.тий задатчики, трети сумматор, третий, четвертый, пятый и шестые блок адаптации, седьмой блок сравнения, последовательно включенные четвертый сумматор, пятый фильтр низкой частоты, восьмой блок сравнения, первый детектор знака, четвертый блок задержки, первый блок умножения, пятый сумматор, шестой фильтр низкой частоты, четвертый масштабирующий блок, шестой сумматор и второй блок умножения, последовательно включенные первый интегратор , пятый масштабирующий блок и седьмой сумматор, последовательно включенные девятый блок сравнения, второй детектор знака, пятый блок задержки и третий блок умножения, последовательно включенные второй интегратор, шестой масштабирующий блок, восьмой сумматор и четвертый блок умножения, последовательно, включенные четвертый задатчик, десятый блок сравнения,вторая модель первого канала регулирования одиннадцатый блок сравнения, обратная модель второго канала регулирования, двенадцатый блок сравнения, тринадцатый блок сравнения, седьмой фильтр низкой частоты, блок вторых эткстраполяторов, блок четырнадцатых элементов сравнения, блок седьмых масштабирующих элементов, девятый сумматор, десятый сумматор второй исполнительный орган восьмой фильт низкой частоты: и шестой блок задержки, последовательно включенные пятый задатчик, четырнадцатый блок сравнения,девятый фильтр низкой частоты, восьмой масштабирующий блок j одиннадцатый сумматор, четырнадцатый блок сравнения, блок шестьк элементов задержки, пятнадцатый блок сравнения, модель второго канала ре.гулирования и девятый масштабирующий блок, последовательно включенны десятый масштабирующий блок, седьмой блок задержки, третий экстраполятор, одиннадцатый масштабирующий блок, восьмой блок задержки и шестнадцатый блок сравнения, последовательно включенные девятый блок задержки и двенадцагый сумматор, причем первый выход объекта управления связан с первым входом девятого блока сравнения и через последова.ельно включенные третий сумм тор и первый фильтр низкой частоты с вторым входом девятого блока сравнения и первым входом первого оло- ка сравнения,, второй вход которого подключен к выходу второго задатчика, второй выход объекта управления подключен к первому входу четвертого сумматора и через восьмой блок сравнения - к входу первого интегратора и к второму входу седьмого сумматора, выход которого соединен через второй блок умножения с вторым входом четвертого сумматора, выход первого детектора знака соединен с вторым входом первого блока умножения, выход второго детектора знака - с вторым входом третьего блока умножения, выход которого подключен к второму входу пятого сумматора, выход первого задатчика через последовательно соединенные шестой сумматор и четвертый блок умножения подключен к входу третьего сумматора, выход девятого блока сравнения - к входу второго интегратора и к второму входу восьмого сумматора, выход первого блока сравнения - к второму входу одиннадцатого блока сравнения, выход третьего фильтра низкой частоты - к второму входу десятого блока сравнения, выход третьего задатчика подключен через последовательно соединенные седьмой блок сравнения и четвертый фильтр низкой частоты к входу десятого масштабирующего блока, второй вход объекта управления соединен с входом седьмого блока сравнения, выход второго масштабирующего блока через шестнадцатьш блок сравнения соединен с входом второго блока задержки, с вторым входом второго От зматора и с вторым входом пятого блока сравнения, выход двенадцатого блока сравнения подключен к первым входам третьего и четвертого блоков адаптации, выход седьмого блока задержки подключен к второму входу двенадцатого сумматора, к второму входу четвертого блока адаптации и к первому входу пятого блока адаптации, второй вход третьего блока адаптации соединен с выходом девятого блока задержки, а выход - с до- . полнительным входом восьмого масштабирующего блока, выход четвертого блока адаптации - с дополнительным
входом десятого масштабирующего блока, выход пятого блока адаптациис дополнительным входом третьего экстраполятора, выход которого связа с вторым входом пятого блока адаптации и через одиннадцатый сумматор - с входом десятого сумматора, выход двенадцатого сумматора - с вторым входом тринадцатого блока срав нения, выход второго исполнительного 1органа связан с третьим входом объ:екта управления, выход четырнад|цатого блока сравнения - с четвер|тым входом объекта управления, выход восьмого фильтра низкой частоты - с вторым входом четырнадцатого блока сравнения, выход тринадцатого блока сравнения - с вторым входом пятнадцатого,, блока сравнения, выходы блока десятых элементов задержки - с вторыми входами блока семнадцатых элементов сравнения, первый вход шестых блоков адаптации соединен с выходом седьмого фильтра низкой частоты, в горые входы - с выходами блоков вторых экстраполяторов, выходы шестых блоков адаптации - с дополнительными входами блока вторых экстраполяторов, один из выходов которых подключен к второму входу .девятого сумматора, к третьему его входу подключен выход девятого масштабирующего блока,
| название | год | авторы | номер документа |
|---|---|---|---|
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| РЕГУЛЯТОР | 1990 |
|
RU2015520C1 |
| Система автоматического регулирования | 1987 |
|
SU1476433A1 |
| Устройство для согласования производительности технологических участков | 1982 |
|
SU1100607A1 |
| Прогнозирующий регулятор | 1979 |
|
SU815713A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Регулирующее устройство | 1981 |
|
SU980069A1 |
| Адаптивный прогнозирующий регулятор | 1982 |
|
SU1123020A1 |
| Устройство для моделирования систем управления | 1984 |
|
SU1167631A1 |
АДАПТИВНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ МНОГОМЕРНОГО ОБЪЕКТА, содержащая объект управления, первый фильтр низкой частоты, последовательно включенные первый блок сравнения, обратную модель первого канала регулирования, второй блок сравнения, третий блок сравнения, второй фильтр чизкой частоты, блок первых экстра:оляторов, блок четвертых элементов сравнения, блок первых масштабируюдих элементов, первый сумматор, второй сумматор, первый исполнительный орган, третий фильтр.низкой частоты и первый блок задержки, последовательно включенные четвертый фильтр низкой частоты и второй масштабирующий блок, второй блок задержки, пятьгй блок сравнения, последовательно включенные шестой блок сравнения, первую модель первого канала регулирования и третий масштабирукиций блок, первый блок адаптации, второй блок адаптации, блок третьих элементов задержки, входы которых соединены с выходом пятого блока сравнения,один выход - с первым входом шестого блока сравнения, остальные выходы - с вторыми входа1-1И блока четвертых элементов сравнения, второй вход шестого блока сравнения подключен к выходу третьего блока сравнения, первый вход первого блока адаптации соединен с выходом второго фильтра низкой частоты, осттальные входы - с выходами блока (Q первых экстраполяторов, выход пер(Л вого блока адаптации - с дополнительным входом блока первых экстраполяторов, один выход блока первых экстраполяторов подключен к второму входу второго сумматора, к третьему входу которого подключен выход третьего масштабирующего блока, вы ход второго блока задержки соединен NU с вторым входом третьего блока сравСО нения и первым входом второго блока адаптации,первый вход пятого блока сравнения подключен к выходу третьего фильтра низкой частоты, вход которого связан с первым входом объекта управления, второй вход второго блока адаптации соединен с выходом второго блока сравнения, а выход - с дополнительным входом первого масштабирующего блока, выход первого блока задержки подключен к второму входу второго блока сравнения, отличающаяся тем, что, с целью повышения точности регулирования, в нее введены первый, второй и тре
1
Изобретение относится к области автоматического управления и регулирования и может быть использовано для построения систем управления техническими объектами, содержащих значительные запаздывания и подверженных влиянию контролируемых и неконтролируемых возмущений, характеристики которых изменяются на интервале времени запаздывания.
Динамика рассматриваемого класса объектов достаточно хорошо аппроксимируется оператором
P T l JelPl W tp), Н2,-...е,..,т,
коэффициенты усиления kj и постоянные времени Т;, которого незначительно изменяются в течение ддительности переходного процесса и имеют различные значения дпя отдельных каналов; Up, 10,,- регулирующие воздействия и контролируемые возмущения; У - целевая выходная переменная объекта управления. Кроме того, измеряются косвенные выходные переменные объекта управления, коррелированные с целевой выходной переменной.
Примером такого рода объектов слжат современные доменные печи. Целевой выходной переменной здесь является, в частности, содержание крения в чугуне; косвенной выходной переменной - содержание окиси углерода в колошниковом газе. Канал регулирования Изменение содержания кокса в подачу - изменение содер- ,
жания кремния в чугуне характеризуется временем чистого запаздывания порядка шести часов, постоянной времени инерции - четырех часов. Такими же параметрами характеризуется и канал по контролируемому возмущеншо (изменению влажности кокса) с выходом на содержание кремния в чугуне. Канал регулирования Изменение влажности дутья - изменение
содержания кремния в чугуне имеет время чистого запаздывания порядка нескольких минут и постоянную времени инерции порядка трех часов, Характеристики по каналу контролируемого возмущения (температуре дутья) имеют примерно такие же численные значения.
Целью управления является обеспечение инвариантности целевой выходной переменной (регулируемой координаты) от контролируемых и неконтролируемых внешних воздействий.
Известны регуляторы с косвенным измерением и прогнозированием неконтролируемых возмущений,, включающие обратные модели объектов регулирования, блоки задержки, экстраполяторы и блоки сравнения ClI. 3 Однако такие .регуляторы не обеспечивают ВЫСОКОЙ точности регулирования из-за того, что в них не учиты ваются в явном виде контролируемые возмущения, а также различие динамич ских характеристик по отдельным каналам регулирования и возмущений. Наиболее близким к изобретению является прогнозирующий регулятор, содержащий последовательно воюченные первый блок сравнения первый фильтр низкой частоты, обратную модель объекта без запаздывания второй блок сравнения, третий блок cpasHeiMH, второй фильтр низкой час тоты, первый зкстраполятор, первый cyi rMaTOpj исполнительный орган третий фильтр низкой частоты и первый блок задержки, выход, которого подключен к второму входу второго блока сравнения, последоватапьно сое диненные четвертый фильтр низкой час тоты, первый масштабирующий блок, второй блок задеретси, подключенный своим выходом к второму входу третьего блока сравнения, последовательн соединенные вторые экстраполяторы, четвертые блоки сравнения, вторые масштабирующие блоки, выходы которык подключены к входам второго сум матора, входы вторых зкстраполяторов соединены с выходом второго фн,пьтра низкой частоты, а выход второго сум матора - с одним -из входов первого сумматора, последовательно соедр ненные пятый блок сравненияg инерционное звено первого порядка,,третий масштабирующий блок.5выход которого соединен с одним из входов второго блока суммированияJ шестой блок сравнения, подключенный своими входа ми к выходу третьего ф1-тътра низкой частоты и выходу пер.врго масштабирующего блокаJ который соединен также с одним из входов первого сумматора, третьи блоки задержки, входы которых соединены с выходом шестого блока сравнения, выход последнего из третьих блоков задержки подключен к входу пятого блока сравнения, выходы остальных - к входам четвертых блоков сравнения за исключением первого из них, вход которого соединен с выходом пятого блока .сравнения второй вход пятого блока сравнения соединен с выходом третьего блока сравнения, последовательно включенные четвертые блоки задержки, седьмы 1,4 блоки сравнения и первые блоки адаптации, выход первого из которых соединен дополнительным входом первого экстраполятора, выходы остальных с дополнительнБ1ми входами вторых экстраполяторов, вторые входы седьмых блоков сравнения соединены с выходом второго фильтра низкой частоть, вход первого из четвертых блоков задержки - с выходом первого экс раполятора, входы остальных четвертых блоков задержки - с выходом первого экстраполятора, входы остальных четвертых флоков задержки - с выходами вторых/экстраполяторов, выход первого блока задержки соединен также через восьмой блок сравнения и второй блок адаптации с дополнительным входом первого масштабирующего блока второй вход восьмого блока сравнения подключен к выходу второго блока сравнения 2, Недостатком известного прогнозирующего регулятора является низкая точность регулирования, обусловленная тем, что не учитьгеается различие динагдаческих характеристик по отдельным каналам регулирования и возмущений, а также не используется косвенная выходная переменная объекта управления. Целью изобретения является повьш1е-( ние точности регулирования. Поставленная цель достигается тем, что в адаптивную систему регулирования многомерного объекта содержащую объект управления, первый фильтр шзкой частоты, последовательно включенные первый блок срав 1ения, обратную модель первого канала регулирования, второй блок сравнения, третий блок сравнения, второй фильтр низкой частоты, блок первых экстраполяторов, блок четвертых элементов сравнения, блок первых масичтабирующих элементов, первый сумматор, второй сумматор, первый исполнительный орган, третий фильтр низкой частоты и первый .блок задер)ски, последовательно включенные четвертый фильтр низкой частоты и второй масштабирующий блок, второй блок задержки, пятый блок сравнения, последовательно включенные шестой блок сравнения, первую модель первого канала регулирования итретий масштабирующий блок, первый блок адаптации, второй блок
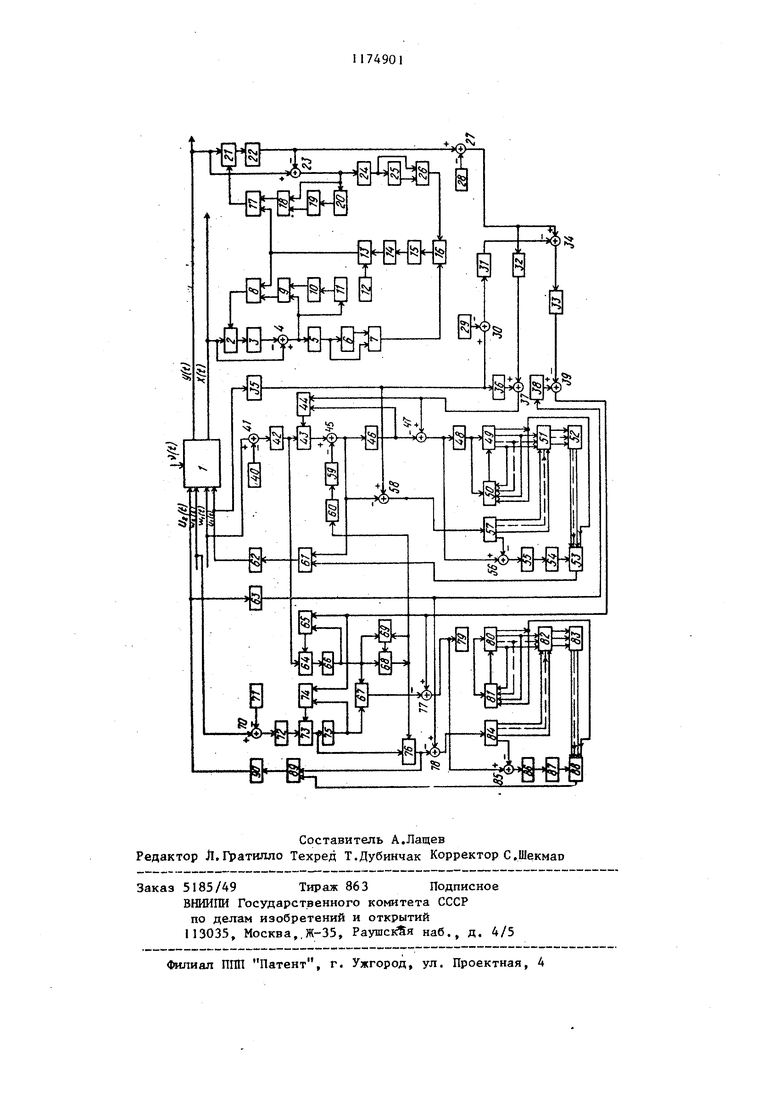
адаптации, блок третьих элементов задержки, входы которых соединены с выходом пятого блокасравнения, один выход - с первым входом шестого блока сравнения, остальные выходы - с вторыми входами блока четвертых элементов сравнения, второй вход шестого блока сравнения подключен к выходу третьего блока сравнения, вход первого блока адаптации соединен с выходом второго фильтру низкой частоты, остальные входы - с выходами блока первых экстраподяторов, выход первого блока адаптации - с дополнительным входом блокаПервых экстраполяторов , один выход блока первых экстраполяторов подключен к второму входу второго сумматора, к третьему входу которого подключен выход третьего масштабирующего блока, выход второго блока задержки соединен с вторым входом третьего блока сравнения и первым входом второго блока адаптации, первый вход пятого блока сравнения подключен к выходу третьего фильтра низкой частоты, вход которого связан с первым входом объекта управления, второй вход второго блока адаптации соединен с выходом второго блока сравнения, а вьгход - с дополнительным входом первого масштабирующего блока, выход первого блока задержки подключен к второму входу второго блока сравнения, введены , второй и третий задатчики, третий сумматор, третий, четвертый, пятый и шестые блоки адаптации, седьмой блок сравнения, последовательно включенные четвертый сумматор, пятый jфильтр низкой частоты, восьмой блок сравнения, первый детектор знака, четвертый блок задержки, первый блок умножения, пятый сумматор, шестой фильтр низкой частоты, четвертый масштабирующий блок, шестой сумматор и второй блок умножени последовательно включенные первый интегратор, пятьй масштабирующий блок и седьмой сумматор, последовательно включенные девятый блок сравнения, второй детектор знака, пятый блок задержки и третий блок умножения , последовательно включенньш второй интегратор, шестой масштабирующий блок, восьмой сумматор и четвертый блок умножения, последовательно включенные четвертьш задатчик, десятый блок сравнения., вторая модель первого канала регулирования , одиннадцатый блок сравнения, обратная модель второго канала регулирования, двенадцатый блок сравнения, тринадцатый блок сравнения, седьмой фильтр низкой частоты, блок вторых экстраполяторов, блок четырнадцатых элементов сравнения,блок седьмых масштабирующих элементов, девятый сумматор, десятый сумматор, второй исполнительный орган, восьмой фильтр низкой частоты и шестой блок задержки, последовательно включенные пятый задатчик, четырнадцатый блок сравнения, девятый фильтр низкой частоты, восьмой масштабирую111Ий блок, одиннадцатый сумм.атор, четырнадцатый блок сравнения, блок шестых элементов задержки,пятнадцатьй блок сравнения,модель второго канала регулирования и девятый масштабирующий блок, последовательно включенные деся-. тый масштабирующий блок, седьмой блок задержки, третий экстраполятор, одиннадцатый масштабирующий блок, восьмой блок задержки и шестнадцатый блок сравнения, последовательно включенные девятый блок задержки и двенадцатый сумматор, причем первый выход объекта управления связан с первым входом девятого блока сравнения и через последовательно включенные .третий сумматор и первый фильтр низкой частоты - с вторым входом девятого блока сравнения и первым входом первого блока сравнения, второй вход которого подключен к выходу второго задатчика, второй выход объекта управления подключен к первому входу четвертого сумматора и через восьмой блок сравнения - к входу первого интегратора и к второму входу седьмого сумматора, выход которого соединен через второй блок умножения с вторым входом четвертого сумматора, выход первого детектора знака соединен с вторым входом первого блока умножения, выход второго детектора знака - с вторым входом третьего блока умножения , выход которого подключен к второму входу пятого сумматора, выход первого задатчика через последовательно соединенные шестой сумматор и четвертый блок умноже7ния подключен к входу третьего сумматора, выход девятого блока ср нения - к входу второго интегратора и к второму входу восьмого сумм тора, выход, первого блока сравнени к второму входу одиннадцатого блока сравнения, выход третьего фил тра низкой частоты т- к второму вход десятого блока сравнения, выход третьего задатчика подключен через последовательно соединешше седьмой блок сравнения и че.твертый фильтр низкой частоты к входу десятого масштабирующего блока, второй вход объекта управления соединен с вход седьмого блока сравнения, выход вто рого масштабирующего блока через шестнадцатый блок сравнения соединен с входом второго блока задерж ки, с вторым входом второго сумматора и с вторым входом пятого блока сравнения, выход двенадцатого блока сравнегшя подключен к первым входам третьего и четвертого блоков адапта ции, выход седьмого блока задержки подключен к второму входу двенадцатого сумматора, к второму входу , четвертого блока- адаптации и к первому входу пятого блока адаптации, второй вход третьего блока адаптации соединен с выходом девятого блока задержки, а выход - с дополнительным входом восьмого масштабирующего блока, выход четвертого блока адаптации - с дополнительным входом десятого масштабир тощего бло ка, выход пятого блока адаптации с дополнительным входом третьего экстраполятора, выход которого связан с вторым входом пятого блока адаптации и через одиннадцаты сумматор - с входом десятого cyi матора, выход двенадцатого сумматора - с вторым входом тринадцатого блока сравнения, выход второго исполнительного органа связан с.треть им входом объекта управления входчетырнадцатого блока сравнения - с (четвертым входом объекта управления выход восьмого фильтра низкой частоты - с вторым входом четырнадцато го блока сравнения, выход тринадцат го блока сравнения - с вторым входом пятнадцатого блока сравнения,, выходы блока десятых элементов задержки - с вторыми входами блока семнадцтых элементов сравнения, первый шестых блоков адаптации соединен с выходом седьмого 8 ; фильтра низкой частоты, вторые входы - с выходами блоков вторых экстраполяторов, выходы шестых блоков адаптации с дополнительными-входами блока вторых экстраполяторов, один из выходов которых подключен к второму входу девятого сумматора, к третьему его входу подключен выход девятого масштабирующего блока. Предлагаемая адаптивная система прогнозирующего регулирования объекта имеет два канала регулирования. Первый канал регулирования имеет по сравнению с вторым меньшее время запаздывания. Время запаздывания по каналу первого возм-ущения также меньше, чем по каналу второго возмущения. По аналогии с предлагаемой системой могут быть построены системы регулирования и для большего числа управляющих воздействий и контролируемых возмущений. На чертеже приведена блок-схема предлагаемой системы.регулирования, где U(t) и ) - первое и второе управляющие воздействия в t-ый момент времени; v/i(t) и Й2 первое и второе контролируемые возмущения5 y(t) - целевая выходная переменная; x(t) - косвенная выходная переменная; -oU) . неконтролируемоевозмущение, . Адаптивная система регулирования многомерного объекта содержит f объект 1 управления, четвертьш сумматор 2, пятый фильтр 3 низкой частоты, восьмой блок 4 сравнения, первьш детектор 5 знака, четвертый блок 6 задержки, первый 7 и второй 8 блоки умножения, седьмой сумматор 9, пятый масштабирующий блок 10, первый интегратор 11, первый задатчик 12, шестой сумматор 13, четвертьгй масштабирующий блок 14, шестой фильтр 15 низкой частоты, пятый сумматор 16, четвертый блок 17 умножения, восьмой сумматор 18, шестой масштабирующий блок 19, второй интегратор 20, третий сумматор 21, первый фильтр 22 низкой частоты, девятый блок 23 сравнения, второй детектор 24 знака, пятый блок 25 задержки, третий блок 26 умножения, первый блок 27сравнения, второй 28 и четвертый 29 задатчики, десятый блок 30 сравнения, вторую модель 31 первого канала регулирования, обратную модель 32 первого канала ре91гулирования,обратную модель 33 второ го канала регулирования, одиннадцатый блок 34 сравнения, третий фильтр 35 низкой частоты, первый бло 36 задержки, второй блок 37 сравнения,шестой блок 38 задержки, двенад цатый блок 39 сравнения, третий задатчик 40, седьмой блок 41 сравнени четвертый фильтр 42 низкой частоты, второй масштабируюшлйблок 43,второй блок 44 адаптации, шестнадцатый блок 45 сравнения, второй блок 46 за держки, третий блок 47 сравнения, второй фильтр 48 низкой частоты, блок 49 первых экстраполяторов, первые- блоки 50) адаптации, блок 51 четвертых элементов сравнения, блок 52 вторых масштабирующих элементов, первый сумматор 53, третий масштабирующий блок 54, первую модель 55 первого канала регулирования,шестой блок 56 сравнения, бло11.57 третьих элементов задержки, пятый блок 58 сравнения, восьмой блок 59 задержки одиннадцатый масштабирующий блок 60, второй сумматор 61, первый испол нительный орган 62, восьмой фильтр 63 низкой частоты, десятый масштабирующий блок 64, четвертый блок 65 адаптации, седьмой блок 66 задержки, двенадцатый сумматор 67, третий экстраполятор 68, пятый блок 69 адаптации, четырнадцатый блок 70 сравнения, пятый задатчик 7 девятый фильтр 72 низкой частоты, восьмой масштабирующий блок 73, третий блок 74)адаптации, девятый блок 75 задержки, одиннадцатый сумматор 76, тринадцатый блок 77 сравнения, четырнадцатый блок 78 сравнения, седьмой фильтр 79 низкой частоты, блок 80 вторых экстраполяторов, шестые блоки 81 адаптации, блок 82 четырнадцатых элементов сравнения, блок 83 седьмых масш-табируюш 1х элементов, блок 84 шестых элементов задержки, пятнадцатый блок 85 сравнения, модель 86 второго кана ла регулирования, девятый масштабиру щий блок 87, девятый сумматор 08, десятый сумматор 89, второй исполнительный орган 90. . Адаптивная система регулироваш1я многомерного объекта работает следую щим образом. Для оценивания полезной составля ющей целевой выходной переменной y(t) сигнал с выхода объекта 1 упра 110 ления о косвенной переменной x(t) поступает на вход четвертого сумматора 2, где суммируется с сигналом о корректировке 4x(t), поступающим с выхода второго блока 8 умножения. Выходной сигнал четвертого сумматора 2 сглаживается в пятом фильтре 3 низкой частоты rf вычитается в восьмом блоке 4 сравнения из сигнала x(t). Сигнал о полученной разности 4x(t) поступает на первый детектор 5 знака, функционирование которого описывается выражениемi+1 ПРИ Ax(t)70 , -1 при /lx(t):0 .s „ (I) в котором dXgbiltj - выходной сигнал детектора 5 знака. С выхода первого детектора 5 знака сигнал поступает через четвертый блок 6 задержки на первый блок.7 умножения, где умножается на сигнал,поступающий непосредственно с выхода первого детектора 5 знака. Выходной сигнал первого блока 7 умножения trjt).(t) signjx(t-t) (2) характеризует автокорреляцию сиг:дала 4x(t) и принимает значения ч-I или -1. Если имеются систематические отклонения регистрируемого сигнала x(t) в ту или иную CTOpoiry от его сглаженных значений x(t), то сигнал ) принимает значение +1. Если регистрируемый сигнал x(t) колеблется около его сглаженных значений 5i(t), то сигнал ) принимает значение -I Таким же образом преобразуется сигнал y(t) с помощью третьего сумматора 21, первого фильтра 22 низкой частоты, девятого блока 23 сравнения, второго детектора 24 знака, пятого блока 25 задержки и третьего блока 26 умножения. На выходе последнего получается сигнал )sign4Y(t) signAY(t -Г). (З) С выходов первого 7 и третьего 26 блоков умножения сигналы поступают на входы пятого сумматора 16, выходной сигнал которого f(t) (ЛсСЬ) +cf)(t) сглаживается в шестом фильтре 15 низкой частоты.. Сглаженный сигнал ((t) умножается в четвертом масштабирующем блоке 14 на постоянный коэффициент, а затем суммиру ется в шестом сумматоре 13 с постоянным сигналом, nojCTynaroinHM с вы хбда первого задатчика 12. Выходной сигнал восьмого блока сравнения через первый интегратор 11 поступает на пятый масштабирую- щий блок 10, где умножается на коэ фициент f/Тд, и подается на -седьмой сумматор 9, в котором суммируется с выходным сигналом восьмого блока 4 сравнения. Сигнал с выхода седьмого сумматора 9 умножается во втором блоке 8 умножения на выходной сигнал k(t) шестого сумматора 13. В результате на выходе вт рого блока 8 умножения получается сигнал Z(t) k(t)ECt) (tUt , ( п J где f(t) - выходной сигнал восьмо блока 4 сравнения. Сигнал z(t) сумм руется в четвертом сумматоре 2 с сигналом x(t), т.е. на x{t) нан сится координатное воздействие, ко рое позволяет выходному сигналу пя того фильтра 3 низкой частоты боле точно отслеживать полезную составляющую сигнала x(t).Аналогичным образом с помощью второго интегратора 20, шестого масштабирующего блока 19, восьмого сумматора 18,, четвертого блокд 17 умножения и третьего сумматора 8 корректируется выходной сигнал о целевой переменной объекта 1 управления и в результате на выходе первого фильтра низкой частоты получается сигнал о полезной составляющей y(t). Из выходйого сигнала первого фильтра 22 низкой частоты в первом блоке 27 сравнения вычитается выход ной сигнал второго задатчика 28 о заданном значении целевой вьпсодной переменной y(t). На выходе первого блока 27 сравнения получается сигнал о величине ошибки регулирования, который используется для выработки и первого, и второго управляющих воздействий. Для выработки первого управляющего воздействия по каналу регулиро вания с меньшим временем запаздьша ния сигнал с выхода первого блока 2 сравнения поступает на обратную мог дель 32 первого канала регулиррва1,12 ния без учета запаздывания, в частности пропорционально-дифференциальное звено. Выходной сигнал обратной модели 32 первого канала регулирования вычитается во втором блоке 37 сравнения из сигнала о реализованном в момент (t - t,,) первом управлении (где время запаздьтания первого канала регулирования), поступающим с выхода первого блока 36 задержки. Выходной сигнал второго блока 37 сравнения является оценкой идеального первого управления 11°, найденной с запаздыванием по выражению и;(-.).(.с). в котором y(t) и y(t) - полезный сигнал о целевой выходной переменной и заданное значение целевой выходной переменной; обратная модель первого канала регулирования без учета запаздывания. Первое контролируемое возмущение v(/(t) учитывается следующим образом. В седьмом блоке 41 сравнения из сигнала о первом контролируемом возмущении w(t), поступающего с второго входа объекта 1 управления, вычитается сигнал об опорном значении w(t), поступающий с выхода третьего задатчика 40, Сигнал о полученной разности идет на четвертый фильтр 42 низкой частоты, где подавляется высокочастотная помеха, и далее на второй масштабирующий блок 43, в котором умножается на коэффициент и пересчитывается в масштаб управляющего воздействия а, С выхода второго масштабирующего блока 43 сигнал поступает на шестнадцатый блок 45 сравнения,где из него вычитается сигнал об экстраполированных значениях корректировок второго управляющего воздействия по отклонениям первого контролируемого возмущения, пересчитанных в одиннадцатом масштабирующем блоке 60 в масштаб первого управления и приведенных с помощью восьмого блока 59 задержки к одному временному срезу с корректировками, полученными во втором масштабирующем блоке 43. Выполнение этих операций вызвано тем, что при вьфаботке второго управления учитьюаются экстраполированные значения отклонений W(t) от его опорных значений, а при выработке 13 первого управления не требуется учитывать эти отклонения. Вьшодной сигнал шестнадцатого бл ка 45 сравнения о корректировке пер вого управления по отклонениям первого контролируемого возмущения задерживается на время f во втором блоке 46 задержки и затем вычитается в третьем блоке 47 сравнейия из сигнала ll|°(t-Tj, поступающего с 1 - 1 выхода второго блока 37 сравнения, В результате из оценки идеального первого управления исключаются эффекты изменения первого контроли руемого возмущения и получается оценка .приведенного идеального управления (t- С), которое имеет уже более гладкие свойства, что поз воляет повысить точность его экстраполяции . Оценка приведенного идеального первого управления и (t - t) экстраполируется в виде траектории на интервале времени от (t- с) до (t+49 Д лС(1/10-1/20)1. С этой целью полученный в третьем бло ке 47 сравнения сигнал поступает на второй фильтр 48 низкой частоты, в котором усредняется на интервале времени лС ,и идет на блок 49 первы экстраполяторов. На выходе последнего получается сигнал и(в), где 9e{t-r,,t-ч,-л,,...,-t-Г,-kдt;,...,, в пятом блоке 58 сравнения из сигнала о фактическом первом управлении с выхода третьего фильтра 35 низкой частоты вычитается выходной сигнал шестнадцатого блока 45 сравнения и получается сигнал о приведенном фактическом первом управлении. Этот сигнал поступает на вхо ды блока 57 третьих элементов задержки, где задерживается на интерв лы йС,. .., k лГ,... , С , т.е. запоминается траектория приведенных фактических первых управлений. В шестом блоке 56 сравнения из выходного сигнала третьего блока 57 задержки вычитается сигнал с выхода третьего блока 47 сравнения и получается сигнал о разности между приведенным фактическим первым управле нием и приведенной оценкой идеального первого управления. Сигнал об этой разности направляется в первую модель 55 первого канала регулирова ния без учета запаздывания, а за.тем 1 через третий масштабирующий блок 54 - на третий вход первого сумматора 53. В блоке 51 четвертых элементов сравнения определяется разность между сигналами об экстраполированных и фактических значениях приведенного первого управления на интервале от ( i - ч,) до t. Сигналы о полученной разности умножаются на весовые коэффициенты в блоке 52 первых масштабирующих элементов и подаются на первые входы первого сум-t матора 53. На второй вход сумматора 53 поступает сигнал (t с выхода одного из первых экстраполяторов 49. В первом сумматоре 53 суммируется сигнал об экстраполирован-ном приведенном управлении с корректировками по разности между приведенным фактическим и приведенной оценкой идеального управления, а также между приведенным фактическим и экстраполированным управлениями, т.е.вводятся корректировки ошибок экстраполяции с весовыми коэффициентами. Выходной сигнал первого сумматора 53 поступает на вход второго сум- . матора 61, где суммируется с выходным сигналом шестнадцатого блока 45 сравнения, т.е. экстраполированное приведенное первое управляющее в УЭдействие пересчитывается на фактические значения первого контролируемого возмущения. С выхода второго сумматора 61 сигнал поступает на первый исполнительный орган 62, выход которого связан с первым управляющим входом объекта 1 управления. Регистрируемый сигнал об u(t) подается на третий фильтр 35 низкой частоты, где подавляются помехи контроля, на вход первого блока 36 задержки и на вход пятого блока 58 сравнения. Для повьппения степени компенсации изменчивости статистических характеристик оценок приведент идеальных управлений адаптируются параметры блока 49 первых экстраполяторов. При условии, что оператор каждого экстраполятора представлен выражением + 1 ) Т Сэ- интервал экстрапов котором ляции; -Тф - постоянная времени фор15сирующего звена,адаптацию Т можно производить согласно закону Тфа)Л ) ло( лО(в1Лв t-« i-Zd t -t-ы Ь T teidieтфс©)о1е где (e)u;(e) -u;i:0); a,b и d постоянные величины. Для реализации выражения (7) на первый блок 50 адаптации поступают сигналы с выхода второго фильтра 48 низкой частоты и с выходов первых экстраполяторов 49. Выходной сигнал первого блока 50 адаптации поступае на дополнительный вход блока 49 пер вык экстраполяторов. Изменчивость характеристик объек та 1 управления по отношению к конт ролируемым внешним воздействиям учи тывается путем адаптации пересчетного коэффициента k второго масшт бирующего блока 43. Для этого на .входы второго блока 44 адаптации подаются сигналы с выхода второго блока 46 задеряски и с выхода второг блока 37 сравнения. Во втором блоке 44 адаптации реализуется, в част ности, процеду а. ()(e-cj u; e-Tj-ur , где L интервал времени интегриров |ния; приращения первого контролируемого возмущения; опорно значение оценок первого идеального управления, Выходной сигнал второго блока 44 адаптации поступает на дополнительный вход второго масштабир ющего блока 43. При выработке второго управляюще го воздействия по каналу регулирова ния с большим запаздыванием предварительно исключаются из ошибки регулирования целевой выходной переменной эффекты первого управля1ющего воздействия. С этой целью .полезный сигнал с выхода третьего фильтра 35 низкой частоты подается на вход десятого блока 30 сравнения, где из u(t) вычитается сигнал о его Опорном значении,Поступающий с выхода четвертого задатчика 29. Сигнал о полученной разности подается на вторую модель 31 первого канала регулирования, на выходе которой получается сигнал об эффекте изменений первого управляющего воздействия. Выходной сигнал второй модели 31 первого канала регулирования вычитается в одиннадцатом блоке 34 сравнения из выходного сигнала первого блока 27 сравнения, тем самым из ошибки регулирования исключаются эффекты Изменений первого управляющего воздействия. Аналогично выработке первого управляющего воздействия с помощью обратной модели 33 второго канала регулирования без учета запаздывания шестого блока 38 задержки, двенадцатого блока 39 сравнения и восьмого фильтра 63 низкой частоты определяются оценки идеального второго управления uz. (t С,) с запаздыванием на время 2,0 выхода двенадцатого блока 39 сравнения сигнал о u(t -Cj) поступает на тринадцатый блок 77 сравнения, где из него вычитается сигнал о корректировке второго управляющего воздействия отклонениям первого и второго контролируемых возмущений от их опорных значений. Сигнал о uU2m рассчитывается следующим образом. Сигнал об изменениях контролируемого первого возмущения с выхода :четвертого фильтра 42 низкой частоты подается на вход десятого масштабирующего блока 64, в котором умножается на пересчетный коэффициент, пересчитывается в масштаб второго управляющего воздействия И подается через седьмой блок 66 задержки на вход двенадцатого сумматора 67. Сигнал о контролируемом втором возмущении аналогично первому возмущению подается с четвертого входа объекта 1 управления на четырнадцатьй блок 70 сравнения, где из него вычитается сигнал о его опорном значении, поступающий с выхода пятого задатчика 71. Далее сигнал подается через девятый фильтр 72 низкой частоты и восьмой масштабирующий блок 73 на вход девятого блока 75 задержки, где задерживается на интервал времени Tj. Сигнал с выхода девятого блока 75 задержки подается на вход двенадцатого сумматора 67, где и суммируется с сигналом с выхода седьмого блока 66 задержки, в результате чего получае ся суммарная корректировка второго управления iiUjj Ct- 2) по отклонениям первого и второго контролируемых во мущений. Выходной сигнал тринадцатого бло ка 77 сравнения о приведенном втором Идеальном управлении обрабатывается так же, как и сигнал о приведенном первом идеальном управлении. Для этого используются седьмой фильтр 79 низкой частоты, блок80 вторых экстр поляторов, блок 82 четырнадцатых эле ментов сравнения, блок 83 седьмых масштабирующих элементов и девятый сумматор 88. Однако при Определении приведенно го фактического второго управления его корректировка по контролируемым возмущениям рассчитывается иначе. Сигнал с выхода седьмого, блока 66 задержки поступает на вход третьего экстраполятора 68, в котором экстраполируется на времени ( С), а затем поступает на вход одиннадцатого сумматора 76, где суммируется с выходным сигналом вось мого масштабирующего блока 73.На выходе одиннадцатого сумматора 76 получается сигнал о корректировке второго управления по контролируемым возмущениям на текущий момент времени. Этот сигнал и вычитается в четырнадцатом блоке 78 сравнения из полезного сигнала о фактическом втором управлении, идущего с выхода восьмого фильтра 63 низкой частоты. Полученный на выходе четырнадцатого блока 78 сравнения сигнал обрабатывается так же, как и при выработке первого управляющего воздействия. Для этого используются блок 84 десятых элементов задержки, пятнадцатый блок 85 сравнения, модель 86 второго канала регулирования без учета запаздывания, девятый масштабирующий блок 87. Выходной сигнал девятого сумматора 88 о втором приведенном Э1«:траполированном управлении поступает на вход десятого сумматора 89, где к нему подсумнируется сигнал с выхода одиннадцатого cyMMatopa 76, в результате получается сигнал о втором управляющем воздействии, который подается на второй исполнительный орган 90 и далее на второй управляющий вход объекта 1 управления. Изменчивость статистических характеристик оценок второго идеального управления учитывается с помощью шест&1х блоков 81 адаптации, а изменчивость статистических характеристик корректировок второго управления по отклонениям контролируемого первого возмущения - с помощью пятого блока 69 адаптации. Функционирование пятого 69 и шестых 81 блоков адаптации осуществляется аналогично выражениям (6) и (7). Изменчивость характеристик объекта 1 управления по отношению к первому и второму контролируемым возмущениям учитывается с помощью третьего 74 и четвертого 65 блоков адаптации. Функционирование этих блоков адаптации описывается аналогично выражениям (8) и (9). Применение предлагаемой адаптивной системы прогнозирующего регулирования на доменных печах позволит (по результатам имитационного моделирования) получить экономический эффект порядка 300 тыс.руб. в год на одну доменную печь большого объема за счет увеличения ее производительности на 1%, экономии удельного расхода кокса на 3 кг на тонну чугуна, повышения степени стабилизации химсостава чугуна на 20%.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Анализ и синтез систем управления с запаздыванием | |||
| М., Машиностроение, 1974, с.214-215 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Прогнозирующий регулятор | 1979 |
|
SU815713A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
