Изобретение относится к автоматическому управлению и регулированию и может быть использовано для построения систем регулирования общетехническими объектами, характеристика каналов регулирования которых описывается выражениями
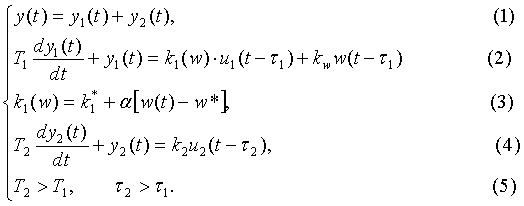
где y - выходное воздействие объекта;
w - внешнее контролируемое воздействие;
u1 и u2 - первое и второе управляющее воздействие;
T1 и T2 - постоянные времени первого и второго каналов регулирования;
τ1 и τ2 - транспортные (чистые) запаздывания первого и второго каналов регулирования;
k1, k2, kw - коэффициенты передачи;
 , α - постоянные коэффициенты;
, α - постоянные коэффициенты;
w* - опорное значение w;
t - время.
Объект управления подвержен действию неконтролируемых возмущений с нестационарными статическими свойствами.
Задача управления заключается в поддержании выходной величины y на заданном уровне y* при условии максимизации первого управляющего воздействия.
Примером описанных объектов может служить топка для сжигания водношламового топлива. Цель работы топки поддержание требуемой температуры газов (y) за счет сжигания водношламового топлива (u1) полученного из отходов углеобогащения. Однако калорийность (w) этого топлива может значительно изменяться и быть иногда недостаточной для получения заданной температуры. Тогда в топку подается высококалорийный уголь (u2), более дорогостоящий чем водношламовое топливо. Калорийность водношламового топлива влияет на его теплотворную способность, что учитывается в модели зависимости коэффициента передачи k1 от w.
Для регулирования объектов с несколькими управляющими входами известен регулятор [1], содержащий последовательно включенные первый блок сравнения, фильтр низкой частоты, обратную модель объекта, второй блок сравнения, первый экстраполятор, третий блок сравнения, первый масштабирующий блок, первый блок задержки, второй блок задержки и сумматор, выход которого соединен с вторым входом второго блока сравнения, последовательно включенные второй экстраполятор, второй масштабирующий блок, третий, четвертый и пятый блоки задержки, последовательно включенные третий экстраполятор, блок вычитания и шестой блок задержки, причем второй вход сумматора соединен с выходом пятого блока задержки, а третий вход - с выходом шестого блока задержки, выход второго блока сравнения подключен к входам второго и третьего экстраполяторов, выход первого блока задержки соединен с вторым входом третьего блока сравнения, выход третьего блока задержки - с вторым выходом блока вычитания, выход пятого блока задержки - с третьим входом блока вычитания.
При работе регулятора с помощью блоков задержки и сумматора определяется эквивалентное управляющее воздействие, из которого вычитается корректировка, найденная с помощью первого блока сравнения, фильтра низкой частоты и обратной модели объекта, в результате чего получаются оценки идеальных эквивалентных управляющих воздействий. Эти оценки экстраполируются на различные интервалы времени, а затем с помощью масштабирующих блоков и блоков сравнения определяются управляющие воздействия по каждому каналу регулирования.
Недостатком известного регулятора является то, что затраты на управление по каждому каналу распределяются равномерно. Для описываемого класса объектов необходимо максимизировать управление по первому каналу с учетом зависимости его характеристик от внешних воздействий.
Известен регулятор [2], содержащий первый блок задержки, второй блок задержки, сигнум-реле последовательно соединенные включенные первый блок сравнения, первый фильтр низкой частоты, обратная модель объекта, первый сумматор, второй блок сравнения, первый экстраполятор, второй сумматор, третий блок сравнения, первый исполнительный блок, второй фильтр низкой частоты, третий блок задержки, четвертый блок сравнения, первый масштабированный блок, ограничитель, второй исполнительный блок, третий фильтр низкой частоты, четвертый блок задержки, второй масштабирующий блок, последовательно соединенные четвертый фильтр низкой частоты, третий масштабирующий блок, последовательно соединенные пятый блок задержки, пятый блок сравнения, блок определения модуля, пятый фильтр низкой частоты, четвертый масштабирующий блок, блок умножения, выход которого соединен с вторым входом второго блока сравнения, выход второго сумматора соединен с входом пятого блока задержки и вторым входом четвертого блока сравнения, выход третьего блока задержки через второй блок задержки соединен с вторым входом первого сумматора, третий вход которого соединен с выходом второго масштабирующего блока, выход пятого блока сравнения через сигнум-реле подключен к второму входу блока умножения, выход пятого фильтра низкой частоты подключен через пятый масштабирующий блок к второму входу ограничения, первый и второй входы регулятора подключены соответственно к первому и второму входу первого блока сравнения, третий вход регулятора подключен к входу четвертого фильтра низкой частоты, первый выход регулятора соединен с выходом первого исполнительного блока, второй выход - с выходом второго исполнительного блока.
При работе регулятора на выходе первого сумматора получается сигнал о запаздывающей оценке первого идеального управляющего воздействия. Из выходного сигнала первого сумматора исключающие эффекты контролируемого внешнего воздействия и полученный сигнал экстраполируется первым экстраполятором на предстоящий интервал управления. К экстраполированному сигналу во втором сумматоре добавляется сигнал об экстраполированном эффекте контролируемого внешнего воздействия, и в результате получается сигнал о первом управляющем воздействии.
Для определения второго управляющего воздействия в четвертом блоке сравнения из выходного сигнала второго сумматора вычитается сигнал о задержанном первом управляющем воздействии. Полученный сигнал перерассчитывается в масштаб второго управляющего воздействия и через ограничитель поступает на исполнение во второй исполнительный блок.
Остальные блоки регулятора предназначены для оперативной поднастройки зоны ограничения ограничителя и корректировки первого управляющего воздействия в зависимости от ошибки его экстраполяции.
Недостатками известного регулятора являются
- низкая точность регулирования, обусловленная тем, что не учитывается зависимость коэффициента передачи первого канала регулирования от величины внешнего контролируемого воздействия;
- низкими функциональными возможностями, так как регулятор предназначен для работы с объектом, у которого второе («дорогостоящее») управляющее воздействие более динамично (имеет меньшее время чистого запаздывания), чем первое управляющее воздействие, в то время как объект управления характеризуется более динамичным первым каналом управления - меньшее время чистого запаздывания и меньшая величина постоянной времени.
Задача изобретения - повышение точности регулирования и расширение функциональных возможностей.
Поставленная задача достигается тем, что в регулятор, содержащий фильтр низкой частоты, два масштабирующих блока, два блока задержки, сумматор, ограничитель, экстраполятор, последовательно включенные первый блок сравнения, первый фильтр низкой частоты, обратную модель объекта, первый сумматор, второй блок сравнения, экстраполятор, второй сумматор, третий бок сравнения, последовательно включенные первый исполнительный блок, второй фильтр низкой частоты, первый блок задержки, последовательно включенные второй исполнительный блок, третий фильтр низкой частоты, второй блок задержки, первый вход регулятора соединен с первым входом первого блока сравнения, второй вход регулятора с входом четвертого фильтра низкой частоты, первый выход регулятора соединен с выходом первого исполнительного блока, второй выход регулятора - с выходом второго исполнительного блока, введены три модели объекта, два источника постоянного сигнала, три сумматора, при этом последовательно соединены первый источник постоянного сигнала, третий сумматор, первая модель объекта, второй вход которой соединен с выходом четвертого фильтра низкой частоты, а выход - с вторым входом второго сумматора, выход четвертого фильтра низкой частоты соединен через четвертый блок сравнения, первый масштабирующий блок, третий сумматор, третий блок задержки, вторую модель объекта с вторым входом второго блока сравнения, выход второго источника постоянного сигнала соединен с вторым входом четвертого блока сравнения, выход которого подключен через второй масштабирующий блок, четвертый сумматор к первому входу ограничителя, выход третьего источника постоянного сигнала подключен к второму входу четвертого сумматора, выход четвертого фильтра низкой частоты подключен через четвертый блок задержки к второму входу второй модели объекта, выход третьего блока задержки соединен с вторым входом обратной модели объекта, выход второго сумматора через ограничитель соединен с входом первого исполнительного блока и вторым входом третьего блока сравнения, выход которого через четвертую модель объекта и второй экстраполятор подключен к входу второго исполнительного блока, выход первого блока задержки соединен с вторым входом первого сумматора, выход второго блока задержки через третью модель объекта и пятый сумматор подключен к второму входу первого блока сравнения, второй вход пятого сумматора соединен с третьим входом регулятора, второй вход от четвертой модели объекта соединен с выходом третьего сумматора.
На чертеже приведена блок-схема регулятора, на которой приняты следующие обозначения: y - сигнал о выходной переменной объекта управления; y* - сигнал о задании на выходную переменную объекта управления; w - сигнал о контролируемом внешнем воздействии; u1 и u2 - сигналы о первом и втором управляющих воздействиях.
Регулятор содержит четвертый фильтр низкой частоты 1, четвертый блок сравнения 2, второй источник постоянного сигнала 3, первый масштабирующий блок 4, третий сумматор 5, первый источник постоянного сигнала 6, второй масштабирующий блок 7, четвертый блок задержки 8, третий бок задержки 9, четвертый сумматор 10, третий источник постоянного сигнала 11, вторую модель объекта 12, первую модель объекта 13, пятый сумматор 14, первый блок сравнения 15, первый фильтр низкой частоты 16, обратную модель объекта 17, первый сумматор 18, второй блок сравнения 19, экстраполятор 20, второй сумматор 21, ограничитель 22, первый исполнительный блок 23, первый блок задержки 24, третий бок сравнения 25, второй фильтр низкой частоты 26, четвертую модель объекта 27, третью модель объекта 28, второй блок задержки 29, третий фильтр низкой частоты 30, второй экстраполятор 31, второй исполнительный блок 32.
Регулятор работает следующим образом. Сигнал y о выходной переменной объекта в пятом сумматоре 14 алгебраически суммируется с сигналом δyu(t) об эффекте второго управляющего воздействия. Для получения δyu(t) выходной сигнал второго исполнительного блока 32 поступает на третий фильтр низкой частоты 30, где подавляется высокочастотная помеха, задерживается на интервал времени τ2 во втором блоке задержки 29 и преобразуется в третьей модели объекта 28 по второму каналу регулирования. Модель объекта 28 реализована в виде инерционного звена первого порядка с постоянной времени Т2 и коэффициентом передачи k2.
На выходе пятого сумматора 14 получается сигнал о расчетной выходной переменной yp(t), который был бы при условии, что второе управляющее воздействие равно нулю

 ,
,
где φ[u2(t-τ2)] - модель объекта по каналу преобразования второго управляющего воздействия.
Из сигнала yp(t) в первом блоке сравнения 15 вычитается сигнал y*(t) о заданном значении выходной переменной. Полученный сигнал поступает на вход первого фильтра низкой частоты 16, где подавляется высокочастотная помеха, и далее на обратную модель объекта 17 по каналу преобразования первого управляющего воздействия без учета запаздывания. На второй вход обратной модели объекта 17 поступает с выхода третьего блока задержки 9 сигнал о значении коэффициента k1, задержанного на интервал времени τ1. Обратная модель 17 объекта реализована в виде последовательного соединения звена деления, реализующего функцию  , и пропорционально-дифференцирующего звена, реализующего функцию
, и пропорционально-дифференцирующего звена, реализующего функцию  . Полученный сигнал в первом сумматоре 18 алгебраически суммируется с сигналом о первом управляющем воздействии, задержанном в первом блоке задержки 24 на интервал времени τ1. В результате на выходе первого сумматора 18 получается сигнал о запаздывающей оценке идеального первого управляющего воздействия при условии, что второе управляющее воздействие u2=0.
. Полученный сигнал в первом сумматоре 18 алгебраически суммируется с сигналом о первом управляющем воздействии, задержанном в первом блоке задержки 24 на интервал времени τ1. В результате на выходе первого сумматора 18 получается сигнал о запаздывающей оценке идеального первого управляющего воздействия при условии, что второе управляющее воздействие u2=0.

где  - обратная модель объекта 17 по первому каналу управления без учета запаздывания.
- обратная модель объекта 17 по первому каналу управления без учета запаздывания.
Сигнал о контролируемом внешнем воздействии w(t) поступает на вход четвертого фильтра низкой частоты 1, где подавляются высокочастотные помехи измерения, и через четвертый блок 8 на интервал времени τ1 подается на второй вход второй модели объекта 12. На первый вход этой модели объекта 12 поступает с выхода третьего блока задержки 9 сигнал о значении коэффициента k1, задержанный на интервал времени τ1.
Вторая модель объекта 12 получена из выражения (2) и представляет собой отношение коэффициентов  . Это отношение находится из следующих соображений: w преобразуется сначала по «прямой» модели (2) в изменение δyw, а затем с помощью «обратной» модели преобразуется в изменение δu1w первого управляющего воздействия. Тогда в операторной форме (пренебрегая зависимостью k1 от w) можно записать
. Это отношение находится из следующих соображений: w преобразуется сначала по «прямой» модели (2) в изменение δyw, а затем с помощью «обратной» модели преобразуется в изменение δu1w первого управляющего воздействия. Тогда в операторной форме (пренебрегая зависимостью k1 от w) можно записать



Полученный на выходе второй модели объекта 12 сигнал вычитается из выходного сигнала  первого сумматора 18 во втором блоке сравнения 19 и в результате получается сигнал о приведенном
первого сумматора 18 во втором блоке сравнения 19 и в результате получается сигнал о приведенном  к базовым условиям, в частности к нулевым, по контролируемому возмущению w управляющем воздействии. Сигнал
к базовым условиям, в частности к нулевым, по контролируемому возмущению w управляющем воздействии. Сигнал  экстраполируется в экстраполяторе 20 на интервал времени τ1 и поступает на первый вход второго сумматора 21. Экстраполятор 20 реализован, например, в виде реального форсирующего звена.
экстраполируется в экстраполяторе 20 на интервал времени τ1 и поступает на первый вход второго сумматора 21. Экстраполятор 20 реализован, например, в виде реального форсирующего звена.
Экстраполированный сигнал  во втором сумматоре 21 алгебраически суммируется с выходным сигналом первой модели объекта 13, тем самым получается сигнал о требуемом значении первого управляющего воздействии на текущий момент времени
во втором сумматоре 21 алгебраически суммируется с выходным сигналом первой модели объекта 13, тем самым получается сигнал о требуемом значении первого управляющего воздействии на текущий момент времени  .
.
Первая модель объекта 13 по структуре совпадает со второй моделью объекта 12, но преобразует сигналы не о запаздывающих, а о текущих состояниях.
Выходной сигнал  первого сумматора 21 ограничивается в ограничителе 22 с поднастраиваемой зоной ограничения и поступает для реализации на первый исполнительный блок 23. Выходной сигнал первого исполнительного блока 23 поступает через второй фильтр низкой частоты 26, в котором подавляются высокочастотные помеха, на вход первого блока задержки 24.
первого сумматора 21 ограничивается в ограничителе 22 с поднастраиваемой зоной ограничения и поступает для реализации на первый исполнительный блок 23. Выходной сигнал первого исполнительного блока 23 поступает через второй фильтр низкой частоты 26, в котором подавляются высокочастотные помеха, на вход первого блока задержки 24.
Из выходного сигнала  второго сумматора 21 в третьем блоке сравнения 25 вычитается выходной сигнал u1(t) ограничителя 22 и в результате получается сигнал
второго сумматора 21 в третьем блоке сравнения 25 вычитается выходной сигнал u1(t) ограничителя 22 и в результате получается сигнал  о превышении сигнала
о превышении сигнала  над ограничением
над ограничением  .
.

где  - максимально допустимое значение первого управляющего воздействия.
- максимально допустимое значение первого управляющего воздействия.
Сигнал  c выхода третьего блока сравнения 25 пересчитывается в четвертой модели объекта 27 в сигнал о втором управляющем воздействии u2(t), который экстраполируется на интервал времени δτ=τ2-τ1 вторым экстраполятором 31 и поступает для реализации на второй исполнительный блок 32.
c выхода третьего блока сравнения 25 пересчитывается в четвертой модели объекта 27 в сигнал о втором управляющем воздействии u2(t), который экстраполируется на интервал времени δτ=τ2-τ1 вторым экстраполятором 31 и поступает для реализации на второй исполнительный блок 32.
Закон функционирования четвертой модели объекта 27 в операторной форме (пренебрегая зависимостью k1 от w) имеет вид

Для отображения зависимости k1 от w на второй вход четвертой модели 27 поступает сигнал о величине k1(t) с выхода третьего сумматора 5. Поскольку время запаздывания τ2>τ1, то в схему введен второй экстраполятор 31, реализованный, например, в виде реального форсирующего звена. Четвертая модель объекта 27 реализована последовательным соединениям звена деления  и реального форсирующего звена
и реального форсирующего звена  .
.
Остальные блоки регулятора предназначены для поднастройки коэффициентов передачи моделей объекта и величины зоны ограничения ограничителя 22 первого управляющего воздействия.
Оперативное уточнение коэффициента передачи k1 первого канала управления осуществляется по выражению

где  и w* - базовые (постоянные, например, средние) значения коэффициента передачи k1 и внешнего воздействия w;
и w* - базовые (постоянные, например, средние) значения коэффициента передачи k1 и внешнего воздействия w;
 - сглаженное значение w(t);
- сглаженное значение w(t);
αk - постоянный коэффициент пересчета w в k1.
Для реализации выражения (13) в четвертом блоке сравнения 2 из выходного сигнала первого фильтра низкой частоты 1 вычитается выходной сигнал w* второго источника постоянного сигнала 3. Сигнал о полученной разности умножается в первом масштабирующем блоке 4 на коэффициент α и подается на третий сумматор 5, где алгебраически суммируется с сигналом о k* с выхода первого источника постоянного сигнала 6. Полученный на выходе третьего сумматора 5 сигнал поступает на входы третьего блока задержки 9, первой модели объекта 13 и четвертой модели объекта 27.
Величина ограничения сигнала в ограничителе 22 корректируется по выражению

где  - базовое, в частности среднее, значение u1, αu - коэффициент пересчета w в u1.
- базовое, в частности среднее, значение u1, αu - коэффициент пересчета w в u1.
Для реализации выражения 14 выходной сигнал четвертого блока сравнения 2 умножается во втором масштабирующем блоке 7 на коэффициент Lu и суммируется в четвертом сумматоре 10 с выходным сигналом  третьего источника постоянного сигнала. Выходной сигнал четвертого сумматора 10 поступает на вход ограничителя 22.
третьего источника постоянного сигнала. Выходной сигнал четвертого сумматора 10 поступает на вход ограничителя 22.
Введение новых блоков и связей позволяет расширить функциональные возможности регулятора, а также повысить точность регулирования за счет учета зависимости характеристик каналов регулирования от внешнего воздействия.
Источники информации
1. АС СССР №903802, G05B 11/01, 1980.
2. АС СССР №1037208, G05B 13/02, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор | 1982 |
|
SU1037208A1 |
| Адаптивное устройство для регулирования объектов с запаздыванием | 1982 |
|
SU1043594A1 |
| Адаптивный прогнозирующий регулятор | 1982 |
|
SU1123020A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТОВ, НАПРИМЕР, ПРОКАТНОГО ПРОИЗВОДСТВА | 1996 |
|
RU2113003C1 |
| Адаптивная система управления агломерационной установкой | 1981 |
|
SU1125604A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| РЕГУЛЯТОР | 1990 |
|
RU2015520C1 |
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
Изобретение относится к регулированию систем. Технический результат - повышение точности регулирования. Для этого в регулятор введены последовательно первый источник постоянного сигнала, третий сумматор, первая модель объекта, второй вход которой соединен с выходом четвертого фильтра низкой частоты, а выход - с вторым входом второго сумматора, выход четвертого фильтра низкой частоты соединен через четвертый блок сравнения, первый масштабирующий блок, третий сумматор, третий блок задержки, вторую модель объекта с вторым входом второго блока сравнения, выход второго источника постоянного сигнала соединен с вторым входом четвертого блока сравнения, выход которого подключен через второй масштабирующий блок, четвертый сумматор к первому входу ограничителя, выход третьего источника постоянного сигнала подключен к второму входу четвертого сумматора, выход четвертого фильтра низкой частоты подключен через четвертый блок задержки ко второму входу второй модели объекта, выход третьего блока задержки соединен с вторым входом обратной модели объекта, выход второго сумматора через ограничитель соединен с входом первого исполнительного блока и вторым входом третьего блока сравнения, выход которого через четвертую модель объекта и второй экстраполятор подключен к входу второго исполнительного блока, выход первого блока задержки соединен с вторым входом первого сумматора, выход второго блока задержки через третью модель объекта и пятый сумматор подключен к второму входу первого блока сравнения, второй вход пятого сумматора соединен с третьим входом регулятора, второй вход от четвертой модели объекта соединен с выходом третьего сумматора. 1 ил.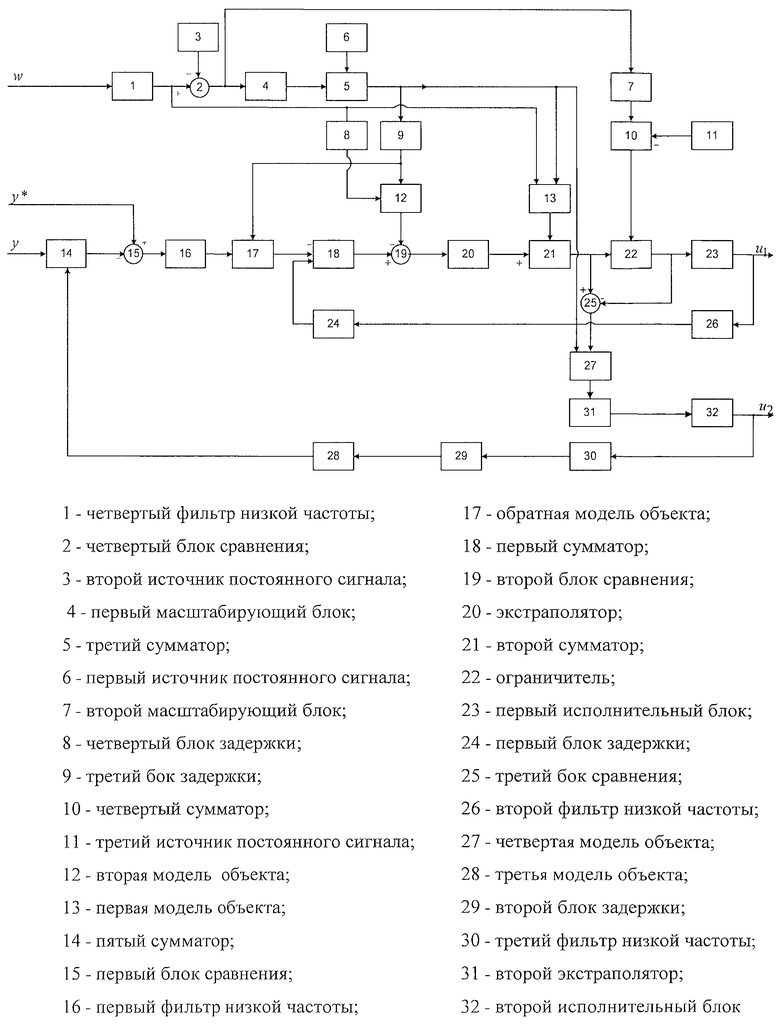
Регулятор, содержащий фильтр низкой частоты, два масштабирующих блока, два блока задержки, сумматор, ограничитель, экстраполятор, последовательно включенные первый блок сравнения, первый фильтр низкой частоты, обратную модель объекта, первый сумматор, второй блок сравнения, экстраполятор, второй сумматор, третий блок сравнения, последовательно включенные первый исполнительный блок, второй фильтр низкой частоты, первый блок задержки, последовательно включенные второй исполнительный блок, третий фильтр низкой частоты, второй блок задержки, первый вход регулятора соединен с первым входом первого блока сравнения, второй вход регулятора с входом четвертого фильтра низкой частоты, первый выход регулятора соединен с выходом первого исполнительного блока, второй выход регулятора - с выходом второго исполнительного блока, отличающийся тем, что в него введены три модели объекта, два источника постоянного сигнала, три сумматора, при этом последовательно соединены первый источник постоянного сигнала, третий сумматор, первая модель объекта, второй вход которой соединен с выходом четвертого фильтра низкой частоты, а выход - со вторым входом второго сумматора, выход четвертого фильтра низкой частоты соединен через четвертый блок сравнения, первый масштабирующий блок, третий сумматор, третий блок задержки, вторую модель объекта с вторым входом второго блока сравнения, выход второго источника постоянного сигнала соединен с вторым входом четвертого блока сравнения, выход которого подключен через второй масштабирующий блок, четвертый сумматор к первому входу ограничителя, выход третьего источника постоянного сигнала подключен к второму входу четвертого сумматора, выход четвертого фильтра низкой частоты подключен через четвертый блок задержки ко второму входу второй модели объекта, выход третьего блока задержки соединен с вторым входом обратной модели объекта, выход второго сумматора через ограничитель соединен с входом первого исполнительного блока и вторым входом третьего блока сравнения, выход которого через четвертую модель объекта и второй экстраполятор подключен к входу второго исполнительного блока, выход первого блока задержки соединен с вторым входом первого сумматора, выход второго блока задержки через третью модель объекта и пятый сумматор подключен к второму входу первого блока сравнения, второй вход пятого сумматора соединен с третьим входом регулятора, второй вход от четвертой модели объекта соединен с выходом третьего сумматора.
| Регулятор | 1980 |
|
SU903802A1 |
| Регулятор | 1982 |
|
SU1037208A1 |
| Регулятор | 1989 |
|
SU1789969A1 |
| DE 19738824, 11.03.1999. | |||

