическом состоянии валы 5 двигателей 8 вращаются встречно с постоянными угловыми скоростями ω синхронно, благодаря редукторам 13, соединенным с валами 5 двигателей 8 через втулочные муфты 10.
Вместе с валами 5 вокруг их осей вращаются втулки 6 и стержни 1. Центр масс стержней 1 (ЦМ) совершают при вращении с постоянной угловой скоростью ω принудительные возвратно-поступательные движения со скоростями прямолинейных движений, зависящими от профилей одинаковых отражателей 7.
При таком движении ЦМ возникают силовые поля инерции вдоль стержней 1 в направлении от оси вращения, создающие центробежные и кориолисовы силы, внешние по отношению к МД. По мнению Потапова Ю.С. и Фоминского Л.П. [Вихревая энергетика и холодный ядерный синтез с позиций теории движения. Кишинев-Черкассы: «ОКО-Плюс», 2000]: «…источником полей инерции и причиной появления сил инерции является четырехмерное вращение системы отсчета…. центробежные силы… являются одним из проявлений сил инерции… движение вдоль… четвертой оси координат - оси времени проявляется в виде… сил инерции».
Сивухин Д.В. в работе «Общий курс физики. М.: ФИЗМАТЛИТ, изд-во МФТИ, 2005», отмечает: «Центробежные силы, как и всякие силы инерции, существуют лишь в ускоренно движущихся (вращающихся) системах отсчета, и исчезают при переходе к инерциальным системам…. Силы инерции всегда являются внешними по отношению к любой движущейся системе материальных тел…
Если тело удаляется от оси вращения, то сила 

В книге «п/р Ландсберга Г.С. Элементарный учебник физики. М.: Наука, 1975», говорится: «Для сил инерции мы можем указывать тело, на которое сила действует, но не можем указать никакого тела, со стороны которого эта сила действует… Действительно, эти силы появляются «в одиночку», а не «парой»… Нет никаких сил противодействия, приложенных к другому телу со стороны данного, да нет и «другого тела».
При описанном выше движении ЦМ на него действует центробежная сила 
Векторная сумма проекций на ось ординат центробежной и кориолисовой сил 


Значение 
Теоретические обоснования, основанные на научных знаниях, подтверждающие возможность получения при осуществлении изобретения того результата, который указан в разделе описания «Раскрытие изобретения».
Выше по работам Потапова Ю.С., Фоминского Л.П., Сивухина Д.В., Ландсберга Г.С. были указаны причины появления полей и сил инерции. В работах Петроченкова Р.Г. и Петроченкова А.Р. «Роль центробежных, гравитационных и орбитальных сил и ускорений в правильном понимании устройства и эволюции Вселенной и общей картины мира» и «Открытое письмо президенту и председателю правительства Российской Федерации с предложениями по поводу частичной модернизации российской науки», опубликованных Агентством научно-технической информации Sci Tec Library, Научно-технической библиотеки (Свид. ФС77-20137 от 23.11.2004) http://www.sciteclibraryru/rus/catalog/pages/9499.htm/
18.02.2009 и 8.03.2011 утверждается: «…центробежные силы реальны… Имеются неоспоримые экспериментальные доказательства существования центробежных сил… центробежные силы не фиктивны, они существуют в природе и могут совершать работу. Центробежные силы и ускорения реально существуют».
Изложенные выше теоретические обоснования ниже подтверждаются расчетами относительных значений скалярных величин сил, возникающих в МД.
Относительные значения центробежных и кориолисовых сил и их проекций на ось ординат вычисляются по формулам:
 ,
,
где: Nci - относительное мгновенное значение центробежной силы, действующей на ЦМ стержня 1;
Fci - мгновенное значение центробежной силы, действующей на ЦМ стержня 1 при повороте его на угол αi при вращении с постоянной угловой скоростью ω;
Fm - максимальное значение по абсолютной величине центробежной силы при максимальном значении выбега.
Fci=mω2Si,
где: m - масса стержня 1;
ω - угловая скорость вращения ЦМ;
Si - значение расстояния ЦМ от начала прямоугольных координат, расположенном в центре вращения на оси двигателя 5, или выбега, при угле поворота стержня 1 на угол αi.
Fm=Smmω2,
где: Sm - максимальное значение выбега Si.
 ,
,
где: Nкi - относительное мгновенное значение скалярной величины кориолисовой силы, действующей на ЦМ стержня 1 при повороте его на угол αi при вращении с постоянной угловой скоростью ω;
Fкi - мгновенное значение скалярной величины кориолисовой силы, действующей на ЦМ стержня 1 при повороте его на угол αi при вращении с постоянной угловой скоростью ω.
Fкi=2Uimω,
где: Ui - скорость прямолинейного движения ЦМ по лучу, проходящему через ось вращения стержня 1 (ее мгновенное значение).
 ,
,
где: dSi, dt - дифференциалы функций выбега Si и времени t соответственно;
ΔSi=Si-S(i-i),
где: Si, S(i-1) - мгновенные значения выбега ЦМ в моменты времени ti, t(i-1), в которые стержень 1 поворачивается на углы αi, α(i-1), соответственно;
Δti - время, за которое стержень 1 поворачивается на угол Δαi=αi-α(i-1),
Δti=Δαi(рад)t1(рад)=Δαi(град)t1(град),
где: Δαi(рад), Δαi(град) - углы поворота стержня 1 в радианах и градусах, соответственно;
t1(рад), t1(град) - времена поворота стержня 1 на 1 радиан и на 1 градус, соответственно;
 ,
,
где: nд - число оборотов двигателя в минуту ([об/мин]);
 ;
;
 ;
;
 .
.
 ,
,
где: Ncyi - проекция центробежной силы Nci на ось ординат при повороте стержня 1 на угол αi;
Nкyi=Nкicosαi,
где: Nкyi - проекция центробежной силы Nкi на ось ординат при повороте стержня 1 на угол αi.
Мгновенное значение тягового усилия одного стержня 1 определяется по формуле:
NTi=Ncyi+Nкyi=Nсisinαi+Nкicosαi,
где: NTi - относительное мгновенное значение скалярной величины тягового усилия ЦМ одного стержня 1.
Среднее значение тягового усилия, создаваемого µ стержнями 1, находящимся в одной втулке 6, при вращении втулки в первом квадранте прямоугольной системы координат (во втором оно будет тем же) в относительных единицах вычисляется по формуле:
 ,
,
где: NT(cp)B - среднее значение тягового усилия, создаваемого µ стержнями 1, установленными во втулке 6, при ее вращении в первом квадранте прямоугольной системы координат в относительных единицах;
µ - количество стержней 1 во втулке 6;
j - номер участка профиля отражателя 7, из q участков, соответствующих определенным кривым, из которых состоит профиль отражателя 7 (его внутренняя поверхность);
NTj(cp) - среднее значение тягового усилия одного стержня 1 на j-ом участке профиля отражателя 7 в относительных единицах;
 ,
,
где: NTji - мгновенное значение тягового усилия одного стержня в относительных единицах на j-ом участке при повороте его в первом квадранте в прямоугольной системе координат на угол αji;
αji - угол поворота стержня 1 на угол αi на участке j от минимального значения αjmin до αjmax;
αjmin, αjmax - минимальное и максимальное, соответственно, значения угла αi на j-ом участке профиля отражателя 7 в радианах.
Если интеграл, входящий в это уравнение, не является табличным, он вычисляется приближенными методами, например, по формуле парабол (Симпсона):

где:
nч - четное число равных частей;
yi=NTji.
Среднее значение тягового усилия, создаваемое блоком, в состав которого входят две втулки 6 со стержнями 1, подсоединенными к одному из двигателей 8, вычисляется в относительных единицах по формуле:
NТ(ср)Б=2NТ(ср)В,
где: NT(cp)Б - среднее значение тягового усилия, создаваемое блоком, в состав которого входят две втулки 6 со стержнями 1, подсоединенными к одному из двигателей 8.
Тяговое усилие МД и создаваемые им пульсации вычисляются по формулам:
NT(ср)МД=2NT(ср)Б,
где: NT(cp)МД - среднее значение тягового усилия МД в относительных единицах;
 ,
,
где: NTi(∑)max, NTi(∑)min - максимальное и минимальное значения в относительных единицах, соответственно, тяговых усилий, действующих от всех µ стержней 1 (на одной стороне блока), при повороте первого из них на угол αi.

где: NTi(∑) - мгновенное суммарное значение тягового усилия в относительных единицах от всех µ стержней 1 (на одной стороне блока) при повороте первого из них на угол αi.
NTi,n - мгновенное значение тягового усилия в относительных единицах каждого из µ стержней 1, размещенных во втулке 6, являющееся функцией мгновенного значения угла поворота стержня 1 под номером n на j-ом участке профиля отражателя 7 αji(n), т.е.
NTin=ƒ(αji(n)),
где:  ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;

Приведенные выше формулы в совокупности представляют математическую модель МД.
Возможность получения при осуществлении изобретения результата, указанного в разделе «Раскрытие изобретения», подтверждается расчетами, представленными на основе описанной выше математической модели МД, двух типов МД. Первый из них синтезирован с использованием профиля отражателя 7 в виде Улитки Паскаля, показанной на фиг. 3, состоит из одного участка.
Улитка Паскаля - конхоида окружности, описываемая уравнением:
Ri=Si+Rср=Smsinαi+Rcp=dsinαi+Rcp,
где: d - диаметр окружности с центром в (·) Оч (на ней лежит полюс О), по которой движется ЦМ стержня 1;
Sm=d;
Si=Smsinαi
Мгновенное значение скорости Ui прямолинейного возвратно-поступательного движения находится из равенства:

В относительных единицах мгновенные значения центробежной Nci и кориолисовой Nкi сил, а также их проекций на ось ординат Nсyi и Nкyi, соответственно, вычисляются по формулам:



Мгновенное значение тягового усилия в относительных единицах одного стержня 1 составляет:
NTi=Ncyi-Nкyi=sin2αi-2cos2αi=1-3cos2αi
Среднее значение тягового усилия в относительных единицах NT(сp) за время поворота стержня 1 на 180 [град] находится из уравнения:

Результаты вычислений по вышеприведенным формулам силовых параметров и пульсаций МД при µ=4 представлены на фиг.5.
Как видно по результатам вычислений, тяговое усилие МД с профилем отражателя в виде Улитки Паскаля создается за счет кориолисовых сил и имеет отрицательное направление по оси ординат.
Второй тип МД синтезирован с использованием отражателя 7 с двумя участками профиля, первый из которых - гиперболическая спираль с радиусом Ri=ρi, а второй - дуга окружности с радиусом Rm и центром в начале координат, лежащим на оси вращения. Профиль этого отражателя показан на фиг. 4. Уравнение гиперболической спирали в полярных координатах:
 ,
,
где: ρi - радиус-вектор i-ой точки;
а - асимптота;
φi - угол поворота радиуса-вектора относительно оси абсцисс.
Кривая состоит из двух ветвей, расположенных симметрично относительно оси ординат, каждая ветвь имеет асимптоту y=а.

Мгновенные значения выбега Si находятся по формуле:
 .
.
Мгновенное значение в относительных единицах центробежной Nci и ее проекции на ось ординат Ncyi находятся из равенств:
 ;
;
 .
.
Мгновенные значения скорости прямолинейного движения ЦМ стержня Ui вычисляется по формуле:

Мгновенные значения в относительных единицах кориолисовой силы Nкi и ее проекции на ось ординат Nкyi находятся из равенств:
 ;
;
 .
.
Мгновенные значения в относительных единицах тяговых усилий на первом участке профиля отражателя NT(ay)i определяется по формуле:

 ,
,
где:  ,
,
Мгновенные значения в относительных единицах тяговых усилий на втором участке профиля отражателя NT(2y)i определяется по формуле:
 ,
,
где: Fcyi=mω2Sm=const.
Мгновенные значения в относительных единицах тяговых усилий, создаваемых µ=4 стержнями, установленными во втулке 6, на каждом из j=2 участков профиля отражателя 7, NTji(n) находятся из уравнения:
 ,
,
где: П∈[1;2;3;4], n - номер стержня 1 и Вµ стержней 1;








где: α1i(n), α2i(n) - значения угла αi поворота одного стержня 1 с номером n на первом и втором участках профиля отражателя 7, соответственно.
Среднее значение тягового усилия, создаваемого им при повороте на 180 [град] определяется по формуле:

где: 
Результаты вычислений силовых параметров и пульсаций второго варианта МД с двумя участками профиля отражателя 7 приведены в таблице на фиг. 6.
Результаты вычислений на фиг. 1 и фиг. 2 показывают, что в первом варианте МД тяговые усилия создаются в отрицательном направлении оси ординат за счет кориолисовых сил, а во втором варианте МД - в положительном направлении оси ординат за счет центробежных сил. По абсолютной величине они практически равны и составляют: 
 ,
,  .
.
Ниже рассчитывается конструкция МД с полученным средним значением тягового усилия, представленная на фиг. 2
Вес втулки 6 Рвт вычисляется по формуле:

где: γ - удельный вес материала втулки 6 (γ=7,8 г/см3);
RВТ, rВТ - наружный и внутренний радиусы втулки 6, соответственно, rВТ≥Sm;
ас - сторона квадратных отверстий на поверхности втулки 6;
lВТ - длина втулки 6;
δВТ - толщина стенки втулки 6.
RВТ=rВТ+δВТ=Rmin-кВТSm,
где: Rmin - минимальное значение радиуса вращения конца штока 4.
кВТ - коэффициент пропорциональности;
 , где Rmin>RВТ
, где Rmin>RВТ


где: lк - длина вала 15 крышки прижимной 11;
l - расстояние между осями штоков 1;
δэ - ширина эксцентрика (2 или 3);
δп - ширина подшипника;
кп - коэффициент пропорциональности, кп≥1.
lк=l=δэ=кпδп
В качестве втулки 6 можно принять обрезок трубы стальной бесшовной горячекатаной по ГОСТ 8732-58 с параметрами:
RВТ=25 [мм], δВТ=10 [мм].
При кп=4 и параметрах типового шарикоподшипника 1000099: Rп=9,5 [мм], δп=5 [мм] - длина вала 15 составляет:
lк=4δп=4·5=20 [мм]=2 [см].
Следовательно,
lВТ=5lк=5·2=10 [см].
При ас=δВТ=1 [см]
РВТ=7.8[π·10(2·1.5+1)-2·4·12]=917.8[г]
Вес крышки прижимной 11

При rg=2 [см]
Рк=7.8π (2.52+22)=251.2[г].
Вес втулочной муфты (втулки соединительной) 10 РВС определяется по формуле:

где: RBС=rg+δВТ=2+1=3 [см];
lВС=lк=2 [см];
Следовательно,
РВС=7.8π(32-22)·2=122.5 [г].
Вес стоякового подшипника 12 РСП рассчитывается как сумма весов втулочной муфты 10 (РВС) и стояка (РС), по формуле:

где: Рс - вес стояка;
hc - высота прямоугольного стояка с квадратным сечением (bc×bc);
bс - сторона квадратного сечения стояка;

hc=Rmах+2Rn=13+2·0.95=14.9 [см]
Вес двух шестерен 14 трехступенчатого редуктора 13 Рр вычисляется по формуле:
 ,
,
где: Рш - вес одной шестерни 14 редуктора 13;

где: Rш - радиус шестерни 14;
 .
.
Вес стержня с эксцентриками 1 Рсэ определим, исходя из предположения, что он состоит из однородного прямоугольного стержня с квадратным сечением со стороной а с; двух эксцентриков, представляющих из себя однородные круглые диски с радиусами Rп и толщиной δэ.
Вес прямоугольного стержня 1 Рстк определяется по формуле:

где: lэ=2(Rcp+2Rn)=2(12+2·0.95)=27.8 [см] и принятые для расчета значения:
Rcp=12 [см], а с=1 [см].
Вес одного эксцентрика Рэ вычисляется, как вес диска радиуса Rп и толщиной δэ, по формуле:

Вес всего стержня 1 находится из выражения:
Рсэ=Рстк+2Рэ=216.8+2·44.2=305.2 [г].
Вес отражателя 7 Рот вычисляется по приближенной формуле:

Вес вращающихся элементов блока РzБ находится по формуле:

Суммарный момент инерции одного блока МД IzМД определяется из равенства:
IZБ=2IZВТ+4IZк+2IZВС+2IZp+8IZcэ,
где: IZВТ - момент инерции втулки 6 относительно оси Z,
IZк - момент инерции крышки прижимной 11,
IZВС - момент инерции втулочной муфты 10,
IZСП - момент инерции стоякового подшипника 12,
IZР - момент инерции двух шестерен 14,
IZсэ - момент инерции стержня с эксцентриками 1,
где: mВТ - масса втулки 6,


IZСП=IZВС=40.6 [г см2];
IZр=2IZш=2·770.5=1541 [г см2];
где: IZш - момент инерции одной шестерни 14;

IZсэ=IZСТ+IZэ=1425+1524=2949 [г см2],
где: IZСТК - момент инерции условного стержня длиной lэ с квадратным сечением со стороной а с;


Суммарный момент инерции одного блока МД IZБ находится из равенства:
IZБ=2IZВТ+4IZк+2IZВС+2IZСП+2IZр+82IZСЭ=
=2·198.8+4·68.8+2·40.6+2·40.6+2·1524+8·2949=
=27509 [г см2]=27.509 [кг см2]≈0,0027 [т см2].
Этому моменту инерции соответствует значение махового момента МБ вращающихся элементов блока МД, определяемого из выражения:
МБ=4gIZБ=4·9.81·0.0027=0.106 [кг м2].
МБ - маховой момент вращающихся элементов блока МД.
По полученному значению МБ выбирается электродвигатель с маховым моментом Мд≥МБ, например, типа А02-51-2 с параметрами: Mg=0,15 [кг м2], длиной двигателя Lд=343 [мм] и весом двигателя Рд=96 [кг].
Следовательно, вес станины блока Рст может составить:

Полный вес МД РМД находится из равенства:

Среднее тяговое усилие, создаваемое МД,

где: 

Разность абсолютных значений тягового усилия МД и полного (суммарного) веса МД ΔF(µ) составляет подъемную силу МД, направленную вертикально вверх, вычисляемую по формуле:

где: ΔF(µ) - подъемная сила МД при установке µ стержней в каждой втулке.
В результате вычислений получаем:
при 
при nд ⊂ [4000; 6000] [об/мин] ΔF(µ)=[184.3; 724.3] [кг];
при 
ΔF(4) ⊂ [20.14; 2163] при ng ⊂ [2000; 6000] [об/мин].
Следует иметь в виду, что часть рассчитанной подъемной силы будет израсходована на подъем аккумуляторных батарей, элементов электропривода, поворотных устройств, корпусов редукторов и некоторых других элементов конструкции МД. Поэтому, конечно, окончательный выбор и конструкции, и двигателей МД должен выполняться с увеличением полного веса МД за счет установки перечисленных выше устройств и элементов конструкции.
Значения тяговых усилий и подъемных сил наиболее существенно зависят от профиля отражателя, количества стержней 1 и числа оборотов двигателей nд.
Если тяговые усилия направлены в горизонтальном направлении, то МД может перемещаться в горизонтальном направлении при 
При 

Приведенная выше математическая модель разработана на основе предварительных экспериментальных исследований отдельных частей конструкции МД (фиг. 2) с основными элементами МД (фиг. 1), показавших:
- блок МД с тяговым усилием в горизонтальной плоскости движется в заданном направлении с тем большей скоростью, чем меньше сила трения о поверхность;
- при установке его на крутильные весы, представленные в книге И.В. Гулия «Инерция», М.: «Наука», 1982, стр. 149, рис. 45, рейка незамедлительно приходит в движение, а это означает, что в отличие от инерцоида, он создает тяговое усилие;
- при установке макета МД без синхронизаторов (без редукторов 13) на весы их вес уменьшается, если тяговое усилие было направлено вверх по вертикали, и увеличивался, если тяговое усилие было направлено вниз.




Изобретение относится к области движителей транспортных средств различных видов. Механический движитель для транспортных средств содержит механизм преобразования вращательного возвратно-поступательного движения системы эксцентриков в однонаправленное движение. Движитель состоит из двух блоков, установленных на общей станине так, что входящие в них двигатели вращаются встречно. На обоих концах двигателей установлены втулки, по которым вдоль их диаметров устанавливаются под равными углами стержни с эксцентриками, имеющие возможность совершать вращательные вместе с втулками и возвратно-поступательные движения вдоль их диаметров, движущихся принудительно по траекториям, определяемым профилем установленных и жестко соединенных между собой одинаковых и одинаково установленных отражателей в количестве, равном числу стержней, определяющим значение и направление тягового усилия. Одни концы втулок соединены с валами двигателей, а вторые соединены с шестернями редукторов, синхронизирующими встречное вращение двигателей, с помощью втулочных муфт и стояковых подшипников. Достигается создание механического движителя. 6 ил.
Механический движитель для транспортных средств, содержащий механизм преобразования вращательного возвратно-поступательного движения системы эксцентриков в однонаправленное движение, отличающийся тем, что состоит из двух блоков, установленных на общей станине так, что входящие в них двигатели вращаются встречно, на обоих концах двигателей установлены втулки, по которым вдоль их диаметров устанавливаются под равными углами стержни с эксцентриками, имеющие возможность совершать вращательные вместе с втулками и возвратно-поступательные движения вдоль их диаметров, движущихся принудительно по траекториям, определяемым профилем установленных и жестко соединенных между собой одинаковых и одинаково установленных отражателей в количестве, равном числу стержней, определяющим значение и направление тягового усилия, одни концы втулок соединены с валами двигателей, вторые соединены с шестернями редукторов, синхронизирующими встречное вращение двигателей, с помощью втулочных муфт и стояковых подшипников.
| RU 2066398 C1, 10.09.1996 | |||
| RU 2003564 C1, 30.11.1993 | |||
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2392165C1 |
| ИНГАЛЯЦИОННОЕ УСТРОЙСТВО И АППАРАТ ДЛЯ ИНГАЛЯНТА | 2014 |
|
RU2608689C1 |

